1. Introduction
In recent years, with the rapid development of artificial intelligence [
1], machine learning [
2], cloud computing [
3] and other technical fields, photogrammetry has become more and more widely used in engineering [
4]. Engineering problems are usually more complex than theoretical problems, and more factors are considered. The traditional point-based photogrammetric method is not enough to solve engineering problems; therefore, the generalized photogrammetric method based on line features is proposed [
5]. Generalized photogrammetry originated in the 19th century. After decades of development in theoretical research, it has gradually developed from the classic point-based photogrammetry model to point-line hybrid photogrammetry and generalized point photogrammetry. With the development of big data and the arrival of intelligent photogrammetry, photogrammetry can use more homonymous features to complete the measurement calculation. Intelligent high-precision measurement is urgently needed in engineering. This measurement method not only improves the work efficiency and the safety of measurement, but also greatly reduces the measurement cost. With the performance improvement of computers, sensors, transmission equipment and other hardware [
6], a large number of traditional measurement methods [
7] will be replaced by intelligent high-precision photogrammetry. Intelligent photogrammetry has many applications in target recognition [
8], monitoring [
9], unmanned driving [
10], three-dimensional modeling [
11], precision measurement [
12], emergency response [
13] and other aspects.
Traditional photogrammetry involves only physical points, such as corners, intersections between lines, centers and so on. The calculation process of traditional photogrammetry is also based on the collinearity of points. However, in engineering, point features [
14] are usually ideal features, and it is not easy to extract accurate coordinates of points. There are a lot of line features in engineering [
15]. These features exist in the form of straight lines or curves, from which it is easy to extract accurate information. Especially when multiple images are used for calculation in engineering, it is better to use a large number of line features for adjustment. Line features can be divided into straight line features and curve features. There are many straight line features in urban planning and housing surveys [
16]. There are many curve features in roads, mountains and rivers [
17]. Mathematically, line features and point features can be considered as “points” in a broad sense. From the collinear equation in photogrammetry [
4], the coordinates of space points can be regarded as the parameter equation of the line, so that the line features meet the collinear equation. Zheng Shunyi of Wuhan University completed automatic three-dimensional reconstruction of cylinders using the principle of generalized photogrammetry [
18], Zhang Yongjun of Wuhan University completed three-dimensional reconstruction of circles and rounded rectangles using the principle of generalized photogrammetry [
19], and Kongwei used the principle of generalized photogrammetry to study space intersection and resection [
20]. In addition, Zhang Yongjun also proposed generalized photogrammetry based on multi-source remote sensing data of the sky and the ground [
21]. The application of general photogrammetry will be more and more extensive.
In recent years, prefabricated bridges have been rapidly promoted in China [
22]. At present, the construction site mainly relies on workers to use the total station to complete measurement in the whole process [
23]. As a widely used optical instrument, the precision of the total station can meet the construction requirements, but its efficiency is too low. For the on-site construction environment, the field of vision of the total station is too small to measure the coordinates of the points directly. Laser Radar determines the spatial information of targets by receiving reflected signals, but its accuracy cannot meet engineering requirements [
24,
25,
26,
27]. Laser scanning has high stability and is suitable for extremely large objects. The generated large point clouds require complex post-processing to complete the extraction of key information. Laser scanners are suitable for measuring static objects, but are not suitable for engineering projects that require real-time performance, as they have low efficiency and high cost [
28,
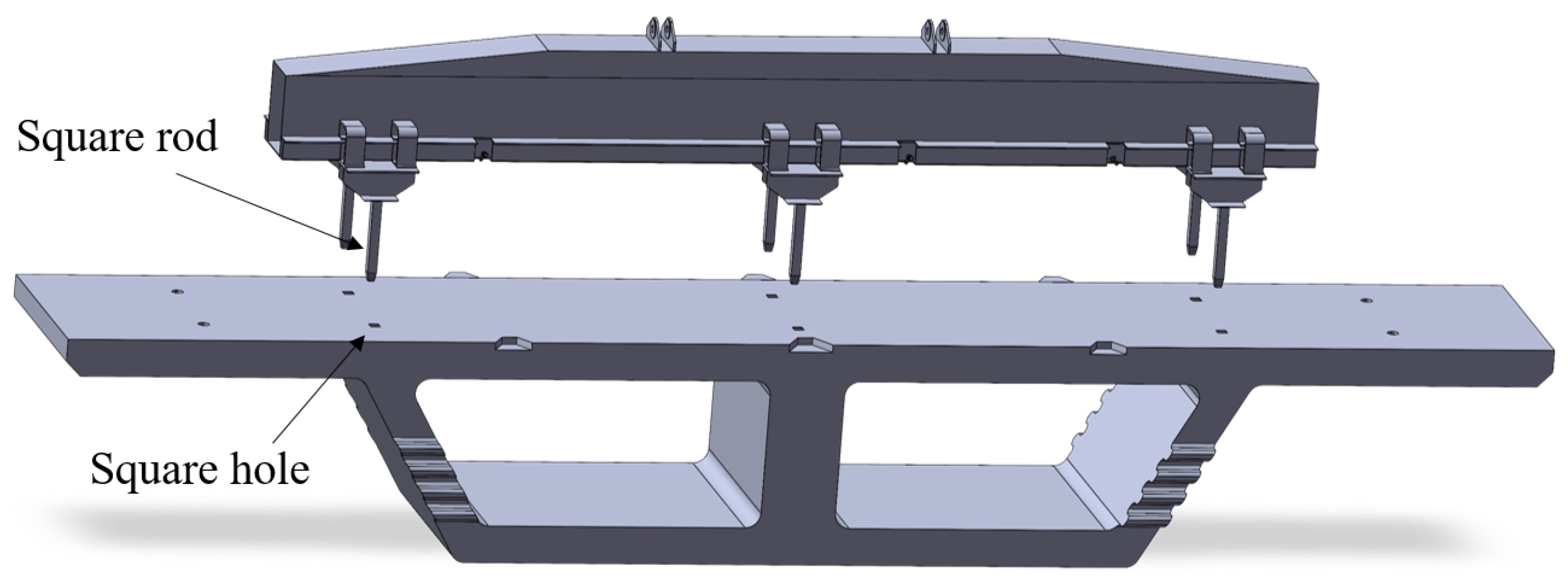
29]. Therefore, an efficient and fast measurement method is needed to complete the field measurement. In the process of completing the assembly of the segmental beam, it is necessary to lift the segmental beam with the square rod first. In this process, whether the square rod and the square hole can be accurately aligned is very important. As shown in
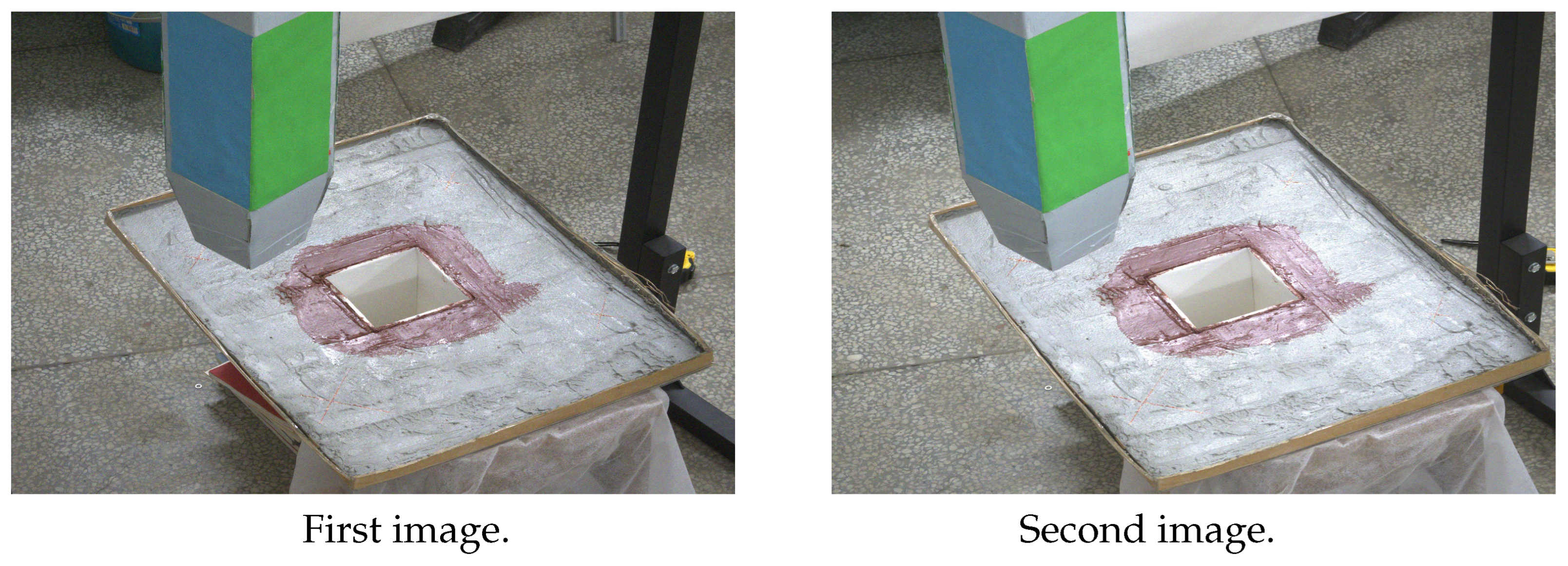
Figure 1, there are six square rods on the lifting tool. After achieving precise alignment of the holes and rods, the control system will insert the six suspension rods into the square holes, and then the lifting tool can lift the beam. The cross sections of the rod and the hole are both square. In order to ensure that the square rod can be placed in the square hole, the side length of the square hole is usually 10 mm longer than the side length of the square rod.
Before aligning the square hole and the square rods, the accurate position of the square hole and the square rod should be calculated to ensure that six square rods are placed in the six square hole simultaneously and then lifted. The above process requires high accuracy. The traditional alignment method mainly relies on manual operation, and the operator needs to manually adjust the position of the square rod to ensure accurate alignment between the hole and the rod. This manual adjustment method has low efficiency and poor safety. Traditional photogrammetry can calculate the space coordinates of key points, but the premise is that the image plane coordinates of the point can be accurately extracted from the image. In engineering environments, the features of points are usually not obvious, and the error in extracting the image plane coordinates of points is usually large. Compared to point features [
30,
31,
32], the extraction of line features [
33,
34,
35,
36] should be more stable. Therefore, this paper proposes an optimization method of square hole measurement based on generalized point photogrammetry.
The structure of this article is arranged as follows.
Section 2 introduces the mathematical principles of generalized point photogrammetry. On the basis of
Section 2,
Section 3 introduces the Lagrange multiplier method into general photogrammetry and provides detailed mathematical derivation. On the basis of
Section 3,
Section 4 has added geometric constraints for square holes and derived optimization methods. On the theoretical basis of the previous chapters, experiments are conducted in
Section 6. In order to better verify the robustness and engineering applicability of the algorithm, the experiments are divided into simulation experiments and engineering experiments. This article has the following innovative points. A generalized point photogrammetric mathematical model based on the Lagrange multiplier method is proposed. A square hole optimization method based on constraint conditions is proposed. This article combines image processing technology with photogrammetry technology and is used to solve practical engineering problems.
2. Mathematical Model of Generalized Point Photogrammetry
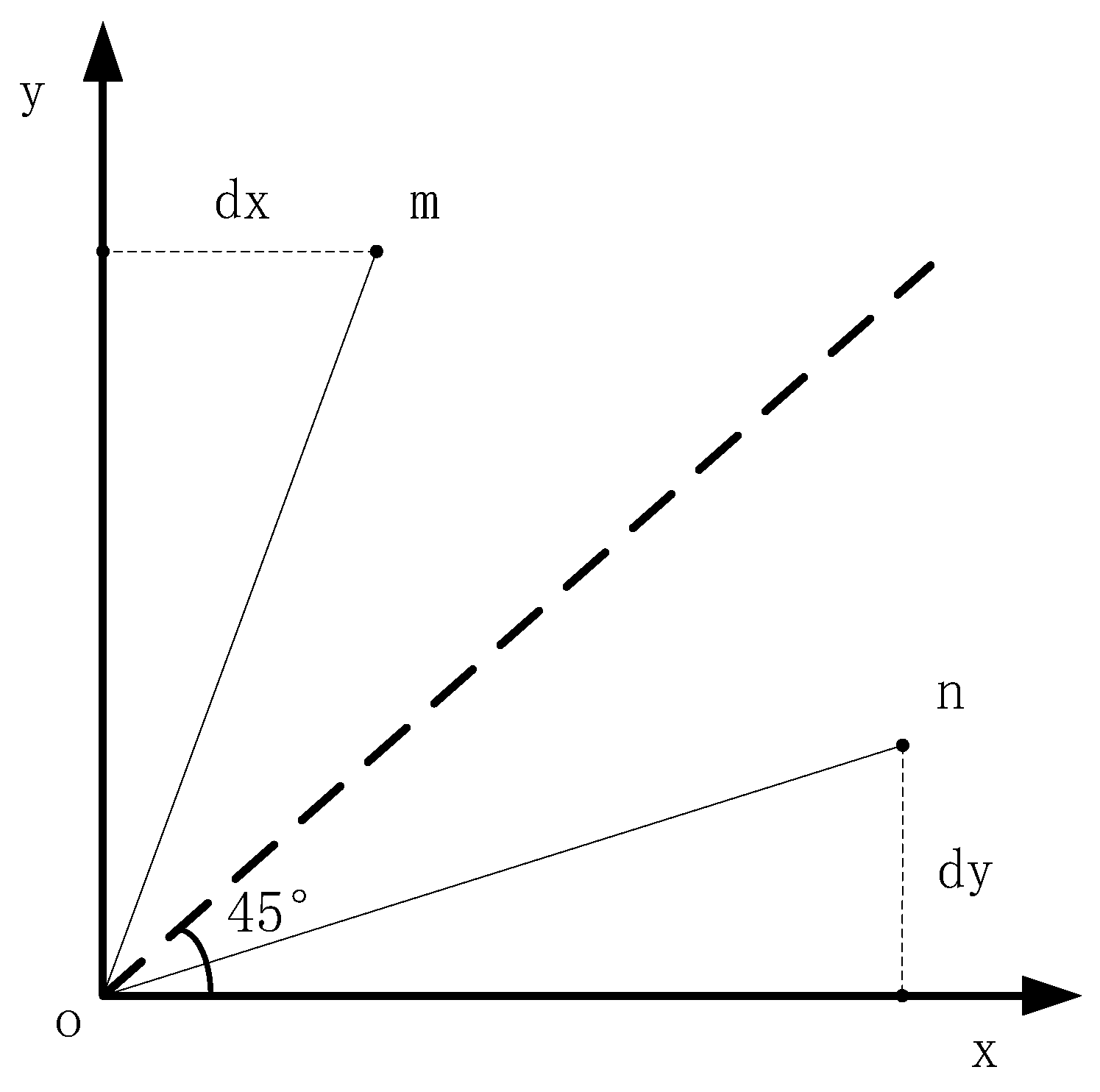
The collinearity equation is the core of photogrammetry, and the collinearity of points is the basis of photogrammetric solution. As shown in
Figure 2, point
m and point
n represent the projection point of the space point on the image. The angle between the straight line segment where point
m is located and the x-axis is greater than 45 degrees, and the angle between the straight line segment where point
n is located and the x-axis is less than 45 degrees. Point
m is closer to the y-axis, and point
n is closer to the x-axis.
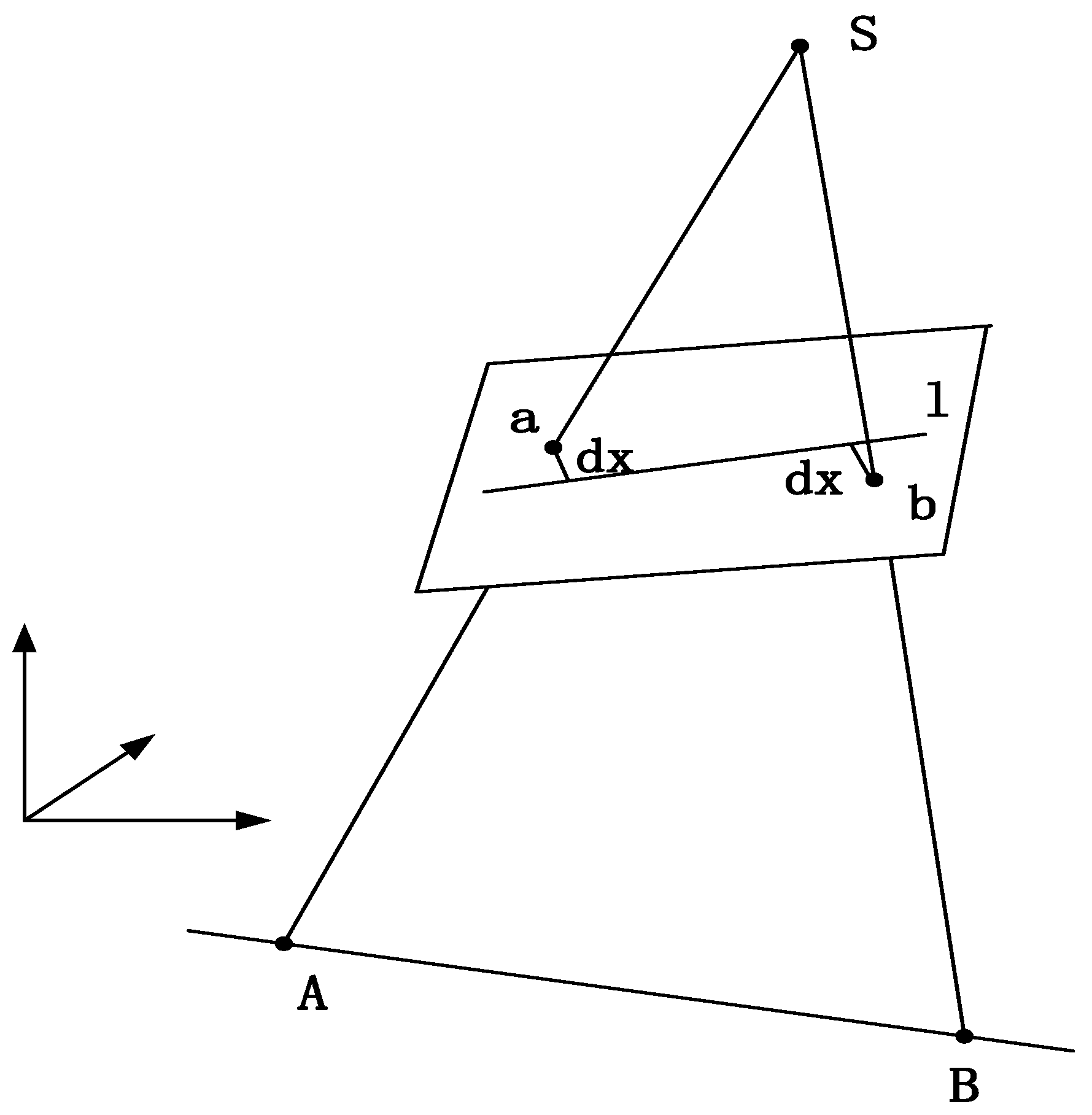
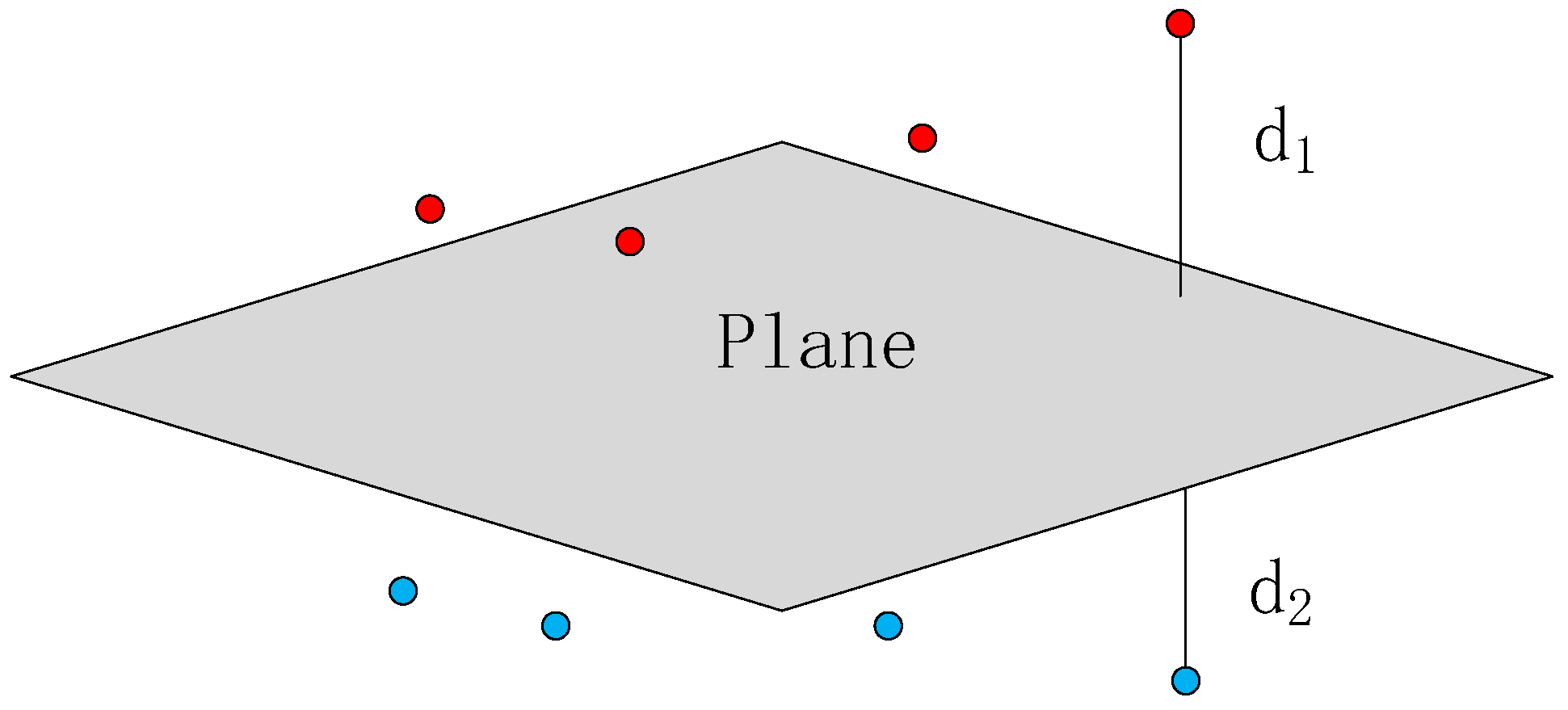
As shown in
Figure 3,
S is the projection center, and the projection of spatial points
A and
B on the image are
a and
b. The image coordinates of
a and
b are calculated through photogrammetry, and the line
l is the projection of the line
on the image. Due to errors,
a and
b are usually not on the straight line
l. The generalized point photogrammetric model based on straight lines only needs an error equation in one direction. The adjustment condition is that the distance dx (or dy) from the projection of the space point on the image to the ideal image point is the smallest.
When the angle between the direction of the straight line segment on the image and the x-axis is greater than 45 degrees, the observation equation in the x-direction is listed. When the angle between the direction of the straight line segment on the image and the y axis is less than 45 degrees, the observation equation in the y direction is listed. The mathematical expression of the observation equation is as follows.
where,
where,
x and
y are the image plane coordinates of the image point;
,
and
f are elements of interior orientation;
,
and
are the elements of exterior orientation;
X,
Y and
Z are the object space coordinates of the object point;
,
and
(
i = 1, 2, 3) are the directional cosines of three angular elements.
For line features in space, when two points (
,
,
), (
,
,
) on the line are known, the equation expression is as follows.
Substitute the above linear equation into collinear equation.
To solve each parameter in the linear equation by using the generalized point photogrammetry principle, the initial value of two points on the spatial linear equation must be known first. Assuming the coordinates of the observation points are (
,
), when the angle between the straight line and the x-axis direction is greater than 45 degrees, the observation equation in the x-direction is established. The value of parameter
t can be obtained from the collinear equation in the
y direction, and the expression is as follows.
On the premise of solving
t, the error equation of
x direction can be listed.
If the error equation is linearized, the following formula is obtained.
where, (
) is the approximate value of the result of the previous iteration. The calculation formulas of each coefficient are as follows.
where,
When the angle between the straight line and the x-axis direction is less than 45 degrees, the observation equation in the
y-direction is established. The value of parameter
t can be obtained from the collinear equation in the
x direction, and the expression is as follows.
On the premise of finding t, the error equation of y direction can be listed.
The following formula is used to linearize the error equation.
where, (y1) is the approximate value of the result of the previous iteration. The calculation formulas of each coefficient are as follows.
The accurate values of the coordinates of two points (, , ), (, , ) on the straight line can be obtained by solving the error equation iteratively.
3. Generalized Point Photogrammetry Based on Lagrange Multiplier Method
When using the principle of photogrammetry to calculate the coordinates of space points, there are usually redundant observations. When using multiple observations for adjustment, it is necessary to build an adjustment equation group [
37]. The error equation is shown below.
where,
V is the error,
V is also an explicit function of
X,
B is the coefficient matrix,
X is the correction of unknown number, and
l is the difference between the measured value and the observed value. The constraint equation is as follows.
where
C is coefficient matrix,
is a constant. From the above error Equation (
18) and constraint Equation (
19), the Lagrange multiplier method can be used to construct the following equation for solution.
The above Formula (
20) has the following formula for the derivative of
X.
After transposing the above Formula (
21), there is the following formula.
The following formula can be obtained by substituting Formula (
18) into Formula (
22).
The following formula can be obtained from the above formula.
where,
.
The following formula can be obtained by multiplying
left by Formula (
24). The following formula can be obtained by combining the above Formulas (
19) and (
24).
The following formula can be obtained from the above formula.
The following formula can be obtained by substituting the above formula into (
24).
where,
.
4. Mathematical Model of Square Hole Measurement Based on Constraint Conditions
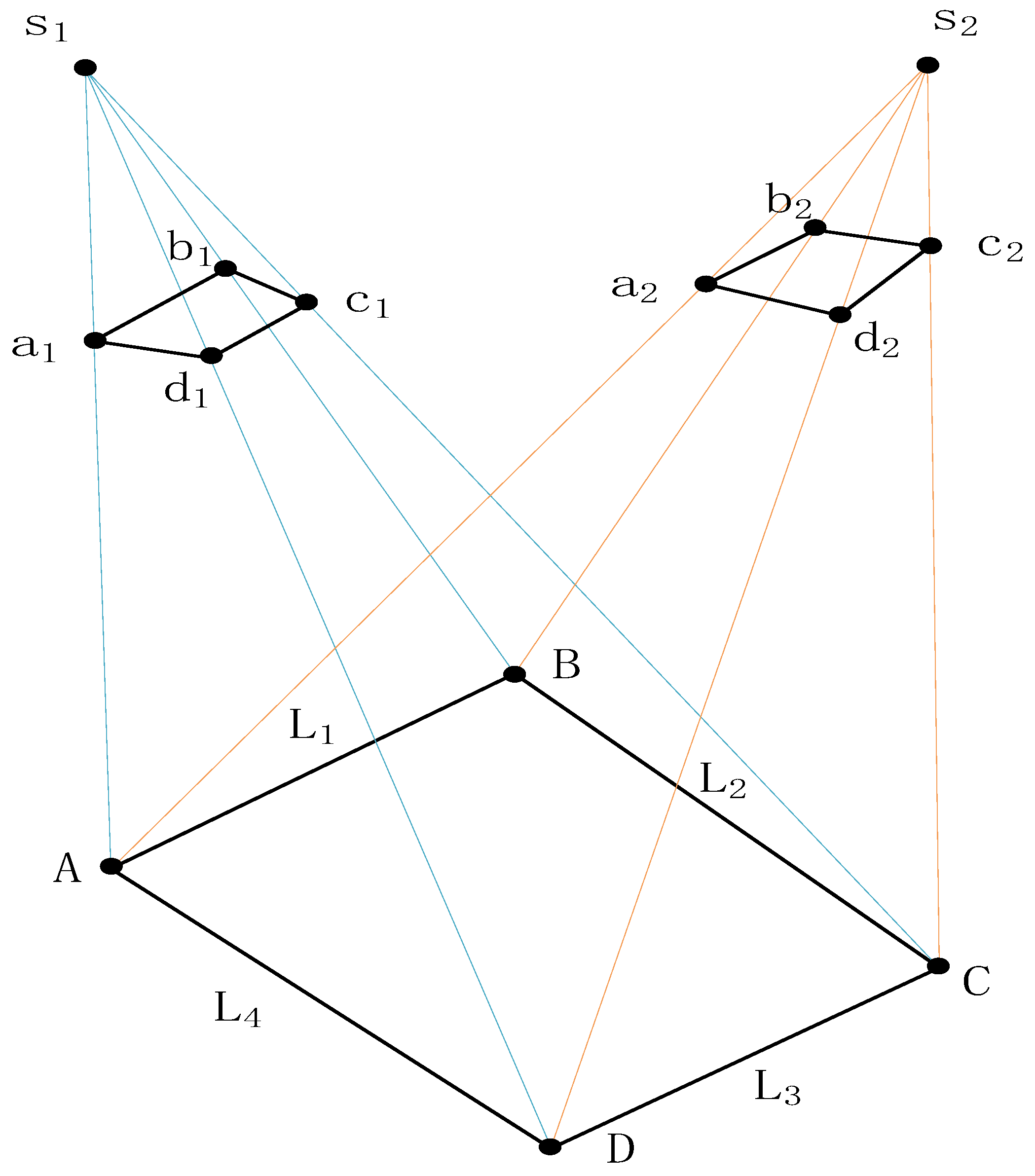
As shown in
Figure 4, it is a schematic diagram of a space square hole. Under ideal conditions, the four points
A,
B,
C and
D are in the same plane and form a plane square. The spatial coordinates of the four points are
,
,
and
. Line segment
is determined by point
A and
B, line segment
is determined by point
B and
C, line segment
is determined by point
C and
D, and line segment
is determined by point
A and
D.
and
are the projection centers of the two images. Points
,
,
and
are the projection of the spatial points
A,
B,
C and
D on the first image. Points
,
,
and
are the projection of the spatial points on the second image.
Since the four points form a plane square, the following constraints need to be set.
where,
m is the square side length.
The following formula can be obtained from the constraint conditions.
For the first constraint, the following equation can be obtained after the formula is functioned.
where,
In the same way, linearization formulas for other constraints can be obtained. After the error equations of all observation points are established, iterative calculation can be carried out to obtain the precise spatial coordinates of the four points of the square hole.
6. Conclusions
In order to solve the problem of accurate alignment of square rods with square holes in engineering, a measurement optimization method for square holes based on the basic theory of generalized photogrammetry is proposed in this article. This method takes the spatial coordinates of points calculated by traditional photogrammetric methods as the initial value, and takes the straight line segment extracted from the image as the measurement standard of projection error. This method combines the Lagrange multiplier method to construct the parametric equation of the straight line segment, and brings the parametric equation of the straight line segment into the collinear equation. By using the constraints of the square hole, the precise calculation of the square hole coordinates is completed through repeated iterations. Many sets of simulation experiments can converge to the exact value. In order to further verify the stability and practicality of the method, this article conducted engineering experiments on the established experimental platform, and compared the two methods from three aspects. The proposed methods achieved better experimental results. Therefore, the proposed method has certain engineering application value.
The simulation experiment in this article only used two images to complete the experiment. In the subsequent experimental process, it can be considered to simulate the experimental results of more images. The method proposed in this article is not only applicable to the square holes of segmental beam assembly, but also to other square holes. It can even be further improved to expand the application scope to more types of square holes. In future research, we will further integrate generalized photogrammetry theory into high-precision engineering surveying to meet the needs of engineering.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}