

Efficient Modal Identification and Optimal Sensor Placement via Dynamic DIC Measurement and Feature-Based Data Compression

Abstract
:1. Introduction
2. Modal Identification
3. Data Compression Methods
3.1. Data-Dependent Subspace Construction
3.2. Data-Independent Subspace Construction
4. Data Collection and Compression
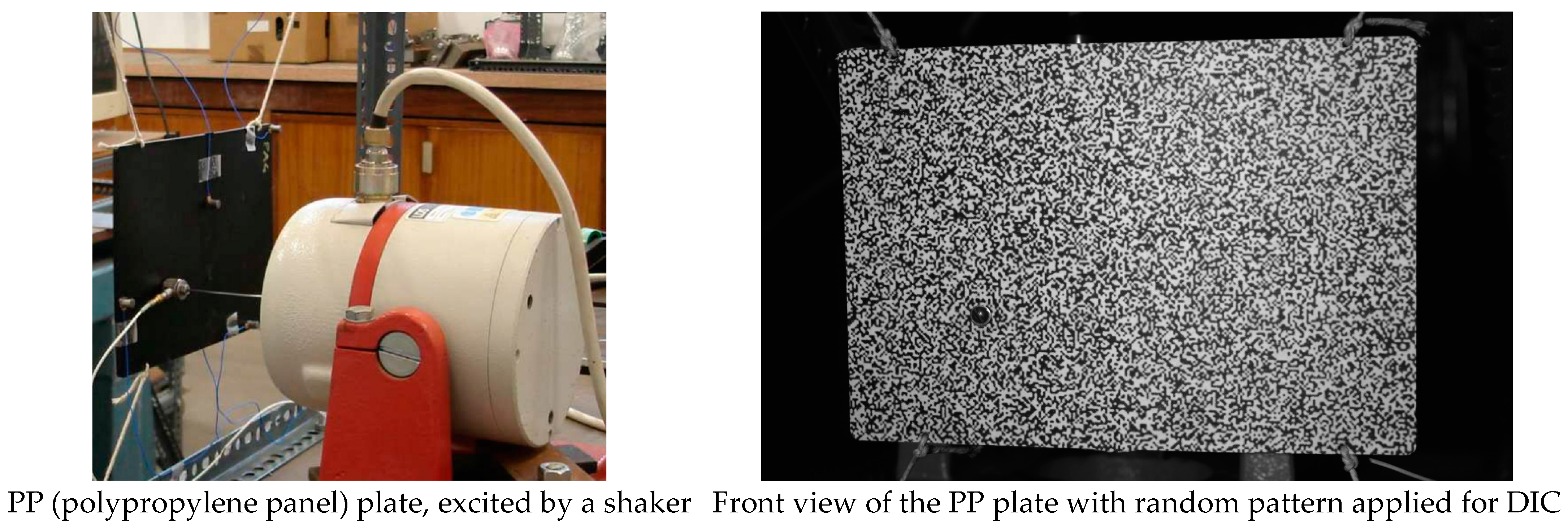
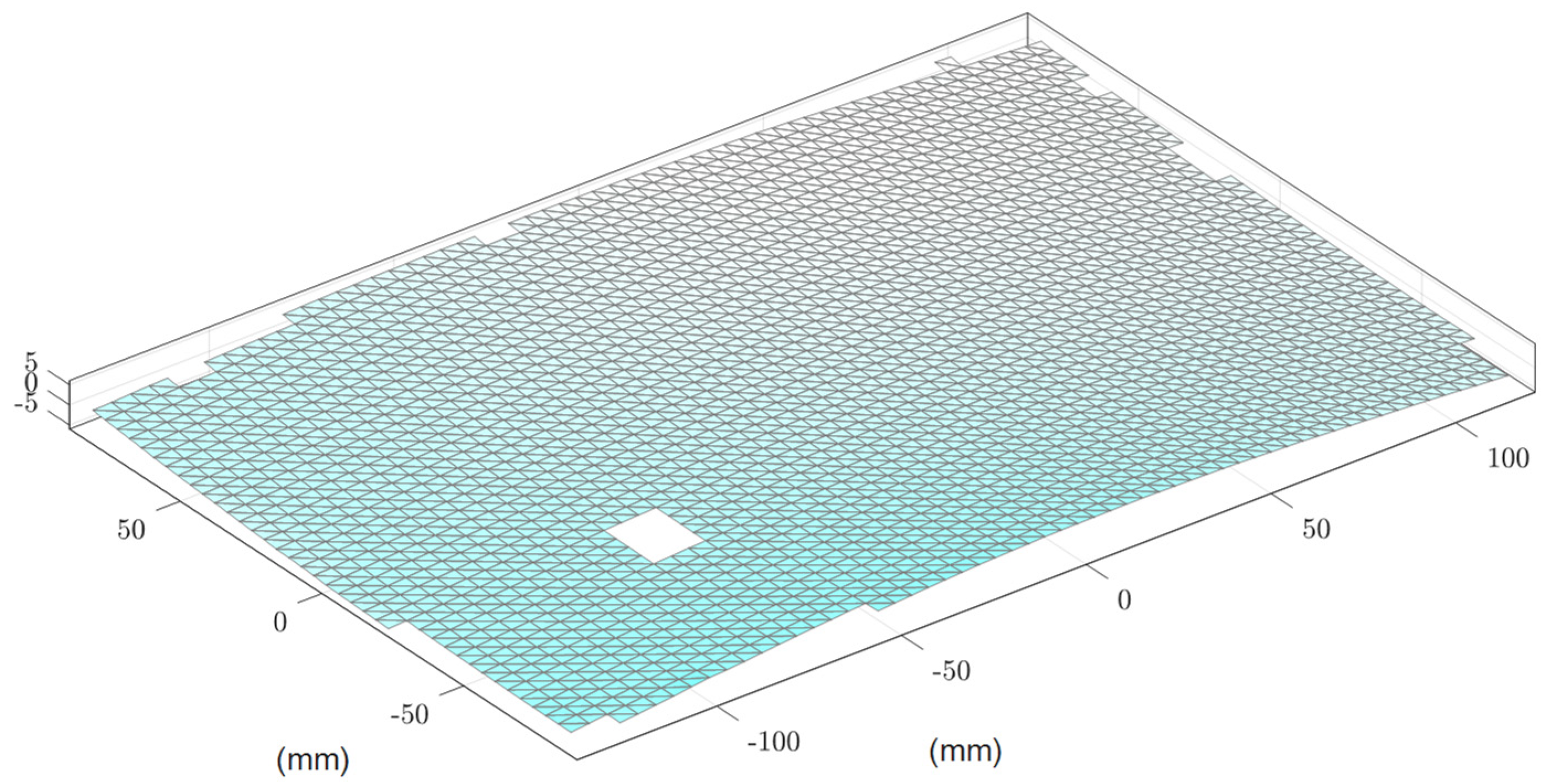
4.1. Experimental Testing Description
4.2. Data-Dependent Basis Function Construction
4.3. Data-Independent Basis Function Construction
5. Modal Identification in Feature Space and Results
5.1. Shape Feature State Space
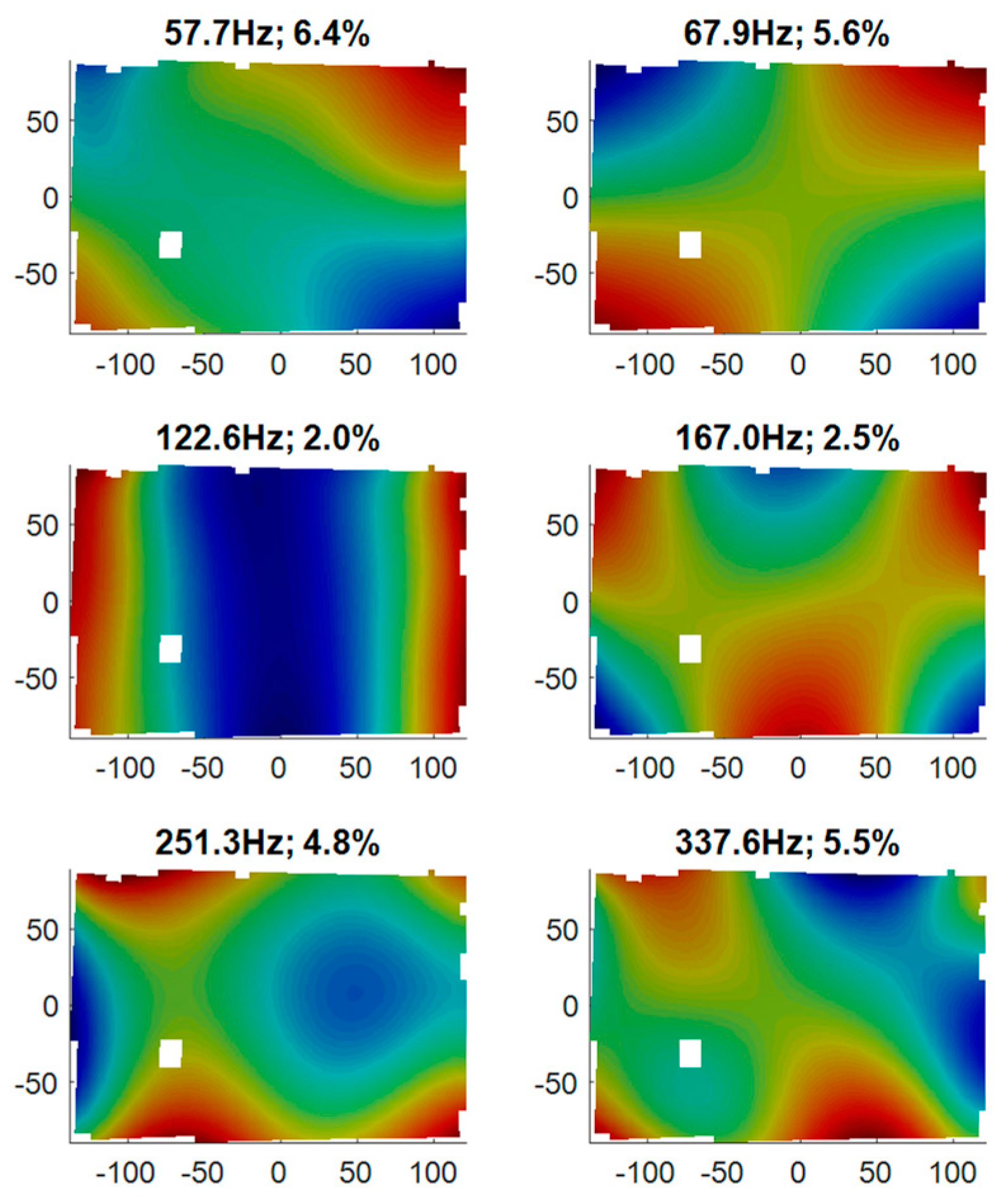
5.2. Identification Results of the Study Case
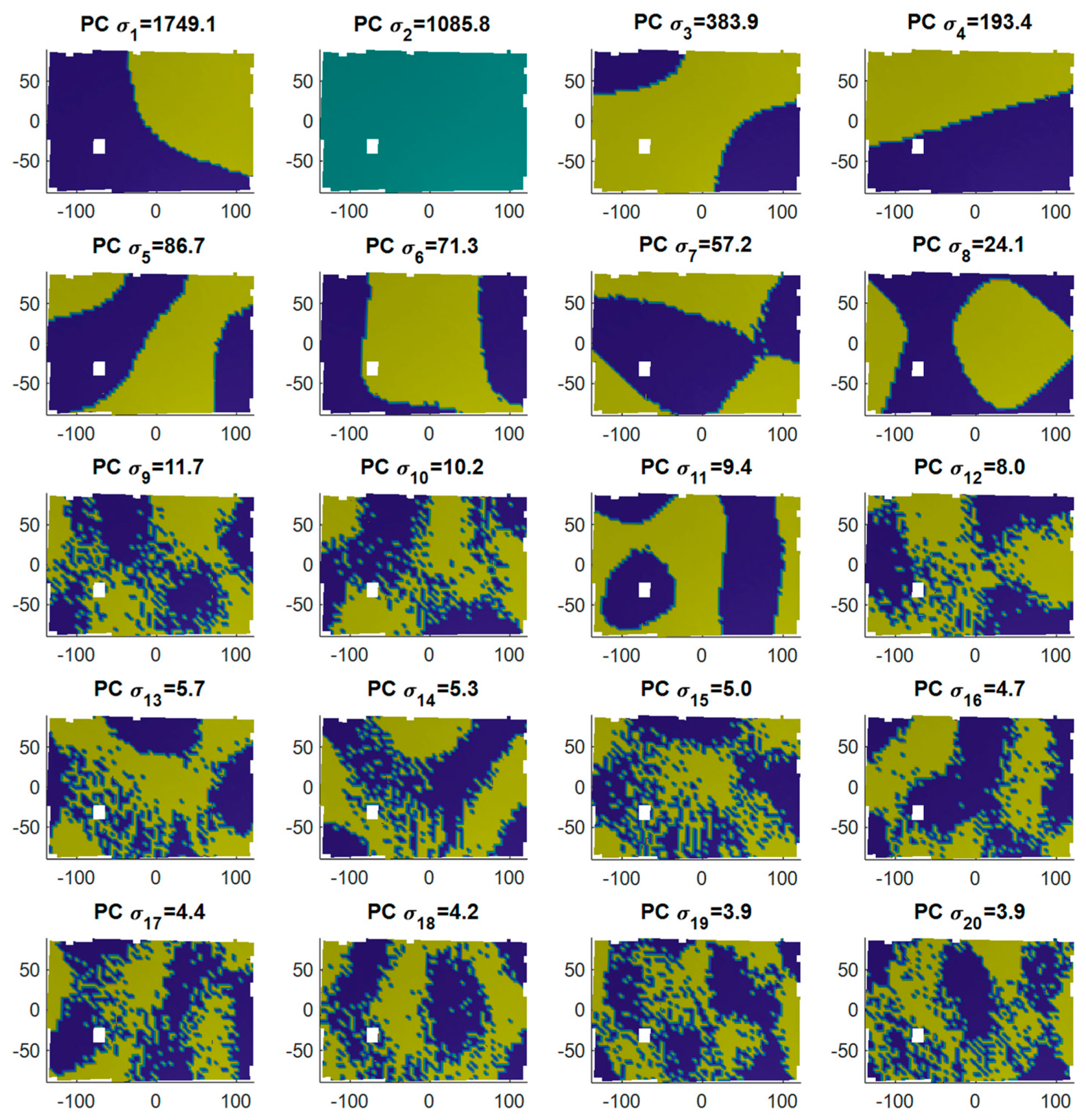
5.2.1. By PC features
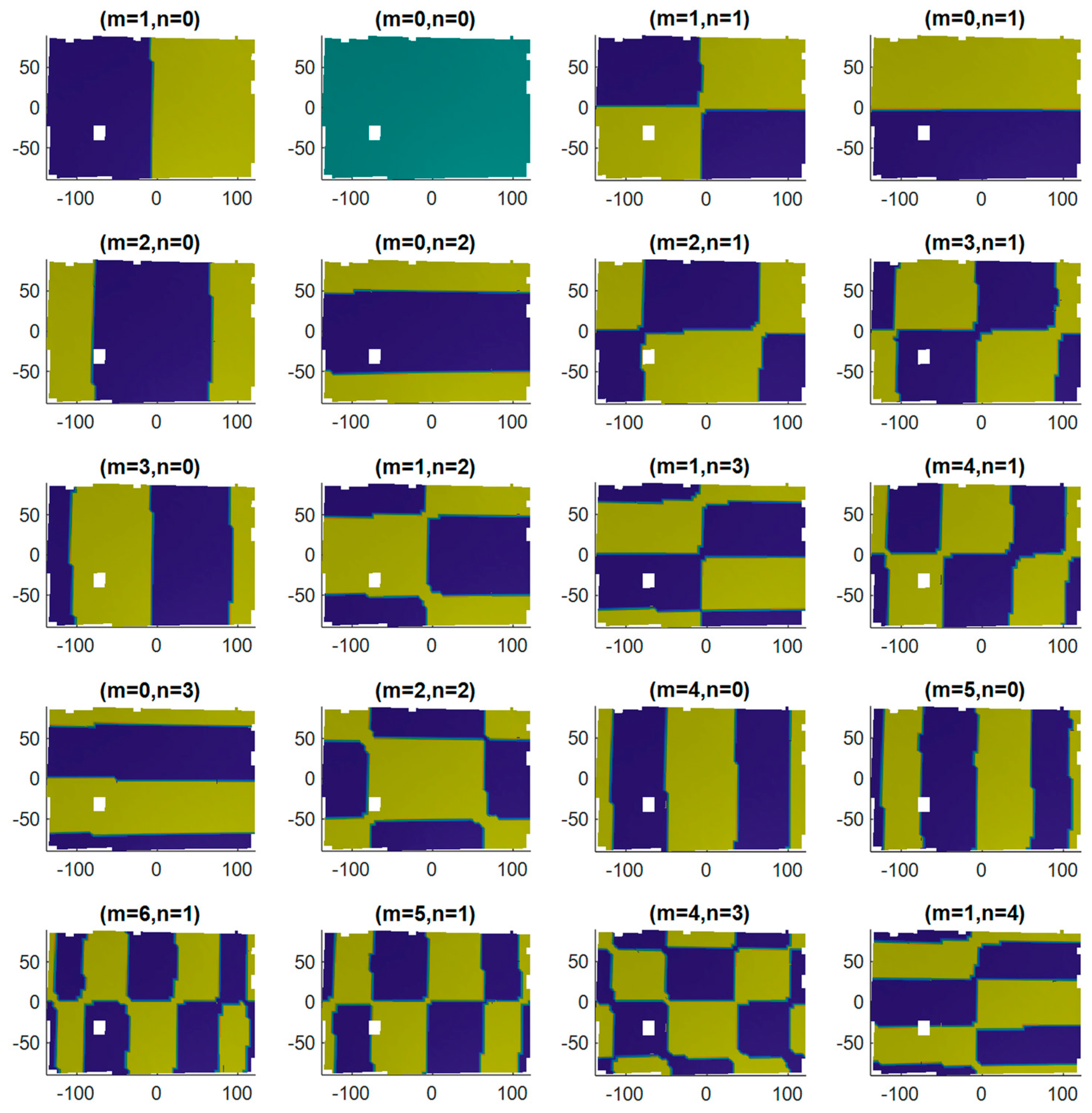
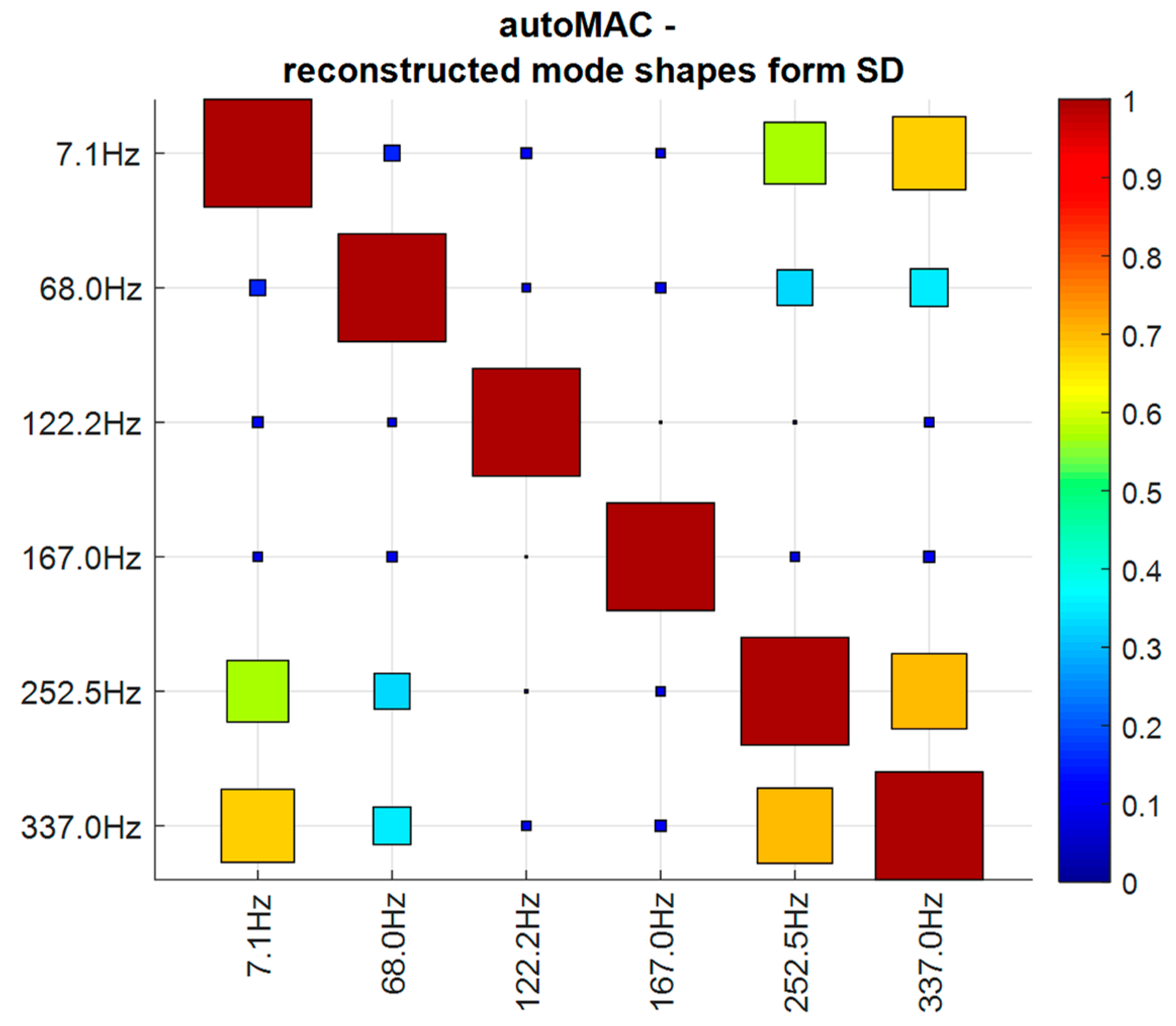
5.2.2. By AGMD Features
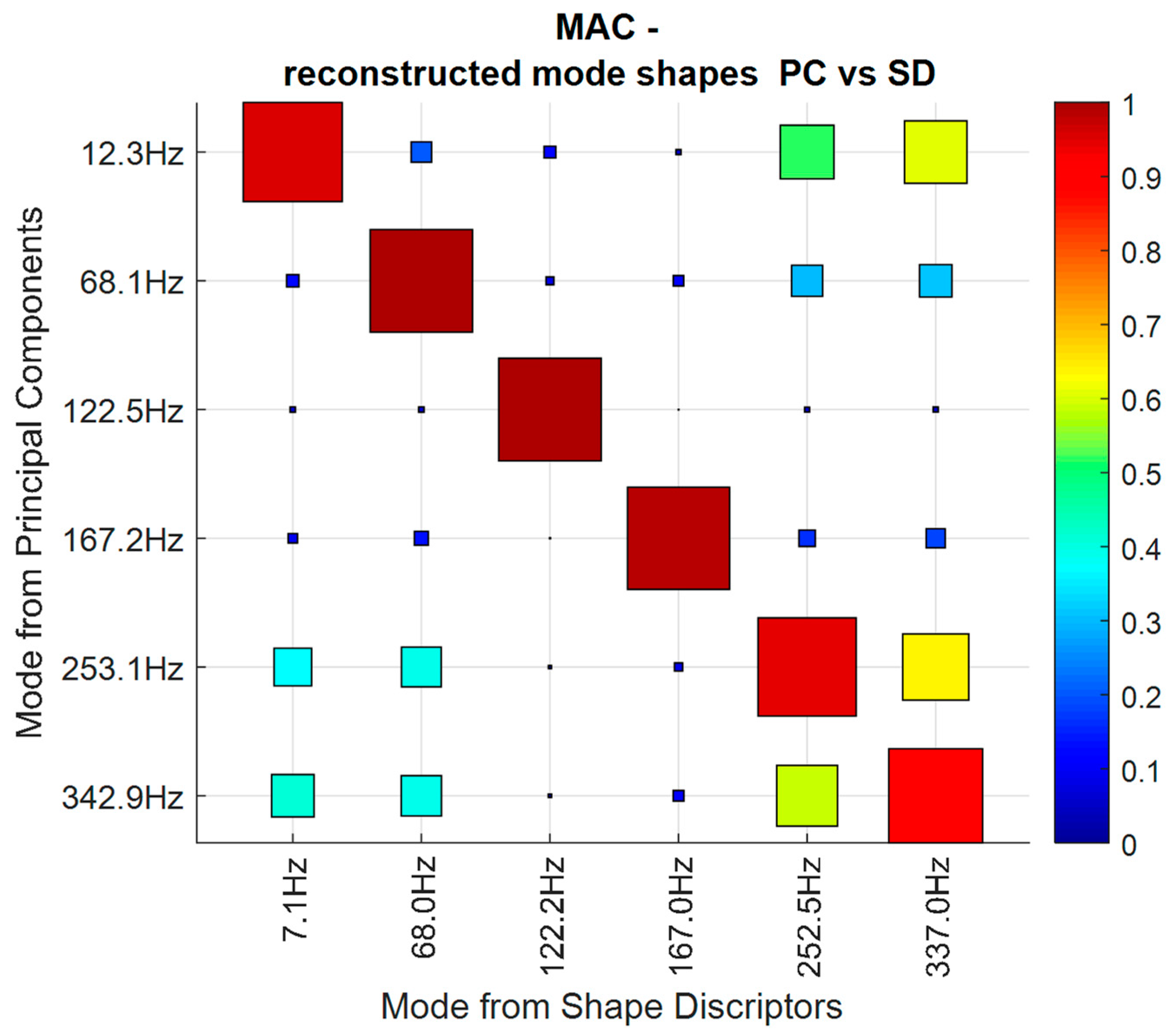
5.2.3. Comparison between the Two
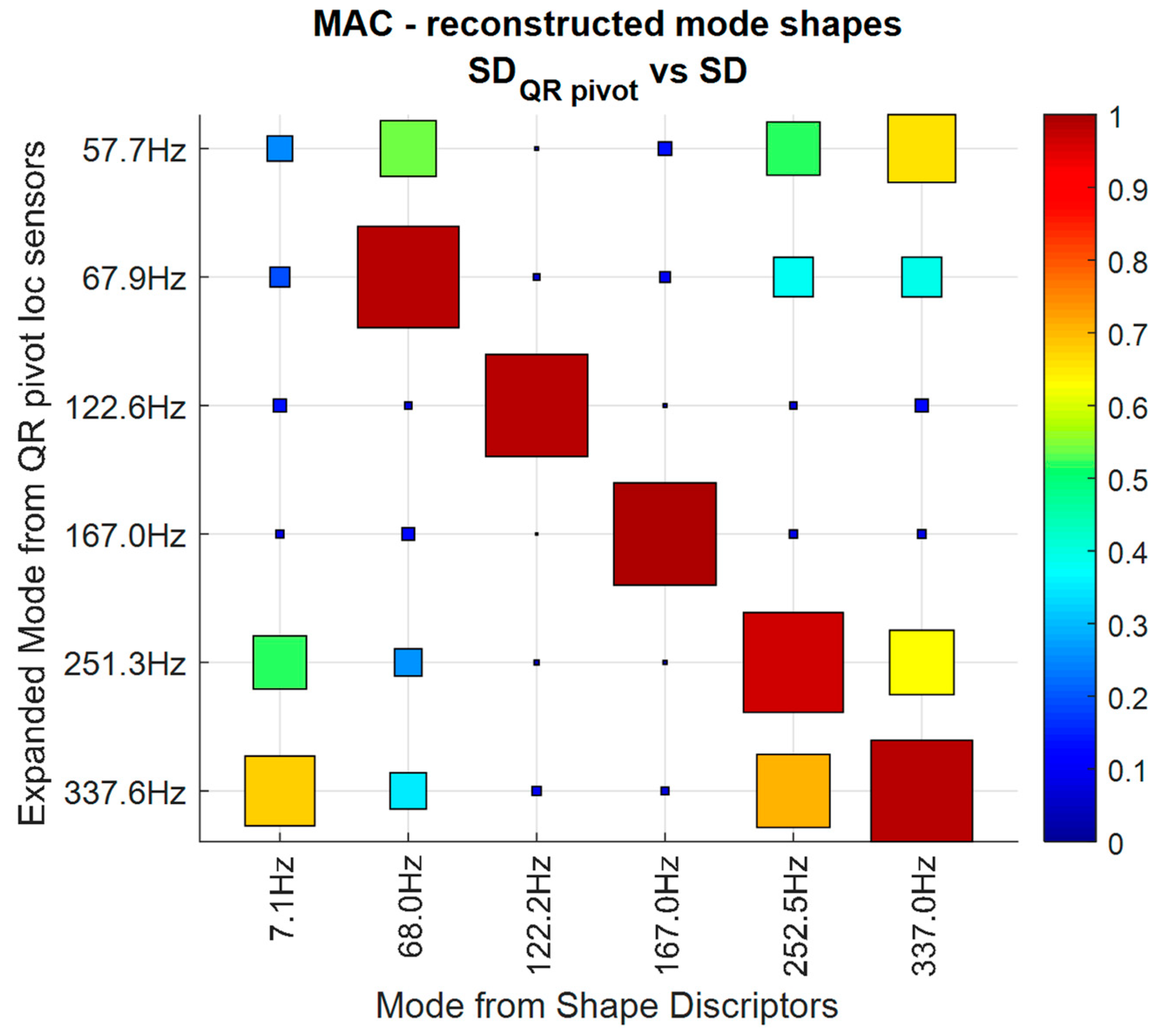
6. Mode Shape Expansion from QR-Pivot Sensors Placement
6.1. A Brief Review of Sensor Placement
6.2. Data-Driven Approach for Sensor Placement Using QR-Pivots
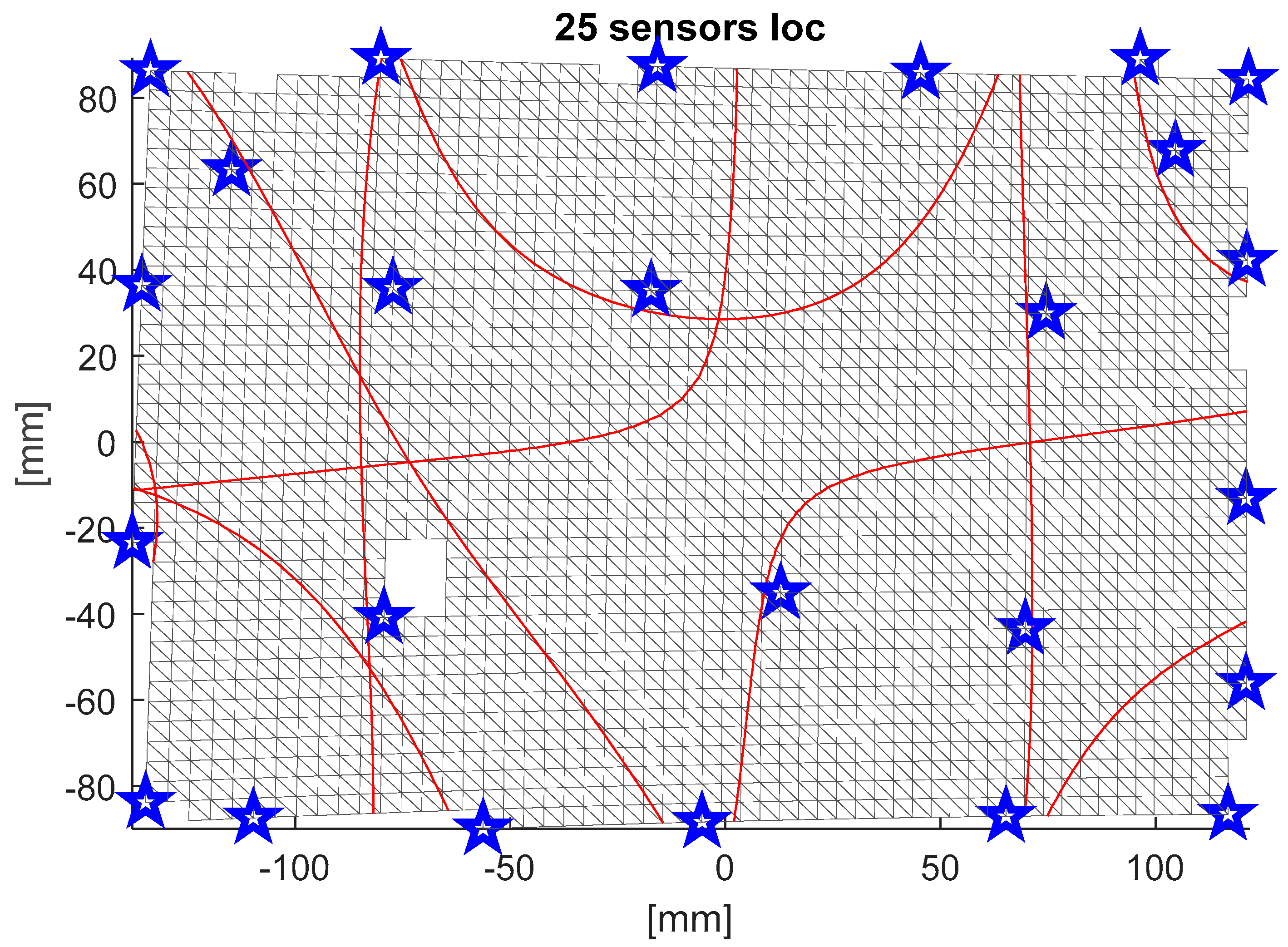
6.3. Application Example on the Plate’s Sensor Placement
7. Conclusions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ewins, D.J. Modal Testing: Theory, Practice, and Application, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2000. [Google Scholar]
- Mottershead, J.E.; Link, M.; Friswell, M.I. The sensitivity method in finite element model updating: A tutorial. Mech. Syst. Signal Process. 2010, 25, 2275–2296. [Google Scholar] [CrossRef]
- Mares, C.; Friswell, M.; Mottershead, J. Model updating using robust estimation. Mech. Syst. Signal Process. 2002, 16, 169–183. [Google Scholar] [CrossRef]
- Behmanesh, I.; Moaveni, B.; Lombaert, G.; Papadimitriou, C. Hierarchical Bayesian model updating for structural identification. Mech. Syst. Signal Process. 2015, 64–65, 360–376. [Google Scholar] [CrossRef]
- Deraemaeker, A.; Reynders, E.; De Roeck, G.; Kullaa, J. Vibration-based structural health monitoring using output-only measurements under changing environment. Mech. Syst. Signal Process. 2008, 22, 34–56. [Google Scholar] [CrossRef]
- Sohn, H.; Farrar, C.R. Damage diagnosis using time series analysis of vibration signals. Smart Mater. Struct. 2001, 10, 446–451. [Google Scholar] [CrossRef]
- Kamariotis, A.; Chatzi, E.; Straub, D. A framework for quantifying the value of vibration-based structural health monitoring. Mech. Syst. Signal Process. 2023, 184, 109708. [Google Scholar] [CrossRef]
- Farrar, C.R.; Worden, K. An introduction to structural health monitoring. Philos Trans A Math Phys Eng Sci. 2007, 365, 303–315. [Google Scholar] [CrossRef] [PubMed]
- Farrar, C.R.; Worden, K. Structural Health Monitoring: A Machine Learning Perspective; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Ren, W.-X.; De Roeck, G. Structural Damage Identification using Modal Data. I: Simulation Verification. J. Struct. Eng. 2002, 128, 87–95. [Google Scholar] [CrossRef]
- Ram, Y.M.; Mottershead, J.E. Receptance Method in Active Vibration Control. AIAA J. 2007, 45, 562–567. [Google Scholar] [CrossRef]
- Preumont, A. Vibration Control of Active Structures: An Introduction; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Mottershead, J.E.; Tehrani, M.G.; Ram, Y.M. An Introduction to the Receptance Method in Active Vibration Control. In Proceedings of the IMAC-XXVII, Orlando, FL, USA, 9–12 February 2009. [Google Scholar]
- Mottershead, J.E.; Ram, Y.M. Inverse eigenvalue problems in vibration absorption: Passive modification and active control. Mech. Syst. Signal Process. 2006, 20, 5–44. [Google Scholar] [CrossRef]
- Ram, Y.M.; Mottershead, J.E. Multiple-input active vibration control by partial pole placement using the method of receptances. Mech. Syst. Signal Process. 2013, 40, 727–735. [Google Scholar] [CrossRef]
- Tarantola, A. Inverse Problem Theory and Methods for Model Parameter Estimation; Society for Industrial and Applied Mathematics (SIAM): Philadelphia, PA, USA, 2005. [Google Scholar] [CrossRef]
- Maia, N.M.M.; Silva, J.M.M. Modal analysis identification techniques. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2001, 359, 29–40. [Google Scholar] [CrossRef]
- Peeters, B.; De Roeck, G. Stochastic System Identification for Operational Modal Analysis: A Review. J. Dyn. Syst. Meas. Control. 2001, 123, 659–667. [Google Scholar] [CrossRef]
- Peeters, B.; DE Roeck, G. Reference-based stochastic subspace identification for output-only modal analysis. Mech. Syst. Signal Process. 1999, 13, 855–878. [Google Scholar] [CrossRef]
- Reynders, E.; De Roeck, G. Reference-based combined deterministic–stochastic subspace identification for experimental and operational modal analysis. Mech. Syst. Signal Process. 2008, 22, 617–637. [Google Scholar] [CrossRef]
- Peeters, M. Theoretical and Experimental Modal Analysis of Nonlinear Vibrating Structures Using Nonlinear Normal Modes; University of Liège: Liège, Belgium, 2010; Available online: http://bictel.ulg.ac.be/ETD-db/collection/available/ULgetd-11302010-124925/ (accessed on 2 June 2013).
- Hickey, D.; Worden, K.; Platten, M.F.; Wright, J.R.; Cooper, J.E. Higher-order spectra for identification of nonlinear modal coupling. Mech. Syst. Signal Process. 2009, 23, 1037–1061. [Google Scholar] [CrossRef]
- Worden, K.; Tomlinson, G.R. Nonlinearity in Structural Dynamics: Detection, Identification, and Modelling, 1st ed.; Taylor & Francis: Bristol, UK, 2001. [Google Scholar]
- Ljung, L. State of the art in linear system identification: Time and frequency domain methods. In Proceedings of the 2004 American Control Conference, Boston, MA, USA, 30 June–2 July 2004; Volume 1, pp. 650–660. [Google Scholar] [CrossRef]
- Ljung, L. System Identification: Theory for the User, 2nd ed.; Pearson: London, UK, 1999. [Google Scholar]
- Karpel, M.; Ricci, S. Experimental modal analysis of large structures by substructuring. Mech. Syst. Signal Process. 1997, 11, 245–256. [Google Scholar] [CrossRef]
- Poncelet, F.; Kerschen, G.; Golinval, J.-C.; Verhelst, D. Output-only modal analysis using blind source separation techniques. Mech. Syst. Signal Process. 2007, 21, 2335–2358. [Google Scholar] [CrossRef]
- Chang, Y.-H.; Wang, W.; Patterson, E.A.; Chang, J.-Y.; Mottershead, J.E. Output-only full-field modal testing. Procedia Eng. 2017, 199, 423–428. [Google Scholar] [CrossRef]
- Desforges, M.; Cooper, J.; Wright, J. Spectral and modal parameter estimation from output-only measurements. Mech. Syst. Signal Process. 1995, 9, 169–186. [Google Scholar] [CrossRef]
- Brincker, R.; Zhang, L.; Andersen, P. Modal identification of output-only systems using frequency domain decomposition. Smart Mater. Struct. 2001, 10, 441–445. [Google Scholar] [CrossRef]
- Yi, J.-H.; Yun, C.-B. Comparative study on modal identification methods using output-only information. Struct. Eng. Mech. 2004, 17, 445–466. [Google Scholar] [CrossRef]
- Yang, Y.; Nagarajaiah, S. Output-only modal identification with limited sensors using sparse component analysis. J. Sound Vib. 2013, 332, 4741–4765. [Google Scholar] [CrossRef]
- Stanbridge, A.B.; Ewins, D.J. Modal testing using a scanning laser Doppler vibrometer. Mech. Syst. Signal Process. 1999, 13, 255–270. [Google Scholar] [CrossRef]
- Rothberg, S.J.; Allen, M.S.; Castellini, P.; Di Maio, D.; Dirckx, J.J.J.; Ewins, D.J.; Halkon, B.J.; Muyshondt, P.; Paone, N.; Ryan, T.; et al. An international review of laser Doppler vibrometry: Making light work of vibration measurement. Opt. Lasers Eng. 2017, 99, 11–22. [Google Scholar] [CrossRef]
- Morlier, J.; Bos, F.; Castéra, P. Diagnosis of a portal frame using advanced signal processing of laser vibrometer data. J. Sound Vib. 2006, 297, 420–431. [Google Scholar] [CrossRef]
- Siebert, T.; Becker, T.; Spiltthof, K.; Neumann, I.; Krupka, R. High-speed digital image correlation: Error estimations and applications. Opt. Eng. 2007, 46, 051004. [Google Scholar] [CrossRef]
- Reu, P.L.; Miller, T.J. The application of high-speed digital image correlation. J. Strain Anal. Eng. Des. 2008, 43, 673–688. [Google Scholar] [CrossRef]
- Siebert, T.; Crompton, M.J. Application of High Speed Digital Image Correlation for Vibration Mode Shape Analysis, Application of Imaging Techniques to Mechanics. 2013. Available online: http://link.springer.com/chapter/10.1007/978-1-4419-9796-8_37 (accessed on 2 June 2013).
- Lai, Z.; Alzugaray, I.; Chli, M.; Chatzi, E. Full-field structural monitoring using event cameras and physics-informed sparse identification. Mech. Syst. Signal Process. 2020, 145, 106905. [Google Scholar] [CrossRef]
- Na, W.-J.; Sun, K.H.; Jeon, B.C.; Lee, J.; Shin, Y.-H. Event-based micro vibration measurement using phase correlation template matching with event filter optimization. Measurement 2023, 215, 112867. [Google Scholar] [CrossRef]
- Dorn, C.; Dasari, S.; Yang, Y.; Farrar, C.; Kenyon, G.; Welch, P.; Mascareñas, D. Efficient Full-Field Vibration Measurements and Operational Modal Analysis Using Neuromorphic Event-Based Imaging. J. Eng. Mech. 2018, 144, 04018054. [Google Scholar] [CrossRef]
- Wang, W.; Mottershead, J.E.; Siebert, T.; Pipino, A. Full-field modal identification using image moment descriptors. In Proceedings of the International Conference on Noise and Vibration Engineering 2012, Leuven, Belgium, 17–19 September 2012. [Google Scholar]
- Marcuccio, G.; Bonisoli, E.; Tornincasa, S.; E Mottershead, J.; Patelli, E.; Wang, W. Image decomposition and uncertainty quantification for the assessment of manufacturing tolerances in stress analysis. J. Strain Anal. Eng. Des. 2014, 49, 618–631. [Google Scholar] [CrossRef]
- Burguete, R.L.; Lampeas, G.; E Mottershead, J.; A Patterson, E.; Pipino, A.; Siebert, T.; Wang, W. Analysis of displacement fields from a high-speed impact using shape descriptors. J. Strain Anal. Eng. Des. 2013, 49, 212–223. [Google Scholar] [CrossRef]
- Wang, W.; Mottershead, J.E.; Sebastian, C.M.; Patterson, E.A. Shape features and finite element model updating from full-field strain data. Int. J. Solids Struct. 2011, 48, 1644–1657. [Google Scholar] [CrossRef]
- Wang, W.; Mottershead, J.E.; Mares, C. Mode-shape recognition and finite element model updating using the Zernike moment descriptor. Mech. Syst. Signal Process. 2009, 23, 2088–2112. [Google Scholar] [CrossRef]
- Donoho, D.; Vetterli, M.; DeVore, R.; Daubechies, I. Data compression and harmonic analysis. IEEE Trans. Inf. Theory 1998, 44, 2435–2476. [Google Scholar] [CrossRef]
- Wang, W.; E Mottershead, J.; Mares, C. Vibration mode shape recognition using image processing. J. Sound Vib. 2009, 326, 909–938. [Google Scholar] [CrossRef]
- Tu, J.H.; Rowley, C.W.; Luchtenburg, D.M.; Brunton, S.L.; Kutz, J.N. On dynamic mode decomposition: Theory and applications. J. Comput. Dyn. 2014, 1, 391–421. [Google Scholar] [CrossRef]
- Saito, A.; Kuno, T. Data-driven experimental modal analysis by Dynamic Mode Decomposition. J. Sound Vib. 2020, 481, 115434. [Google Scholar] [CrossRef]
- Eldar, Y.; Kutyniok, G. Compressed Sensing: Theory and Applications. 2012. Available online: http://www.lavoisier.fr/livre/notice.asp?ouvrage=2580964 (accessed on 2 June 2013).
- Brunton, S.L.; Proctor, J.L.; Tu, J.H.; Kutz, J.N. Compressed sensing and dynamic mode decomposition. J. Comput. Dyn. 2015, 2, 165–191. [Google Scholar] [CrossRef]
- Rao, S. Mechanical Vibrations, 6th ed.; Pearson: London, UK, 2016. [Google Scholar]
- Ewins, D.J. Basics and state-of-the-art of modal testing. Sadhana 2000, 25, 207–220. [Google Scholar] [CrossRef]
- Farrar, C.R.; Doebling, S.W.; Nix, D.A. Vibration–based structural damage identification. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2001, 359, 131–149. [Google Scholar] [CrossRef]
- Helfrick, M.N.; Niezrecki, C.; Avitabile, P.; Schmidt, T. 3D digital image correlation methods for full-field vibration measurement. Mech. Syst. Signal Process. 2011, 25, 917–927. [Google Scholar] [CrossRef]
- Brown, D.L.; Allemang, R.J. Review of Spatial Domain Modal Parameter Estimation Procedures and Testing Methods. 2009. Available online: https://www.researchgate.net/publication/282721508_Review_of_spatial_domain_modal_parameter_estimation_procedures_and_testing_methods (accessed on 20 June 2023).
- El-Kafafy, M.; Guillaume, P.; Peeters, B. Modal parameter estimation by combining stochastic and deterministic frequency-domain approaches. Mech. Syst. Signal Process. 2013, 35, 52–68. [Google Scholar] [CrossRef]
- Ljung, L. System Identification Toolbox for Use with Matlab, The Matlab User’s Guide. 2011. Available online: https://uk.mathworks.com/help/pdf_doc/ident/ident_ug.pdf (accessed on 20 June 2023).
- Van Overschee, P.; De Moor, B. N4SID: Subspace algorithms for the identification of combined deterministic-stochastic systems. Automatica 1994, 30, 75–93. [Google Scholar] [CrossRef]
- Jamaludin, I.W.; Wahab, N.A.; Khalid, N.S.; Sahlan, S.; Ibrahim, Z.; Rahmat, M.F. N4SID and MOESP Subspace Identification Methods. In Proceedings of the IEEE 9th International Colloquium on Signal Processing and Its Applications, Kuala Lumpur, Malaysia, 8–10 March 2013. [Google Scholar]
- Baraniuk, R.G. Compressive Sensing [Lecture Notes]. IEEE Signal Process. Mag. 2007, 24, 118–121. [Google Scholar] [CrossRef]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Elad, M. Optimized Projections for Compressed Sensing. IEEE Trans. Signal Process. 2007, 55, 5695–5702. [Google Scholar] [CrossRef]
- Kutyniok, G. Theory and applications of compressed sensing. GAMM-Mitteilungen 2013, 36, 79–101. [Google Scholar] [CrossRef]
- Candès, E.J.; Eldar, Y.C.; Needell, D.; Randall, P. Compressed sensing with coherent and redundant dictionaries. Appl. Comput. Harmon. Anal. 2011, 31, 59–73. [Google Scholar] [CrossRef]
- Cohen, A.; Dahmen, W.; DeVore, R. Compressed sensing and best k-term approximation, American Mathematical Society. 2009, pp. 211–231. Available online: http://www.ams.org/jams/2009-22-01/S0894-0347-08-00610-3/S0894-0347-08-00610-3.pdf (accessed on 23 August 2011).
- Burq, N.; Dyatlov, S.; Ward, R.; Zworski, M. Weighted Eigenfunction Estimates with Applications to Compressed Sensing. SIAM J. Math. Anal. 2012, 44, 3481–3501. [Google Scholar] [CrossRef]
- Elad, M. Sparse and Redundant Representations: From Theory to Applications in Signal and Image Processing; Springer: Berlin/Heidelberg, Germany, 2010; Available online: http://books.google.com/books?hl=en&lr=&id=d5b6lJI9BvAC&oi=fnd&pg=PR10&dq=Sparse+and+Redundant+Representations:+From+Theory+to+Applications+in+Signal+and+Image+Processing&ots=0O6zI8mY_-&sig=6pIB-KDqz15uoe4aBQV0S_n0Cko (accessed on 19 January 2012).
- Aharon, M.; Elad, M.; Bruckstein, A. K-SVD: An Algorithm for Designing Overcomplete Dictionaries for Sparse Representation. IEEE Trans. Signal Process. 2006, 54, 4311–4322. [Google Scholar] [CrossRef]
- Wang, W.; Mottershead, J.E.; Siebert, T.; Pipino, A. Frequency response functions of shape features from full-field vibration measurements using digital image correlation. Mech. Syst. Signal Process. 2011, 28, 333–347. [Google Scholar] [CrossRef]
- Aurenhammer, F. Voronoi diagrams—A survey of a fundamental geometric data structure. ACM Comput. Surv. 1991, 23, 345–405. [Google Scholar] [CrossRef]
- Loutas, T.; Bourikas, A. Strain sensors optimal placement for vibration-based structural health monitoring. The effect of damage on the initially optimal configuration. J. Sound Vib. 2017, 410, 217–230. [Google Scholar] [CrossRef]
- Tchemodanova, S.P.; Sanayei, M.; Moaveni, B.; Tatsis, K.; Chatzi, E. Strain predictions at unmeasured locations of a substructure using sparse response-only vibration measurements. J. Civ. Struct. Health Monit. 2021, 11, 1113–1136. [Google Scholar] [CrossRef]
- Jaya, M.M.; Ceravolo, R.; Fragonara, L.Z.; Matta, E. An optimal sensor placement strategy for reliable expansion of mode shapes under measurement noise and modelling error. J. Sound Vib. 2020, 487, 115511. [Google Scholar] [CrossRef]
- Tarpø, M.; Nabuco, B.; Georgakis, C.; Brincker, R. Expansion of experimental mode shape from operational modal analysis and virtual sensing for fatigue analysis using the modal expansion method. Int. J. Fatigue 2020, 130, 105280. [Google Scholar] [CrossRef]
- Tarpø, M.; Friis, T.; Georgakis, C.; Brincker, R. Full-field strain estimation of subsystems within time-varying and nonlinear systems using modal expansion. Mech. Syst. Signal Process. 2021, 153, 107505. [Google Scholar] [CrossRef]
- Baqersad, J.; Bharadwaj, K. Strain expansion-reduction approach. Mech. Syst. Signal Process. 2018, 101, 156–167. [Google Scholar] [CrossRef]
- Kammer, D.C. Sensor placement for on-orbit modal identification and correlation of large space structures. J. Guid. Control Dyn. 1991, 14, 251–259. [Google Scholar] [CrossRef]
- Kammer, D.C. Effects of Noise on Sensor Placement for On-Orbit Modal Identification of Large Space Structures. J. Dyn. Syst. Meas. Control. 1992, 114, 436–443. [Google Scholar] [CrossRef]
- Kammer, D.C. Sensor set expansion for modal vibration testing. Mech. Syst. Signal Process. 2005, 19, 700–713. [Google Scholar] [CrossRef]
- Barthorpe, R.J.; Worden, K. Sensor Placement Optimization. Encycl. Struct. Health Monit. 2009. [Google Scholar] [CrossRef]
- Yi, T.-H.; Huang, H.-B.; Li, H.-N. Development of sensor validation methodologies for structural health monitoring: A comprehensive review. Measurement 2017, 109, 200–214. [Google Scholar] [CrossRef]
- Sun, H.; Büyüköztürk, O. Optimal sensor placement in structural health monitoring using discrete optimization. Smart Mater. Struct. 2015, 24, 125034. [Google Scholar] [CrossRef]
- Ercan, T.; Papadimitriou, C. Bayesian optimal sensor placement for parameter estimation under modeling and input uncertainties. J. Sound Vib. 2023, 563, 117844. [Google Scholar] [CrossRef]
- Zhang, J.; Maes, K.; De Roeck, G.; Reynders, E.; Papadimitriou, C.; Lombaert, G. Optimal sensor placement for multi-setup modal analysis of structures. J. Sound Vib. 2017, 401, 214–232. [Google Scholar] [CrossRef]
- Papadimitriou, C.; Beck, J.L.; Au, S.-K. Entropy-Based Optimal Sensor Location for Structural Model Updating. J. Vib. Control. 2000, 6, 781–800. [Google Scholar] [CrossRef]
- Papadimitriou, C. Optimal sensor placement methodology for parametric identification of structural systems. J. Sound Vib. 2004, 278, 923–947. [Google Scholar] [CrossRef]
- Chang, Y.-H.; Wang, W.; Chang, J.-Y.; E Mottershead, J. Compressed sensing for OMA using full-field vibration images. Mech. Syst. Signal Process. 2019, 129, 394–406. [Google Scholar] [CrossRef]
- Zibulevsky, M.; Elad, M. L1-L2 Optimization in Signal and Image Processing. IEEE Signal Process. Mag. 2010, 27, 76–88. [Google Scholar] [CrossRef]
- Elad, M.; Bruckstein, A. A generalized uncertainty principle and sparse representation in pairs of bases. IEEE Trans. Inf. Theory 2002, 48, 2558–2567. [Google Scholar] [CrossRef]
- Manohar, K.; Brunton, B.W.; Kutz, J.N.; Brunton, S.L. Data-Driven Sparse Sensor Placement for Reconstruction: Demonstrating the Benefits of Exploiting Known Patterns. IEEE Control Syst. 2018, 38, 63–86. [Google Scholar] [CrossRef]
- Drmač, Z.; Gugercin, S. A New Selection Operator for the Discrete Empirical Interpolation Method---Improved A Priori Error Bound and Extensions. SIAM J. Sci. Comput. 2016, 38, A631–A648. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # | 20PCs | 25AGMDs | Diff. | Diff. |
|---|---|---|---|---|
| Hz | Hz | Hz | % | |
| 1 | 12.3 | 7.1 | 5.2 | 53.61% |
| 2 | 68.1 | 68.0 | 0.1 | 0.15% |
| 3 | 122.5 | 122.2 | 0.3 | 0.25% |
| 4 | 167.2 | 167.0 | 0.2 | 0.12% |
| 5 | 253.1 | 252.5 | 0.6 | 0.24% |
| 6 | 342.9 | 337.0 | 5.9 | 1.74% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, W. Efficient Modal Identification and Optimal Sensor Placement via Dynamic DIC Measurement and Feature-Based Data Compression. Vibration 2023, 6, 820-842. https://doi.org/10.3390/vibration6040050
Wang W. Efficient Modal Identification and Optimal Sensor Placement via Dynamic DIC Measurement and Feature-Based Data Compression. Vibration. 2023; 6(4):820-842. https://doi.org/10.3390/vibration6040050
Chicago/Turabian StyleWang, Weizhuo. 2023. "Efficient Modal Identification and Optimal Sensor Placement via Dynamic DIC Measurement and Feature-Based Data Compression" Vibration 6, no. 4: 820-842. https://doi.org/10.3390/vibration6040050