1. Introduction
In-flight icing poses a significant threat to flight safety and can result in fatal accidents. The effects of ice accretion on wings and control surfaces can greatly reduce lift and increase drag forces, and may even cause structural imbalances [
1]. This will lead to a decrease in flight stability and controllability [
2]. Statistic data from American Safety Advisor showed that 12% of all weather-resulted accidents were caused by icing and 92% of the ice-induced accidents were in-flight icing [
3].
To mitigate the risks of in-flight icing, two main approaches are currently used in practice. The first approach provides pilots with detailed weather information before the flight mission to avoid potential icing conditions. The second approach relies on classical icing protection systems (IPSs) which employ deicing and anti-icing methods to remove or inhibit ice accretion, respectively [
4]. Various deicing methods have been incorporated into IPSs, including bleeding hot engine exhaust to counteract frigid icing conditions and using inflatable boots to break off the accumulated ice. Chemical reagents have been considered as an effective anti-icing method in recent years [
5]. Despite the implementation of various engineering measures, accidents resulting from in-flight icing continue to occur. In October 1994, an accident involving American Eagle ATR-72 near Roselawn, Indiana, resulted in the death of 68 individuals [
6]. Similarly, China Eastern Airlines Flight 5210 (CRJ-200) crashed after takeoff in Baotou City in November 2004 and left 55 dead. In 2009, Air France Flight 447 (A330) crashed over the Atlantic Ocean; all the passengers on board were lost [
7,
8]. These accidents highlight the inadequacy of relying solely on IPS for ensuring flight safety. A four-year tailplane icing program (TIP) was then cosponsored by NASA and FAA after the ATR-72 accident [
9], which led to the proposal of the icing management system (IMS) by Bragg et al. [
10]. An IMS firstly takes into account the deterioration of aerodynamic derivatives and can automatically activate the traditional IPS devices. It also introduces a configuration into the flight control laws to restrict the maneuver within a proper margin of safety.
For HALE-UAVs, ice accretion occurs during the climb stage of flight, particularly below 25,000 feet altitude. These aircraft often fly through areas with high humidity or sufficient water content in the clouds, which are naturally icing high-risk regions or strong icing conditions [
11]. For these aircraft, the IPS cannot be activated by a human pilot, it only relies on the IMS. Inspired by Bragg, recent research on HALE-UAV icing has primarily focused on two key areas. The first area involves online estimation of the effects of icing accretion [
12], while the second area involves developing an ice-tolerant control law. Since the icing effects can be considered as a part of the modeling error in many ways, the use of fault-tolerant control (FTC) can bring better results [
13]. Jiang and Yu divided FTC into passive and active types and gave their comparison results [
14]. Passive approaches such as robust control are relatively easy to implement, but can only handle limited faults. On the other hand, active approaches perform better when dealing with various faults, and a lot of research was therefore conducted on it [
15,
16,
17,
18,
19,
20,
21,
22,
23,
24]. Ru proposed a multiple model control method that utilizes a finite set of linear models to express the system in different conditions [
16]. Additionally, an online processor that determines which model to use based on Kalman filters was also employed. Furthermore, Verhaegen et al. discussed three typical multiple model controllers [
17], but the oscillation problem in model switching still needs further improvements. Shtessel constructed a two-loop cascade structure of sliding mode control (SMC) by using standard sliding mode functions [
18]. It is theoretically able to handle all structural errors less than the prior-assumed uncertainty, although limitations still exist. For instance, there must be one, and only one, control surface for every controlled variable, and we can never afford to lose it [
17]. With the enhancement of hardware computing power in recent years, model-predictive control (MPC) has become more popular. It can effectively control a multi-input multi-output (MIMO) system with constraints as long as a reference model exists [
19]. However, obtaining an accurate system without modeling errors remains a critical challenge for MPC.
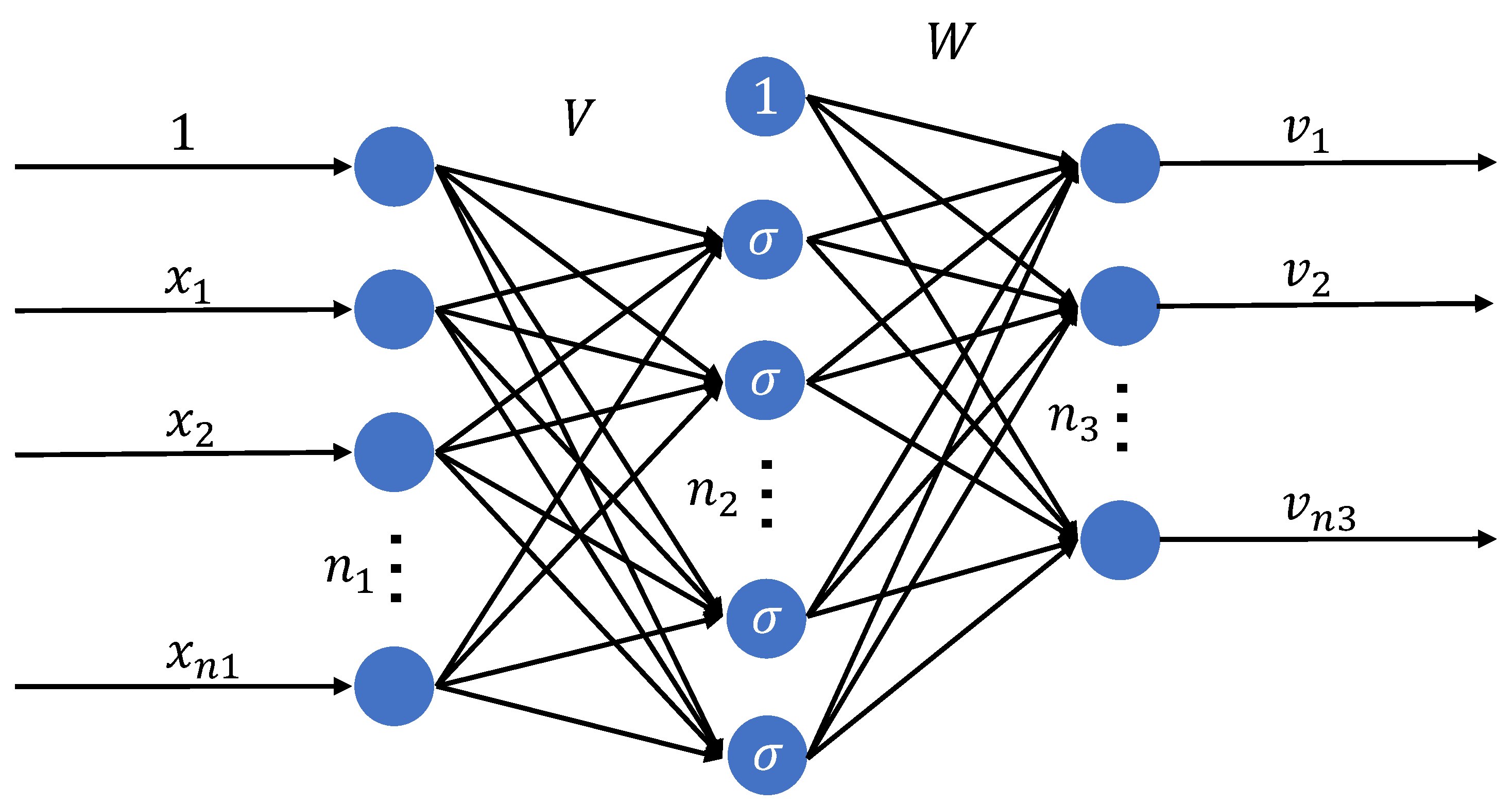
In recent years, neural networks have also been widely used due to their good global approximation properties for nonlinear functions [
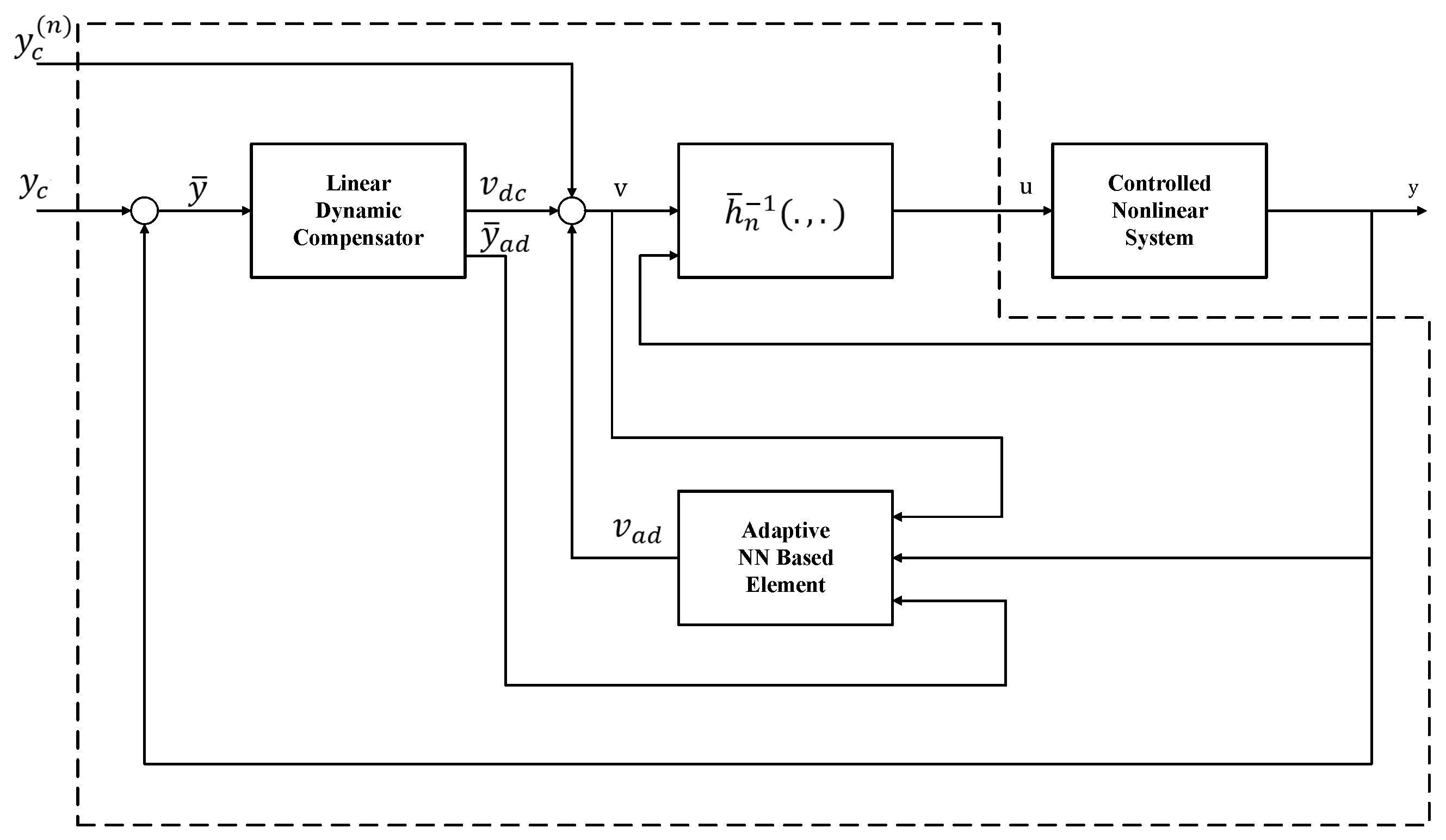
20], and are therefore suitable for adaptive compensation. Calise et al. firstly applied this approach to control a rigid robot arm and successfully incorporated it into a feedback linearization framework [
21,
22,
23], as shown in
Figure 1. Shin et al. also proposed a neural-network-based adaptive backstepping controller and achieved good performance [
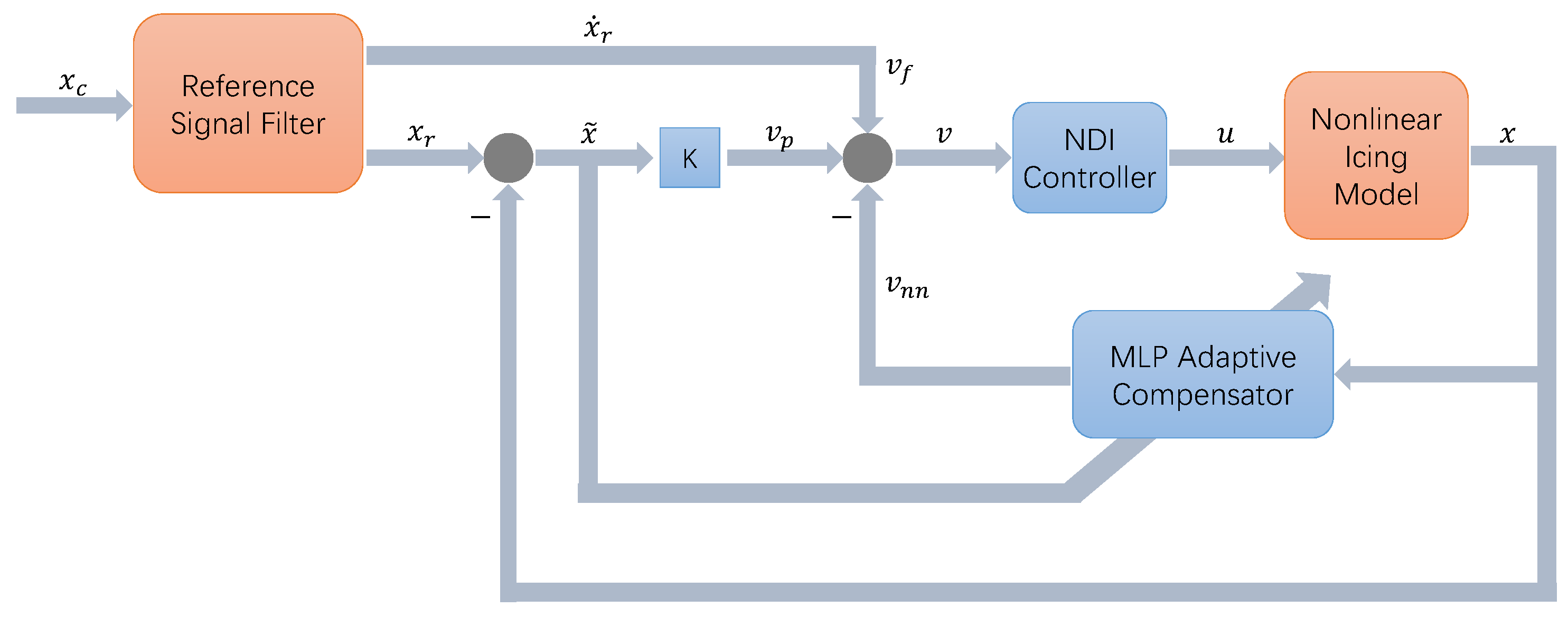
24]. Though feedback linearization is an effective control technology, the linearized model for a six-DOF icing aircraft can be highly time-varying, and compensation for this approximate linear system can vary significantly in continuous time steps. To address this issue, this paper combines the nonlinear inversion method with neural networks and divides the entire system into three-layer subsystems. This decoupling stabilizes the ideal compensation and enhances the neural network’s learning effect.
To be specific, the highlights of our work are
We established a comprehensive fixed-wing icing model of HALE-UAV considering wind disturbance and sensor noise.
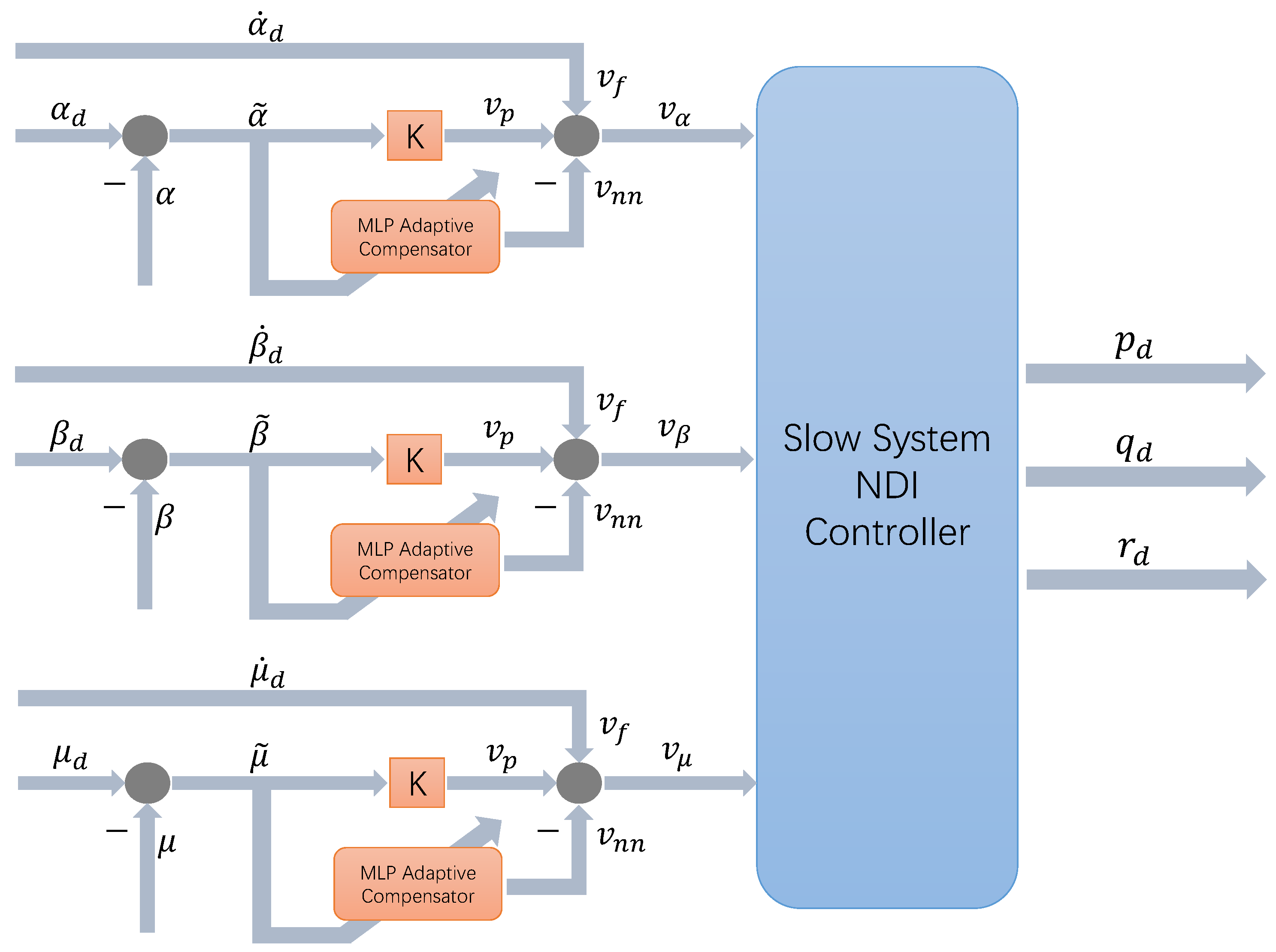
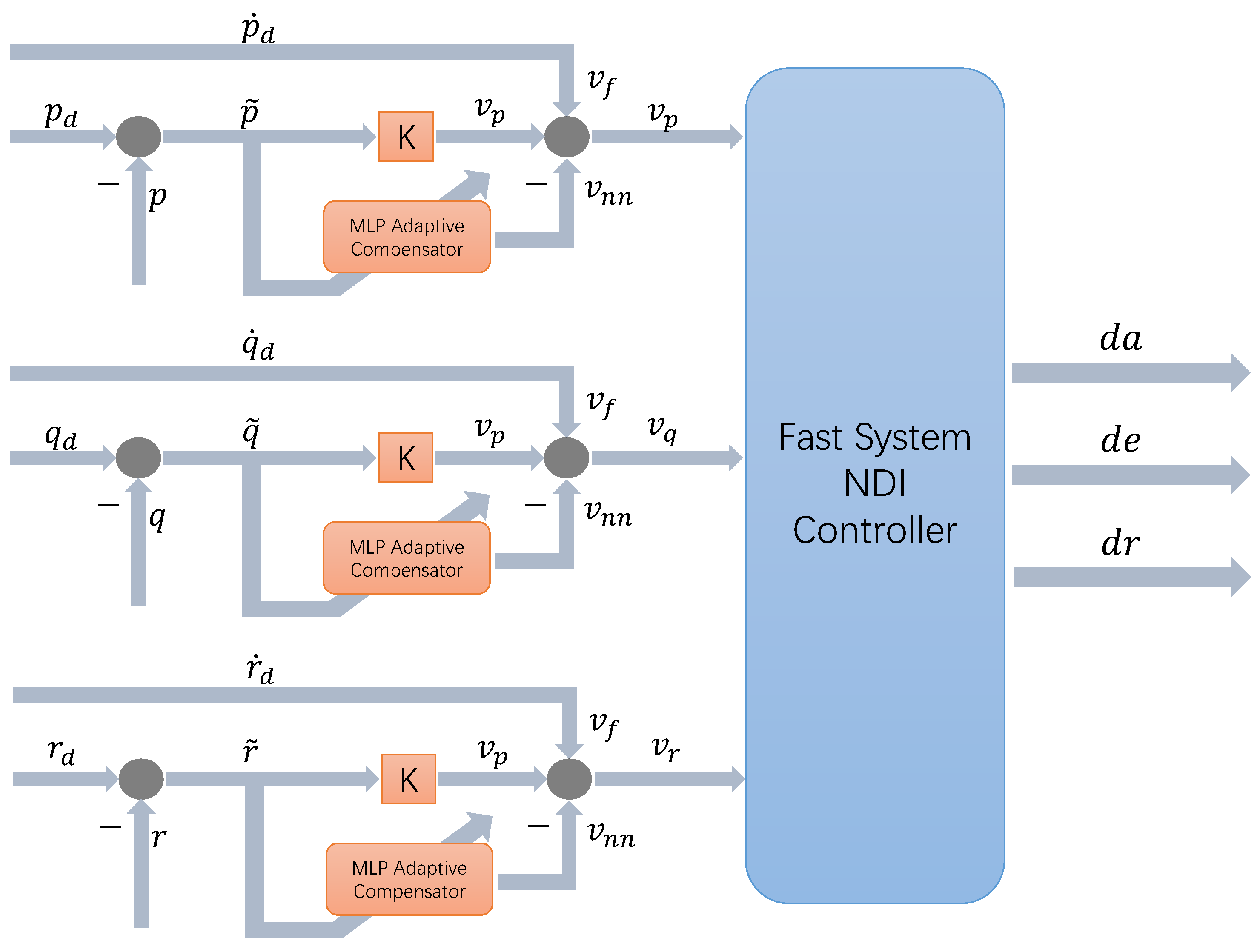
We proposed an ice-tolerant control structure by combining multilayer perceptrons with the nonlinear dynamic inverse method (MLP-NDI controller) to provide robust compensation for the nonlinear and time-varying icing effects.
We conducted extensive comparisons between the MLP-NDI controller and three typical controllers, demonstrating its superior performance in terms of stability, accuracy, and robustness.
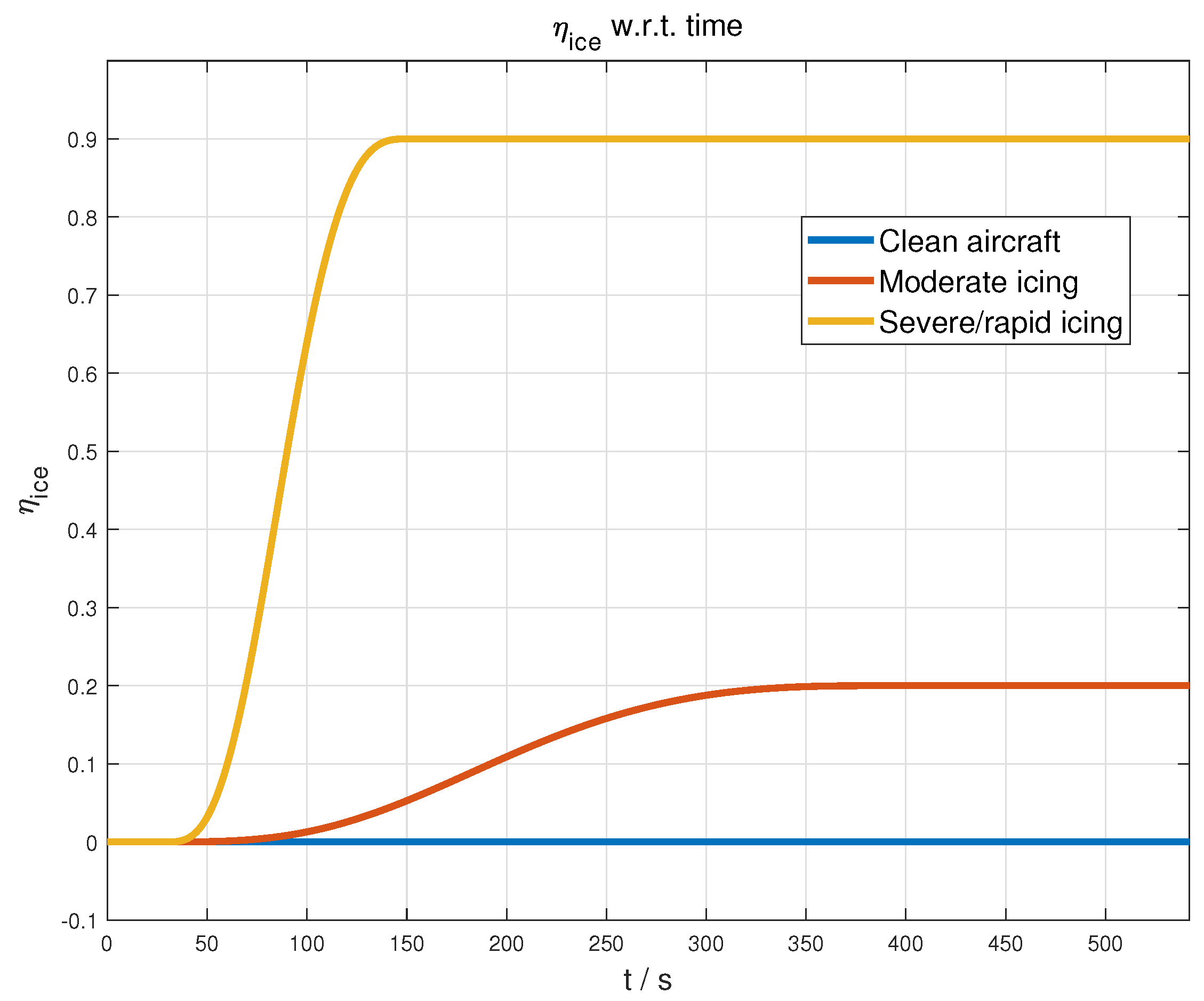
We explored the robustness and verified the effectiveness of an MLP-NDI controller under various icing scenarios.
The remaining parts of this paper are organized as follows.
Section 2 analyses the icing effect on flight dynamics based on the DHC-6 nonlinear model.
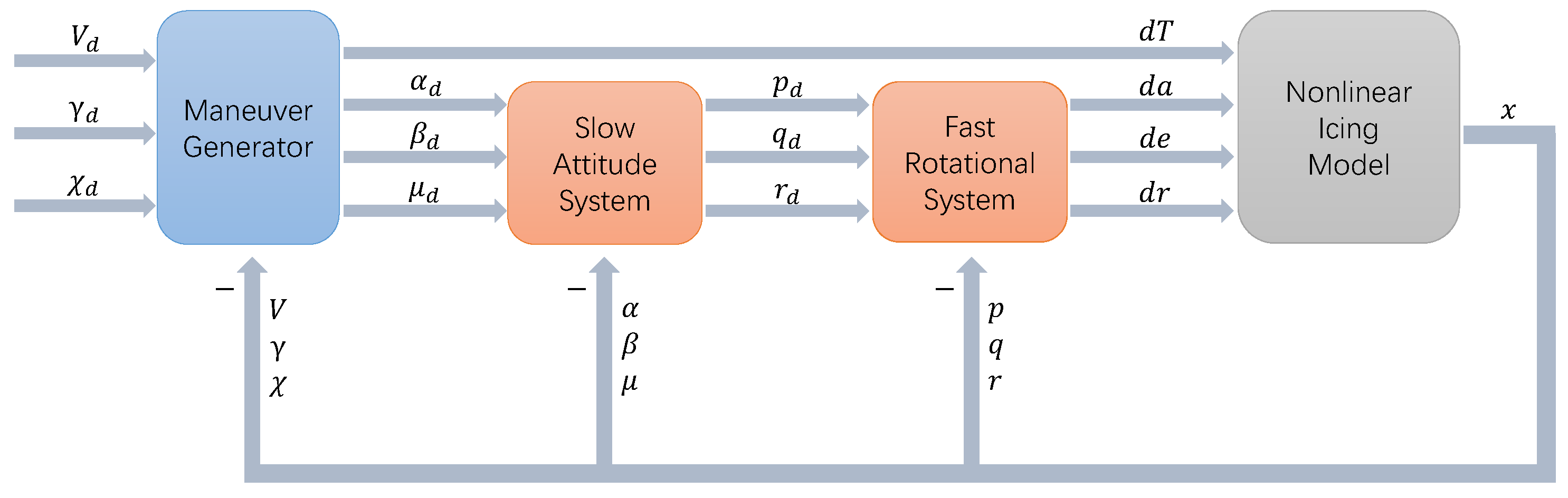
Section 3 gives the overall control architecture of the NDI with MLP compensator and applies the MLP-NDI controller to icing flight control, including the icing effect model.
Section 4 provides the simulation results and analysis, which demonstrate the feasibility of the MLP-NDI with a preliminary assessment of its control performance. Finally, a conclusion is presented in
Section 5.
5. Conclusions
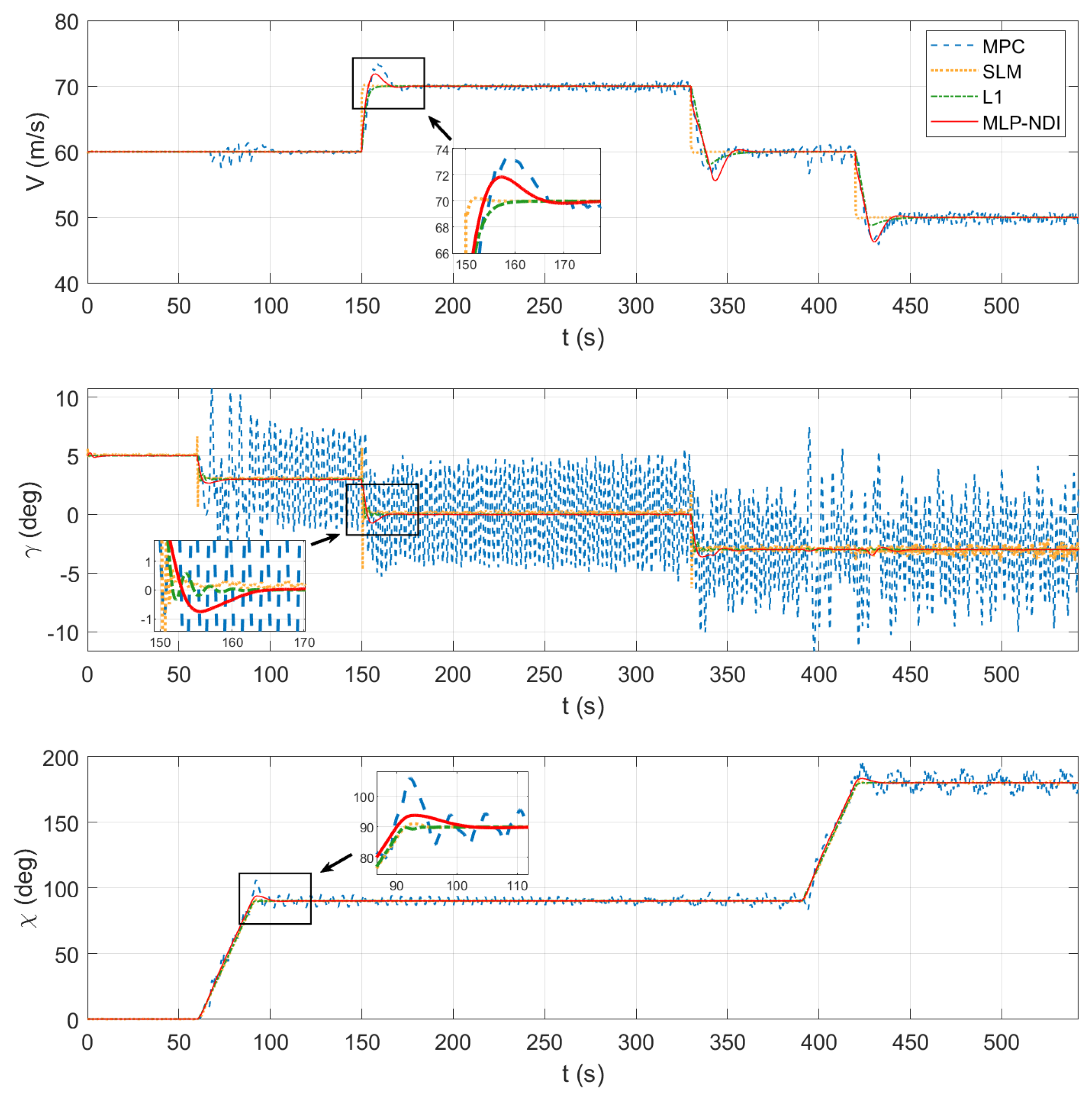
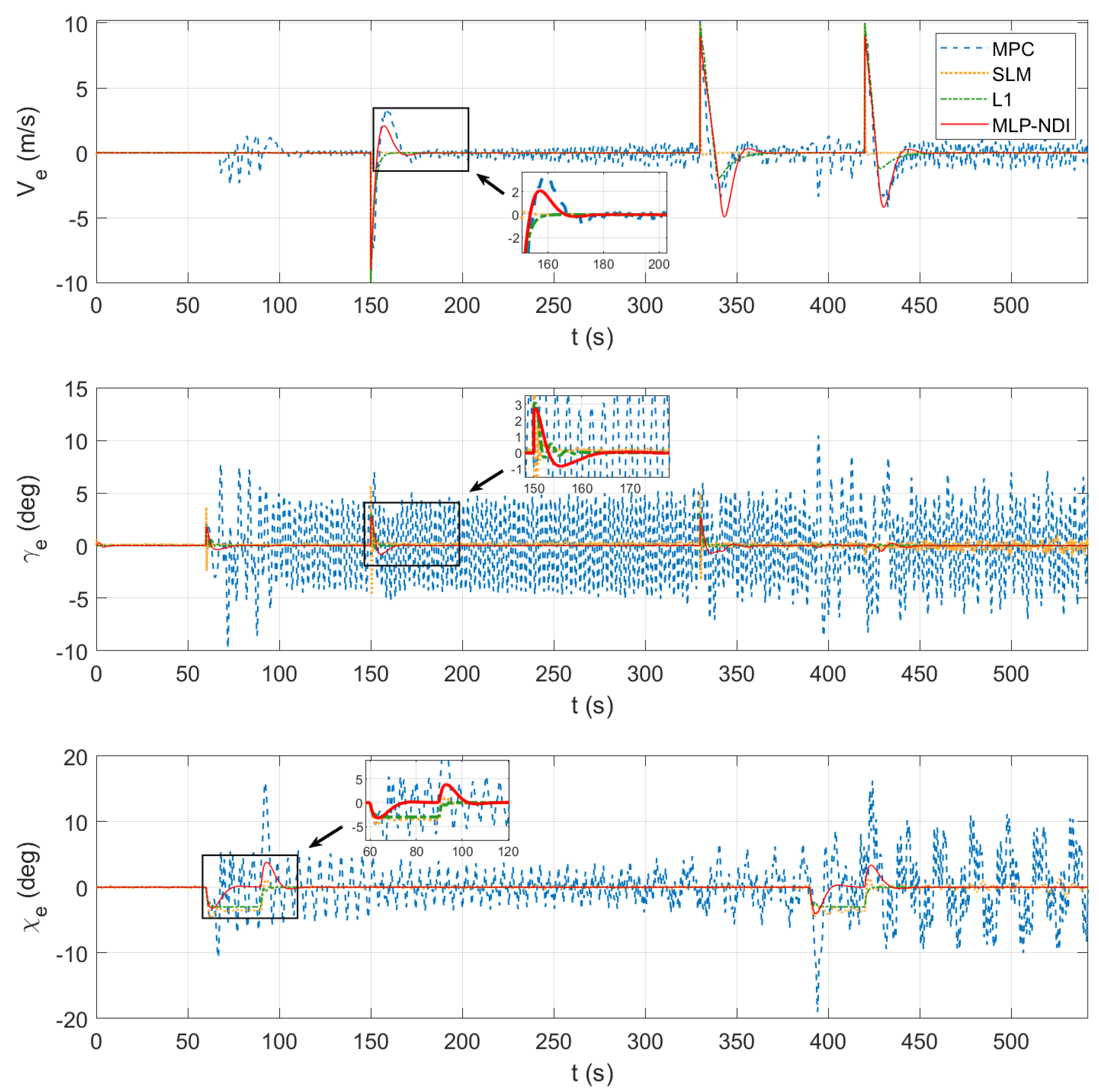
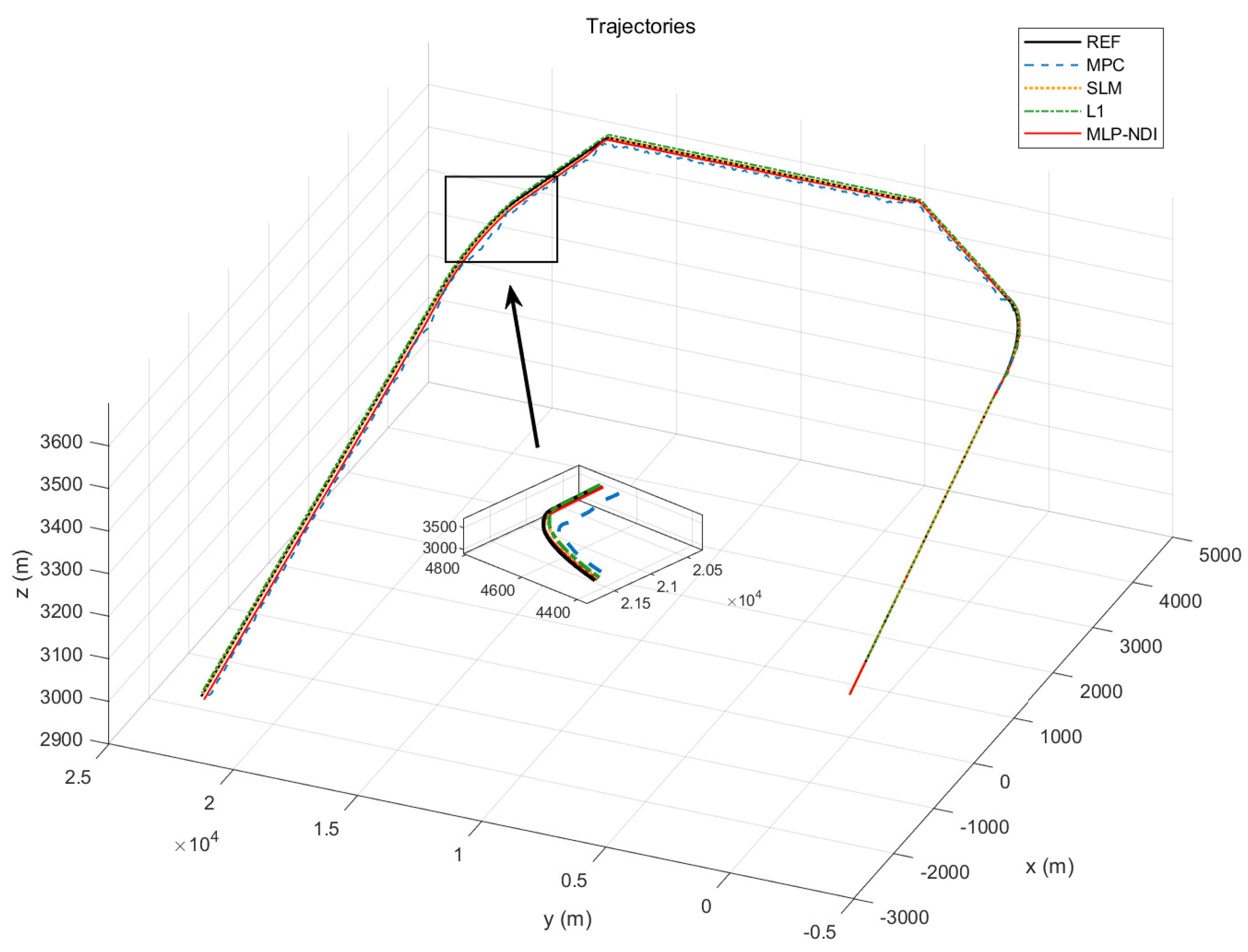
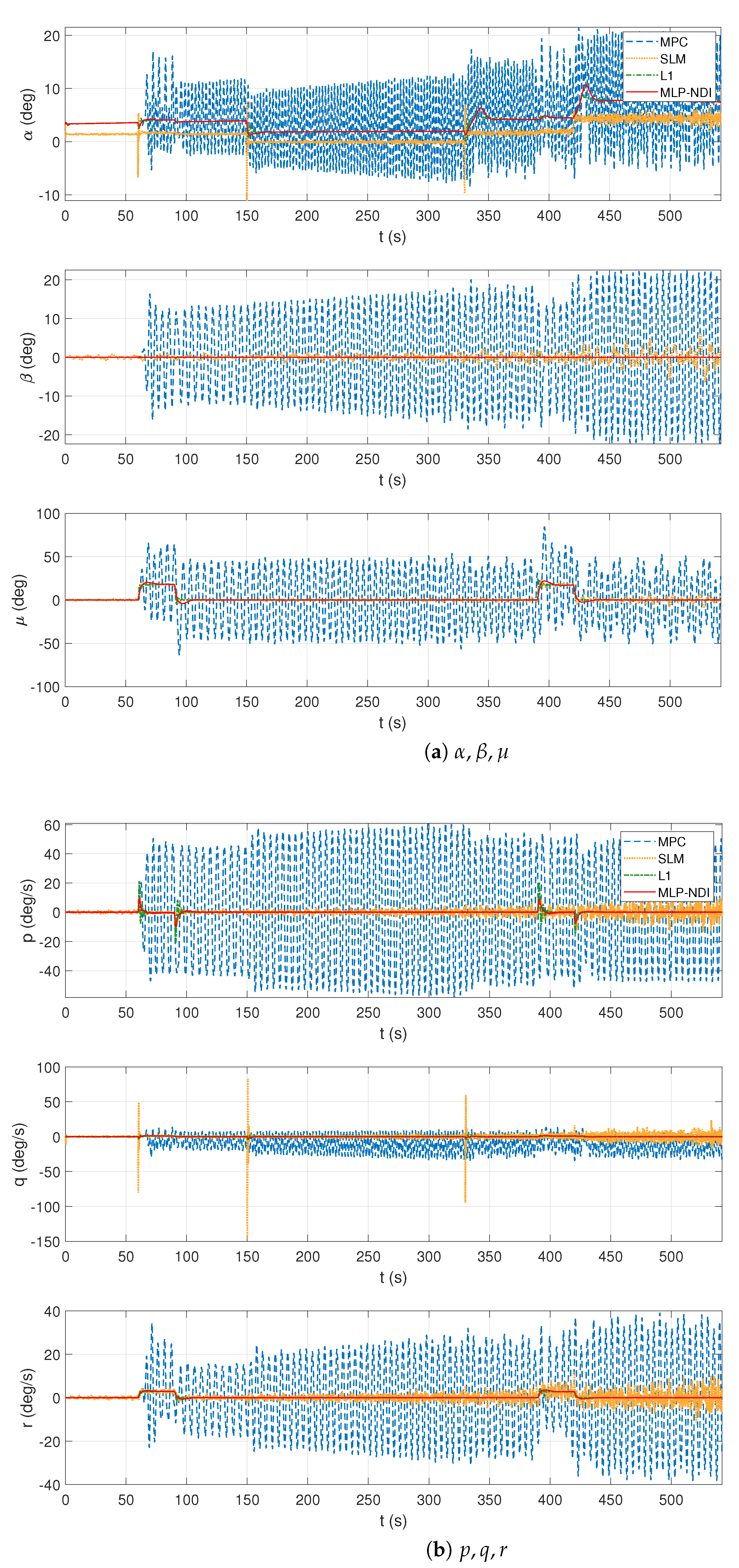
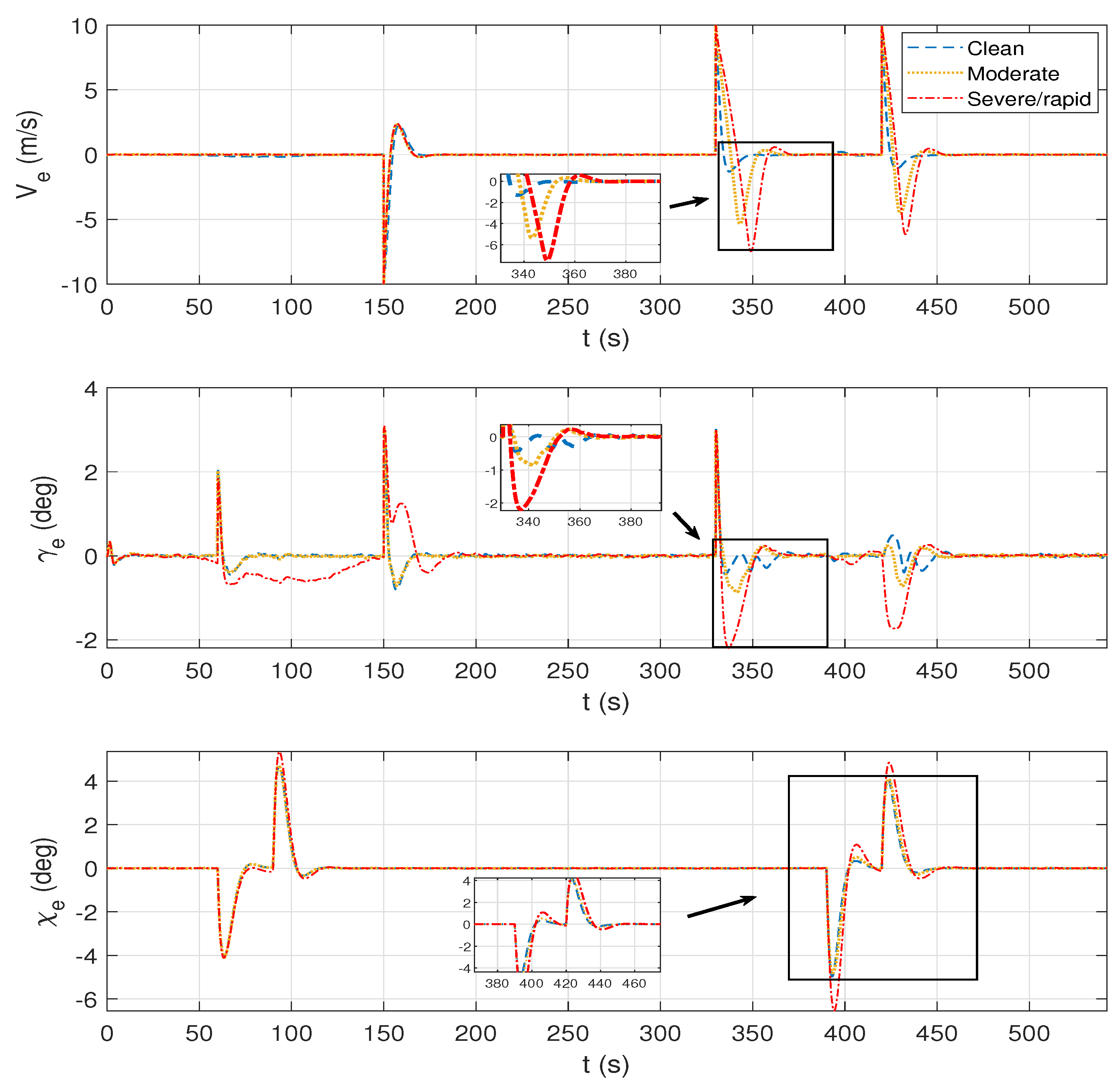
In this paper, a novel MLP-NDI controller was proposed and its performance in ice-tolerant control was demonstrated. To implement and test the controller, a DHC-6 model was constructed that includes icing effect, wind disturbance, and measurement noise. In addition to the MLP-NDI controller, three other controllers were also tested on this icing model, and the performance of all controllers was evaluated during various combined maneuvers.
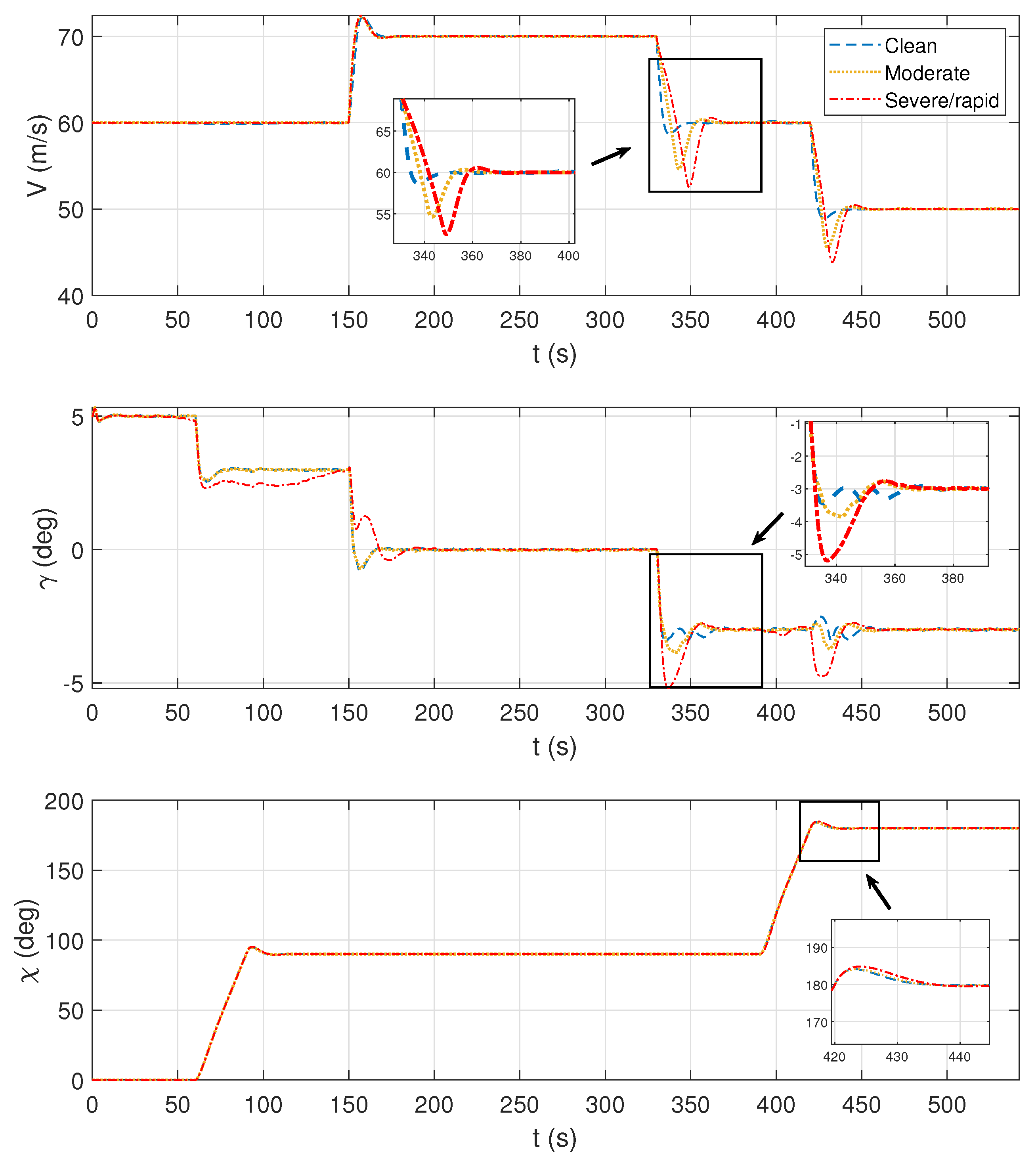
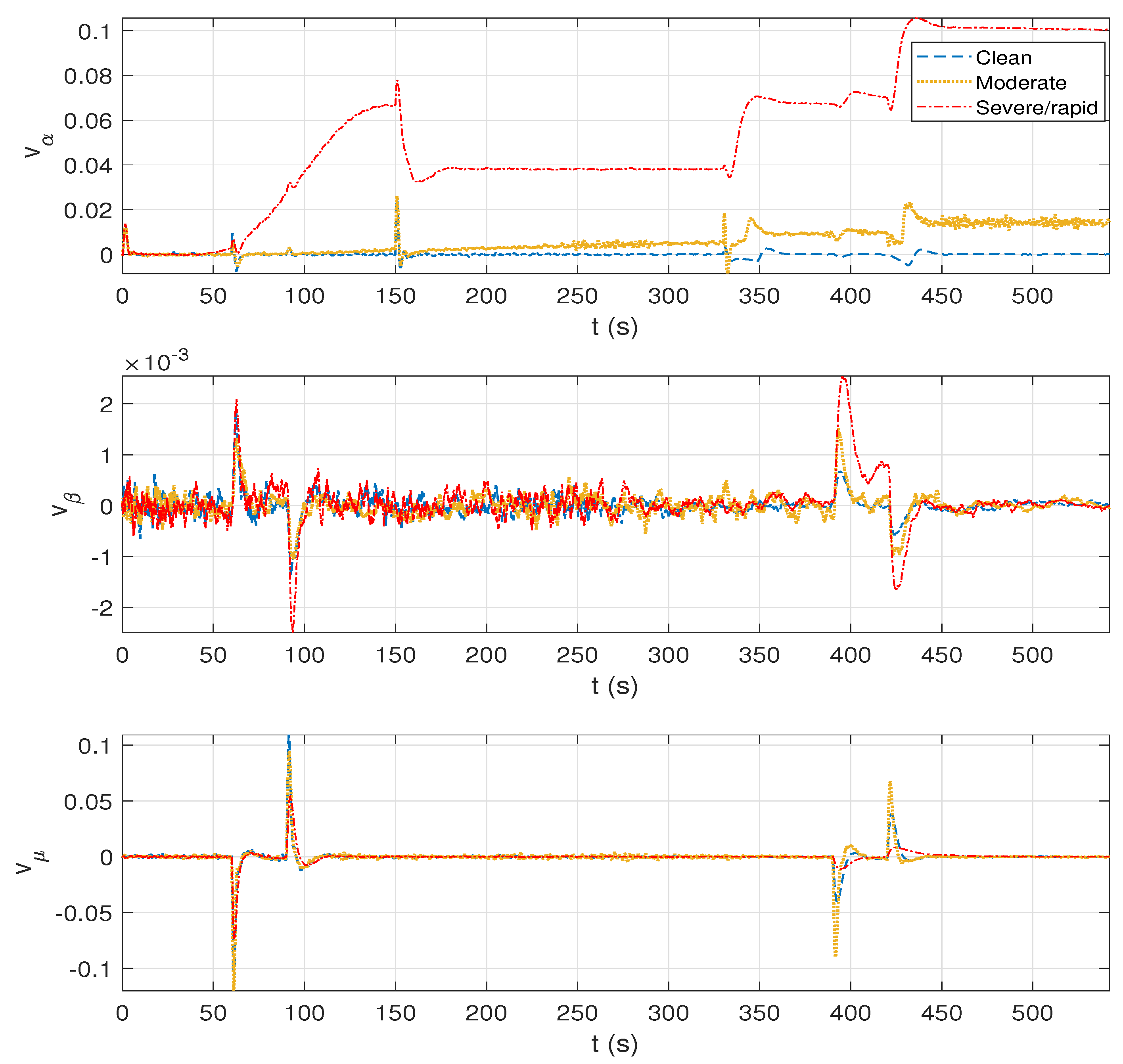
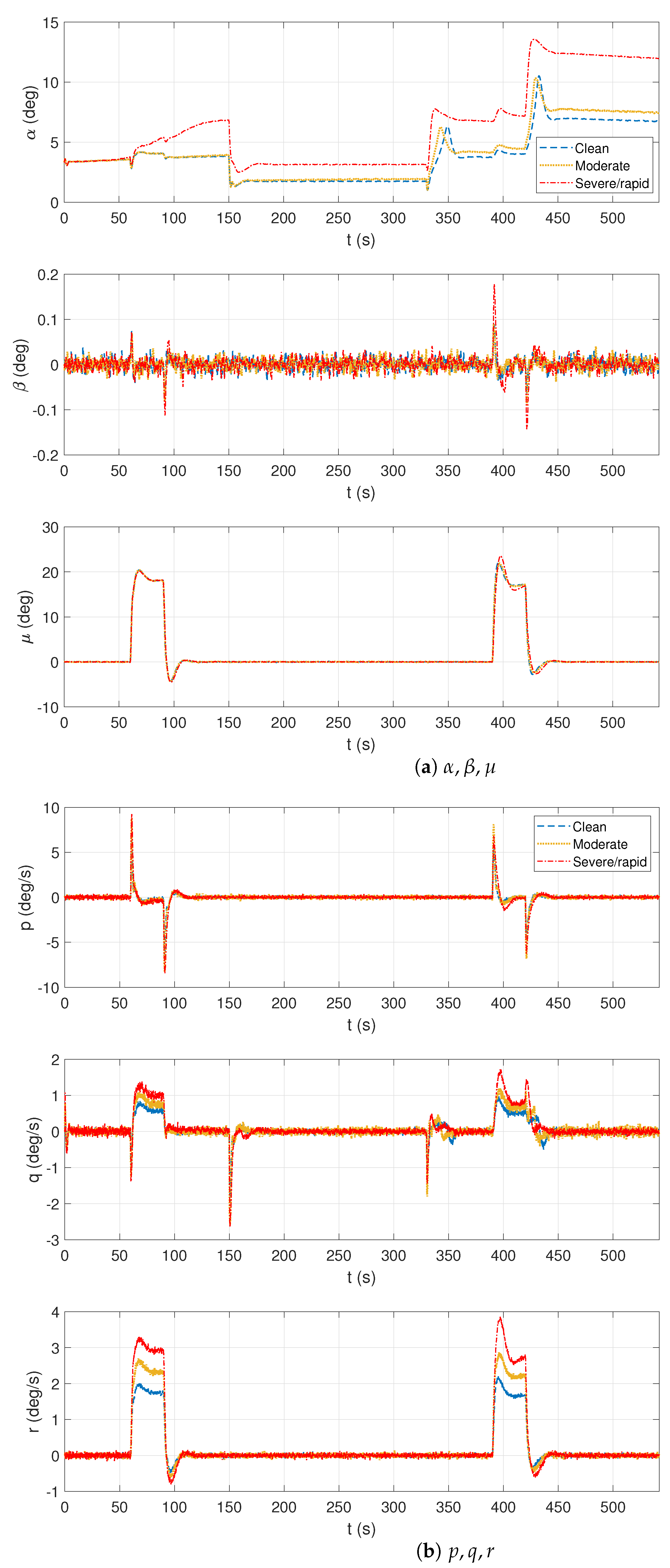
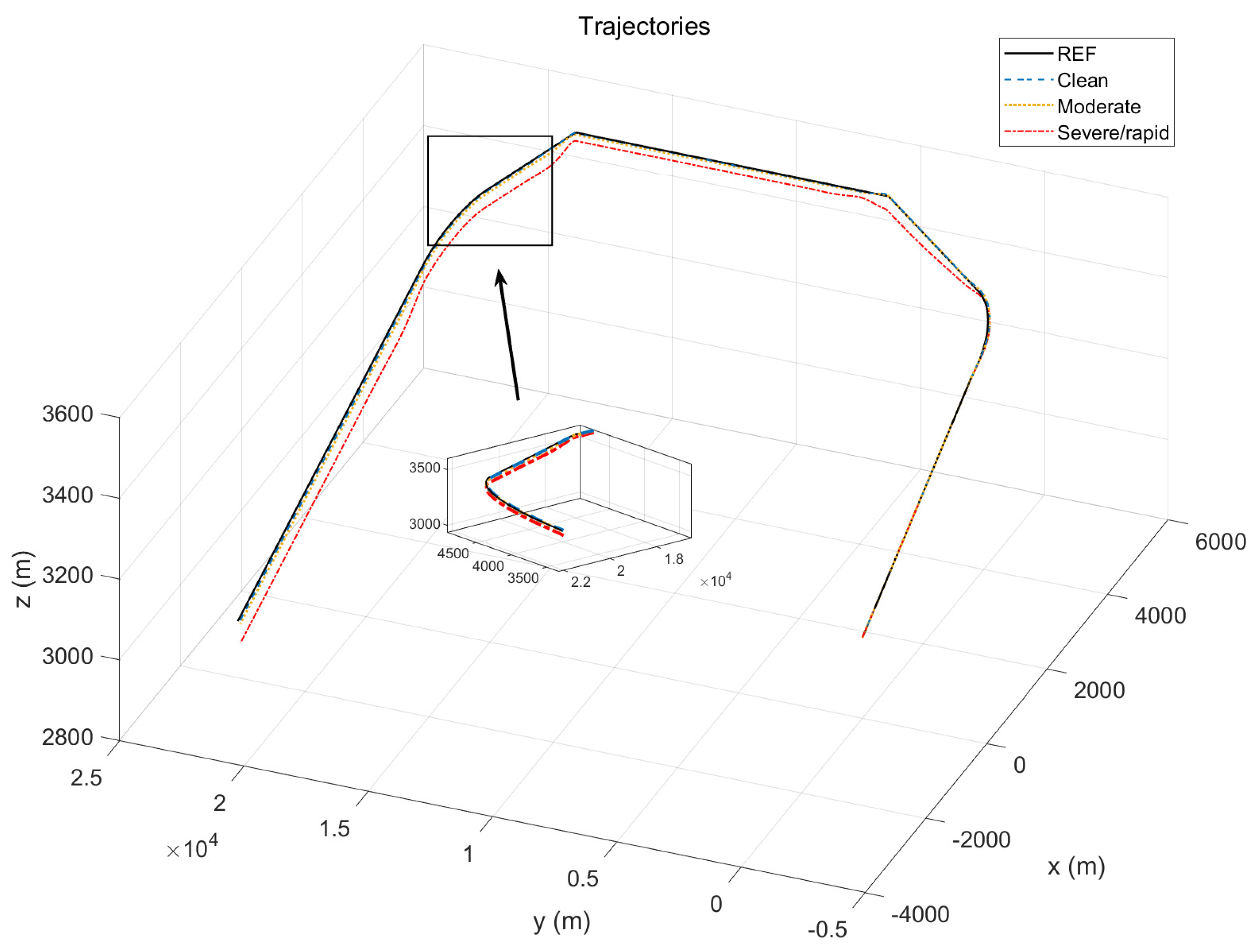
In the aforementioned modeling scenario, the traditional NDI method was found to have a huge inversion error brought by model uncertainty. To solve this problem, a compensator based on neural networks was designed for each of the three control channels. Two simulations were conducted with the following purposes: the first compared the MLP-NDI controller’s performance with other typical controllers, and the second tested its robustness under three icing scenarios. The results demonstrate that the MLP-NDI controller is capable of adapting to different icing conditions and exhibits strong robustness against in-flight icing.
Future work will involve the application of deep neural networks to the controller, and the consideration of more complex models, such as those involving center of gravity offset and shape asymmetry. In addition, the current controller will be tested and improved in more extreme conditions, including addressing actuator limitations or failures.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}