
Optimization of a Speed Controller of a WECS with Metaheuristic Algorithms †

 ,
,
Abstract
:1. Introduction
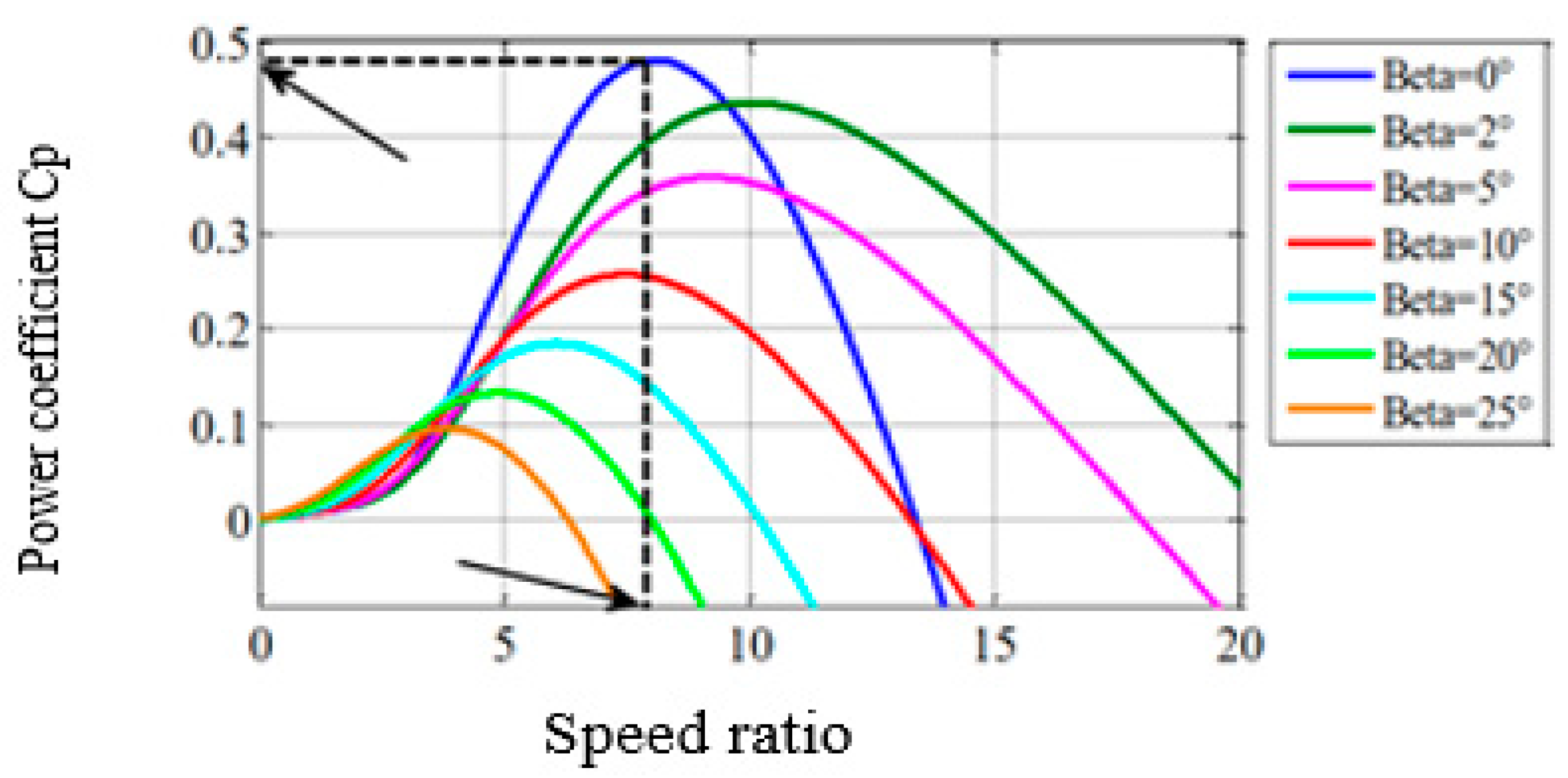
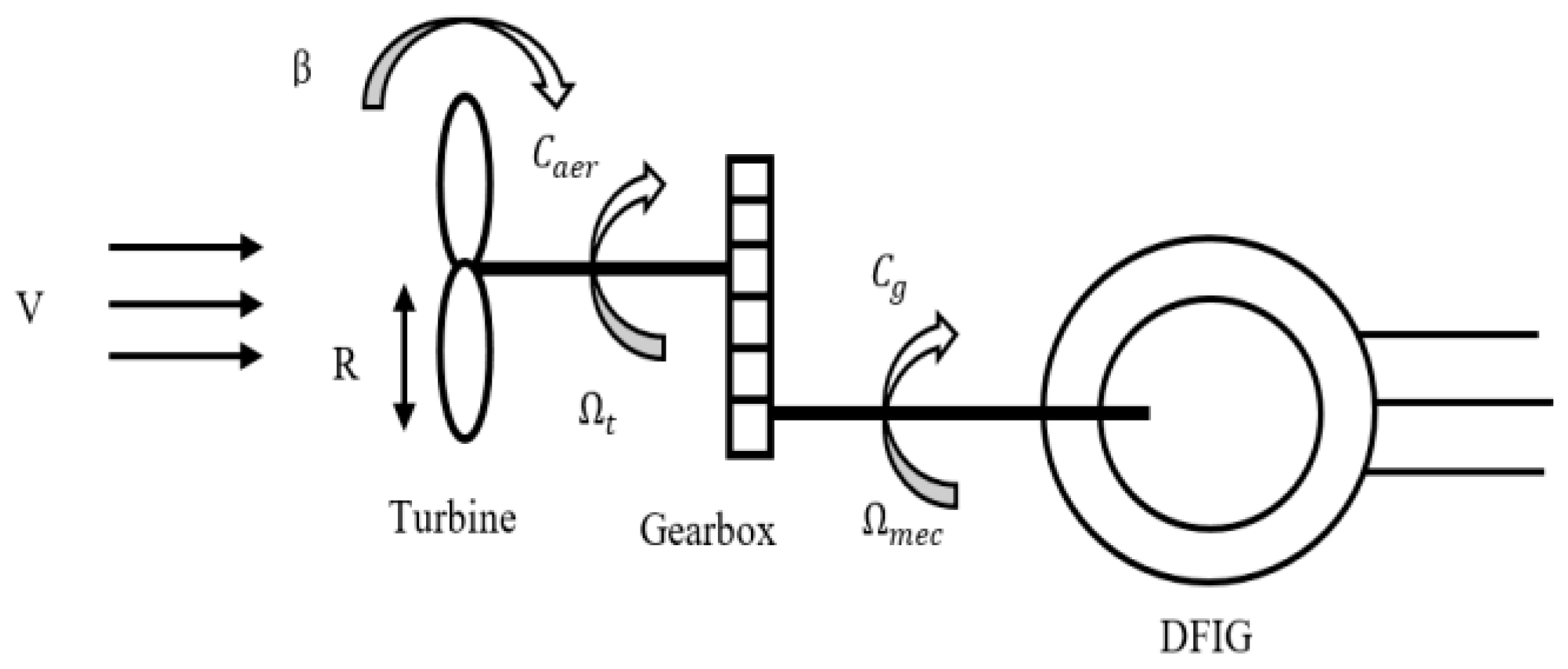
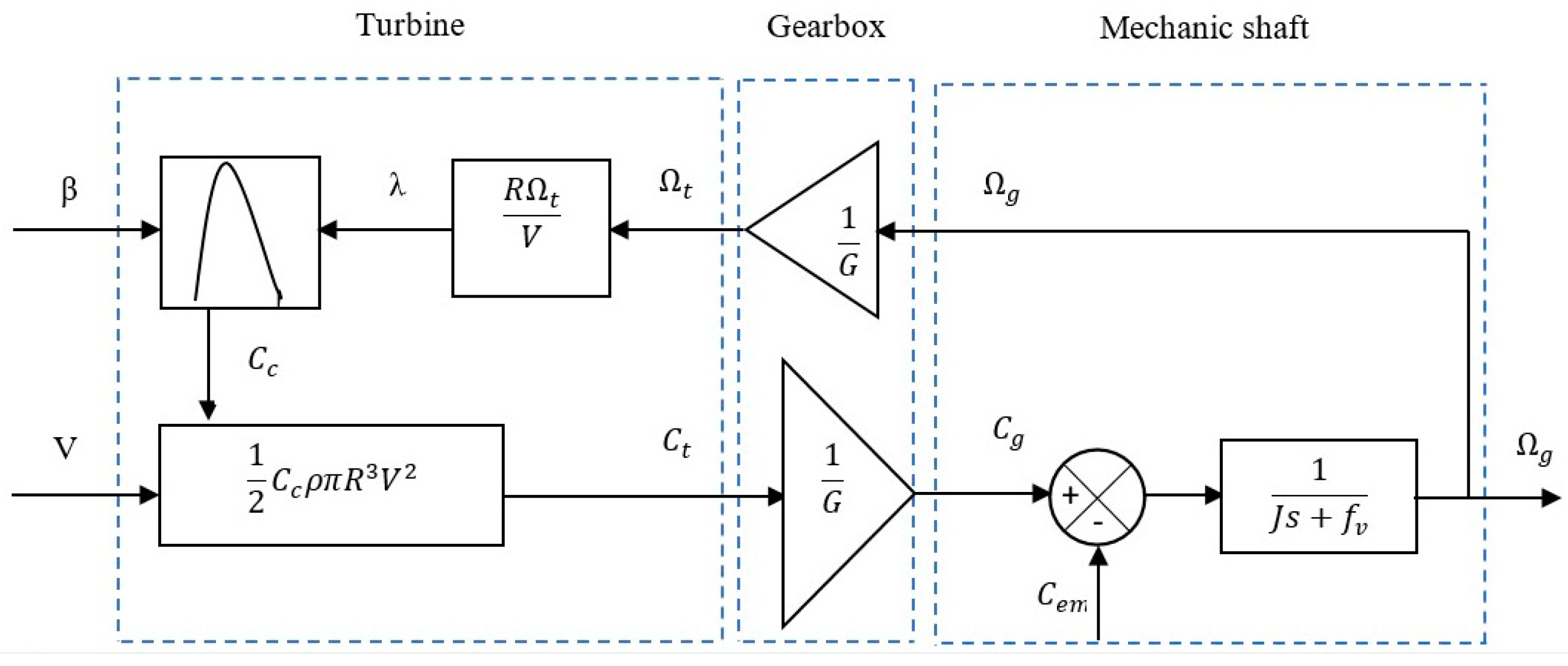
2. Modeling of the WECS
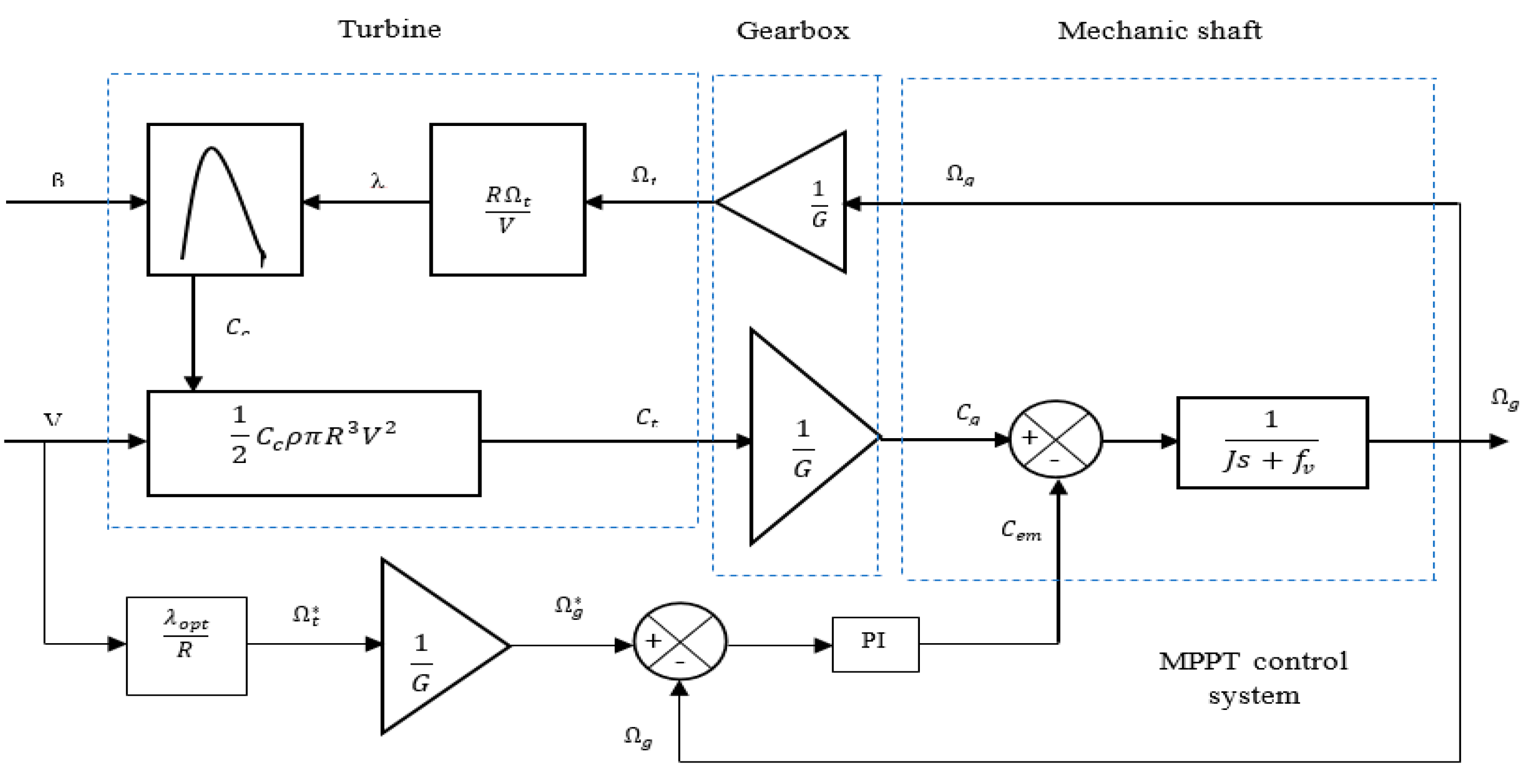
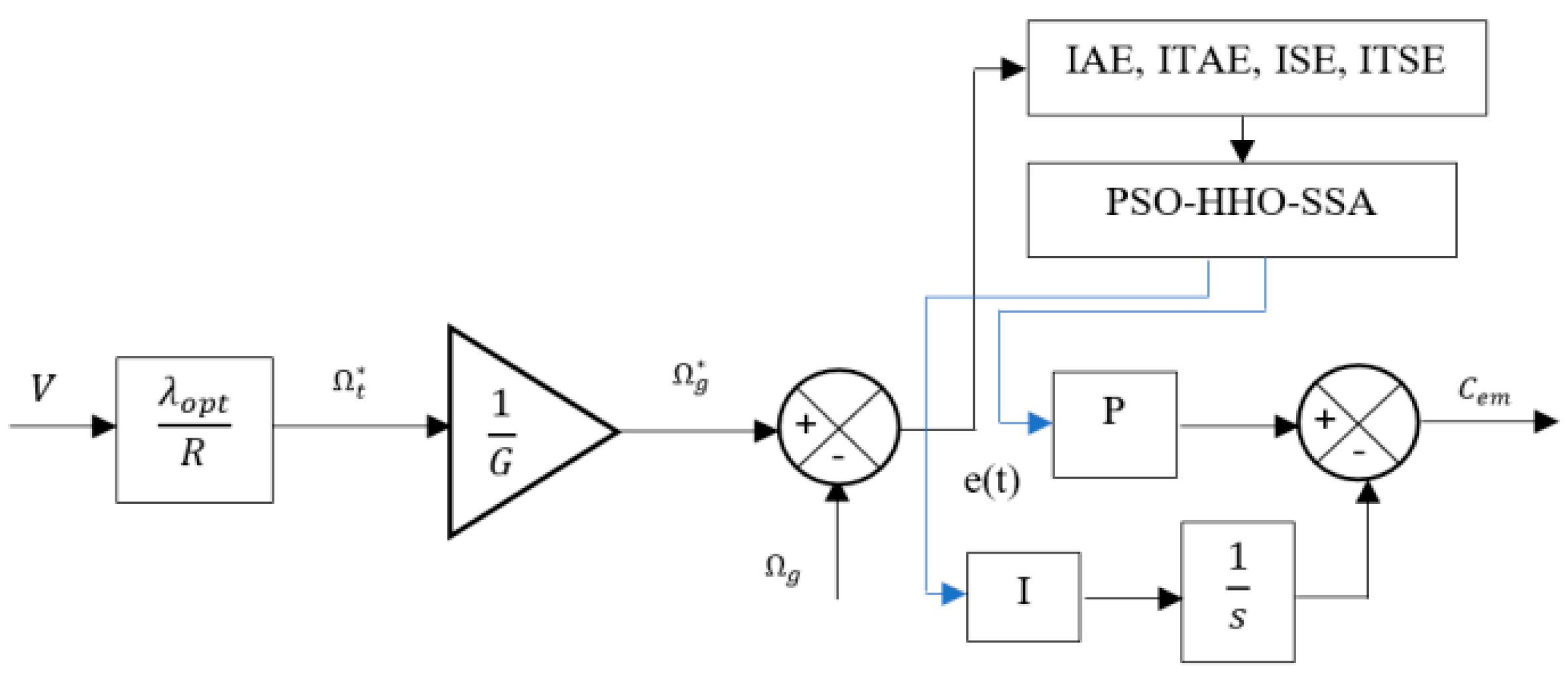
The MPPT of the Proposed Wind Energy System
3. DFIG Modeling
4. Proposed Optimization Algorithm
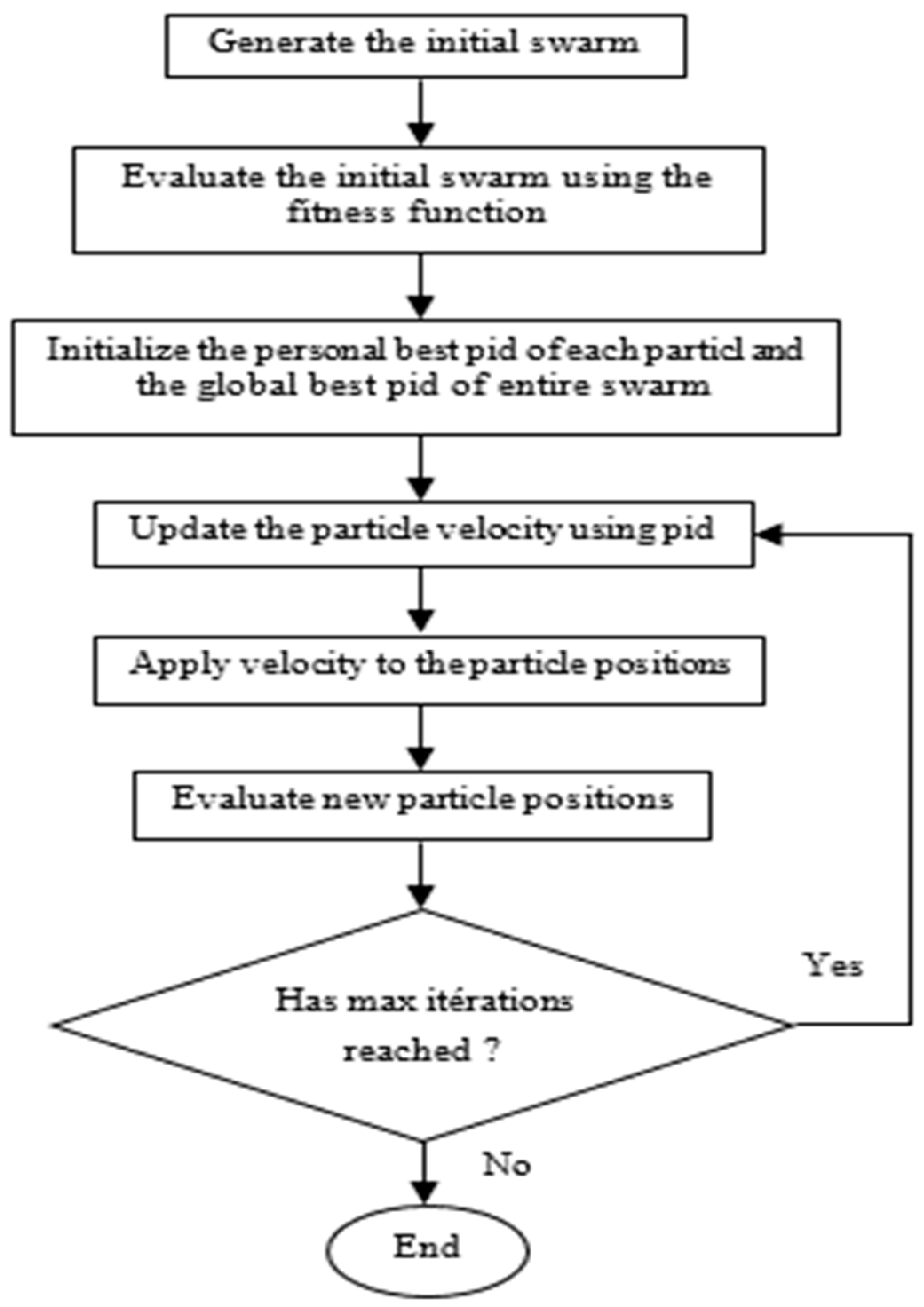
4.1. Particle Swarm Optimization (PSO)
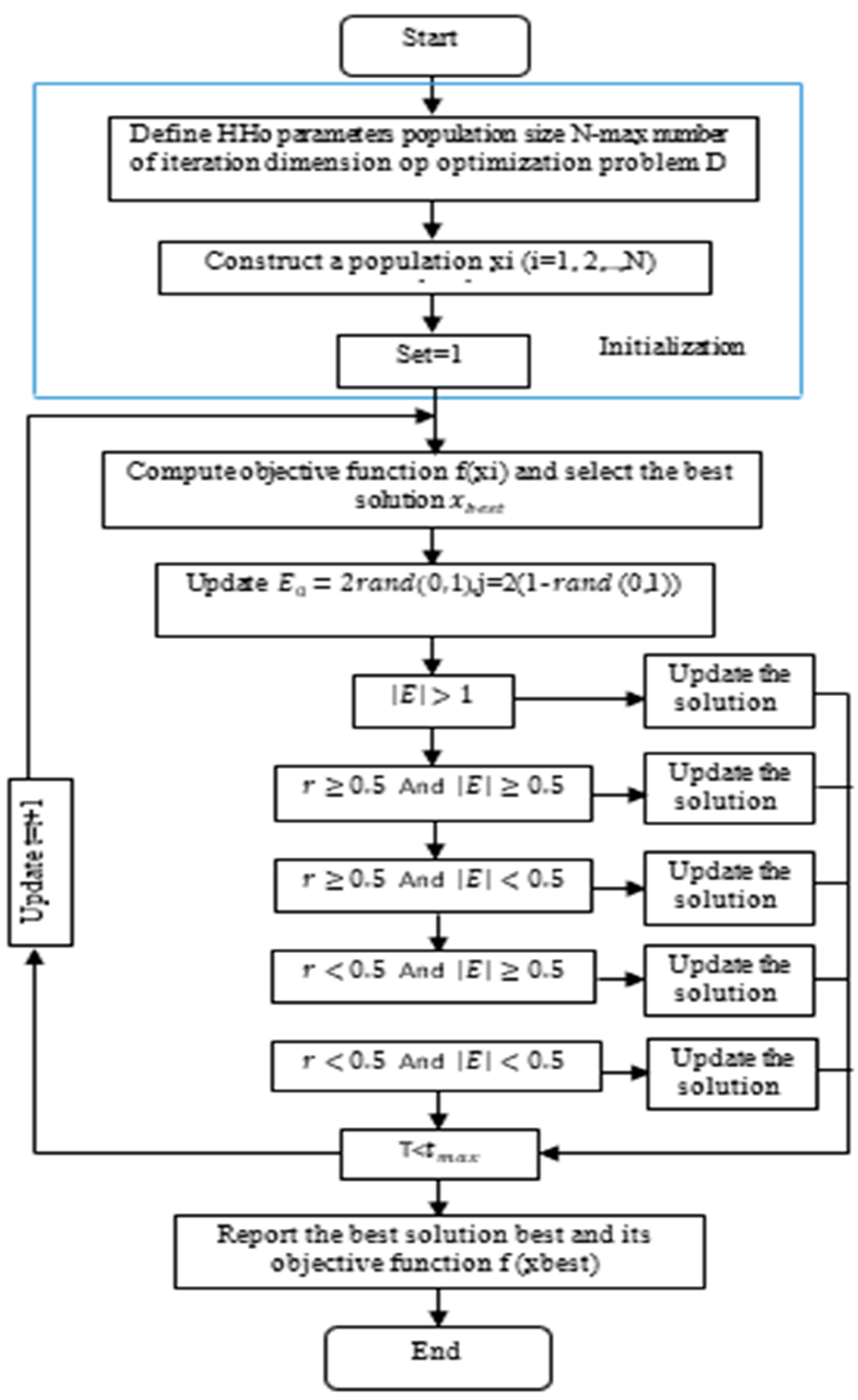
4.2. Harris Hawks Optimization (HHO)
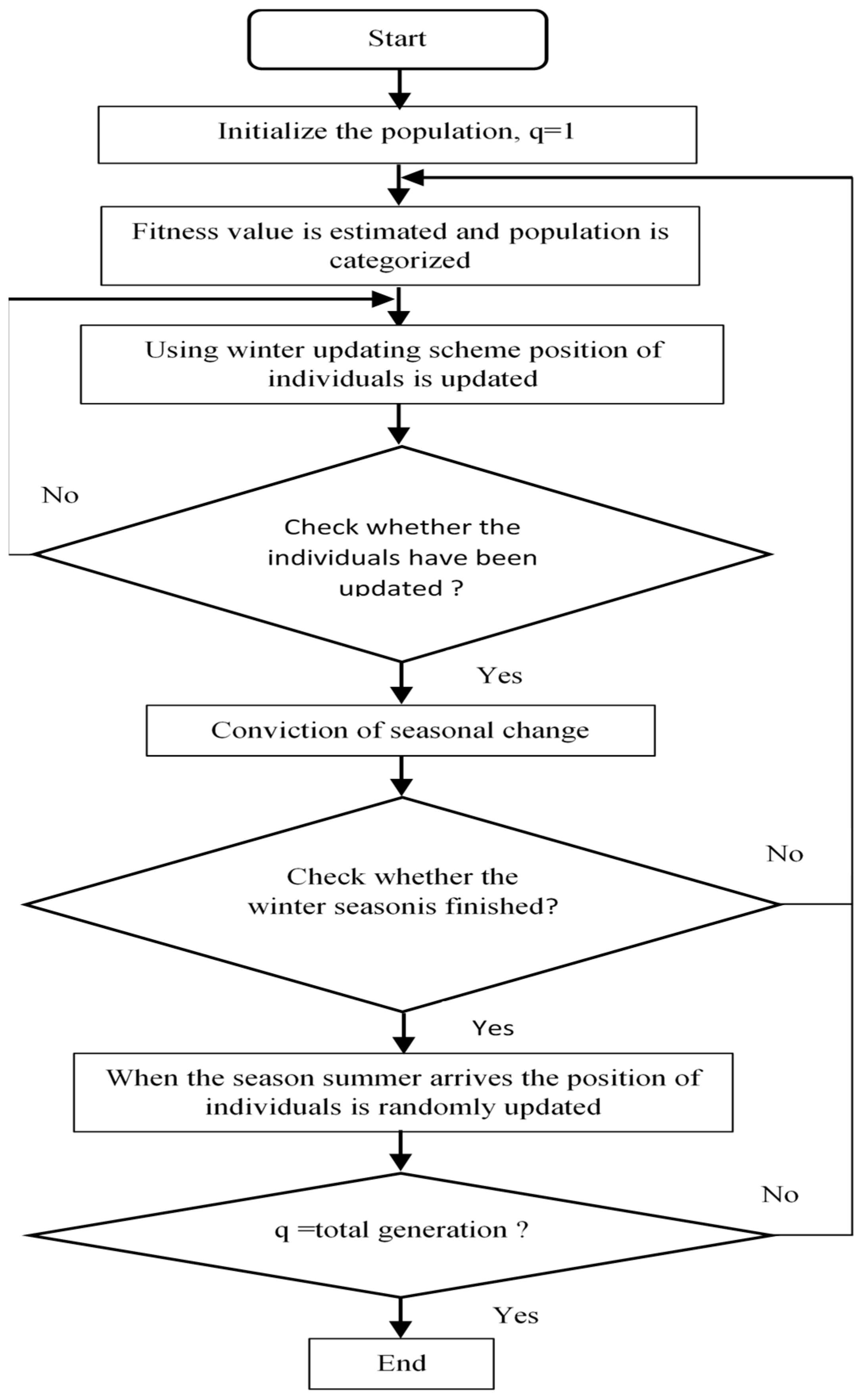
4.3. Salp Swarm Algorithm (SSA)
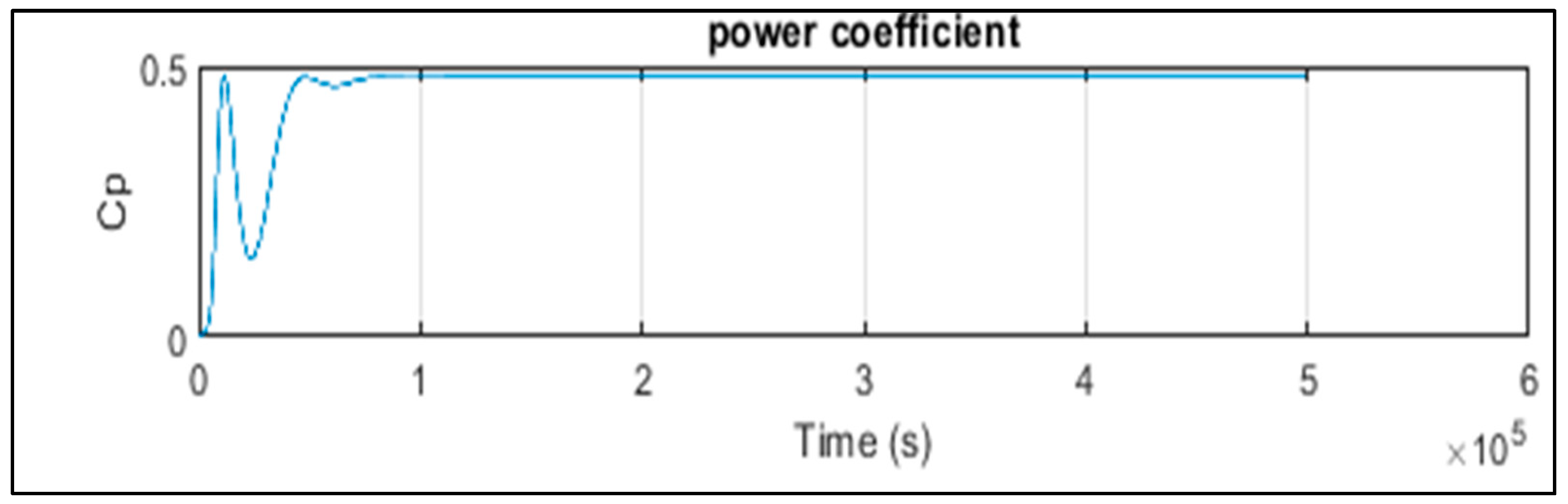
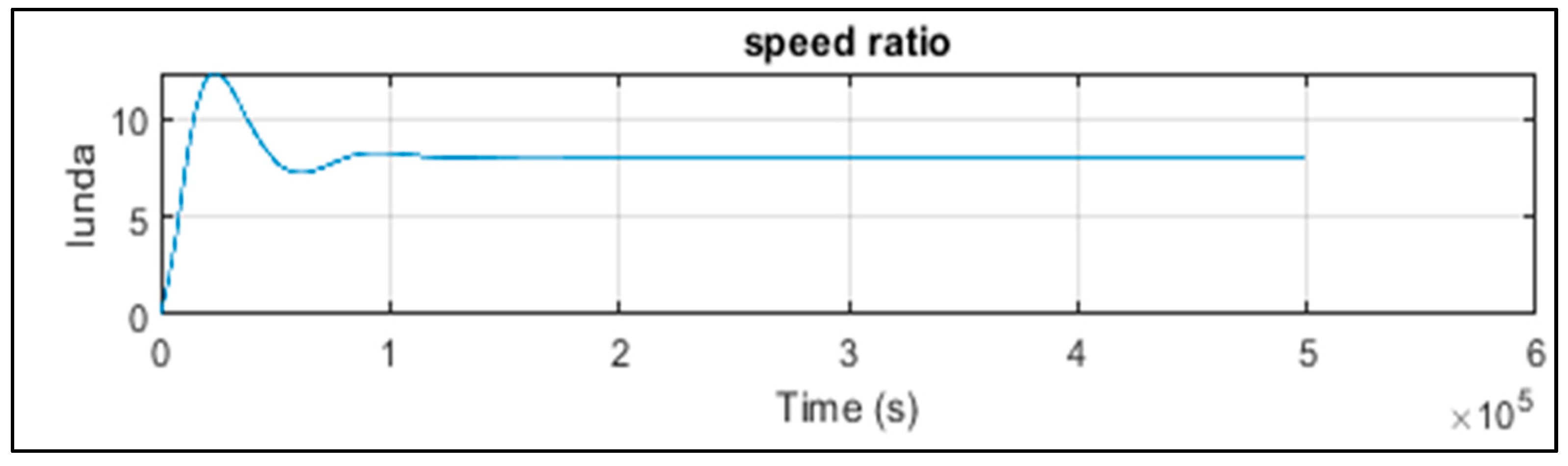
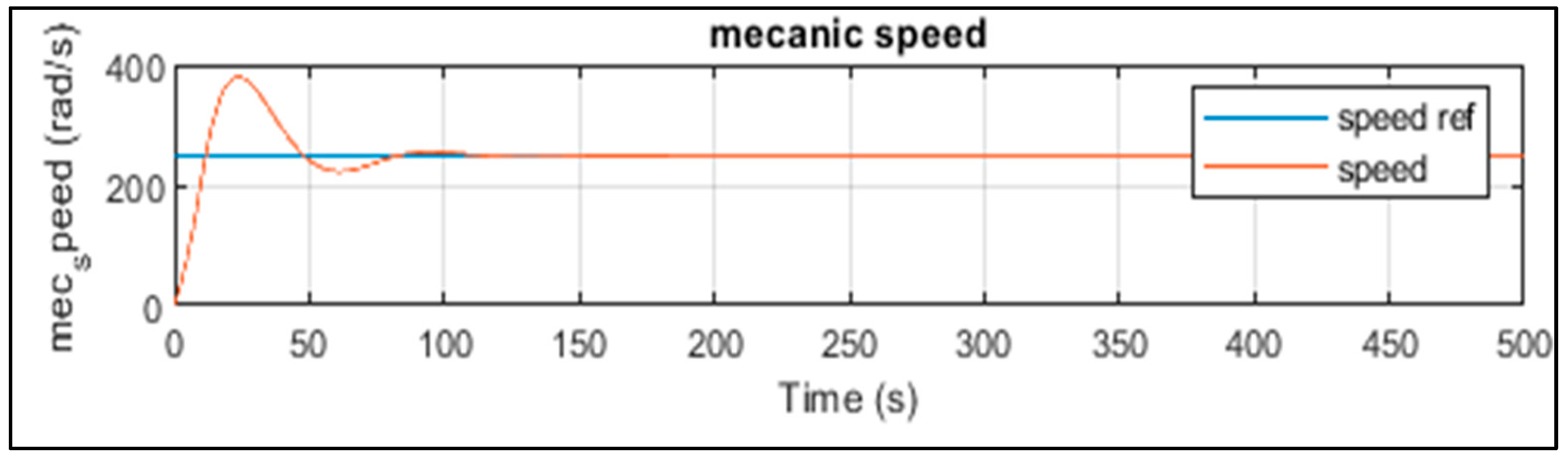
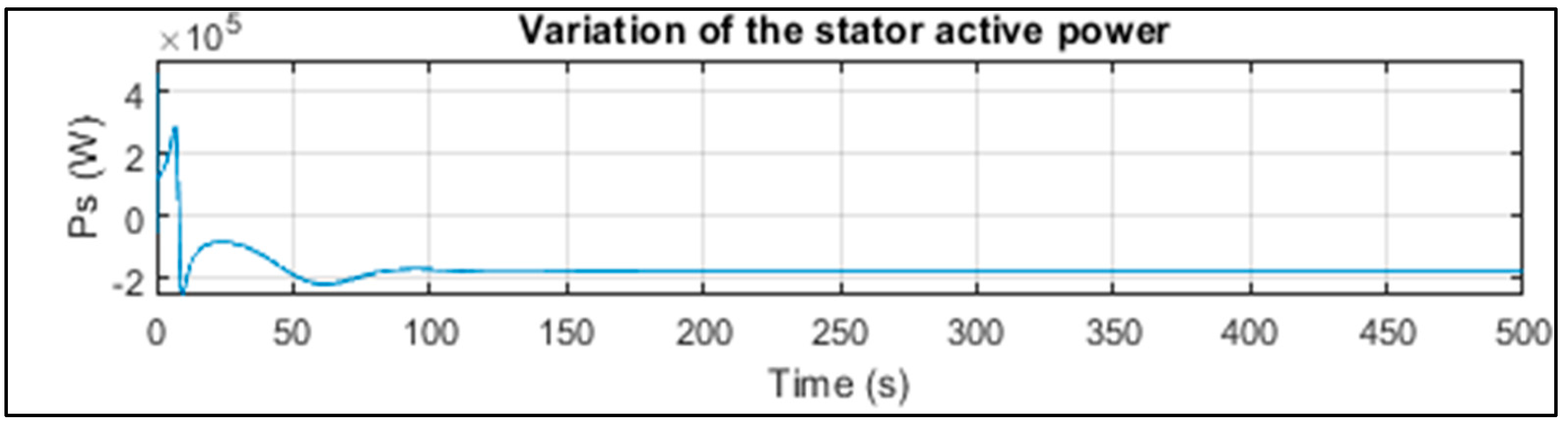
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sun, H.; Han, Y.; Zhang, L. Maximum Wind Power Tracking of Doubly Fed Wind Turbine System Based on Adaptive Gain Second-Order Sliding Mode. J. Control Sci. Eng. 2018, 2018, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Abdou, E.H.; Abdel-Raheem, Y.; Kamel, S.; Aly, M.M. Sensorless Wind Speed Control of 1.5 MW DFIG Wind Turbines for MPPT. In Proceedings of the Twentieth International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 18–20 December 2018; Cairo University: Giza, Egypt, 2018; pp. 700–704. [Google Scholar]
- Kaloi, G.S.; Wang, J.; Baloch, M.H. Active and reactive power control of the doubly fed induction generator based on wind energy conversion system. Energy Rep. 2016, 2, 194–200. [Google Scholar] [CrossRef] [Green Version]
- Yin, M.; Xu, Y.; Shen, C.; Liu, J.; Dong, Z.Y.; Zou, Y. Turbine Stability-Constrained Available Wind Power of Variable Speed Wind Turbines for Active Power Control. IEEE Trans. Power Syst. 2017, 32, 2487–2488. [Google Scholar] [CrossRef]
- Falehi, A.D.; Rafiee, M. Maximum efficiency of wind energy using novel Dynamic Voltage Restorer for DFIG based Wind Turbine. Energy Rep. 2018, 4, 308–322. [Google Scholar] [CrossRef]
- Mirecki, A. Etude Comparative de Chaînes de Conversion d’Energie Dédiées à une Eolienne de Petite Puissance. Ph.D. Thesis, Institut National Polytechnique de Toulouse, Toulouse, France, 2005; p. 252. [Google Scholar]
- Djarir, Y. Commande Directe du Couple et des Puissances d’une MADA Associée à un Système Eolien par les Techniques de L’intelligence Artificielle. Ph.D. Thesis, Université Djilali LIABES Sidi-Bel-Abbès, Sidi Bel Abbès, Algeria, 2015; p. 285. [Google Scholar]
- Modeling, Identification and Control Methods in Renewable Energy Systems; Springer Science and Business Media LLC: Marrakech, Morocco, 2019; pp. 1–374.
- Sulaiman, D.R. Multi-objective Pareto front and particle swarm optimization algorithms for power dissipation reduction in microprocessors. Int. J. Electr. Comput. Eng. (IJECE) 2020, 10, 6549–6557. [Google Scholar] [CrossRef]
- Rani, V.L.; Latha, M.M. Particle Swarm Optimization Algorithm for Leakage Power Reduction in VLSI Circuits. Int. J. Electron. Telecommun. 2016, 62, 179–186. [Google Scholar] [CrossRef]
- Izci, D.; Ekinci, S.; Demiroren, A.; Hedley, J. HHO Algorithm based PID Controller Design for Aircraft Pitch Angle Control System. In Proceedings of the International Congress on Human-Computer Interaction, Optimization and Robotic Applications (HORA), Ankara, Turkey, 26–28 June 2020; p. 6. [Google Scholar]
- Hegazy, A.E.; Makhlouf, M.A.; El-Tawel, G.S. Improved Salp Swarm Algorithm for Feature Selection. J. King Saud Univ. Comput. Inf. Sci. 2020, 32, 335–344. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle Swarm Optimization. In Proceedings of the IEEE International Joint Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; pp. 1943–1948. [Google Scholar]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris hawks optimization: Algorithm and applications. Futur. Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Gaing, Z.-L. A Particle Swarm Optimization Approach for Optimum Design of PID Controller in AVR System. IEEE Trans. Energy Convers. 2004, 19, 384–391. [Google Scholar] [CrossRef] [Green Version]
- Kose, E. Optimal Control of AVR System with Tree Seed Algorithm-Based PID Controller. IEEE Access 2020, 8, 89457–89467. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Meaning |
|---|---|
| leader position in nth dimension | |
| food source position in nth dimension | |
| upper bound of nth dimension | |
| lower bound of nth dimension | |
| r1, r2, and r3 | random variables uniformly produced in the interval of [0, 1] |
| a | current iteration |
| A | maximum number of iterations |
| position of mith follower salp in nth dimension | |
| e | time |
| initial speed |
| Algorithm | ISE | ITSE | IAE | ITAE | Error |
|---|---|---|---|---|---|
| PSO-Kp | 19.3738 | 1.5885 | 23.2340 | 0.0001 | 0.4733 |
| PSO-Ki | 0.0001 | 28.5724 | 0.0001 | 17.9310 | |
| HHO-Kp | 50 | 50 | 37.0073 | 50 | 0.0023 |
| HHO-Ki | 34.9314 | 50 | 33.8005 | 30.0855 | |
| SSA-Kp | 50 | 50 | 50 | 34.2211 | 0.0003 |
| SSA-Ki | 29.9746 | 34.9321 | 3.1388 | 31.7244 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lotfi, C.; Youcef, Z.; Marwa, A.; Schulte, H.; El-Arkam, M.; Riad, B. Optimization of a Speed Controller of a WECS with Metaheuristic Algorithms. Eng. Proc. 2023, 29, 7. https://doi.org/10.3390/engproc2023029007
Lotfi C, Youcef Z, Marwa A, Schulte H, El-Arkam M, Riad B. Optimization of a Speed Controller of a WECS with Metaheuristic Algorithms. Engineering Proceedings. 2023; 29(1):7. https://doi.org/10.3390/engproc2023029007
Chicago/Turabian StyleLotfi, Chetioui, Zennir Youcef, Arabi Marwa, Horst Schulte, Mechhoud El-Arkam, and Bendib Riad. 2023. "Optimization of a Speed Controller of a WECS with Metaheuristic Algorithms" Engineering Proceedings 29, no. 1: 7. https://doi.org/10.3390/engproc2023029007