Automation in Intelligent Transportation Systems
A topical collection in Automation (ISSN 2673-4052).
Viewed by 15573
Share This Topical Collection
Editor
 Dr. Chen Lyu
Dr. Chen Lyu
Dr. Chen Lyu
E-Mail
Website
Collection Editor
Associate Professor, School of Mechanical and Aerospace Engineering, Nanyang Technological University, Singapore 639798, Singapore
Interests: automated driving; human–machine systems; intelligent electric vehicles; human–robot collaboration; cyber–physical systems
Special Issues, Collections and Topics in MDPI journals
Topical Collection Information
Dear Colleagues,
The mobility system is undergoing a paradigm shift toward more sustainable, safer, and smarter transportation. In this context, automation systems, which are becoming highly multidisciplinary, require an ever-increasing combination of control, information, and electrical/electronic and mechanical disciplines. This further offers ample prospects for the design, control, optimization, and innovative integration of advanced automation systems. Emerging smart technologies, including artificial intelligence (AI), cybernetics, the Internet of Things (IoT), as well as high-performance computing and control, are changing how intelligent transportation systems (ITS) interact with the society. Thus, future intelligent transportation requires novel technologies and approaches to automation systems to further improve its safety, sustainability, and smartness. The objective of this Special Issue is to compile recent research and development efforts contributing to advances in ITS automation. The Special Issue will also welcome contributions addressing state-of-the-art advances in associated developments and methodologies and perspectives on future developments and applications.
Dr. Chen Lv
Collection Editor
Manuscript Submission Information
Manuscripts should be submitted online at www.mdpi.com by registering and logging in to this website. Once you are registered, click here to go to the submission form. Manuscripts can be submitted until the deadline. All submissions that pass pre-check are peer-reviewed. Accepted papers will be published continuously in the journal (as soon as accepted) and will be listed together on the collection website. Research articles, review articles as well as short communications are invited. For planned papers, a title and short abstract (about 100 words) can be sent to the Editorial Office for announcement on this website.
Submitted manuscripts should not have been published previously, nor be under consideration for publication elsewhere (except conference proceedings papers). All manuscripts are thoroughly refereed through a single-blind peer-review process. A guide for authors and other relevant information for submission of manuscripts is available on the Instructions for Authors page. Automation is an international peer-reviewed open access quarterly journal published by MDPI.
Please visit the Instructions for Authors page before submitting a manuscript.
The Article Processing Charge (APC) for publication in this open access journal is 1000 CHF (Swiss Francs).
Submitted papers should be well formatted and use good English. Authors may use MDPI's
English editing service prior to publication or during author revisions.
Keywords
- Advanced automation systems
- Intelligent transportation systems
- Future mobility solutions
- Artificial intelligence (AI) and the Internet of Things (IoT) for intelligent transportation systems (ITS)
- Automation design for ITS
- Control and optimization in ITS
- Cyber-physical systems in ITS
- Human-automation systems in ITS
Published Papers (3 papers)
Open AccessArticle
Development and Performance Measurement of an Affordable Unmanned Surface Vehicle (USV)
by
Joga Dharma Setiawan, Muhammad Aldi Septiawan, Mochammad Ariyanto, Wahyu Caesarendra, M. Munadi, Sabri Alimi and Maciej Sulowicz
Cited by 6 | Viewed by 3668
Abstract
Indonesia is a maritime country that has vast coastal resources and biodiversity. To support the Indonesian maritime program, a topography mapping tool is needed. The ideal topography mapping tool is the Unmanned Surface Vehicle (USV). This paper proposes the design, manufacture, and development
[...] Read more.
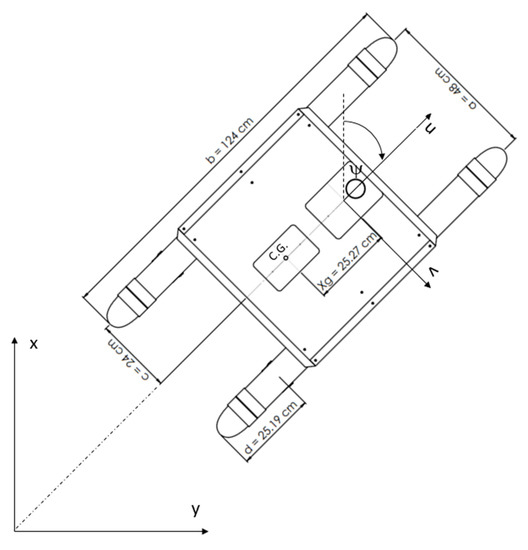
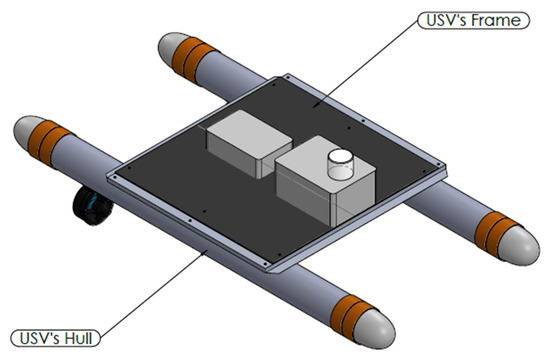
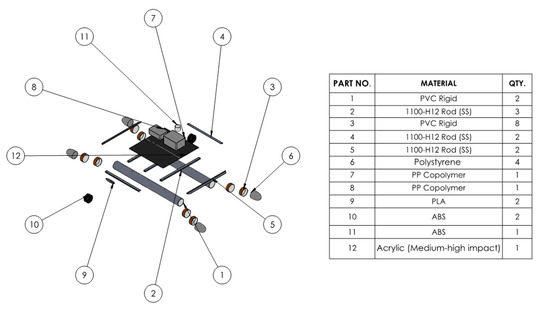
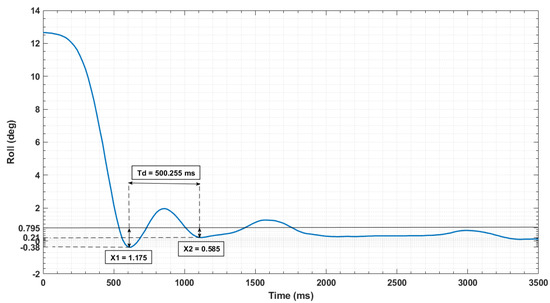
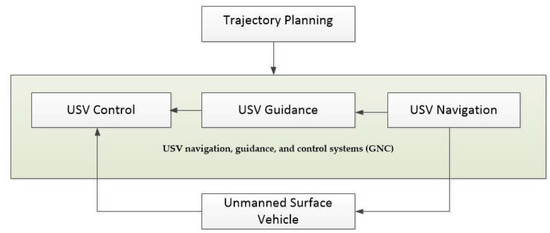
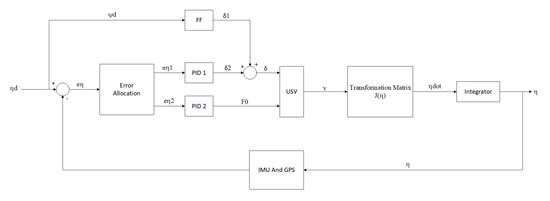
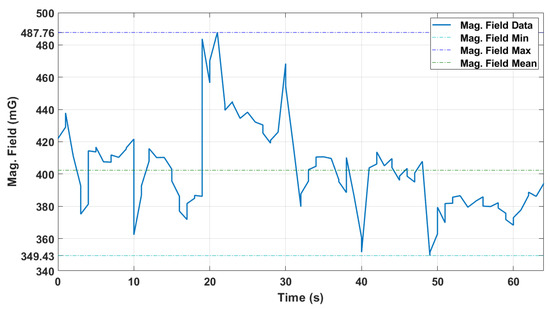
Indonesia is a maritime country that has vast coastal resources and biodiversity. To support the Indonesian maritime program, a topography mapping tool is needed. The ideal topography mapping tool is the Unmanned Surface Vehicle (USV). This paper proposes the design, manufacture, and development of an affordable autonomous USV. The USV which is composed of thruster and rudder is quite complicated to build. This study employs rudderless and double thrusters as the main actuators. PID compensator is utilized as the feedback control for the autonomous USV. Energy consumption is measured when the USV is in autonomous mode. The Dynamics model of USV was implemented to study the roll stability of the proposed USV. Open-source Mission Planner software was selected as the Ground Control Station (GCS) software. Performance tests were carried out by providing the USV with an autonomous mission to follow a specific trajectory. The results showed that the developed USV was able to complete autonomous mission with relatively small errors, making it suitable for underwater topography mapping.
Full article
►▼
Show Figures
Open AccessArticle
State Machine Approach for Lane Changing Driving Behavior Recognition
by
Ruth David, Sandra Rothe and Dirk Söffker
Cited by 4 | Viewed by 4591
Abstract
Research in understanding human behavior is a growing field within the development of Advanced Driving Assistance Systems (ADASs). In this contribution, a state machine approach is proposed to develop a driving behavior recognition model. The state machine approach is a behavior model based
[...] Read more.
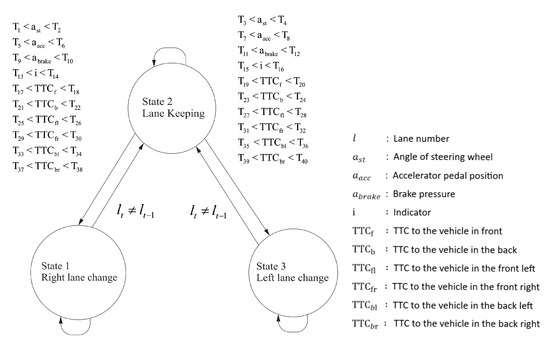
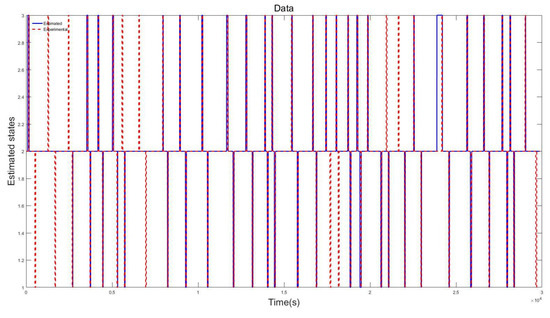
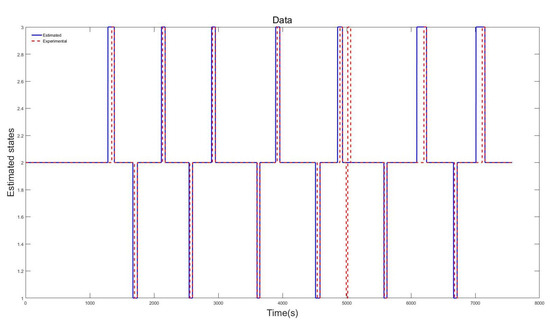
Research in understanding human behavior is a growing field within the development of Advanced Driving Assistance Systems (ADASs). In this contribution, a state machine approach is proposed to develop a driving behavior recognition model. The state machine approach is a behavior model based on the current state and a given set of inputs. Transitions to different states occur or we remain in the same state producing outputs. The transition between states depends on a set of environmental and driving variables. Based on a heuristic understanding of driving situations modeled as states, as well as one of the related actions modeling the state, using an assumed relation between them as the state machine topology, in this paper, a crisp approach is applied to adapt the model to real behaviors. An important aspect of the contribution is to introduce a trainable state machine-based model to describe drivers’ lane changing behavior. Three driving maneuvers are defined as states. The training of the model is related to the definition/tuning of transition variables (and state definitions). Here, driving data are used as the input for training. The non-dominated sorting genetic algorithm II is used to generate the optimized transition threshold. Comparing the data of actual human driving behaviors collected using driving simulator experiments and the calculated driving behaviors, this approach is able to develop a personalized behavior recognition model. The newly established algorithm presents an easy to apply, reliable, and interpretable AI approach.
Full article
►▼
Show Figures
Open AccessCommunication
A Connected Autonomous Vehicle Testbed: Capabilities, Experimental Processes and Lessons Learned
by
Thomas Kent, Anthony Pipe, Arthur Richards, Jim Hutchinson and Wolfgang Schuster
Cited by 6 | Viewed by 5917
Abstract
VENTURER was one of the first three UK government funded research and innovation projects on Connected Autonomous Vehicles (CAVs) and was conducted predominantly in the South West region of the country. A series of increasingly complex scenarios conducted in an urban setting were
[...] Read more.
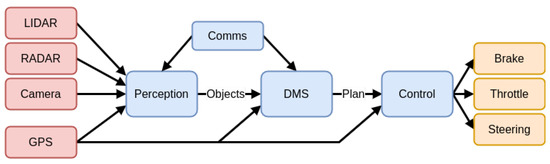
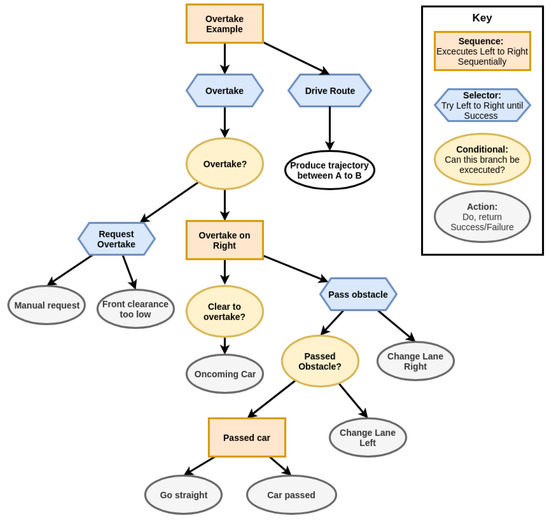
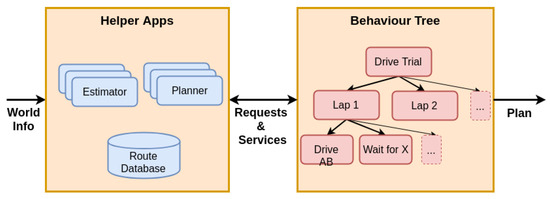
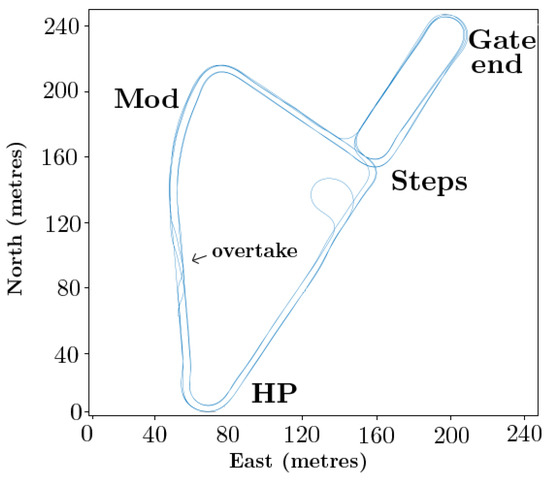
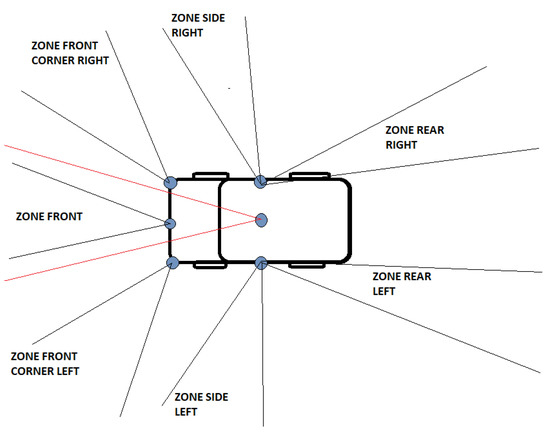
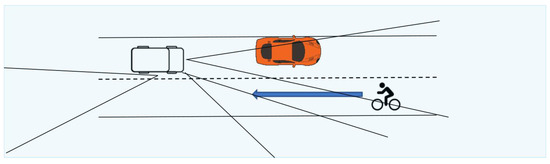
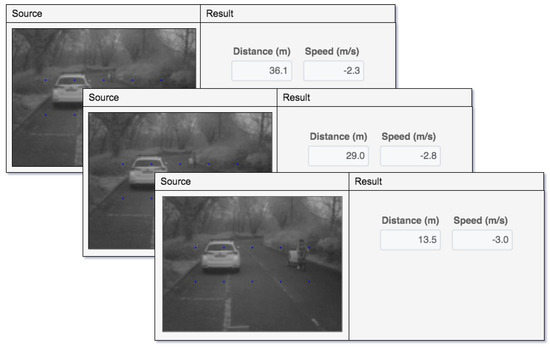
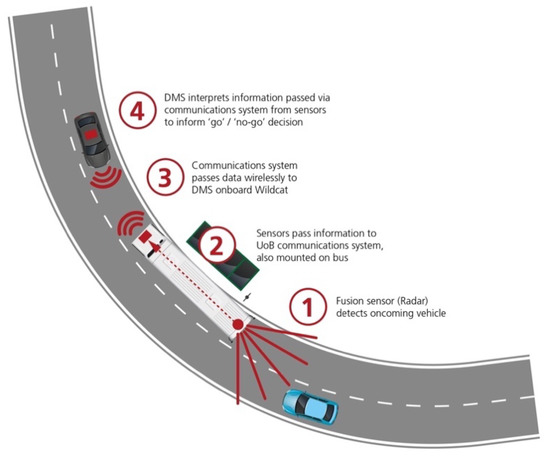
VENTURER was one of the first three UK government funded research and innovation projects on Connected Autonomous Vehicles (CAVs) and was conducted predominantly in the South West region of the country. A series of increasingly complex scenarios conducted in an urban setting were used to: (i) evaluate the technology created as a part of the project; (ii) systematically assess participant responses to CAVs and; (iii) inform the development of potential insurance models and legal frameworks. Developing this understanding contributed key steps towards facilitating the deployment of CAVs on UK roads. This paper aims to describe the VENTURER Project trials, their objectives and detail some of the key technologies used. Importantly we aim to introduce some informative challenges that were overcame and the subsequent project and technological lessons learned in a hope to help others plan and execute future CAV research. The project successfully integrated several technologies crucial to CAV development. These included, a Decision Making System using behaviour trees to make high level decisions; A pilot-control system to smoothly and comfortably turn plans into throttle and steering actuation; Sensing and perception systems to make sense of raw sensor data; Inter-CAV Wireless communication capable of demonstrating vehicle-to-vehicle communication of potential hazards. The closely coupled technology integration, testing and participant-focused trial schedule led to a greatly improved understanding of the engineering and societal barriers that CAV development faces. From a behavioural standpoint the importance of reliability and repeatability far outweighs a need for novel trajectories, while the sensor-to-perception capabilities are critical, the process of verification and validation is extremely time consuming. Additionally, the added capabilities that can be leveraged from inter-CAV communications shows the potential for improved road safety that could result. Importantly, to effectively conduct human factors experiments in the CAV sector under consistent and repeatable conditions, one needs to define a scripted and stable set of scenarios that uses reliable equipment and a controllable environmental setting. This requirement can often be at odds with making significant technology developments, and if both are part of a project’s goals then they may need to be separated from each other.
Full article
►▼
Show Figures



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}