

Flux Weakening Controller Design for Series-Winding Three-Phase PMSM Drive Systems


Abstract
:1. Introduction
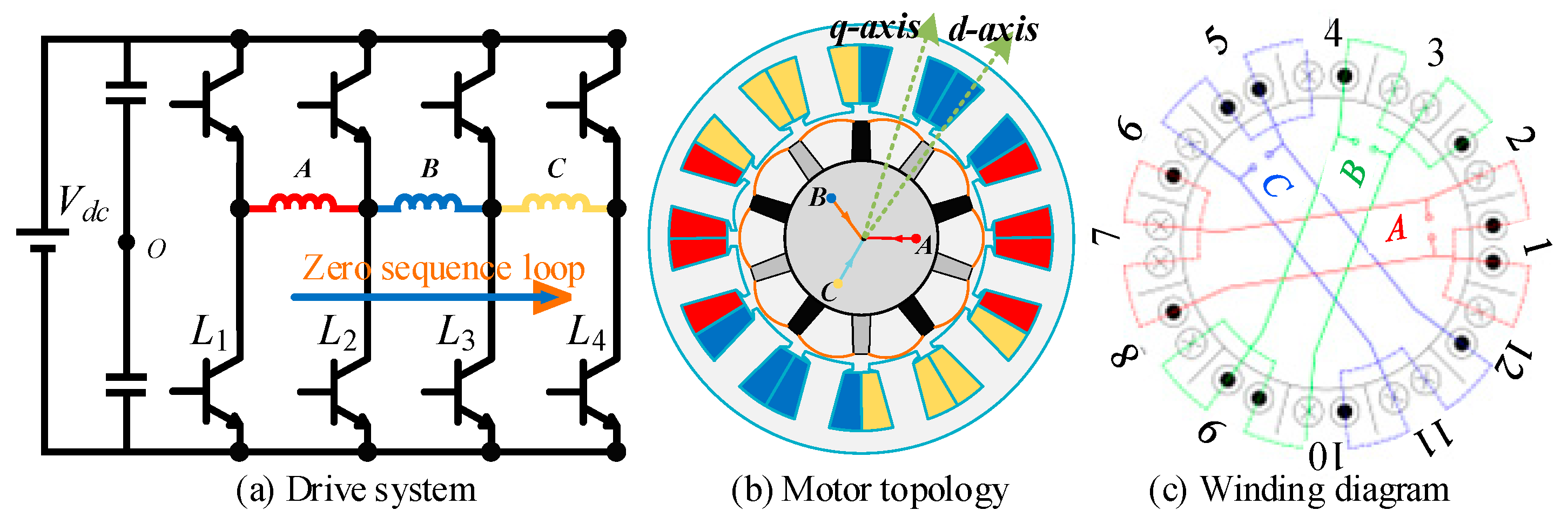
2. Topology of Series-Winding PMSM Drive System
3. Conventional Flux-Weakening Strategy
4. Proposed Improved Flux-Weakening Control Strategy
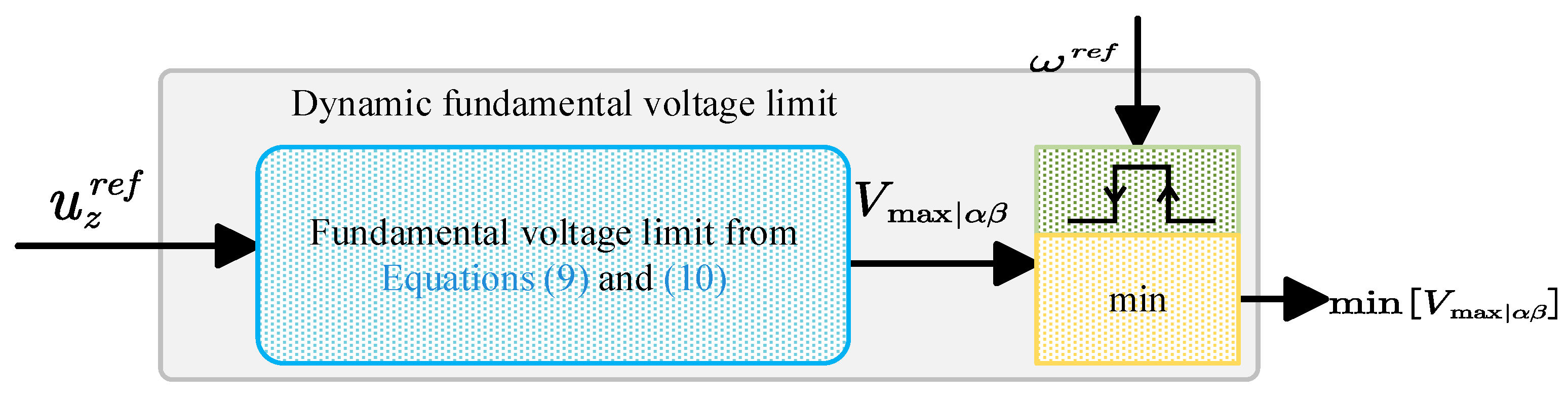
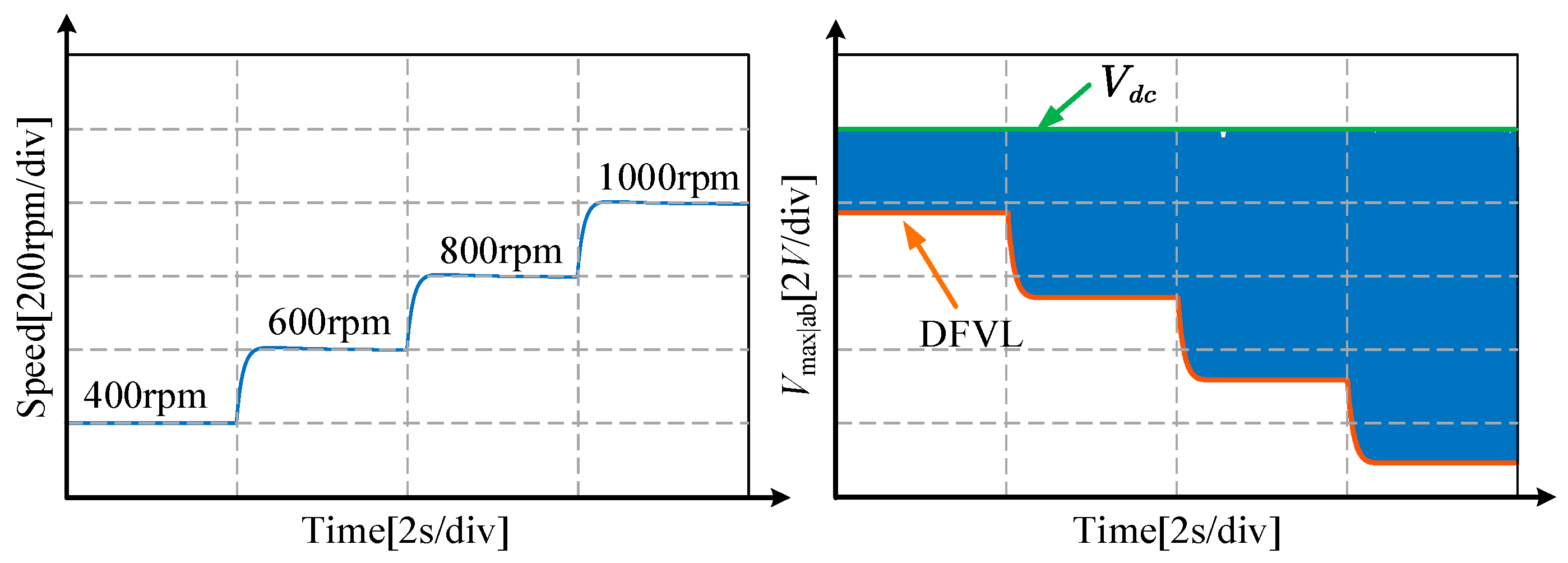
4.1. Dynamic Fundamental Voltage Limit
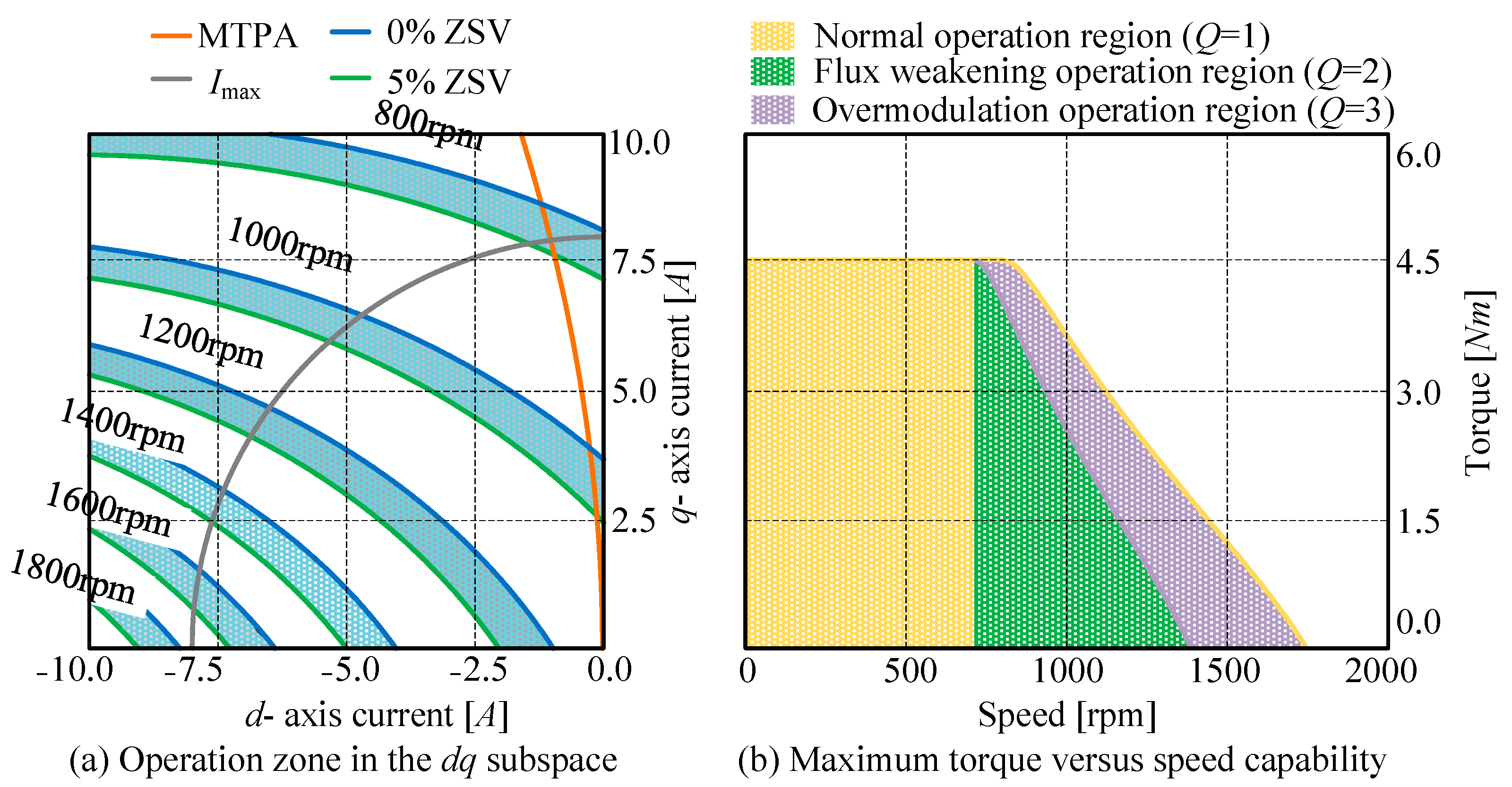
4.2. Flux-Weakening Current Generation
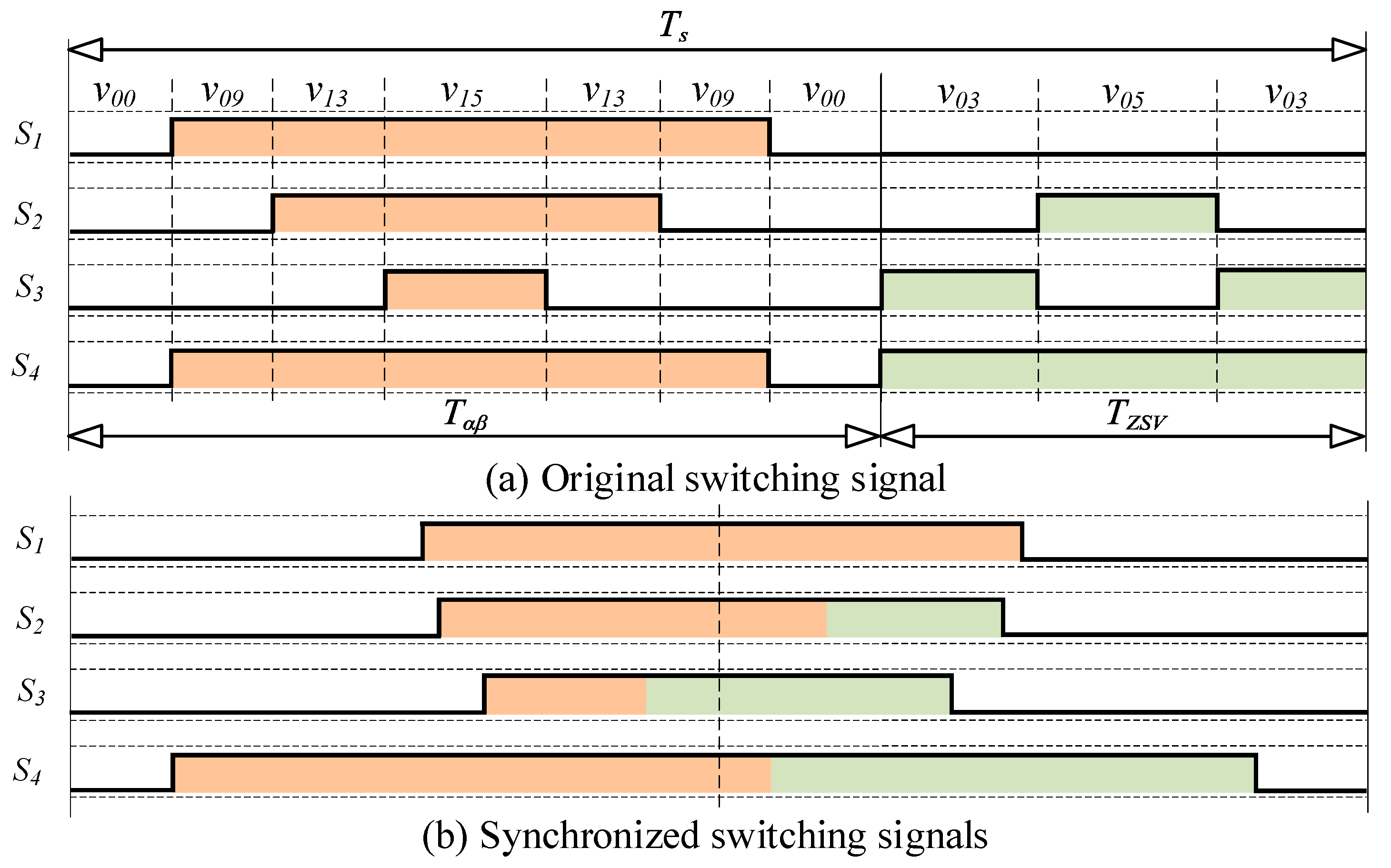
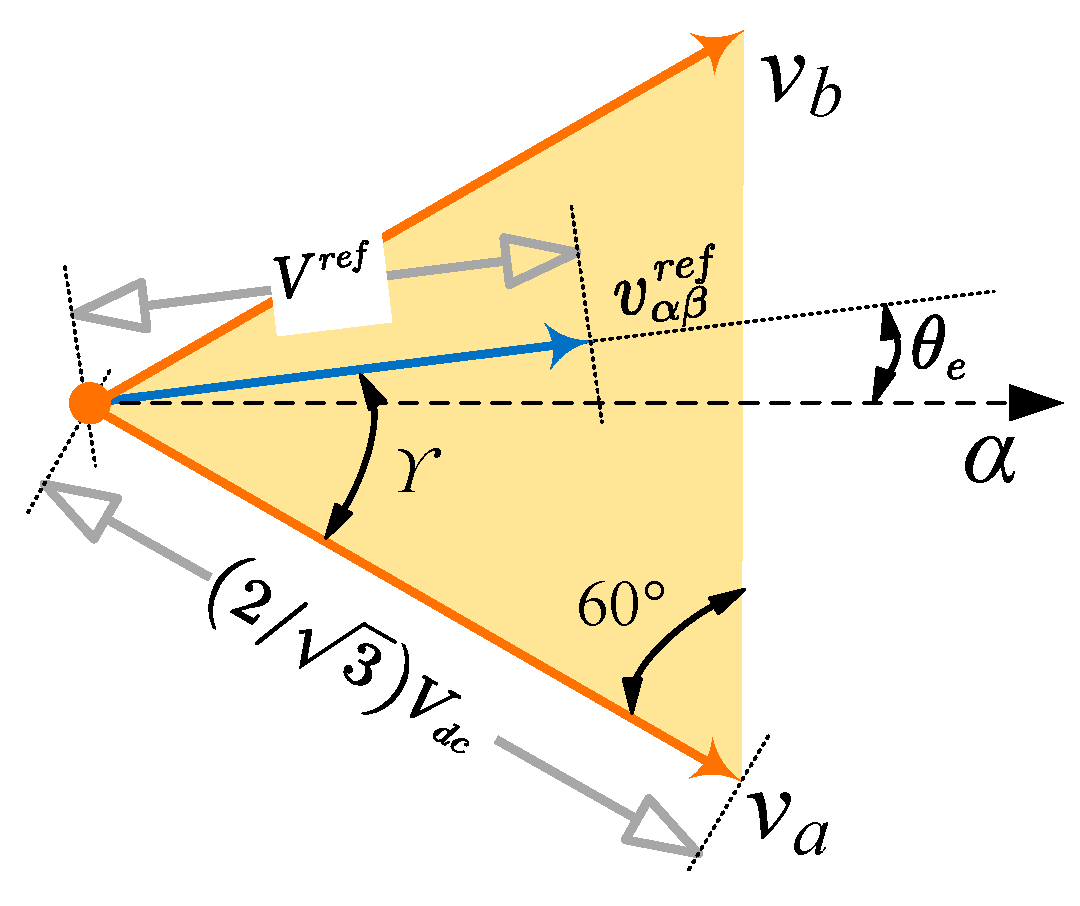
4.3. Overmodulation Design
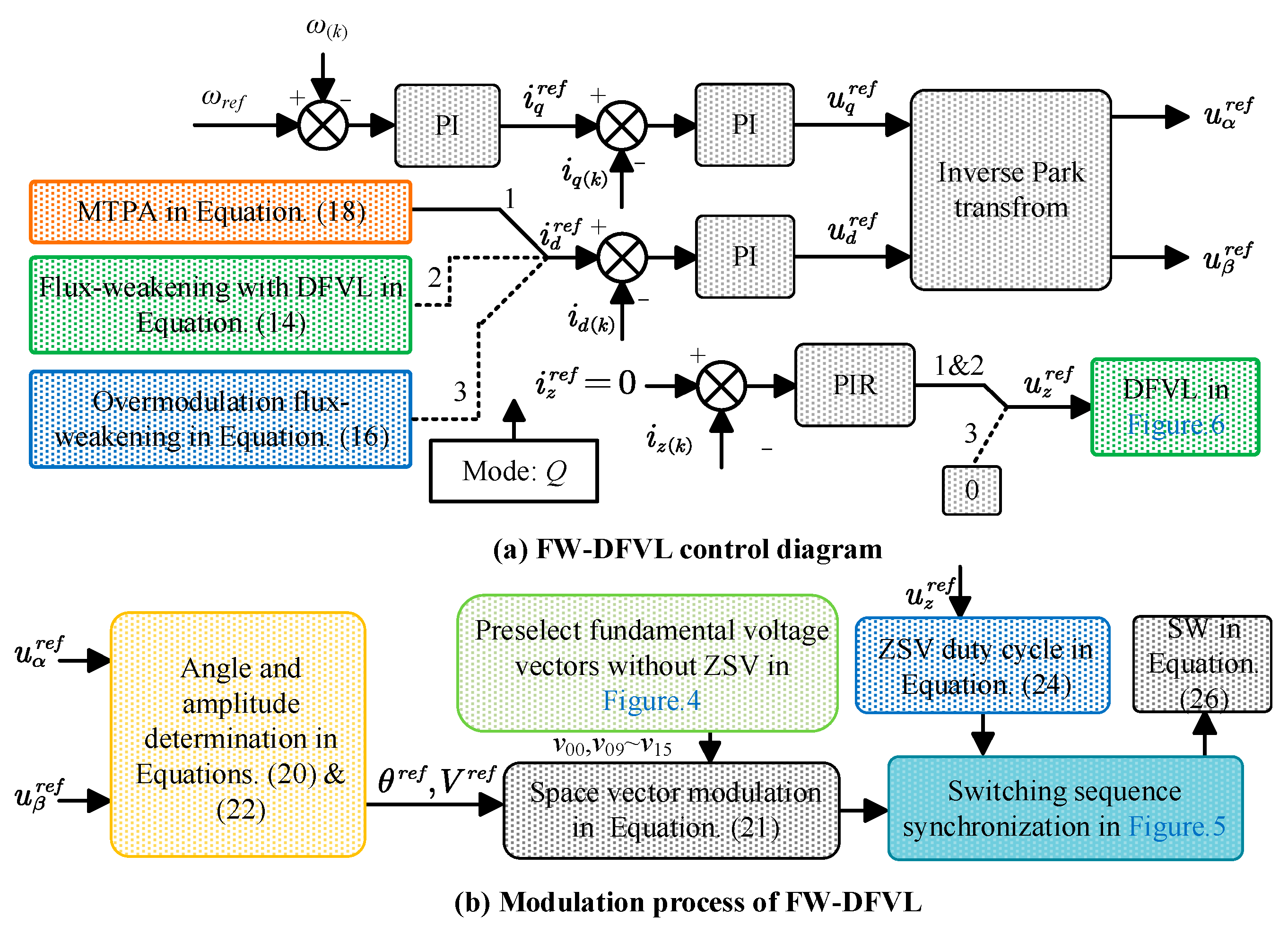
4.4. Total FW-DFVL Control Strategy
4.5. Comparison with Conventional Flux-Weakening Strategy
5. Simulation Results
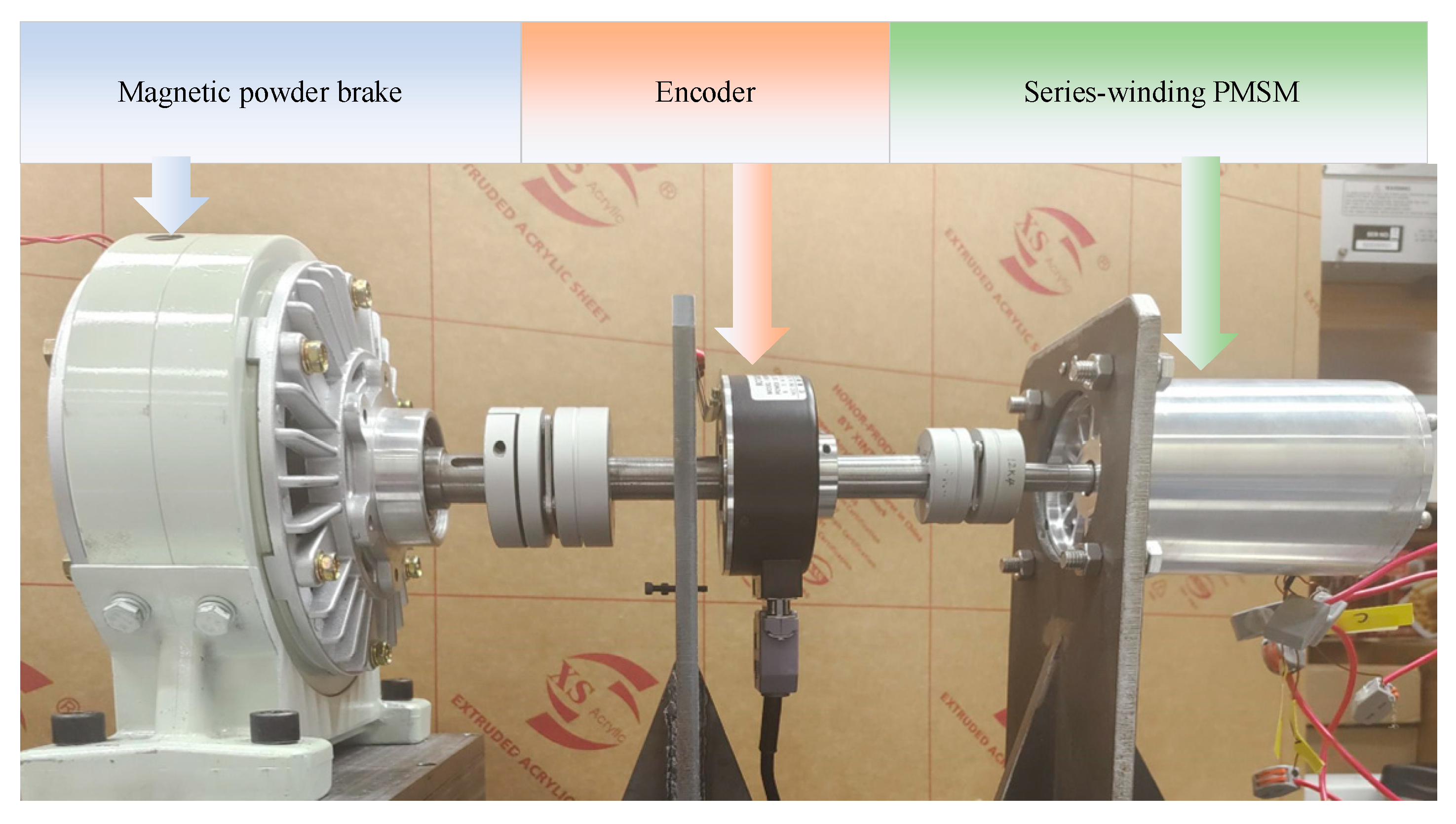
6. Experimental Results
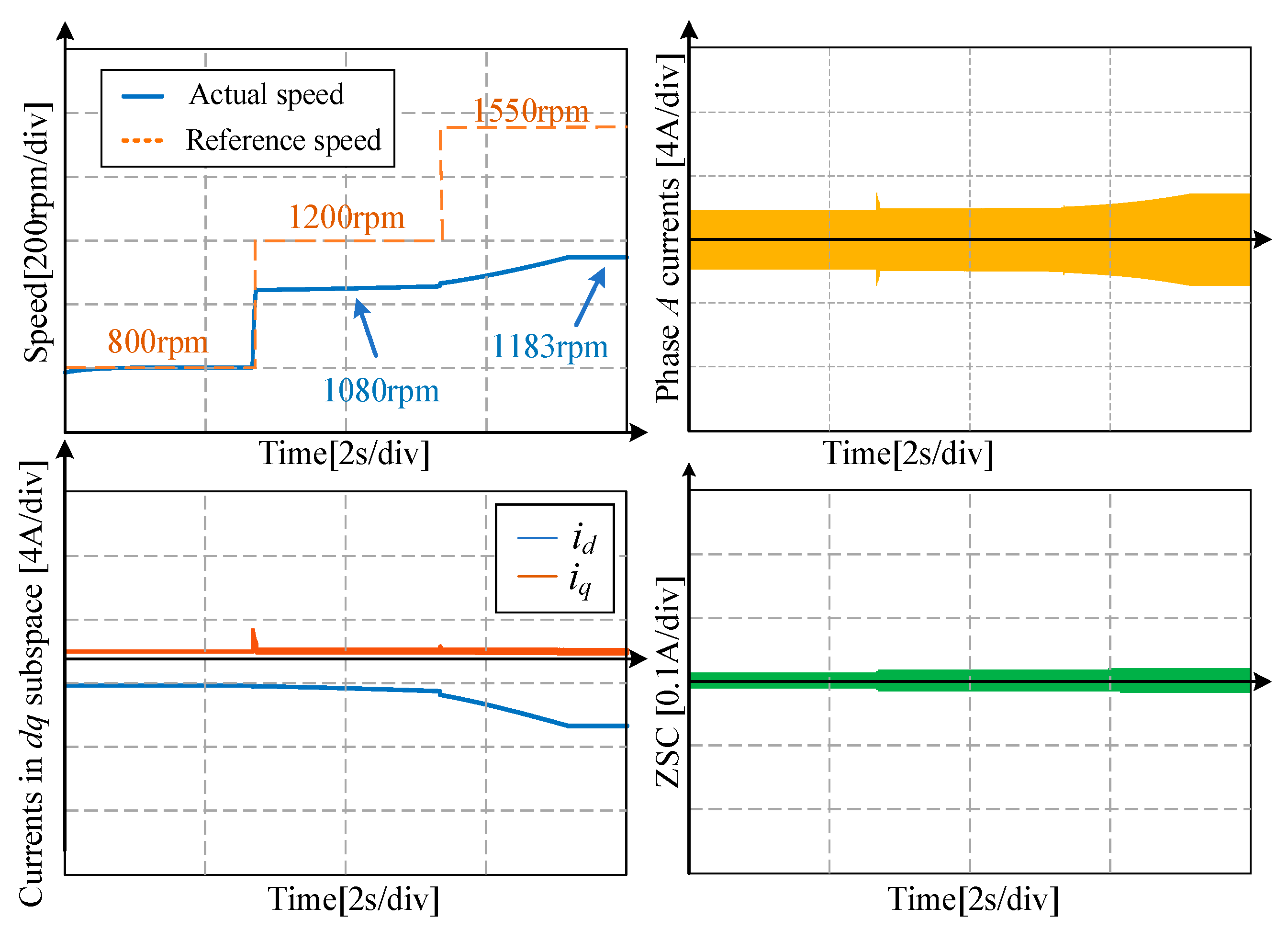
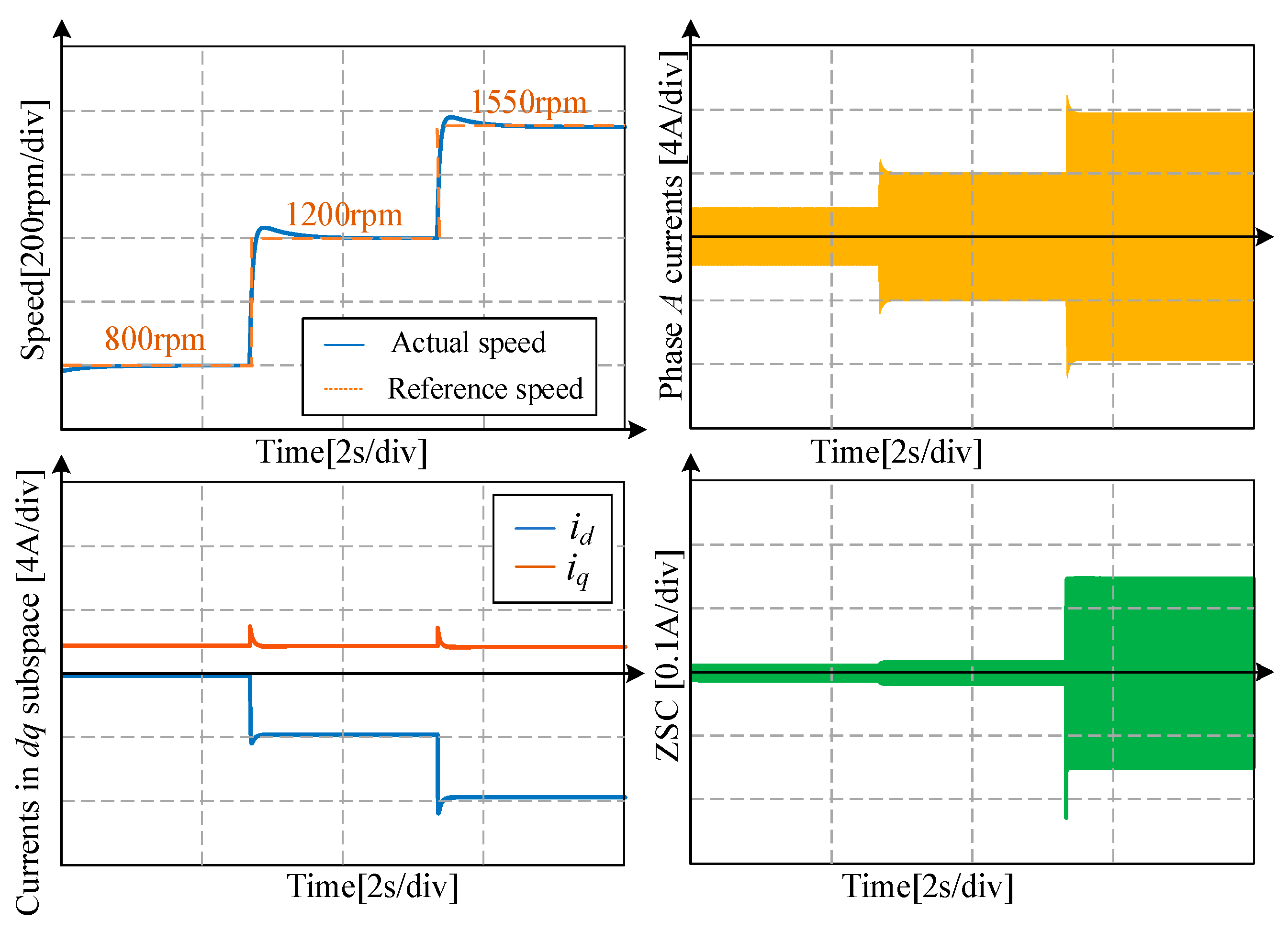
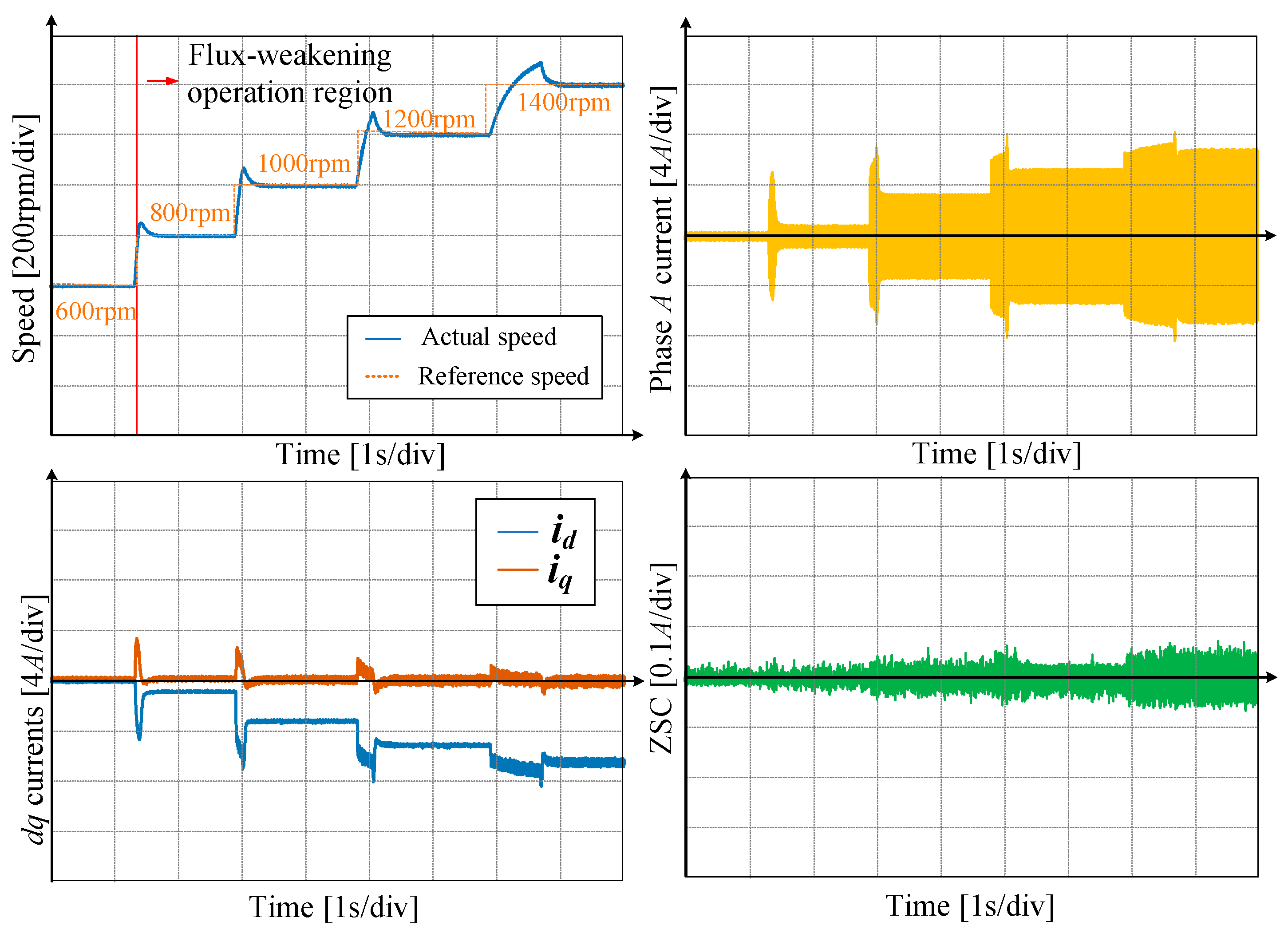
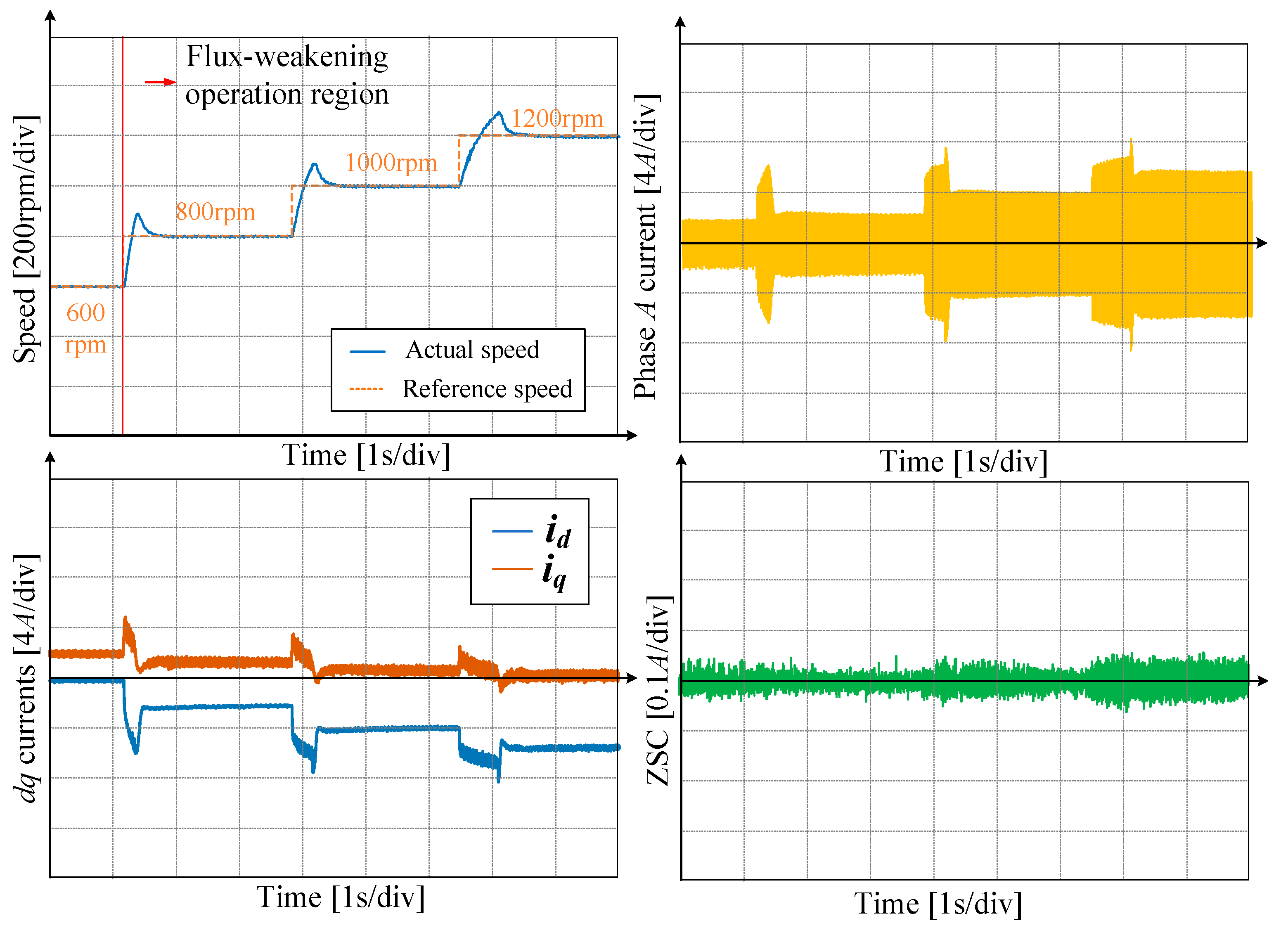
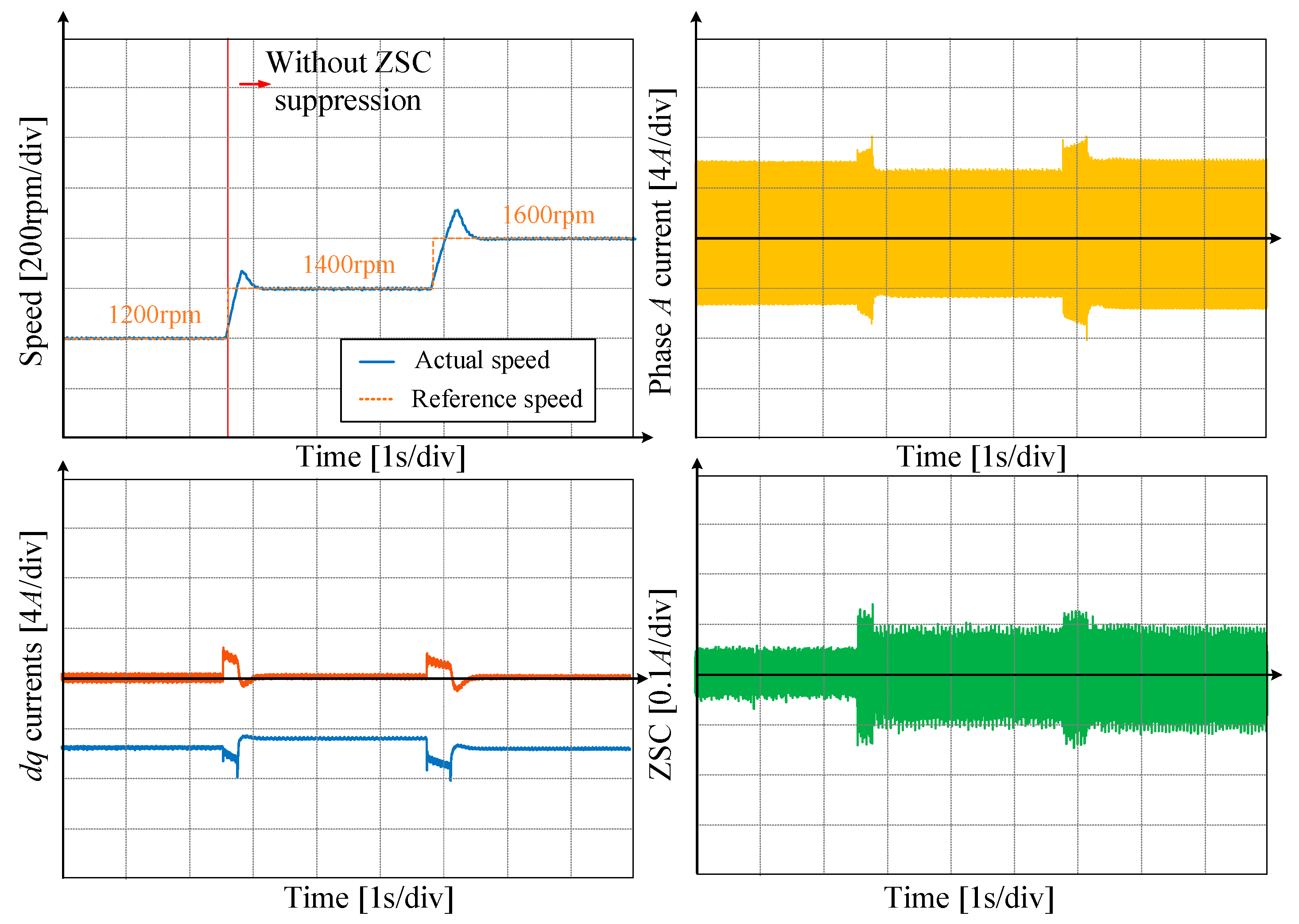
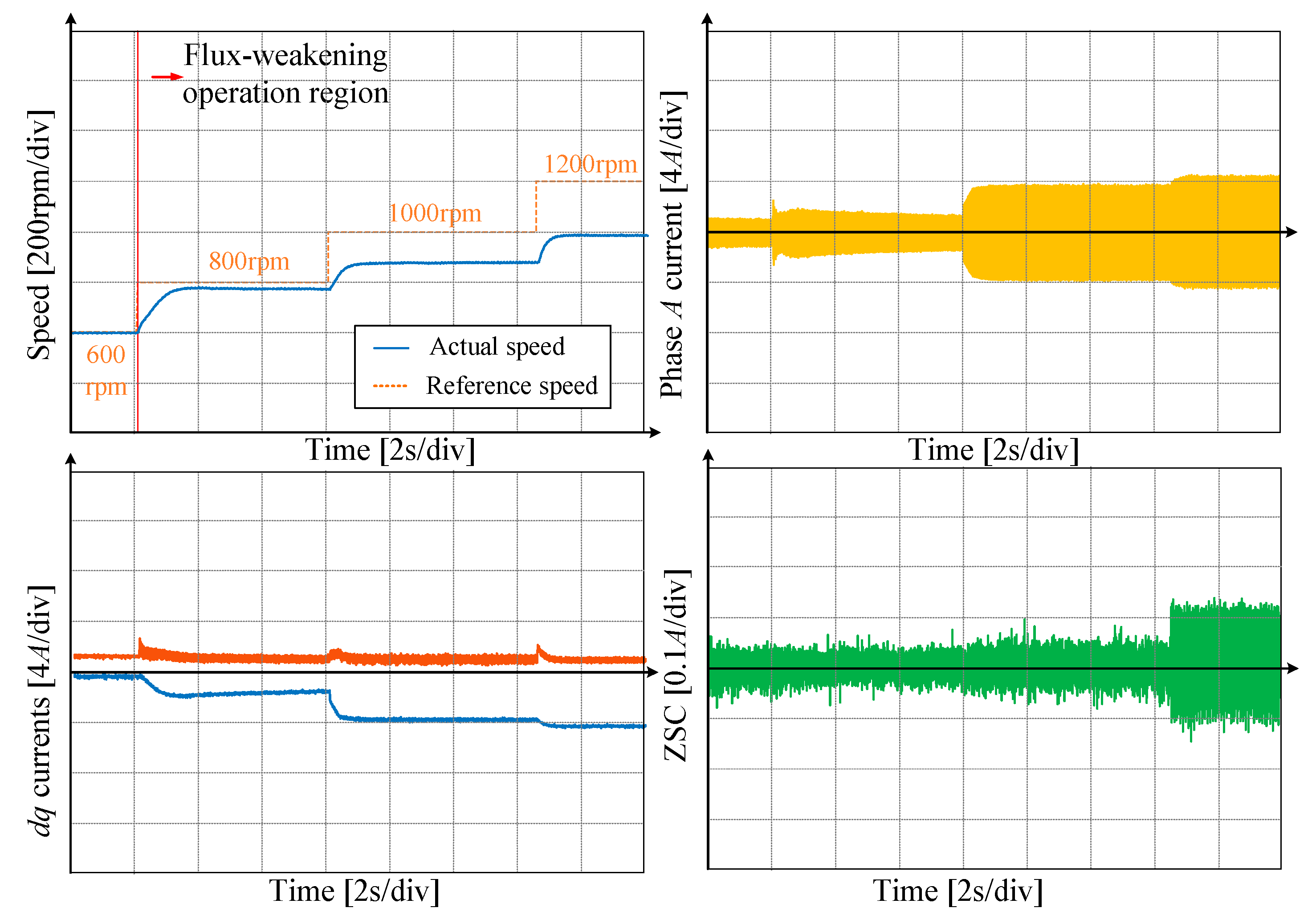
6.1. Dynamic Performance
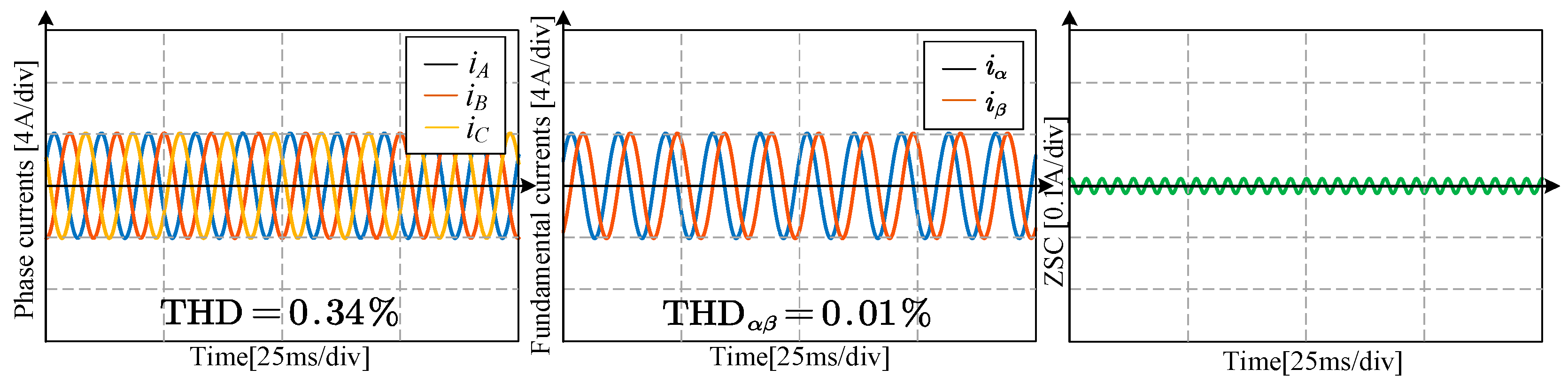
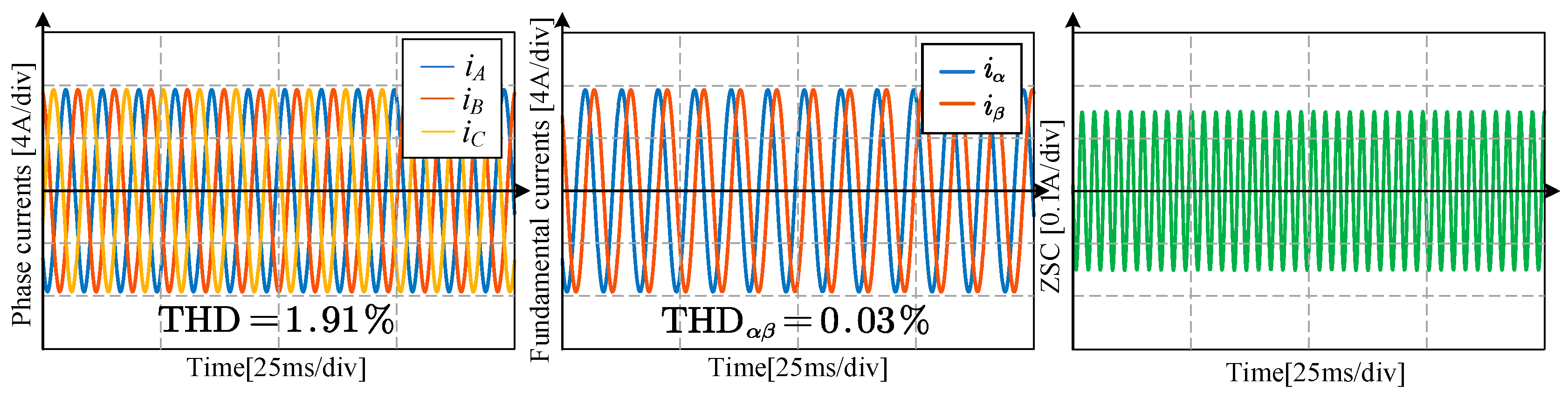
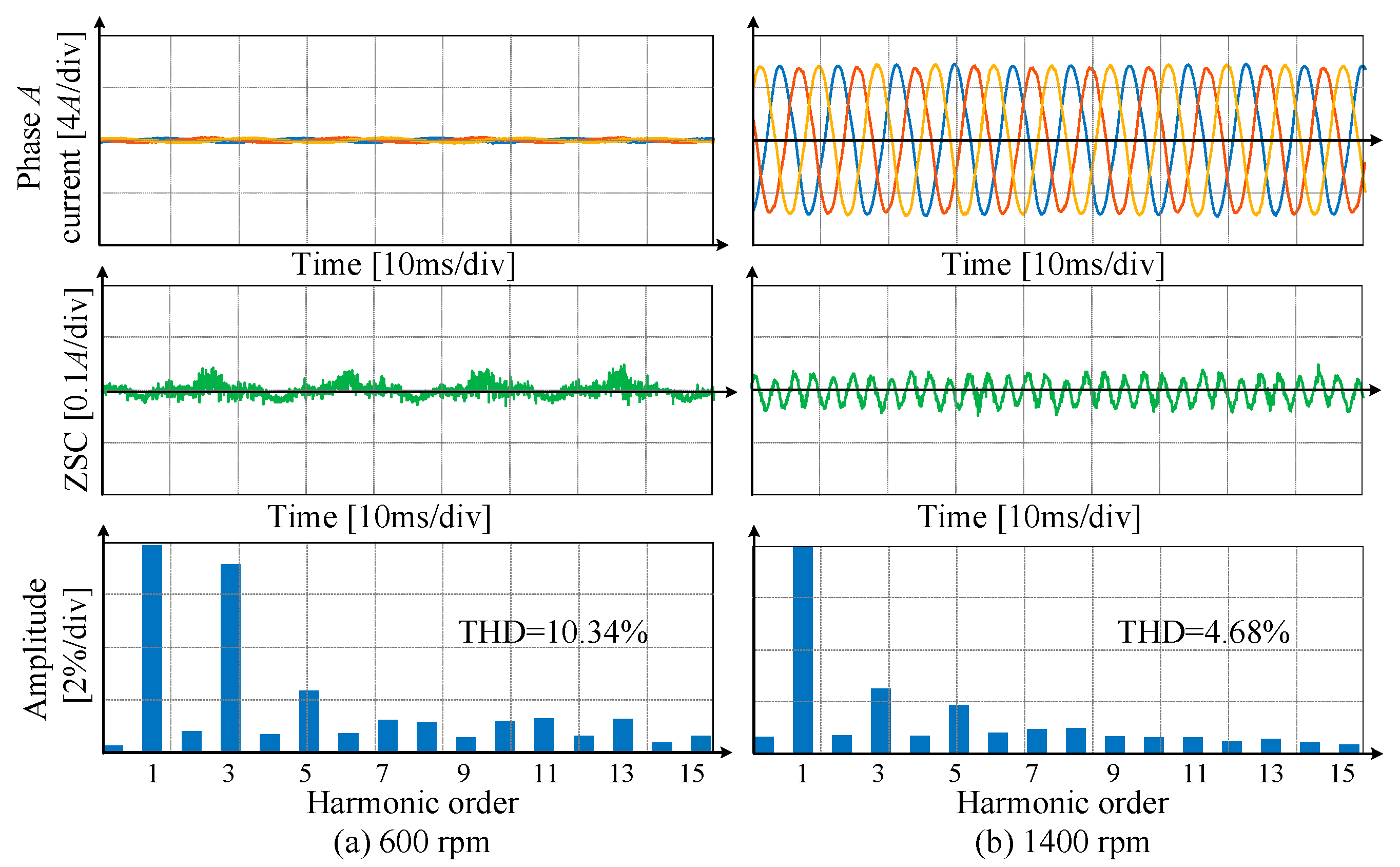
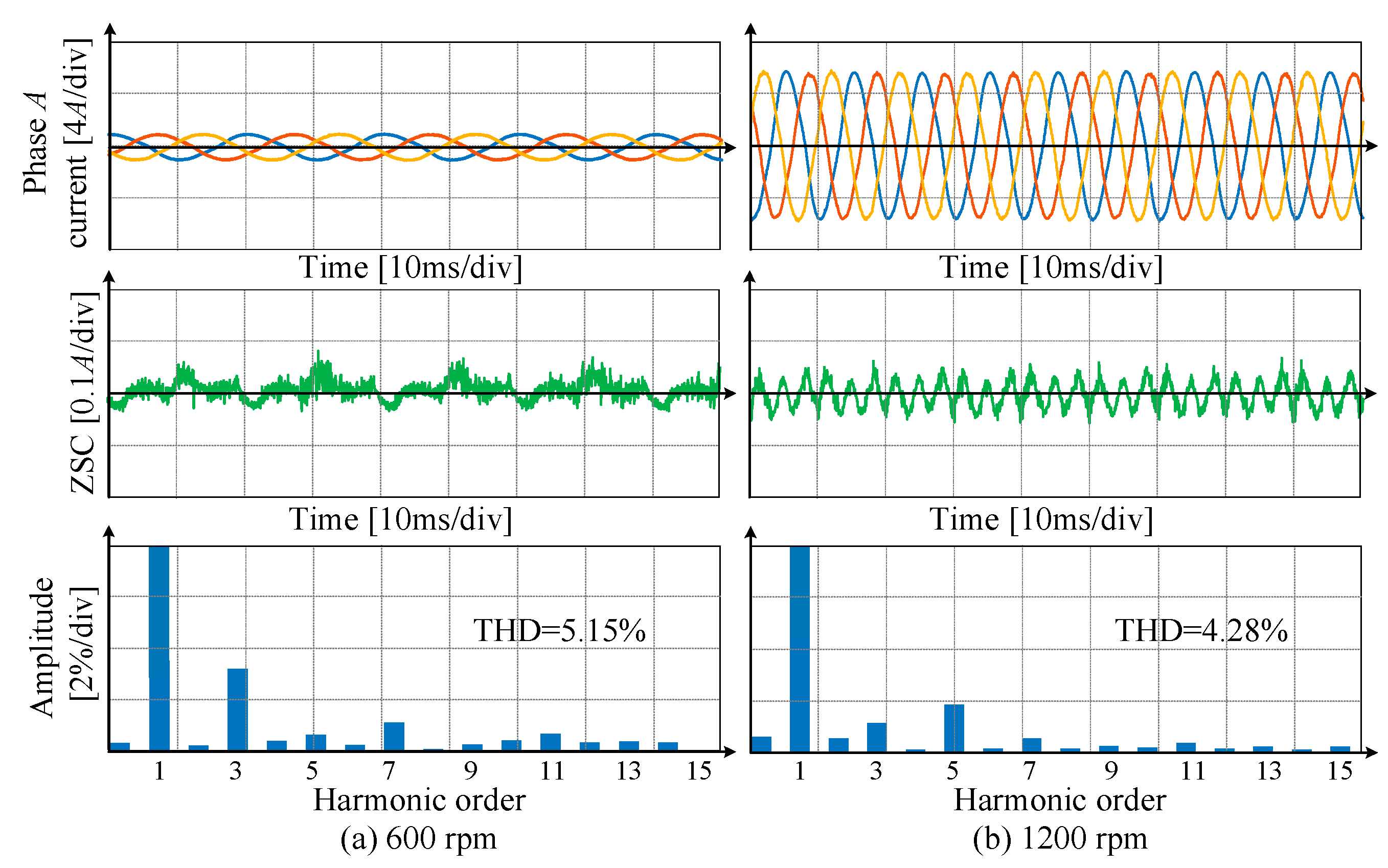
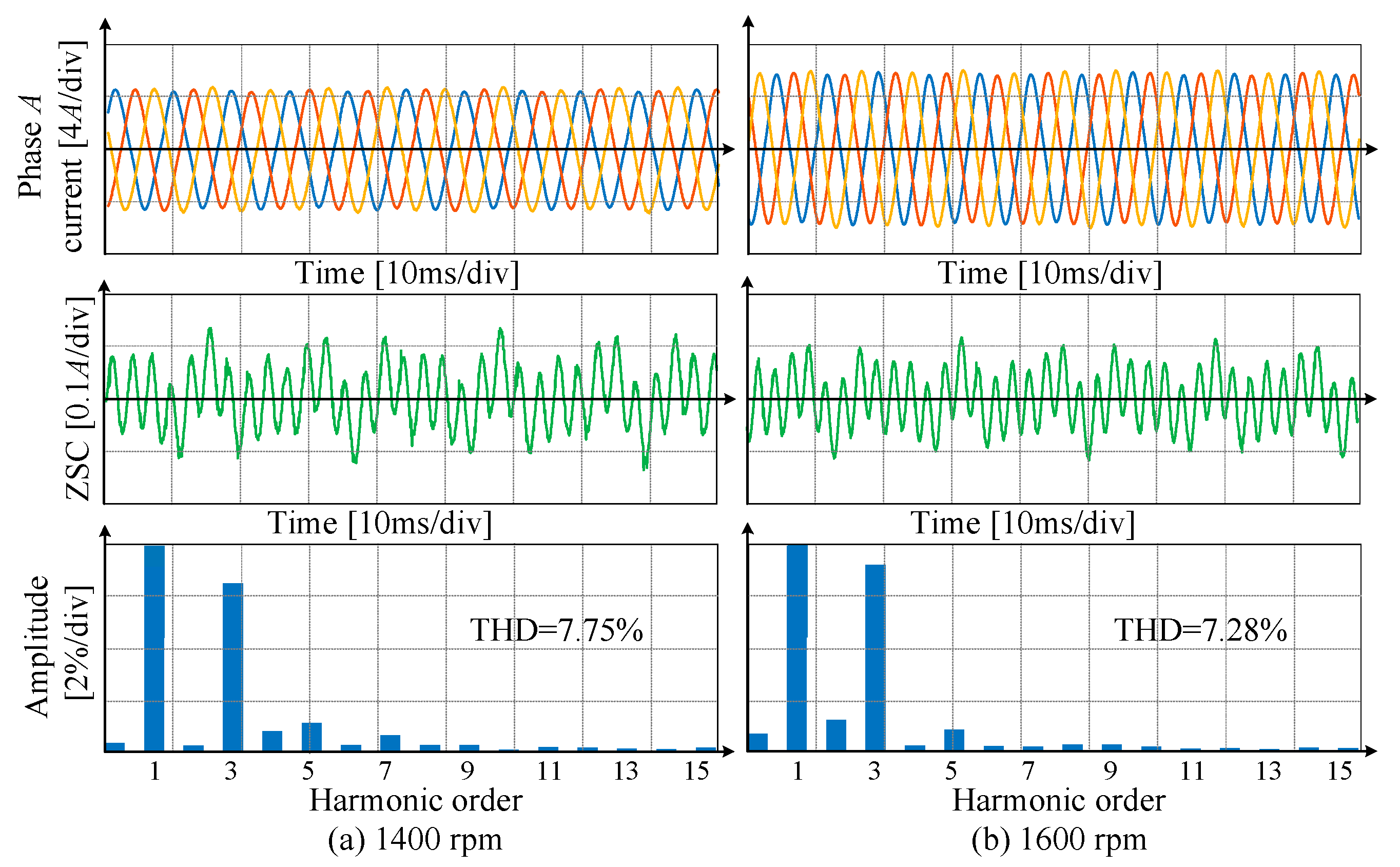
6.2. Steady-State Performance
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bai, J.; Liu, J.; Zheng, P.; Tong, C. Design and analysis of a magnetic-field modulated brushless double-rotor machine—Part I: Pole pair combination of stator, pm rotor and magnetic blocks. IEEE Trans. Ind. Electron. 2018, 66, 2540–2549. [Google Scholar] [CrossRef]
- Liu, S.; Liu, C.; Huang, Y.; Zhao, H. Model Predictive Two-Target Current Control for OW-PMSM. IEEE Trans. Power Electron. 2020, 36, 3224–3235. [Google Scholar] [CrossRef]
- Bindu, R.; Namboothiripad, M.K. Tuning of PID controller for DC servo motor using genetic algorithm. Int. J. Emerg. Technol. Adv. Eng. 2012, 2, 310–314. [Google Scholar]
- Niu, G.; Liu, S. Demagnetization monitoring and life extending control for permanent magnet-driven traction systems. Mech. Syst. Signal Process. 2018, 103, 264–279. [Google Scholar] [CrossRef]
- Yang, J.; Jiang, D.; Sun, H.; Li, A.; Liu, Z. Series-Winding Topology Converter for Active Magnetic Bearing Drive. IEEE Trans. Ind. Electron. 2020, 68, 11772–11782. [Google Scholar] [CrossRef]
- Dong, Z.; Liu, C.; Song, Z.; Liu, S. Suppression of Dual-Harmonic Components for Five-Phase Series-Winding PMSM. IEEE Trans. Transp. Electrif. 2021, 8, 121–134. [Google Scholar] [CrossRef]
- Li, A.; Jiang, D.; Liu, Z.; Sun, X. Generalized PWM Method for Series-End Winding Motor Drive. IEEE Trans. Power Electron. 2020, 36, 4452–4462. [Google Scholar] [CrossRef]
- Liu, S.; Liu, C. Flux Weakening Control for Dual Three-Phase PMSM. In Proceedings of the 2018 Asia-Pacific Magnetic Recording Conference (APMRC), Shanghai, China, 15–17 November 2018; pp. 1–2. [Google Scholar] [CrossRef]
- Fan, W.; Zhu, X.; Quan, L.; Wu, W.; Xu, L.; Liu, Y. Flux-Weakening Capability Enhancement Design and Optimization of a Controllable Leakage Flux Multilayer Barrier PM Motor. IEEE Trans. Ind. Electron. 2020, 68, 7814–7825. [Google Scholar] [CrossRef]
- Fang, S.; Liu, Q.; Lin, H.; Ho, S.L. A Novel Flux Weakening Control Strategy for Permanent Magnet Actuator of Vacuum Circuit Breaker. IEEE Trans. Ind. Electron. 2015, 63, 2275–2283. [Google Scholar] [CrossRef]
- Jahns, T.M. Flux-Weakening Regime Operation of an Interior Permanent-Magnet Synchronous Motor Drive. IEEE Trans. Ind. Appl. 1987, IA-23, 681–689. [Google Scholar] [CrossRef]
- Tapia, J.; Leonardi, F.; Lipo, T. Consequent-pole permanent-magnet machine with extended field-weakening capability. IEEE Trans. Ind. Appl. 2003, 39, 1704–1709. [Google Scholar] [CrossRef] [Green Version]
- Morimoto, S.; Sanada, M.; Takeda, Y. Effects and Compensation of Magnetic Saturation in Flux-Weakening Controlled Permanent Magnet Synchronous Motor Drives. IEEE Trans. Ind. Appl. 1994, 30, 1632. [Google Scholar] [CrossRef]
- Cheng, B.; Tesch, T.R. Torque Feedforward Control Technique for Permanent Magnet Synchronous Motors. In Proceedings of the IECON 2007—33rd Annual Conference of the IEEE Industrial Electronics Society, Taipei, Taiwan, 5–8 November 2007; pp. 1055–1060. [Google Scholar] [CrossRef]
- Wang, C.; Zhu, Z.Q. Fuzzy Logic Speed Control of Permanent Magnet Synchronous Machine and Feedback Voltage Ripple Reduction in Flux-Weakening Operation Region. IEEE Trans. Ind. Appl. 2020, 56, 1505–1517. [Google Scholar] [CrossRef]
- Lu, D.; Kar, N.C. A Review of Flux-Weakening Control in Permanent Magnet Synchronous Machines. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010. [Google Scholar]
- Kwon, Y.-C.; Kim, S.; Sul, S.-K. Voltage Feedback Current Control Scheme for Improved Transient Performance of Permanent Magnet Synchronous Machine Drives. IEEE Trans. Ind. Electron. 2011, 59, 3373–3382. [Google Scholar] [CrossRef]
- Liu, S.; Liu, C. Virtual-Vector-Based Robust Predictive Current Control for Dual Three-Phase PMSM. IEEE Trans. Ind. Electron. 2020, 68, 2048–2058. [Google Scholar] [CrossRef]
- Preindl, M.; Bolognani, S. Model Predictive Direct Torque Control With Finite Control Set for PMSM Drive Systems, Part 2: Field Weakening Operation. IEEE Trans. Ind. Inform. 2012, 9, 648–657. [Google Scholar] [CrossRef]
- Bianchi, N.; Carlet, P.G.; Cinti, L.; Ortombina, L. A Review about Flux-Weakening Operating Limits and Control Techniques for Synchronous Motor Drives. Energies 2022, 15, 1930. [Google Scholar] [CrossRef]
- Yang, J.; Jiang, D.; Sun, H.; Ding, J.; Li, A.; Liu, Z. A Series-Winding Topology Converter With Capability of Fault-Tolerant Operation for Active Magnetic Bearing Drive. IEEE Trans. Ind. Electron. 2021, 69, 6678–6687. [Google Scholar] [CrossRef]
- Manzolini, V.; Da Ru, D.; Bolognani, S. An Effective Flux Weakening Control of a SyRM Drive Including MTPV Operation. IEEE Trans. Ind. Appl. 2018, 55, 2700–2709. [Google Scholar] [CrossRef]
- Li, A.; Jiang, D.; Sun, X.; Liu, Z. Method of Expanding Operating Range for Three-phase Series-end Winding Motor Drive. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 2020–2025. [Google Scholar] [CrossRef]
- Dong, Z.; Liu, C.; Liu, S.; Song, Z. Deadbeat Predictive Current Control for Series-Winding PMSM Drive with Half-Bridge Power Module-Based Inverter. Energies 2021, 14, 4620. [Google Scholar] [CrossRef]
- Liu, S.; Liu, C. Direct Harmonic Current Control Scheme for Dual Three-Phase PMSM Drive System. IEEE Trans. Power Electron. 2021, 36, 11647–11657. [Google Scholar] [CrossRef]
- Song, Z.; Liu, C.; Liu, S.; Wang, W. Active harmonic suppression of low-reactance multi-phase slotless permanent magnet synchronous machines. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 10, 1777–1787. [Google Scholar] [CrossRef]
- Ren, Z.; Ji, J.; Tang, H.; Tao, T.; Huang, L.; Zhao, W. Model Predictive Torque Control for a Dual Three-phase PMSM Using Modified Dual Virtual Vector Modulation Method. Chin. J. Electr. Eng. 2022, 8, 91–103. [Google Scholar] [CrossRef]
- Liu, S.; Liu, C.; Song, Z.; Dong, Z.; Huang, Y. Candidate Modulation Patterns Solution for Five-Phase PMSM Drive System. IEEE Trans. Transp. Electrif. 2021, 8, 1194–1208. [Google Scholar] [CrossRef]
- Liu, S.; Liu, C.; Huang, Y.; Xiao, Y. Direct Modulation Pattern Control for Dual Three-Phase PMSM Drive System. IEEE Trans. Ind. Electron. 2021, 69, 110–120. [Google Scholar] [CrossRef]
- Mohamed, Y.-R.; Lee, T. Adaptive Self-Tuning MTPA Vector Controller for IPMSM Drive System. IEEE Trans. Energy Convers. 2006, 21, 636–644. [Google Scholar] [CrossRef]
- Liu, S.; Song, Z.; Dong, Z.; Liu, Y.; Liu, C. Generic Carrier-Based PWM Solution for Series-End Winding PMSM Traction System With Adaptative Overmodulation Scheme. IEEE Trans. Transp. Electrif. 2022, 9, 712–726. [Google Scholar] [CrossRef]
- Liu, S.; Liu, C.; Zhao, H.; Liu, Y.; Dong, Z. Improved Flux Weakening Control Strategy for Five-Phase PMSM Considering Harmonic Voltage Vectors. IEEE Trans. Power Electron. 2022, 37, 10967–10980. [Google Scholar] [CrossRef]
- Song, Z.; Liu, C.; Dong, Z.; Huang, R. Improved Multi-Stage Decoupling Space Vector Modulation for Asymmetrical Multi-Phase PMSM With Series Winding Connection. IEEE Trans. Power Electron. 2022, 37, 10951–10966. [Google Scholar] [CrossRef]
- Zhan, H.; Zhu, Z.-Q.; Odavic, M. Analysis and Suppression of Zero Sequence Circulating Current in Open Winding PMSM Drives With Common DC Bus. IEEE Trans. Ind. Appl. 2017, 53, 3609–3620. [Google Scholar] [CrossRef]
- Taha, W.; Emadi, A. Online Non-Parametric Auto-Tuning of Flux Weakening Controller for IPMSM Drives Using Modified Relay Feedback Test. In Proceedings of the 2021 IEEE Transportation Electrification Conference & Expo (ITEC), Chicago, IL, USA, 21–25 June 2021. [Google Scholar]
- Bolognani, S.; Calligaro, S.; Petrella, R. Optimal Voltage Feed-Back Flux-Weakening Control of IPMSM. In Proceedings of the IECON 2011—37th Annual Conference of the IEEE Industrial Electronics Society, Melbourne, Australia, 7–10 November 2011. [Google Scholar]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Value |
|---|---|---|
| np | Number of pole pairs | 5 |
| Rs (Ω) | Stator resistance | 1.4 |
| Ld (mH) | Inductance in d-axis | 3.7 |
| Lq (mH) | Inductance in q-axis | 5.0 |
| Lz (mH) | Inductance in the z-axis | 8.4 |
| ψf (Wb) | Magnet flux linkage | 0.04 |
| ψf3 (mWb) | Third-order magnet flux linkage | 12 |
| J (kg.m2) | Rotational inertia | 0.00005 |
| VDC (V) | DC bus voltage | 24 |
| Speed (r/min) | Rated speed | 800 |
| Torque (N.m) | Rated torque | 4.5 |
| F (kHz) | Sampling frequency | 20 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, S.; Song, Z.; Zhang, B.; Liu, C. Flux Weakening Controller Design for Series-Winding Three-Phase PMSM Drive Systems. World Electr. Veh. J. 2023, 14, 107. https://doi.org/10.3390/wevj14040107
Liu S, Song Z, Zhang B, Liu C. Flux Weakening Controller Design for Series-Winding Three-Phase PMSM Drive Systems. World Electric Vehicle Journal. 2023; 14(4):107. https://doi.org/10.3390/wevj14040107
Chicago/Turabian StyleLiu, Senyi, Zaixin Song, Bowen Zhang, and Chunhua Liu. 2023. "Flux Weakening Controller Design for Series-Winding Three-Phase PMSM Drive Systems" World Electric Vehicle Journal 14, no. 4: 107. https://doi.org/10.3390/wevj14040107