
The Modeling and SOC Estimation of a LiFePO4 Battery Considering the Relaxation and Overshoot of Polarization Voltage

Abstract
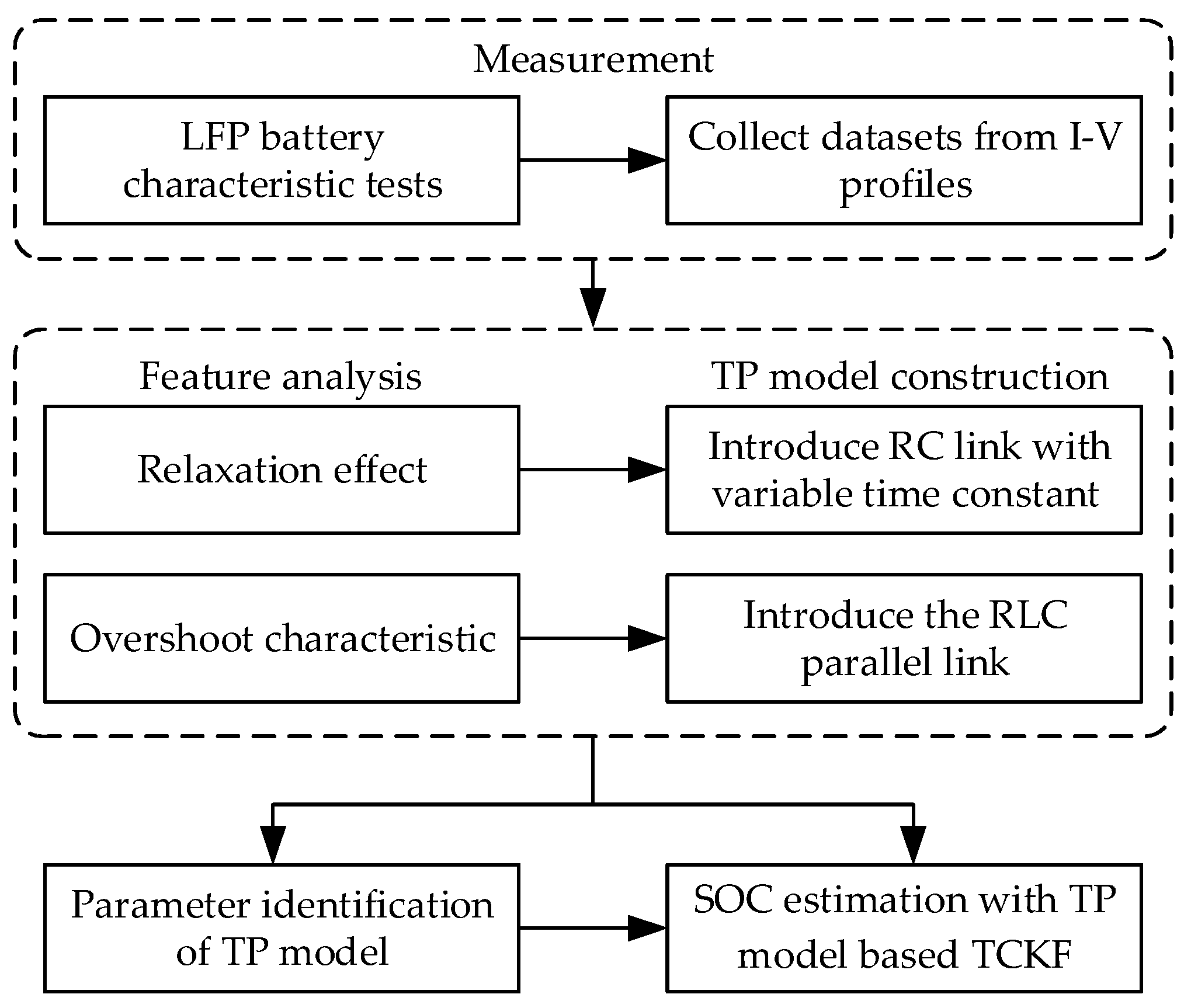
:1. Introduction
2. Theory of the TPM of LFP Battery
2.1. The Relaxation Effect and the Addition of RC Link with Variable Time Constant
2.2. The Overshoot Characteristic and the Addition of RLC Parallel Link
3. Parameter Identification of TP Model
3.1. Offline Parameter Identification of Variable Time Constant RC Link
3.2. Offline Parameter Identification of RLC Parallel Link
4. SOC Estimation Based on TCKF Algorithm
5. Experimental Results and Discussion
5.1. Experiment
5.2. Model Verification
5.3. Algorithm Verification
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Goodenough, J.B.; Park, K.S. The Li-ion rechargeable battery: A perspective. J. Am. Chem. Soc. 2013, 135, 1167–1176. [Google Scholar] [CrossRef]
- Zhu, S.Q.; Huang, A.; Xu, Y. Improving methods for better performance of commercial LiFePO4/C batteries. Int. J. Electrochem. Sci. 2021, 16, 210564. [Google Scholar] [CrossRef]
- He, R.; Xie, W.; Wu, B.; Brandon, N.P.; Liu, X.; Li, X.; Yang, S. Towards interactional management for power batteries of electric vehicles. RSC Adv. 2023, 13, 2036–2056. [Google Scholar] [CrossRef] [PubMed]
- Zheng, Y.; Ouyang, M.; Lu, L.; Li, J.; Han, X.; Xu, L.; Ma, H.; Dollmeyer, T.A.; Freyermuth, V. Cell state-of-charge inconsistency estimation for LiFePO4 battery pack in hybrid electric vehicles using mean-difference model. Appl. Energy 2013, 111, 571–580. [Google Scholar] [CrossRef]
- Ma, J.; Xie, J.; Bai, K. Comparative Study of Non-Electrochemical Hysteresis Models for LiFePO4/Graphite Batteries. J. Power Electron. 2018, 18, 1585–1594. [Google Scholar]
- Kondo, H.; Sasaki, T.; Barai, P.; Srinivasan, V. Comprehensive study of the polarization behavior of LiFePO4 electrodes based on a many-particle model. J. Electrochem. Soc. 2018, 165, A2047. [Google Scholar] [CrossRef]
- Daubner, S.; Amos, P.K.; Schoof, E.; Santoki, J.; Schneider, D.; Nestler, B. Multiphase-field modeling of spinodal decomposition during intercalation in an Allen-Cahn framework. Phys. Rev. Mater. 2021, 5, 035406. [Google Scholar] [CrossRef]
- Koga, S.; Camacho-Solorio, L.; Krstic, M. State estimation for lithium-ion batteries with phase transition materials via boundary observers. J. Dyn. Syst. Meas. Control 2021, 143, 4048779. [Google Scholar] [CrossRef]
- Zhou, X.; Reimuth, C.; Xu, B.X. Phase-field simulation of misfit dislocations in two-phase electrode particles: Driving force calculation and stability analysis. Int. J. Solids Struct. 2022, 249, 111688. [Google Scholar] [CrossRef]
- Cheng, F.; Hu, Y.; Zhao, L.; Sarwar, S. Global solutions to a phase-field model with logarithmic potential for lithium-ion batteries. Math. Mech. Solids 2022, 27, 3–21. [Google Scholar] [CrossRef]
- Jokar, A.; Désilets, M.; Lacroix, M.; Zaghib, K. Mesoscopic modeling and parameter estimation of a lithium-ion battery based on LiFePO4/graphite. J. Power Sources 2018, 379, 84–90. [Google Scholar] [CrossRef]
- Guo, B.; Liu, C.; Gao, Y.; Zhu, C.; Zhang, X.; Ma, X.; Wang, F. A combining electrochemical model for LiFePO4-graphite lithium-ion battery considering cathode heterogeneous solid phase phenomenon. Int. J. Energy Res. 2022, 46, 15231–15243. [Google Scholar] [CrossRef]
- Kirk, T.L.; Evans, J.; Please, C.P.; Chapman, S.J. Modeling electrode heterogeneity in lithium-ion batteries: Unimodal and bimodal particle-size distributions. SIAM J. Appl. Math. 2022, 82, 625–653. [Google Scholar] [CrossRef]
- Dreyer, W.; Jamnik, J.; Guhlke, C.; Huth, R.; Moškon, J.; Gaberšček, M. The thermodynamic origin of hysteresis in insertion batteries. Nat. Mater. 2010, 9, 448–453. [Google Scholar] [CrossRef]
- Baronti, F.; Zamboni, W.; Femia, N.; Roncella, R.; Saletti, R. Experimental analysis of open-circuit voltage hysteresis in lithium-iron-phosphate batteries. In Proceedings of the IECON 2013-39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 6728–6733. [Google Scholar]
- Chayratsami, P.; Plett, G.L. Hysteresis modeling of lithium-silicon half cells using discrete preisach model. In Proceedings of the 2018 8th IEEE International Conference on Control System, Computing and Engineering (ICCSCE), Penang, Malaysia, 23–25 November 2018; pp. 31–36. [Google Scholar]
- Roscher, M.A.; Sauer, D.U. Dynamic electric behavior and open-circuit-voltage modeling of LiFePO4-based lithium ion secondary batteries. J. Power Sources 2011, 196, 331–336. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 3. State and parameter estimation. J. Power Sources 2004, 134, 277–292. [Google Scholar] [CrossRef]
- Fuller, T.F.; Doyle, M.; Newman, J. Relaxation phenomena in lithium-ion-insertion cells. J. Electrochem. Soc. 1994, 141, 982. [Google Scholar] [CrossRef] [Green Version]
- Park, M.; Zhang, X.; Chung, M.; Less, G.B.; Sastry, A.M. A review of conduction phenomena in Li-ion batteries. J. Power Sources 2010, 195, 7904–7929. [Google Scholar] [CrossRef]
- Pei, L.; Wang, T.; Lu, R.; Zhu, C. Development of a voltage relaxation model for rapid open-circuit voltage prediction in lithium-ion batteries. J. Power Sources 2014, 253, 412–418. [Google Scholar] [CrossRef]
- Hsieh, Y.C.; Chiu, Y.C.; Wu, W.T.; Huang, Y.C. Battery model based on cubic over-potential differential equation. IET Power Electron. 2019, 12, 3085–3092. [Google Scholar] [CrossRef]
- Sasaki, T.; Ukyo, Y.; Novák, P. Memory effect in a lithium-ion battery. Nat. Mater. 2013, 12, 569–575. [Google Scholar] [CrossRef] [PubMed]
- Jia, J.; Tan, C.; Liu, M.; Li, D.; Chen, Y. Relaxation-induced memory effect of LiFePO4 electrodes in Li-ion batteries. ACS Appl. Mater. Interfaces 2017, 9, 24561–24567. [Google Scholar] [CrossRef] [PubMed]
- Guo, X.; Song, B.; Yu, G.; Wu, X.; Feng, X.; Li, D.; Chen, Y. Size-dependent memory effect of the LiFePO4 electrode in Li-ion batteries. ACS Appl. Mater. Interfaces 2018, 10, 41407–41414. [Google Scholar] [CrossRef] [PubMed]
- Shi, W.; Wang, J.; Zheng, J.; Jiang, J.; Viswanathan, V.; Zhang, J.G. Influence of memory effect on the state-of-charge estimation of large-format Li-ion batteries based on LiFePO4 cathode. J. Power Sources 2016, 312, 55–59. [Google Scholar] [CrossRef] [Green Version]
- Bai, P.; Cogswell, D.A.; Bazant, M.Z. Suppression of phase separation in LiFePO4 nanoparticles during battery discharge. Nano Lett. 2011, 11, 4890–4896. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jiang, J.; Liu, Q.; Zhang, C.; Zhang, W. Evaluation of acceptable charging current of power Li-ion batteries based on polarization characteristics. IEEE Trans. Ind. Electron. 2014, 61, 6844–6851. [Google Scholar] [CrossRef]
- Peng, J.; Luo, J.; He, H.; Lu, B. An improved state of charge estimation method based on cubature Kalman filter for lithium-ion batteries. Appl. Energy 2019, 253, 113520. [Google Scholar] [CrossRef]
- Zhang, Y.; Huang, Y.; Wu, Z.; Li, N. Moving state marine SINS initial alignment based on transformed cubature Kalman filter. In Proceedings of the 26th Chinese Control and Decision Conference (2014 CCDC), Changsha, China, 31 May–2 June 2014; pp. 3262–3267. [Google Scholar]
- Ghanipoor, F.; Hashemi, M.; Salarieh, H. Toward calibration of low-precision MEMS IMU using a nonlinear model and TUKF. IEEE Sens. J. 2020, 20, 4131–4138. [Google Scholar] [CrossRef]
- Yang, J.; Xia, B.; Shang, Y.; Huang, W.; Mi, C. Improved battery parameter estimation method considering operating scenarios for HEV/EV applications. Energies 2016, 10, 5. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step | Operation | |
|---|---|---|
| Initialization | ||
| Time Update | ||
| Evaluate the transformed cubature points | ||
| Evaluate the propagated transformed cubature points | ||
| Estimate the predicted state | ||
| Estimate the covariance matrix | ||
| Measurement Update | ||
| Evaluate the transformed cubature points | ||
| Evaluate the propagated transformed cubature points | ||
| Estimate the predicted measurement | ||
| Estimate innovation covariance matrix | ||
| Estimate cross-covariance matrix | ||
| Output update | ||
| Estimate the Kalman gain | ||
| Estimate updated state | ||
| Estimate covariance | ||
| Operating Condition | Model | MAE (mV) | RMSE (mV) |
|---|---|---|---|
| 0.5 C constant current pulse charge–full stage | TP | 1.4326 | 2.5559 |
| RC2 | 3.3878 | 5.7537 | |
| RC3 | 6.4191 | 13.9097 | |
| 0.5 C constant current pulse charge–charging stage | TP | 7.5865 | 8.3683 |
| RC2 | 14.5090 | 17.2031 | |
| RC3 | 21.9709 | 27.2410 | |
| 0.5 C constant current pulse charge–resting stage | TP | 1.1062 | 1.7790 |
| RC2 | 2.7980 | 4.3777 | |
| RC3 | 5.5942 | 12.8211 | |
| 0.5 C constant current pulse discharge–full stage | TP | 1.1902 | 2.2527 |
| RC2 | 3.6451 | 5.3450 | |
| RC3 | 3.3118 | 7.1627 | |
| 0.5 C constant current pulse discharge–discharging stage | TP | 6.6860 | 7.5550 |
| RC2 | 10.4731 | 12.0999 | |
| RC3 | 11.5879 | 13.4842 | |
| 0.5 C constant current pulse discharge–resting stage | TP | 0.8985 | 1.5212 |
| RC2 | 3.2826 | 4.7237 | |
| RC3 | 2.8725 | 6.6615 | |
| 0.5 C constant current pulse charge and discharge–full stage | TP | 7.1086 | 14.6937 |
| RC2 | 13.4502 | 20.6557 | |
| RC3 | 22.4400 | 31.3671 |
| Model & Algorithm | MAE (%) | RMSE (%) |
|---|---|---|
| TP-TCKF | 2.3749 | 4.1563 |
| TP-CKF | 4.3332 | 6.0144 |
| RC2-TCKF | 3.1983 | 4.7813 |
| RC2-CKF | 6.8532 | 8.1962 |
| RC3-TCKF | 14.3942 | 15.5747 |
| RC3-CKF | 21.3984 | 22.6825 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, G.; Wu, O.; Wang, Q.; Kang, J.; Wang, J.V. The Modeling and SOC Estimation of a LiFePO4 Battery Considering the Relaxation and Overshoot of Polarization Voltage. Batteries 2023, 9, 369. https://doi.org/10.3390/batteries9070369
Zhu G, Wu O, Wang Q, Kang J, Wang JV. The Modeling and SOC Estimation of a LiFePO4 Battery Considering the Relaxation and Overshoot of Polarization Voltage. Batteries. 2023; 9(7):369. https://doi.org/10.3390/batteries9070369
Chicago/Turabian StyleZhu, Guorong, Oukai Wu, Qian Wang, Jianqiang Kang, and Jing V. Wang. 2023. "The Modeling and SOC Estimation of a LiFePO4 Battery Considering the Relaxation and Overshoot of Polarization Voltage" Batteries 9, no. 7: 369. https://doi.org/10.3390/batteries9070369