

Automation 2024, 5(2), 68-89; https://doi.org/10.3390/automation5020006 - 15 Apr 2024
Abstract
The increasing prevalence of upper and lower extremity (ULE) functional deficiencies presents a significant challenge, as it restricts individuals’ ability to perform daily tasks independently. Robotic devices are emerging as assistive devices to assist individuals with limited ULE functionalities in activities of daily
[...] Read more.
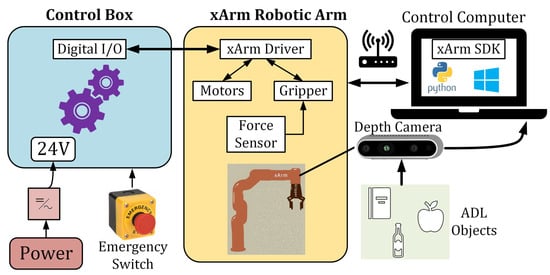
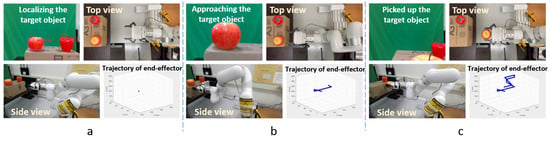
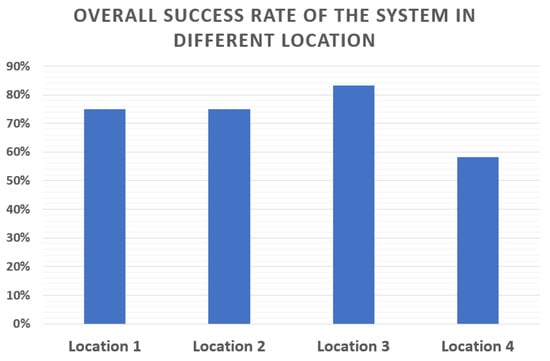
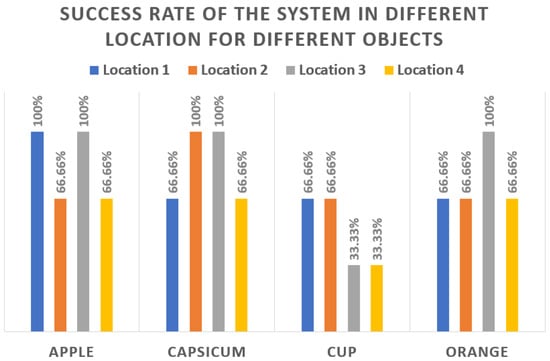
The increasing prevalence of upper and lower extremity (ULE) functional deficiencies presents a significant challenge, as it restricts individuals’ ability to perform daily tasks independently. Robotic devices are emerging as assistive devices to assist individuals with limited ULE functionalities in activities of daily living (ADLs). While assistive manipulators are available, manual control through traditional methods like joysticks can be cumbersome, particularly for individuals with severe hand impairments and vision limitations. Therefore, autonomous/semi-autonomous control of a robotic assistive device to perform any ADL task is open to research. This study addresses the necessity of fostering independence in ADLs by proposing a creative approach. We present a vision-based control system for a six-degrees-of-freedom (DoF) robotic manipulator designed for semi-autonomous “pick-and-place” tasks, one of the most common activities among ADLs. Our approach involves selecting and training a deep-learning-based object detection model with a dataset of 47 ADL objects, forming the base for a 3D ADL object localization algorithm. The proposed vision-based control system integrates this localization technique to identify and manipulate ADL objects (e.g., apples, oranges, capsicums, and cups) in real time, returning them to specific locations to complete the “pick-and-place” task. Experimental validation involving an xArm6 (six DoF) robot from UFACTORY in diverse settings demonstrates the system’s adaptability and effectiveness, achieving an overall 72.9% success rate in detecting, localizing, and executing ADL tasks. This research contributes to the growing field of autonomous assistive devices, enhancing independence for individuals with functional impairments.
Full article
(This article belongs to the Collection Smart Robotics for Automation)
►
Show Figures
Figure 1








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}