
A Curvelet-Transform-Based Image Fusion Method Incorporating Side-Scan Sonar Image Features
Abstract
:1. Introduction
2. Process of the Curvelet-Transform-Based Side-Scan Sonar Image Fusion Algorithm
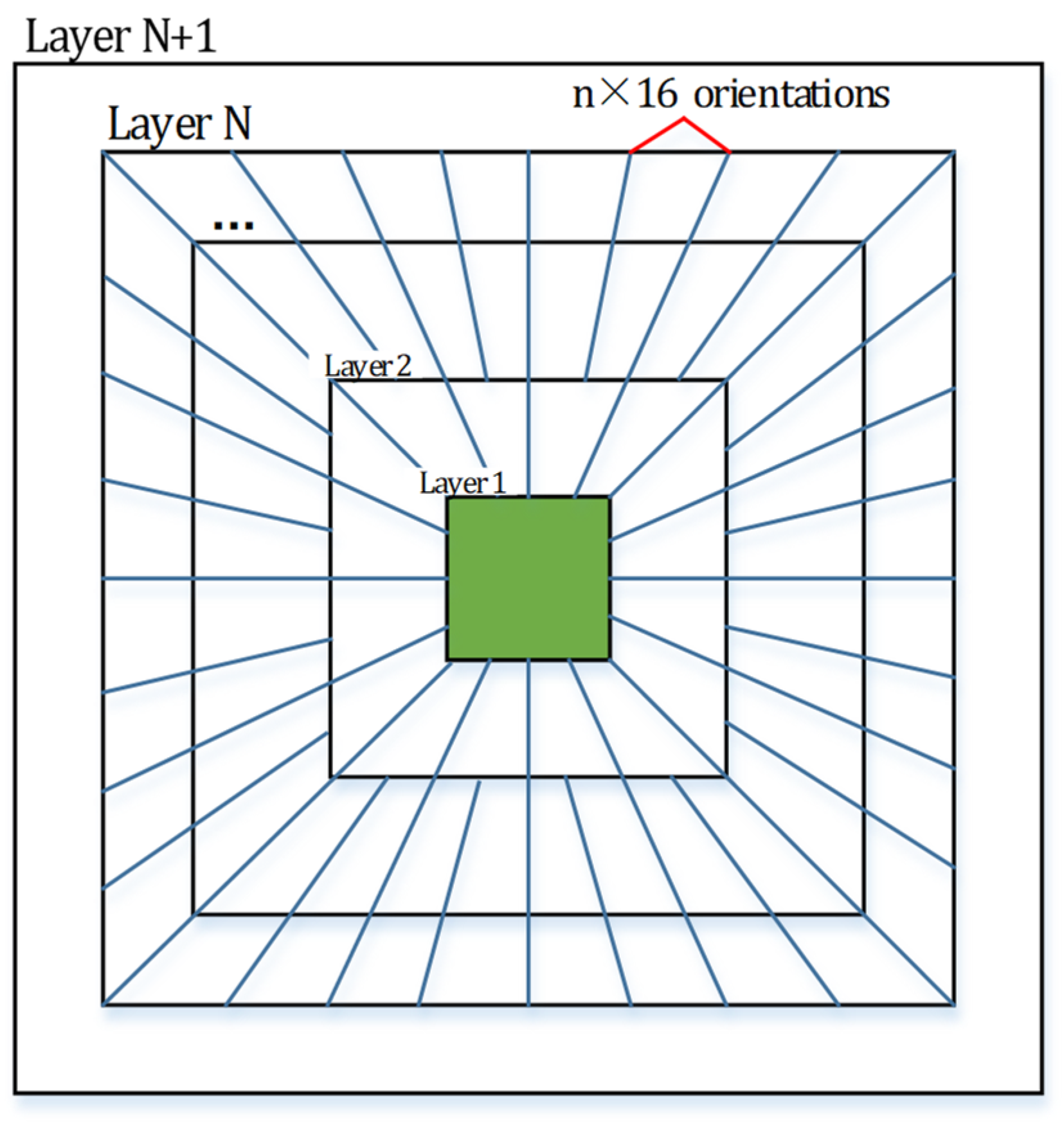
2.1. Curvelet-Transform-Based Algorithm
2.2. Fusion Process
3. Rules for Fusion of Curvelet Coefficients
3.1. Fusion Rules at the Coarse Layer
3.2. Fusion Rules at the Detail Layers
3.3. Fusion Rules at the Fine Layer
4. Evaluation Indicators
- (1)
- Information entropy:
- (2)
- Normalized mutual information:
- (3)
- Average gradient:
- (4)
- Spatial frequency:
- (5)
- Standard deviation:
5. Experiments and Analyses
5.1. Testing on the Side-Scan Sonar Image with Low Noise and Large Shadow Areas
5.2. Testing on the Side-Scan Sonar Image with Strong Noise and Small Shadow Areas
6. Discussion
7. Conclusions
- (1)
- Combines fusion rules based on the regional matching and activity degrees of imagery, which preserves the valid details of side-scan sonar images while eliminating those that are irrelevant;
- (2)
- Incorporates fusion rules centering on the average gray-level gradient of imagery as a way of enhancing the clarity and contrast of side-scan sonar images;
- (3)
- Merges fusion rules involving curvelet coefficients and extreme values, thereby reducing the impact of strip image shadows on the fused results.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shahid, K.; Tong, G.; Li, J.Y.; Akeel, Q.; Umar, F.; Yu, Y.T. Current advances and future perspectives of image fusion: A comprehensive review. Inf. Fusion 2023, 90, 185–217. [Google Scholar]
- Wang, X. Research on Precise Processing of Side-Scan Sonar Images and Object Recognition Methods. Ph.D. Thesis, Wuhan University, Wuhan, China, 2017; pp. 49–53. [Google Scholar]
- Wu, M. Research on Mosaic Methods for Side-Scan Sonar Images. Master’s Thesis, East China University of Science and Technology, Shanghai, China, 2018; pp. 54–55. [Google Scholar]
- Xu, J. Research on Key Mosaic and Segmentation Techniques for Side-Scan Sonar Images. Master’s Thesis, East China University of Science and Technology, Shanghai, China, 2017; pp. 51–58. [Google Scholar]
- Deng, Y.Y. Research on the Mosaic System of Side-Scan Sonar Images. Master’s Thesis, Harbin Engineering University, Harbin, China, 2013; pp. 52–53. [Google Scholar]
- Cao, M.; Guo, J. A mosaic method based on corresponding features for side-scan sonar images. Geomat. Spat. Inf. Technol. 2014, 37, 48–51. [Google Scholar]
- Dong, L.L. Research on Hierarchical Iterative Image Fusion Algorithm Based on Feature Image Gradient. Master’s Thesis, Guangxi Minzu University, Nanning, China, 2021; pp. 1–35. [Google Scholar]
- Zhang, J.B.; Pan, G.F. Study on side-scan sonar image mosaic based on wavelet transform. Prog. Geophys. 2010, 25, 2221–2226. [Google Scholar]
- Ge, X.K. Research on the Mosaic Methods for Side-Scan Sonar Images. Master’s Thesis, Harbin Engineering University, Harbin, China, 2020; pp. 28–29. [Google Scholar]
- Zhao, J.H.; Wang, A.X.; Zhang, H.M.; Wang, X. Mosaic method of side-scan sonar strip images using corresponding features. IET Image Process. 2013, 7, 616–623. [Google Scholar] [CrossRef]
- He, F.L.; Wu, M.; Long, R.J.; Chen, Z.G. Accurate mosaic of side-scan sonar images based on SURF features. J. Ocean. Technol. 2020, 39, 35–38. [Google Scholar]
- Zhao, M.H.; You, Z.S.; Zhao, Y.G.; Lv, X.B.; Yu, J. An image fusion algorithm based on wavelet transform. In Proceedings of the 1994–2022 China Academic Journal Electronic Publishing House, Chengdu, China, 27 December 2022; pp. 108–111. [Google Scholar]
- Liu, Z.H.; Gao, J.M.; Cui, T.H. Novel image fusion algorithm based on wavelet transform. Comput. Eng. Appl. 2007, 43, 74–76. [Google Scholar]
- Chao, R.; Zhang, K.; Li, Y.J. An image fusion algorithm using wavelet transform. Acta Electron. Sin. 2004, 32, 750–753. [Google Scholar]
- Huang, X.D. A new image fusion method based on Laplacian pyramid in wavelet field. Electron. Sci. Technol. 2014, 27, 170–173. [Google Scholar]
- Wu, Z.G.; Wang, Y.J. Image fusion algorithm using curvelet transform based on edge detection. Opt. Tech. 2009, 35, 682–690. [Google Scholar]
- Zhang, N.; Jin, S.H.; Bian, G.; Cui, Y.; Chi, L. A mosaic method for side-scan sonar strip images based on curvelet transform and resolution constraints. Sensors 2021, 21, 6044. [Google Scholar] [CrossRef]
- Zhang, J.X.; Niu, W.B.; Zhang, K.W. Improved image fusion algorithm based on wavelet transform. J. Chongqing Inst. Technol. Nat. Sci. Ed. 2012, 26, 61–65. [Google Scholar]
- Zhang, J.X.; Xie, T.T. A new fusion algorithm based on local gradient. J. Chongqing Inst. Technol. Nat. Sci. Ed. 2012, 26, 51–55. [Google Scholar]
- Guo, J.; Ma, G.Y.; Ma, J.F.; Wang, A.X.; Yi, F.; Feng, Q.Q. A digital mosaic method for side-scan sonar images. Eng. Surv. Mapp. 2017, 26, 34–39. [Google Scholar]
- Hou, X.; Zhou, X.H.; Tang, Q.H.; Wang, C.Y. Algorithm for auto-splicing the sonar images based on MATLAB. Coast. Eng. 2014, 33, 51–55. [Google Scholar]
- Zhou, D.N. Research on Mosaic Methods for Side-Scan Sonar Images. Master’s Thesis, Jiangsu University of Science and Technology, Zhenjiang, China, 2019; pp. 51–52. [Google Scholar]
- Zhou, P.; Chen, G.; Wang, M.W.; Liu, X.L.; Chen, S.; Sun, R. Side-Scan Sonar Image Fusion Based on Sum-Modified Laplacian Energy Filtering and Improved Dual-Channel Impulse Neural Network. Appl. Sci. 2020, 10, 1028–1046. [Google Scholar] [CrossRef] [Green Version]
- He, J.; Chen, J.F.; Xu, H.; Ayub, M.S. Small Target Detection Method Based on Low-Rank Sparse Matrix Factorization for Side-Scan Sonar Images. Remote Sens. 2023, 15, 2054–2074. [Google Scholar] [CrossRef]
- Yang, D.Y.; Wang, C.; Cheng, C.S.; Pan, G.; Zhang, F. Semantic Segmentation of Side-Scan Sonar Images with Few Samples. Electronics 2022, 11, 3002–3016. [Google Scholar] [CrossRef]
- Tang, Y.L.; Wang, L.M.; Jin, S.H.; Zhao, J.H.; Huang, C.; Yu, Y.C. AUV-Based Side-Scan Sonar Real-Time Method for Underwater-Target Detection. J. Mar. Sci. Eng. 2023, 11, 690–718. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer | Scale Coefficient | Number of Orientations | Matrix Form |
|---|---|---|---|
| Coarse | 1 | A set of matrices | |
| Detail | 16 | 16 sets of matrices | |
| … | … | … | |
| (with n irrelevant to N) | sets of matrices | ||
| Fine | 1 | A set of matrices of size |
| Layer | Scale Coefficient | Number of Orientations | Matrix Form |
|---|---|---|---|
| Coarse | 1 | 37 15 | |
| Detail | 16 | 30 16 (4 sets) 27 14 (4 sets) 37 13 (4 sets) 37 11 (4 sets) | |
| 32 | 58 16 (4 sets) 55 15 (8 sets) 55 16 (4 sets) 37 24 (4 sets) 38 22 (8 sets) 37 22 (4 sets) | ||
| 32 | 115 30 (4 sets) 110 30 (12 sets) 74 46 (4 sets) 74 44 (12 sets) | ||
| Fine | 1 | 439 175 |
| Normalized Mutual Information | Information Entropy | Average Gradient | Spatial Frequency | Standard Deviation of Gray Level of Image | ||
|---|---|---|---|---|---|---|
| Proposed Method | 0.1433 | 7.6675 | 14.3056 | 37.6845 | 54.4358 | |
| Curvelet-Transform-Based Fusion Method Incorporating the Extremum and the Fade-In and Fade-Out Weighted Averaging Rule | 0.0954 | 6.7515 | 11.9239 | 36.6779 | 38.5593 | |
| Fusion Method Based on the Wavelet Transform | 0.1033 | 7.3513 | 13.6859 | 37.1228 | 41.2944 | |
| Laplacian Pyramid Fusion Method | Three Decomposed Layers | 0.1205 | 7.5844 | 13.6903 | 37.1458 | 49.5006 |
| Four Decomposed Layers | 0.1047 | 7.5831 | 13.5391 | 37.0545 | 48.4813 | |
| Five Decomposed Layers | 0.0881 | 7.4808 | 12.7595 | 33.1743 | 50.3156 | |
| Gray-Level-Based Fade-In and Fade-Out Weighted Averaging Fusion Method | 0.0802 | 7.1200 | 8.4047 | 22.8736 | 34.8301 | |
| Normalized Mutual Information | Information Entropy | Average Gradient | Spatial Frequency | Standard Deviation of Gray Level of Image | ||
|---|---|---|---|---|---|---|
| Proposed Method | 0.2253 | 7.8747 | 17.5501 | 45.9045 | 66.0877 | |
| Curvelet-Transform-Based Fusion Method Incorporating the Extremum and the Fade-In and Fade-Out Weighted Averaging Rule | 0.1315 | 6.7791 | 13.0497 | 40.1973 | 55.4402 | |
| Fusion Method Based on the Wavelet Transform | 0.1580 | 7.6189 | 17.1930 | 45.6154 | 56.5425 | |
| Laplacian Pyramid Fusion Method | Three Decomposed Layers | 0.2076 | 7.7646 | 16.8575 | 44.0948 | 62.6314 |
| Four Decomposed Layers | 0.1584 | 7.8249 | 17.2029 | 45.5797 | 65.4208 | |
| Five Decomposed Layers | 0.1463 | 7.7782 | 17.0879 | 45.4595 | 63.5135 | |
| Gray-Level-Based Fade-In and Fade-Out Weighted Averaging Fusion Method | 0.0552 | 7.3745 | 10.3284 | 29.2600 | 48.9517 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, X.; Jin, S.; Bian, G.; Cui, Y.; Wang, J.; Zhou, B. A Curvelet-Transform-Based Image Fusion Method Incorporating Side-Scan Sonar Image Features. J. Mar. Sci. Eng. 2023, 11, 1291. https://doi.org/10.3390/jmse11071291
Zhao X, Jin S, Bian G, Cui Y, Wang J, Zhou B. A Curvelet-Transform-Based Image Fusion Method Incorporating Side-Scan Sonar Image Features. Journal of Marine Science and Engineering. 2023; 11(7):1291. https://doi.org/10.3390/jmse11071291
Chicago/Turabian StyleZhao, Xinyang, Shaohua Jin, Gang Bian, Yang Cui, Junsen Wang, and Bo Zhou. 2023. "A Curvelet-Transform-Based Image Fusion Method Incorporating Side-Scan Sonar Image Features" Journal of Marine Science and Engineering 11, no. 7: 1291. https://doi.org/10.3390/jmse11071291