Observer Backstepping Design for Flight Control †


Abstract
:1. Introduction
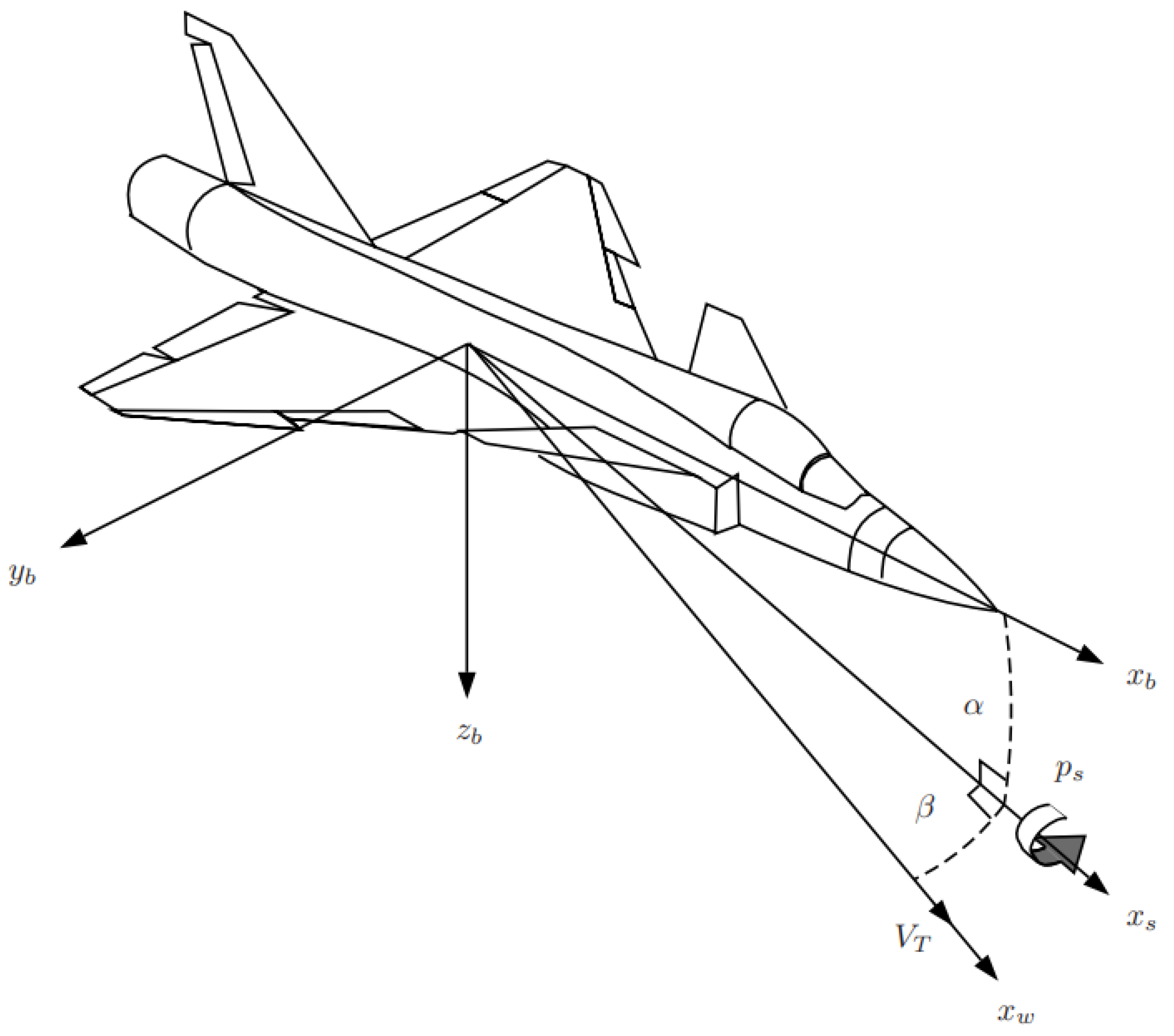
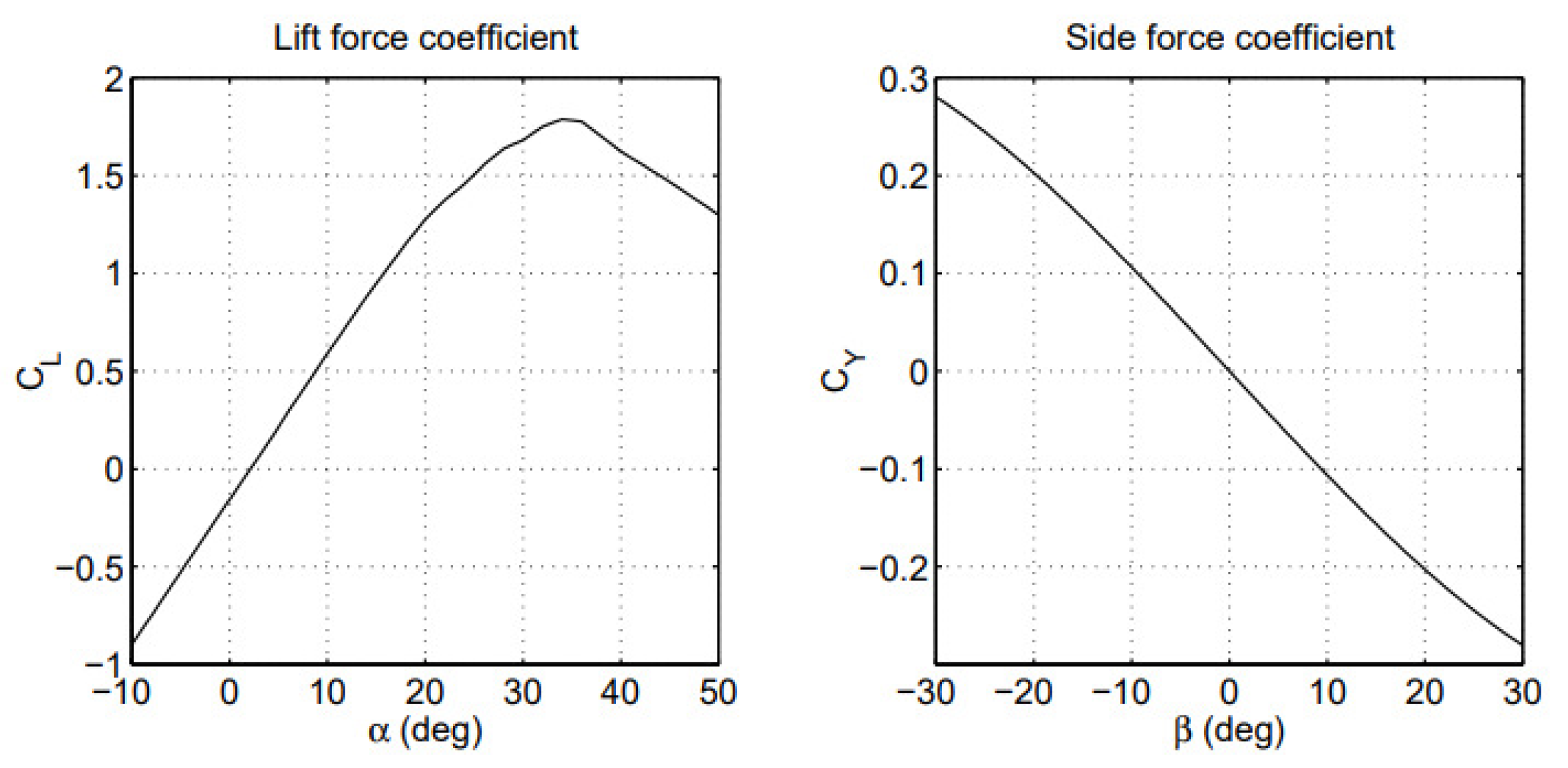
2. Aircraft Dynamics
3. Observer Backstepping Design for Flight Control
3.1. Control Objective
3.2. Control Design
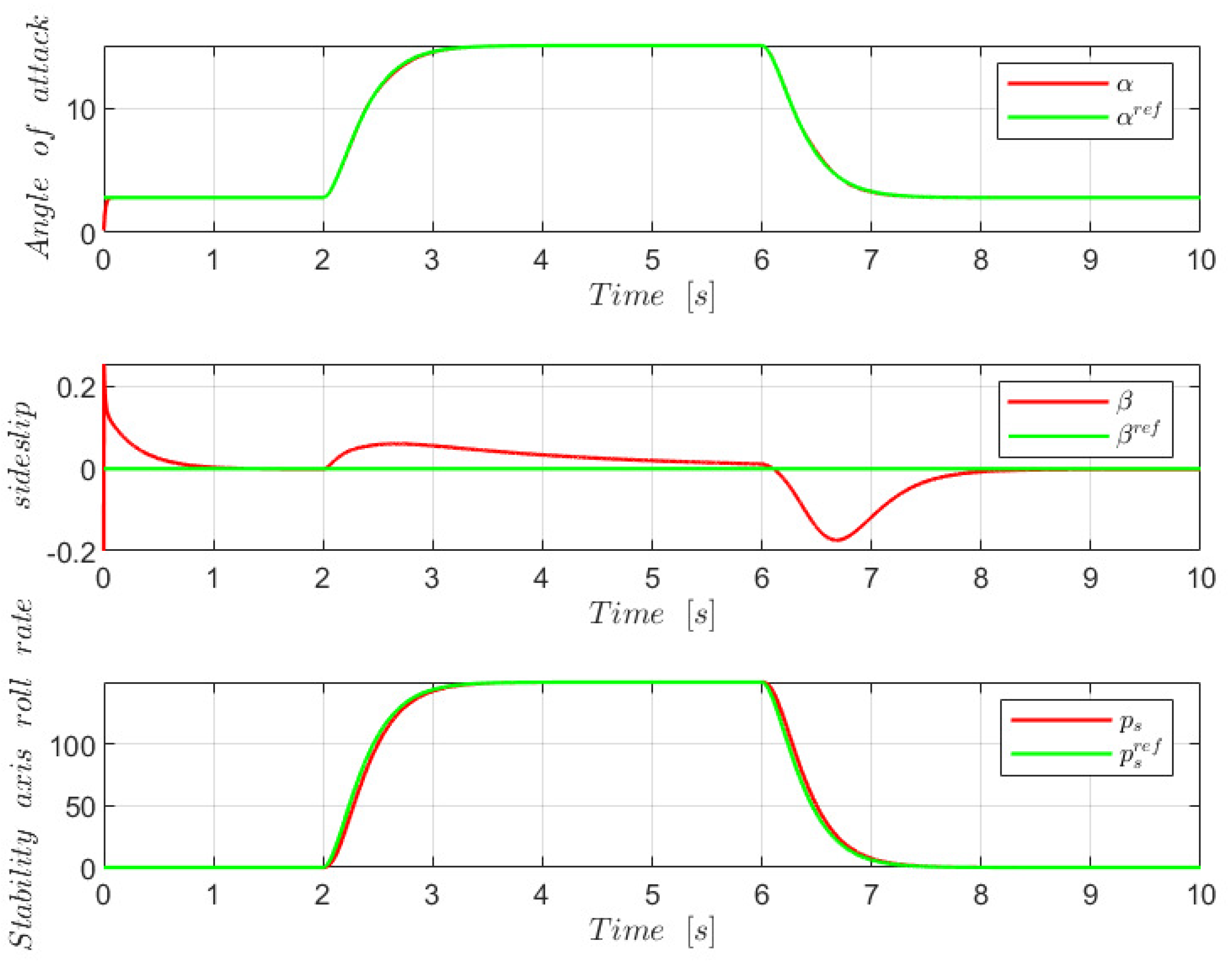
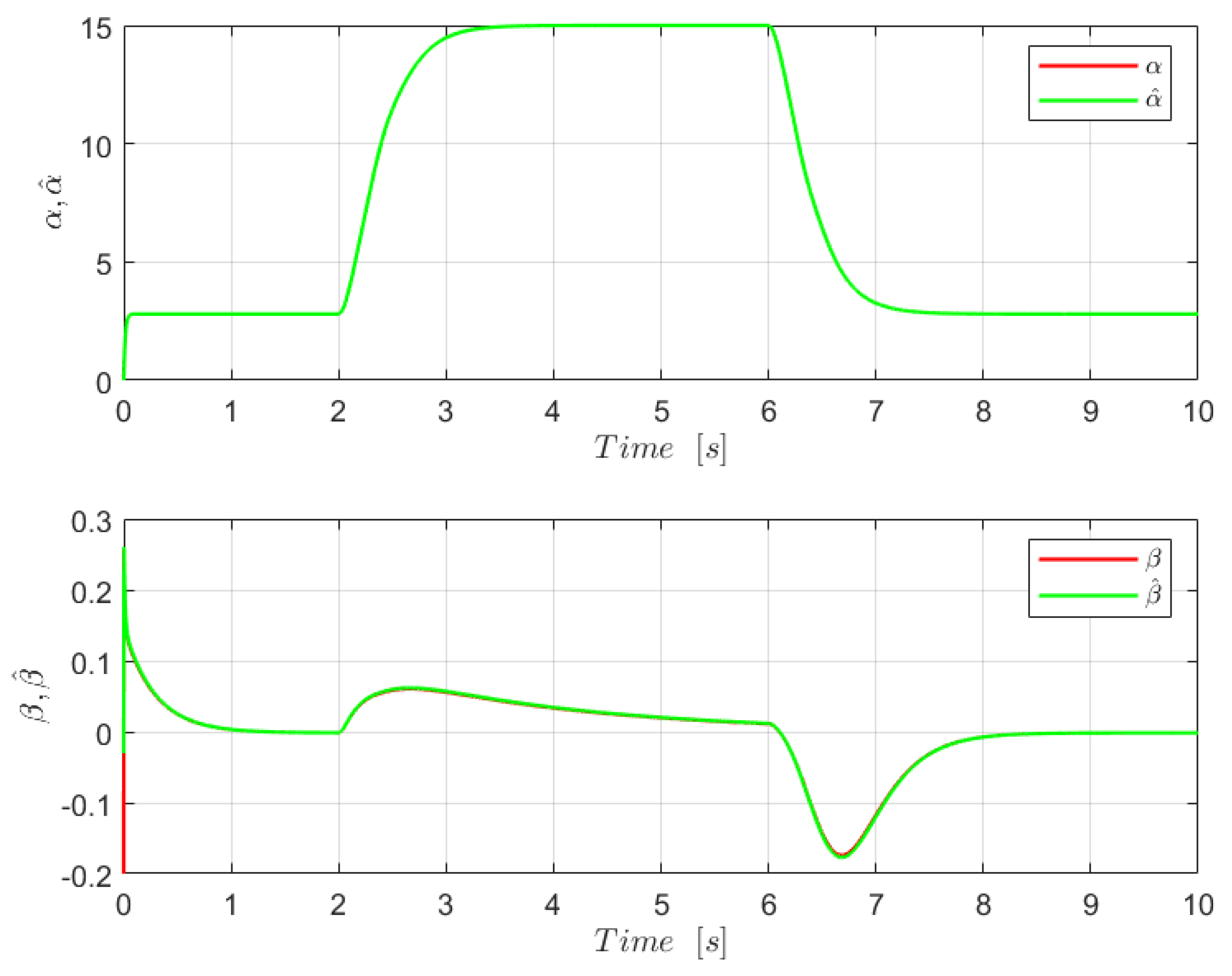
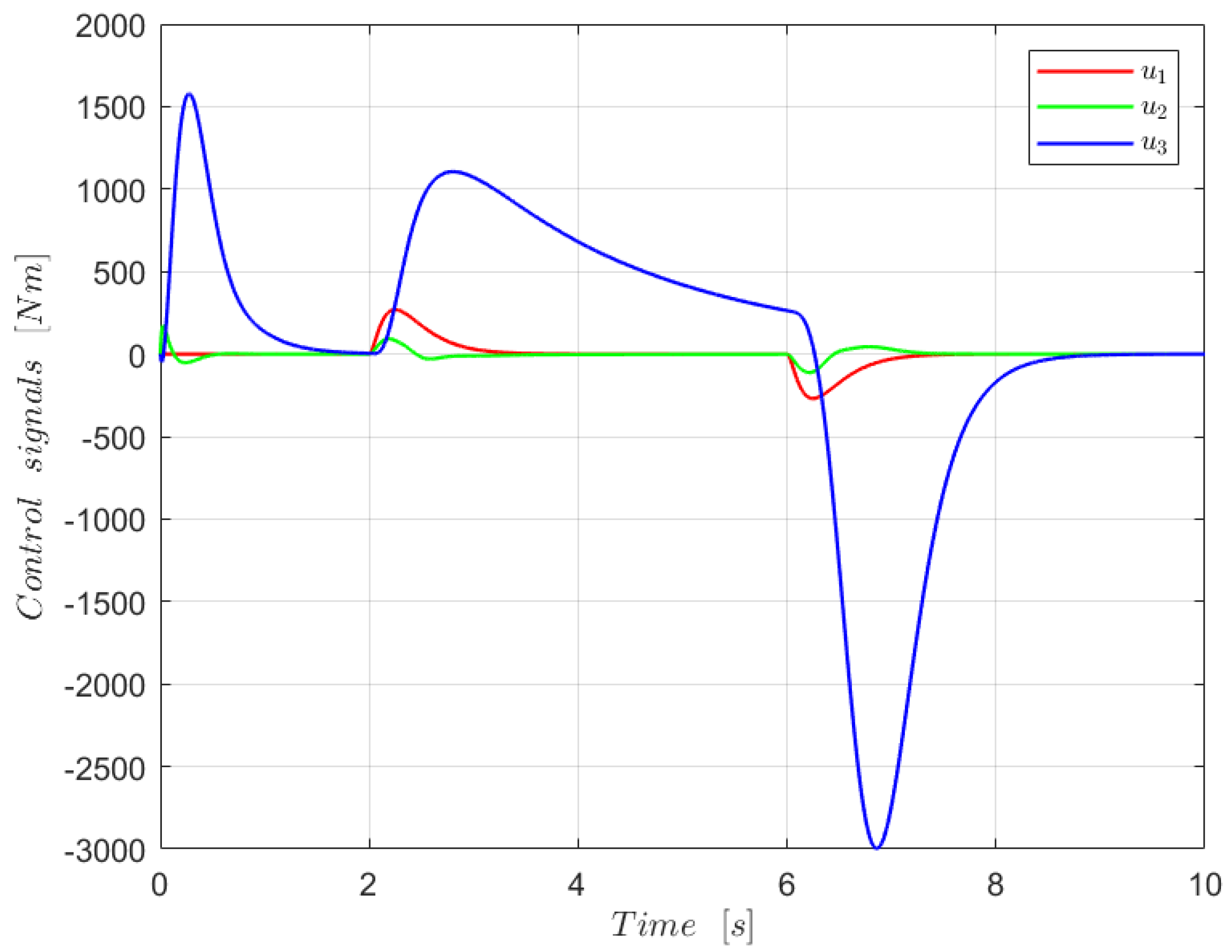
4. Simulation Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| FOC | Field-Oriented Control |
| OIB | Observed-Integrator Backstepping |
| NDM | Nonlinear Damping-Matched |
| GAM | Generic Aerodata Mode |
References
- Kokotovic, P.V. The joy of feedback: Nonlinear and adaptive. IEEE Control Syst. Mag. 1992, 12, 7–17. [Google Scholar]
- Kanellakopoulos, I.; Kokotovic, P.; Morse, A. A toolkit for nonlinear feedback design. Syst. Control Lett. 1992, 18, 83–92. [Google Scholar] [CrossRef]
- Harrouz, A.; Becheri, H.; Colak, I.; Kayisli, K. Backstepping control of a separately excited DC motor. Electr. Eng. 2018, 100, 1393–1403. [Google Scholar] [CrossRef]
- Abdulgalil, F.; Siguerdidjane, H. Backstepping design for controlling rotary drilling system. In Proceedings of the 2005 IEEE Conference on Control Applications, CCA 2005, Toronto, ON, Canada, 28–31 August 2005; pp. 120–124. [Google Scholar]
- Hu, J.; Dawson, D.; Qian, Y. Position tracking control for robot manipulators driven by induction motors without flux measurements. IEEE Trans. Robot. Autom. 1996, 12, 419–438. [Google Scholar]
- Hu, J.; Dawson, D.; Anderson, K. Position control of a brushless DC motor without velocity measurements. IEE Proc.-Electr. Power Appl. 1995, 142, 113–122. [Google Scholar] [CrossRef]
- Xiong, P.; Sun, D. Backstepping-based DPC strategy of a wind turbine-driven DFIG under normal and harmonic grid voltage. IEEE Trans. Power Electron. 2015, 31, 4216–4225. [Google Scholar] [CrossRef]
- Nadour, M.; Essaki, A.; Nasser, T. Comparative analysis between PI & backstepping control strategies of DFIG driven by wind turbine. Int. J. Renew. Energy Res. 2017, 7, 1307–1316. [Google Scholar]
- Bossoufi, B.; Karim, M.; Lagrioui, A.; Taoussi, M.; Derouich, A. Observer backstepping control of DFIG-Generators for wind turbines variable-speed: FPGA-based implementation. Renew. Energy 2015, 81, 903–917. [Google Scholar] [CrossRef]
- Kahveci, N.E.; Ioannou, P.A. Adaptive steering control for uncertain ship dynamics and stability analysis. Automatica 2013, 49, 685–697. [Google Scholar] [CrossRef]
- Strand, J.P.; Ezal, K.; Fossen, T.I.; Kokotović, P.V. Nonlinear control of ships: A locally optimal design. IFAC Proc. Vol. 1998, 31, 705–710. [Google Scholar] [CrossRef]
- Binh, N.T.; Tung, N.A.; Nam, D.P.; Quang, N.H. An adaptive backstepping trajectory tracking control of a tractor trailer wheeled mobile robot. Int. J. Control Autom. Syst. 2019, 17, 465–473. [Google Scholar] [CrossRef]
- Truong, T.N.; Vo, A.T.; Kang, H.-J. A backstepping global fast terminal sliding mode control for trajectory tracking control of industrial robotic manipulators. IEEE Access 2021, 9, 31921–31931. [Google Scholar] [CrossRef]
- Belkheiri, M.; Boudjema, F. Backstepping control augmented by neural networks for robot manipulators. In Proceedings of the AIP Conference Proceedings of First Mediterranean Conference on Intelligent Systems and Automation, American Institute of Physics, Annaba, Algeria, 30 June–2 July 2008; pp. 115–119. [Google Scholar]
- Belkheiri, M.; Boudjema, F. Neural network augmented backstepping control for an induction machine. Int. J. Model. Identif. Control 2008, 5, 288–296. [Google Scholar]
- Labbadi, M.; Cherkaoui, M. Robust adaptive backstepping fast terminal sliding mode controller for uncertain quadrotor UAV. Aerosp. Sci. Technol. 2019, 93, 105306. [Google Scholar] [CrossRef]
- Su, Z.; Wang, H.; Yao, P.; Huang, Y.; Qin, Y. Back-stepping based anti-disturbance flight controller with preview methodology for autonomous aerial refueling. Aerosp. Sci. Technol. 2017, 61, 95–108. [Google Scholar] [CrossRef]
- Singh, S.N.; Chandler, P.; Schumacher, C.; Banda, S.S.; Pachter, M. Nonlinear adaptive close formation control of unmanned aerial vehicles. Dyn. Control 2000, 10, 179–194. [Google Scholar] [CrossRef]
- Singh, S.N.; Steinberg, M. Adaptive control of feedback linearizable nonlinear systems with application to flight control. J. Guid. Control Dyn. 1996, 19, 871–877. [Google Scholar] [CrossRef]
- Steinberg, M.L.; Page, A.B. Nonlinear adaptive flight control with genetic algorithm design optimization. Int. J. Robust Nonlinear Control 1999, 9, 1097–1115. [Google Scholar] [CrossRef]
- Krstic, M.; Kokotovic, P.V.; Kanellakopoulos, I. Nonlinear and Adaptive Control Design, 1st ed.; John Wiley & Sons, Inc.: New York, NY, USA, 1 October 1995. [Google Scholar]
- Herbst, W.B. Future fighter technologies. J. Aircr. 1980, 17, 561–566. [Google Scholar] [CrossRef]
- Well, K.; Faber, B.; Berger, E. Optimization of tactical aircraft maneuvers utilizing high angles of attack. J. Guid. Control Dyn. 1982, 5, 131–137. [Google Scholar] [CrossRef]
- Stevens, B.L.; Johnson, E.N.; Lewis, F.L. Aircraft Control and Simulation; Wiley: New York, NY, USA, 1992. [Google Scholar]
- Boiffier, J.-L. The Dynamics of Flight, The Equations; Wiley: New York, NY, USA, 1998. [Google Scholar]
- Härkegård, O.; Glad, S.T. Flight control design using backstepping. IFAC Proc. Vol. 2001, 34, 283–288. [Google Scholar] [CrossRef] [Green Version]
- Marino, R.; Tomei, P. Global Adaptive Observers and Output-Feedback Stabilization for a Class of Nonlinear Systems; Springer: Berlin/Heidelberg, Germany, 1991; pp. 455–493. [Google Scholar]
- Backström, H. Report on the usage of the Generic Aerodata Model; Saab Aircraft AB: Linkoping, Sweden, 1997. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Entity | Values |
|---|---|
| Mass (m) | 9100 (kg) |
| Wing planform area (S) | 45 (m) |
| Density of the airflow () | 1.08 (kg/m) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Safinaz, B.M.; Mohammed, B.; Ahmed, B. Observer Backstepping Design for Flight Control. Eng. Proc. 2023, 29, 3. https://doi.org/10.3390/engproc2023029003
Safinaz BM, Mohammed B, Ahmed B. Observer Backstepping Design for Flight Control. Engineering Proceedings. 2023; 29(1):3. https://doi.org/10.3390/engproc2023029003
Chicago/Turabian StyleSafinaz, Ben Messaoud, Belkheiri Mohammed, and Belkheiri Ahmed. 2023. "Observer Backstepping Design for Flight Control" Engineering Proceedings 29, no. 1: 3. https://doi.org/10.3390/engproc2023029003