
Maximizing Efficiency in Smart Adjustable DC Link Powertrains with IGBTs and SiC MOSFETs via Optimized DC-Link Voltage Control

Abstract
:1. Introduction
- A DC-link voltage optimization method based on dynamic programming (DP) that minimizes overall powertrain losses is proposed, taking into account the impact of battery terminal voltage variation.
- The energy efficiency of powertrains based on IGBTs and MOSFETs with adjustable DC-link voltage is compared and verified through simulations in PLECS. The effectiveness of the comparison was demonstrated under the WLTC.
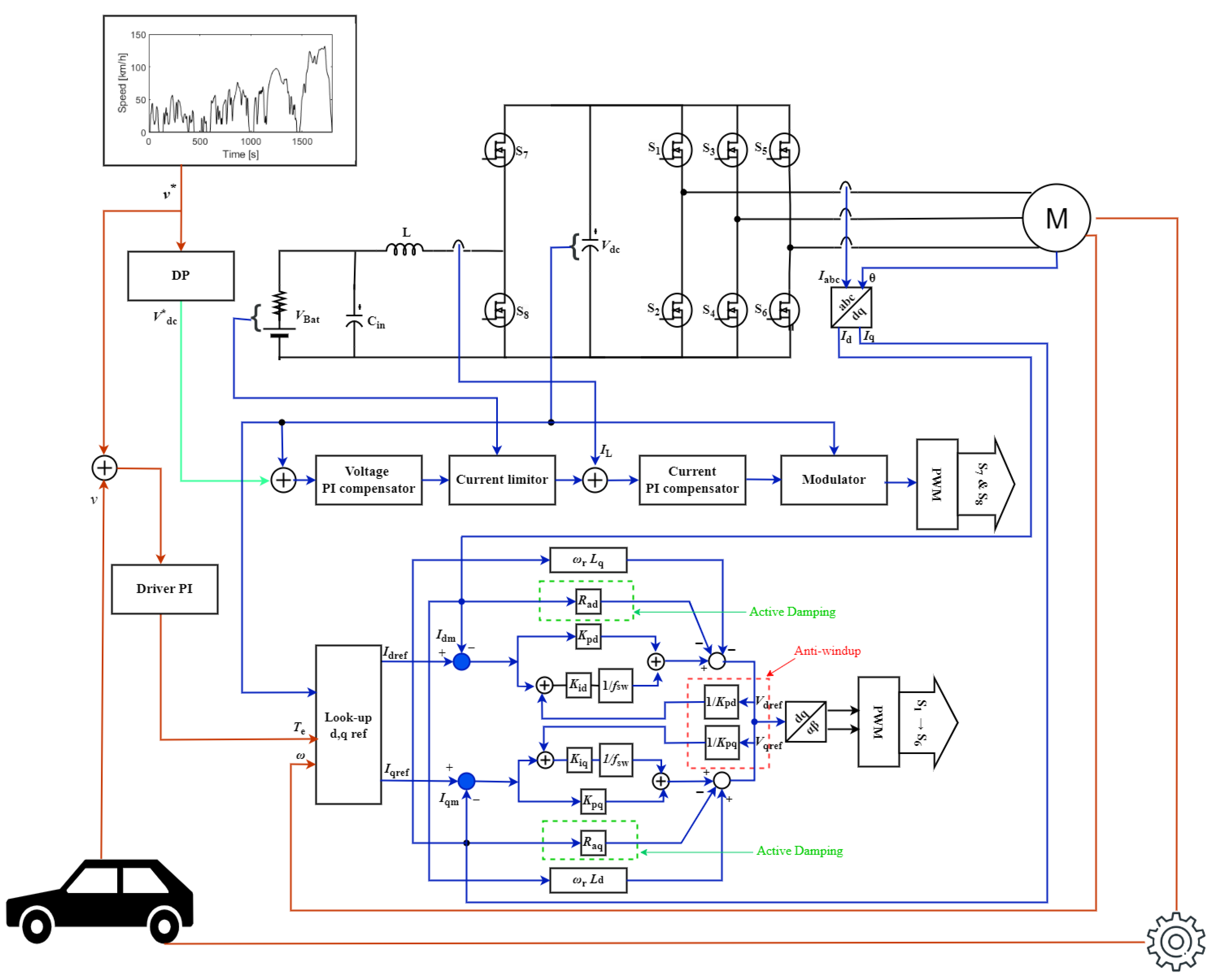
2. Analytical Powertrain Model
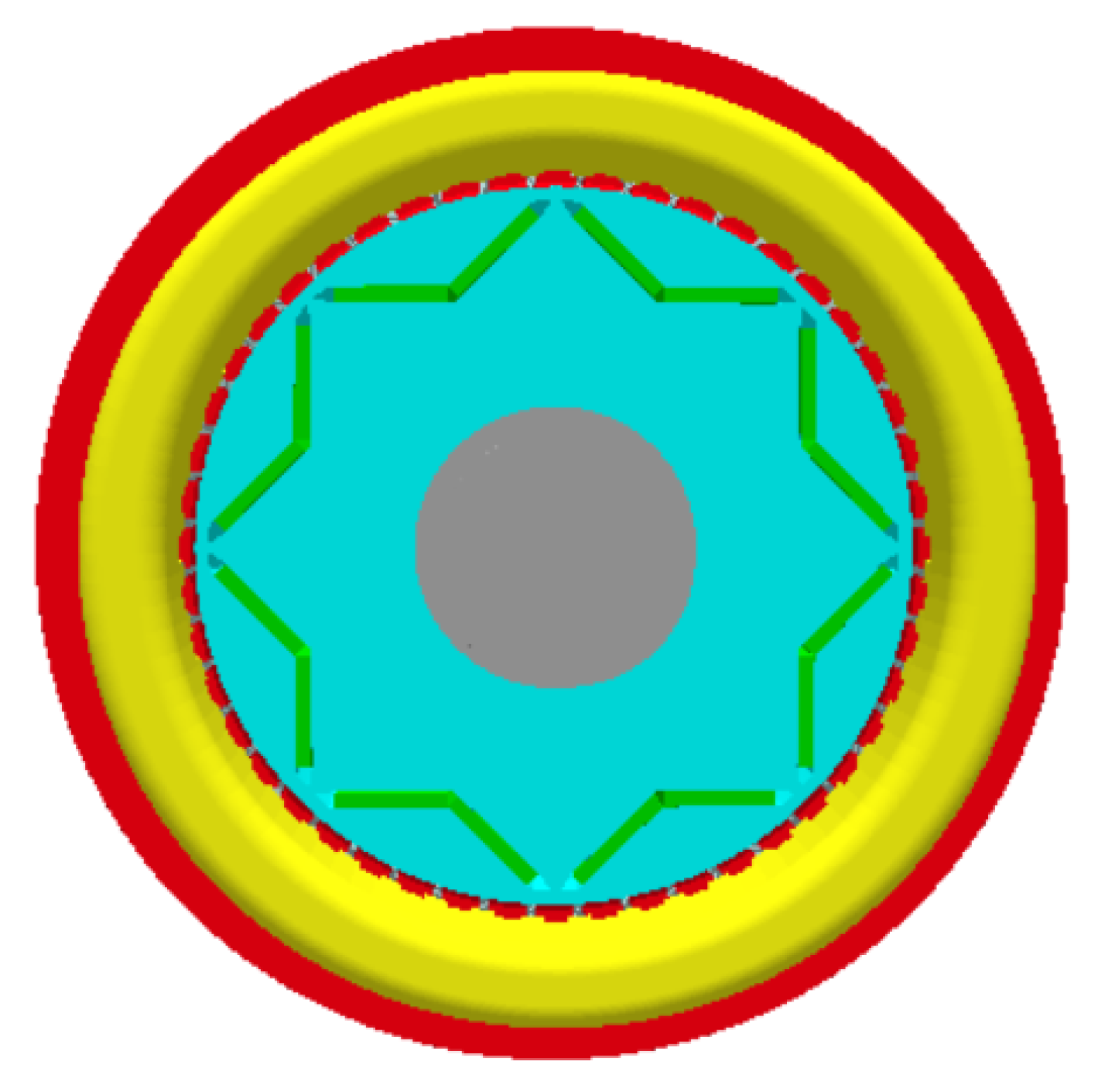
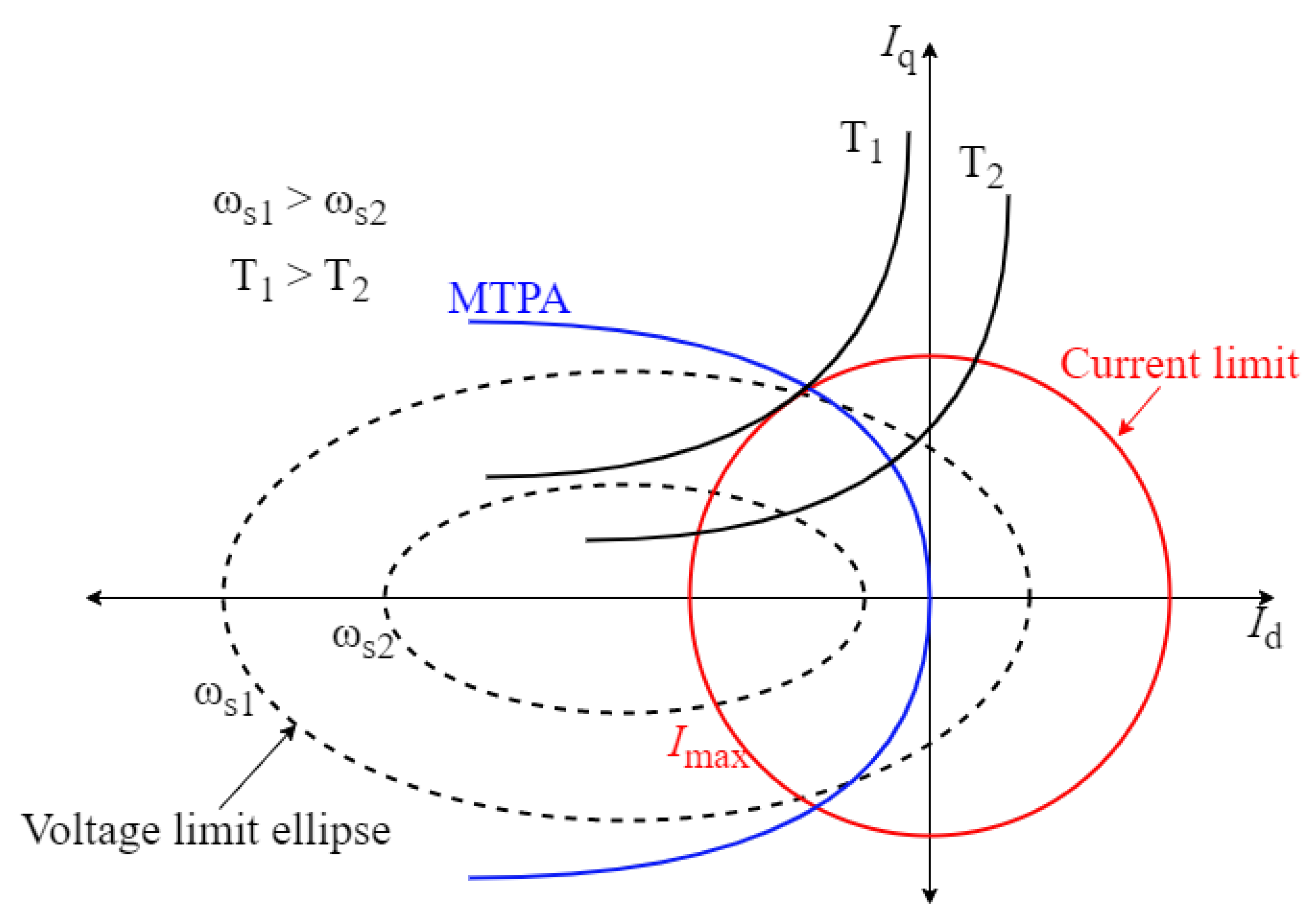
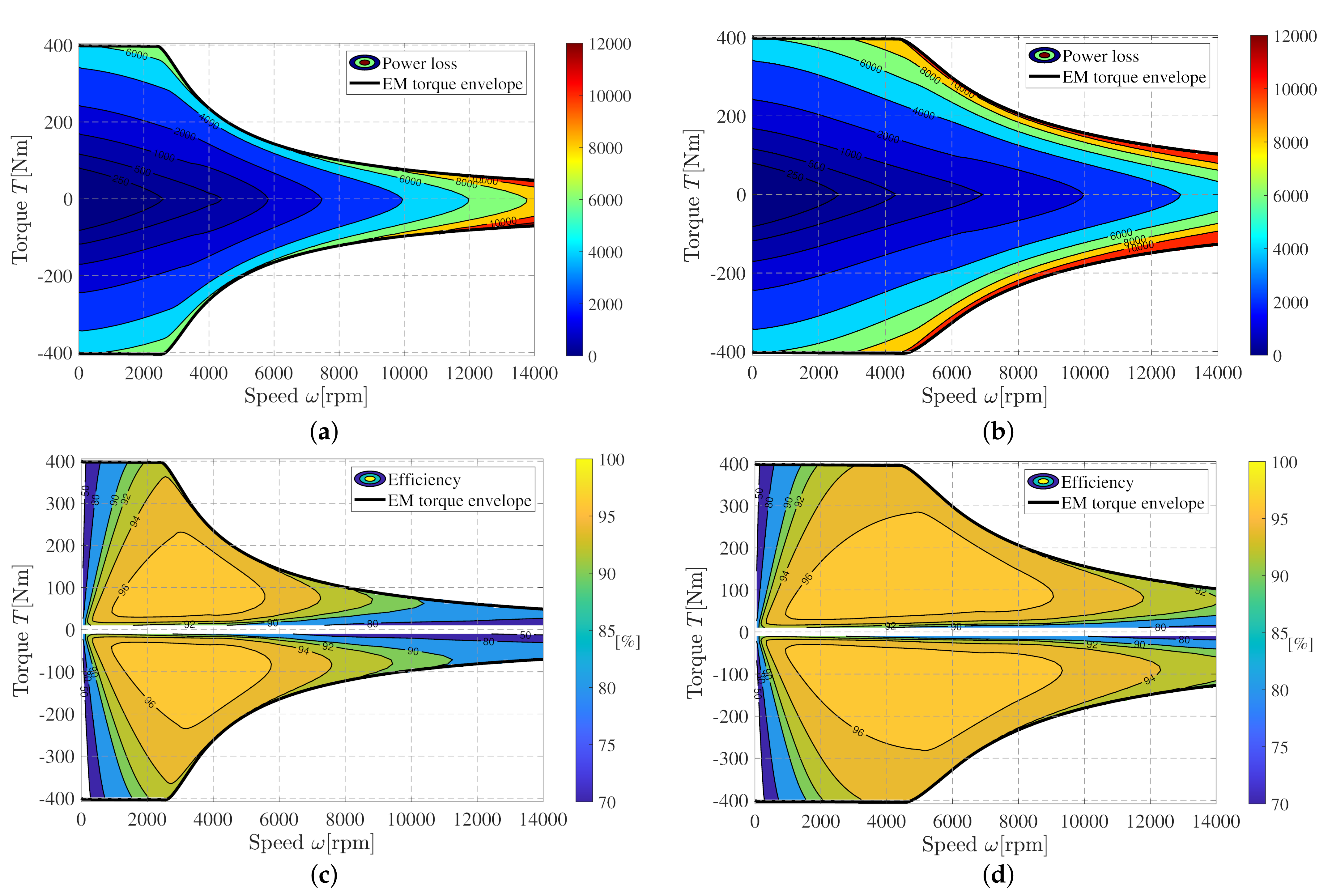
2.1. Electric Machine
2.2. Three-Phase Inverter
2.3. DC-DC Converter
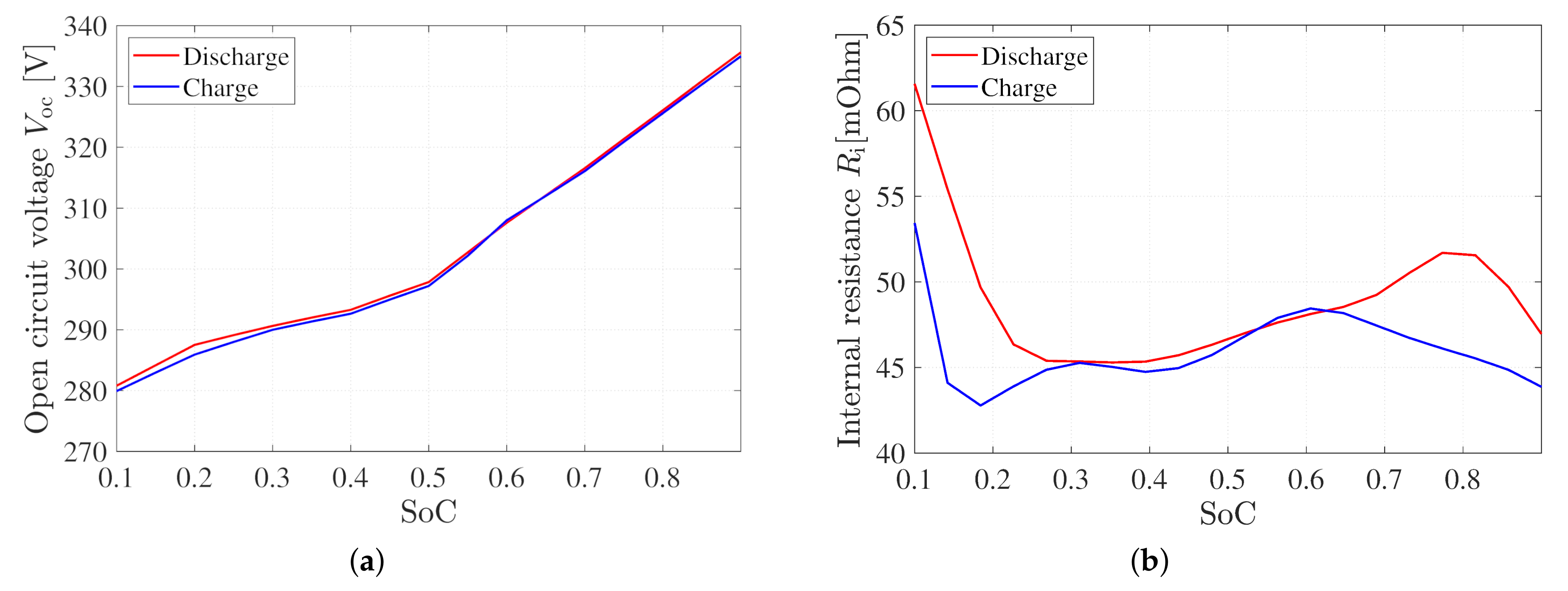
2.4. Battery

3. DC-Link Voltage Optimization
3.1. Problem Formulation
3.1.1. Vehicle Dynamics
3.1.2. DC-Link Voltage Operating Range
3.1.3. Dynamic Programming
4. Simulation Results and Discussion
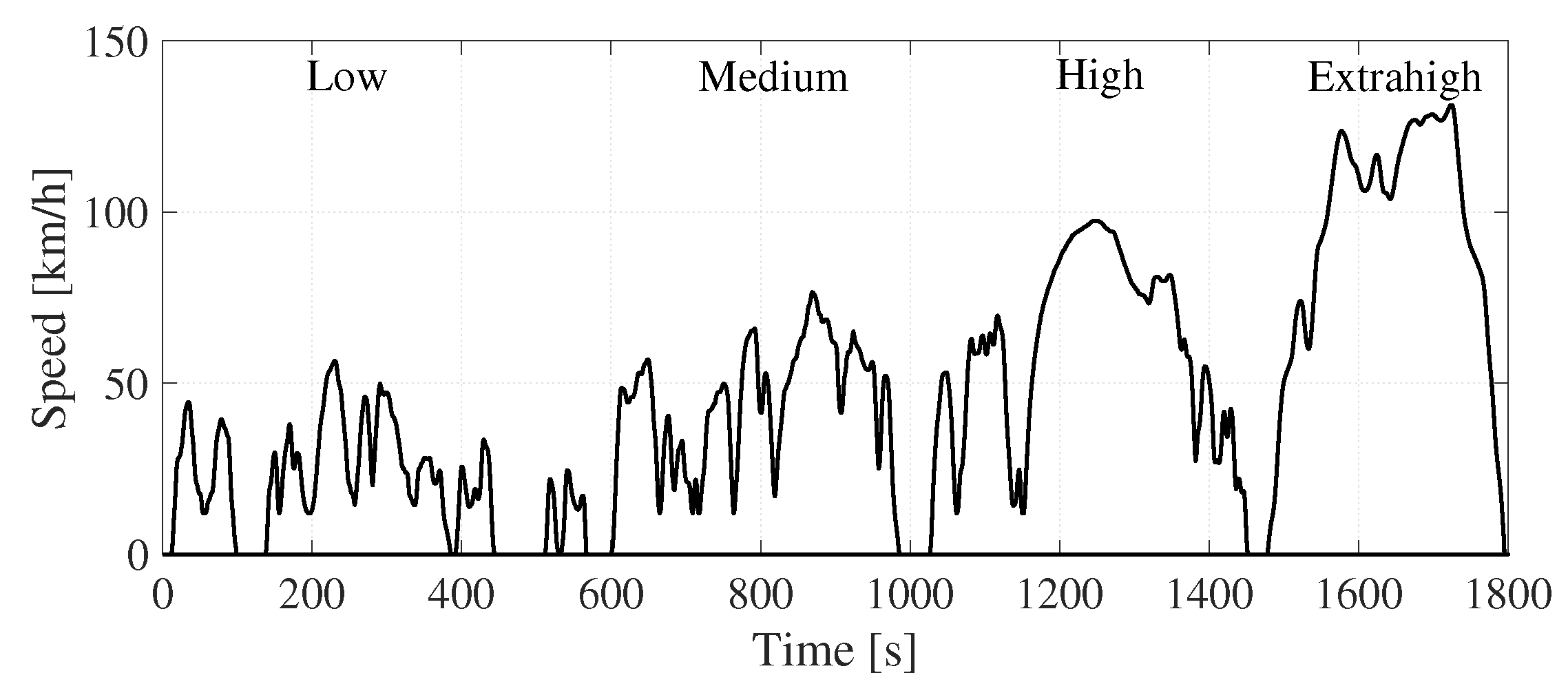
4.1. Drive Cycle Simulation Setup
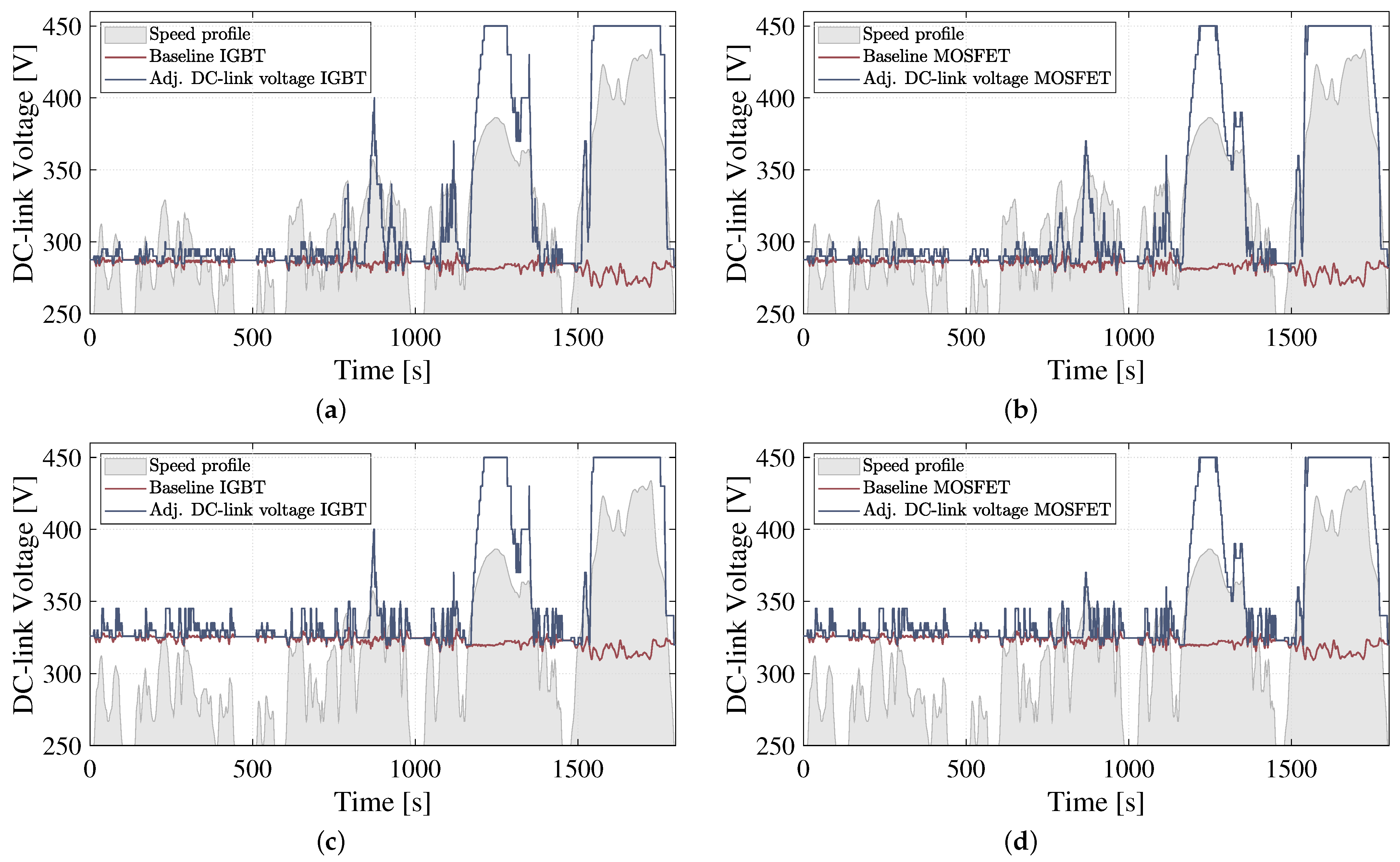
4.2. Optimized DC-Link Voltage

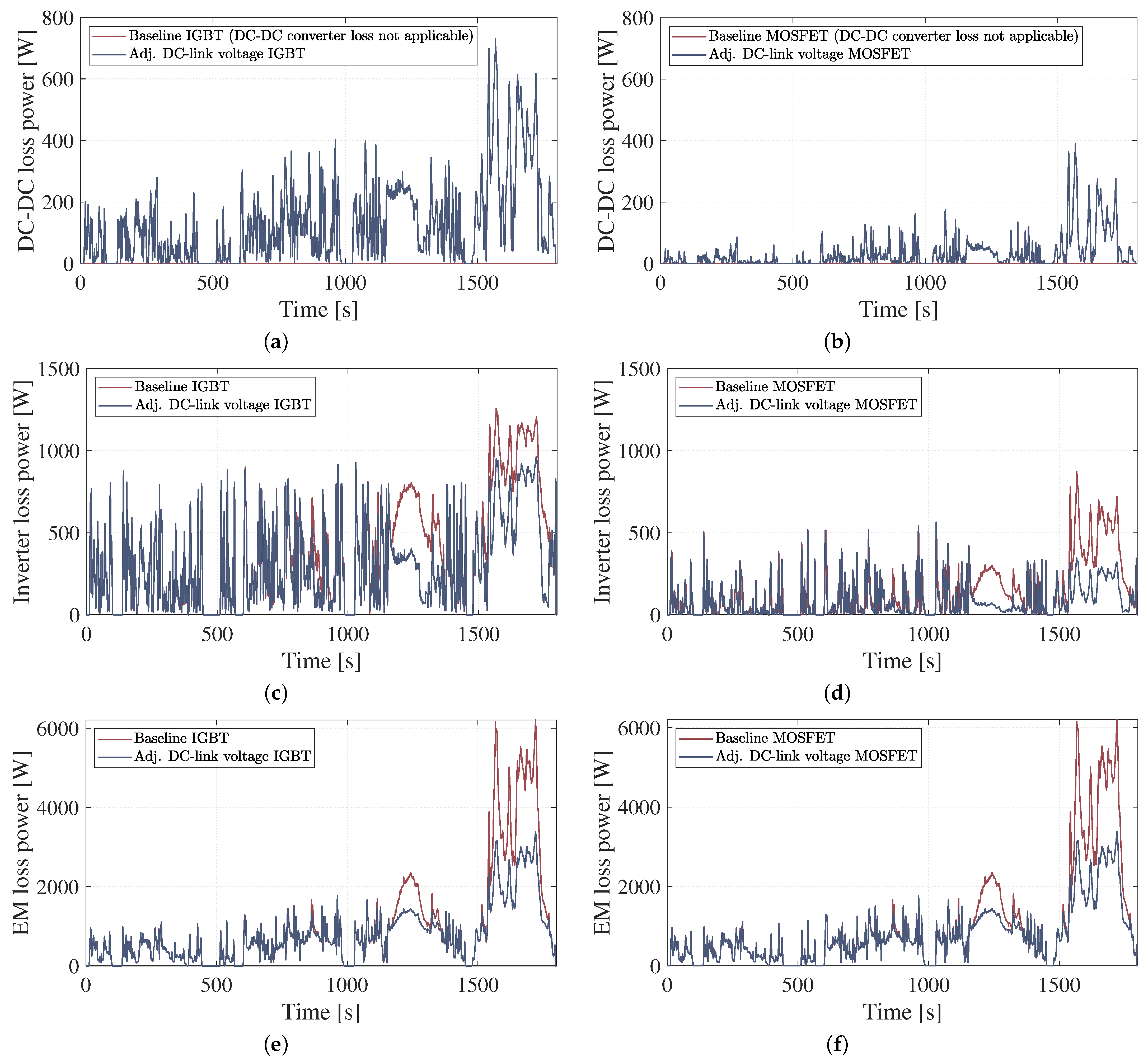
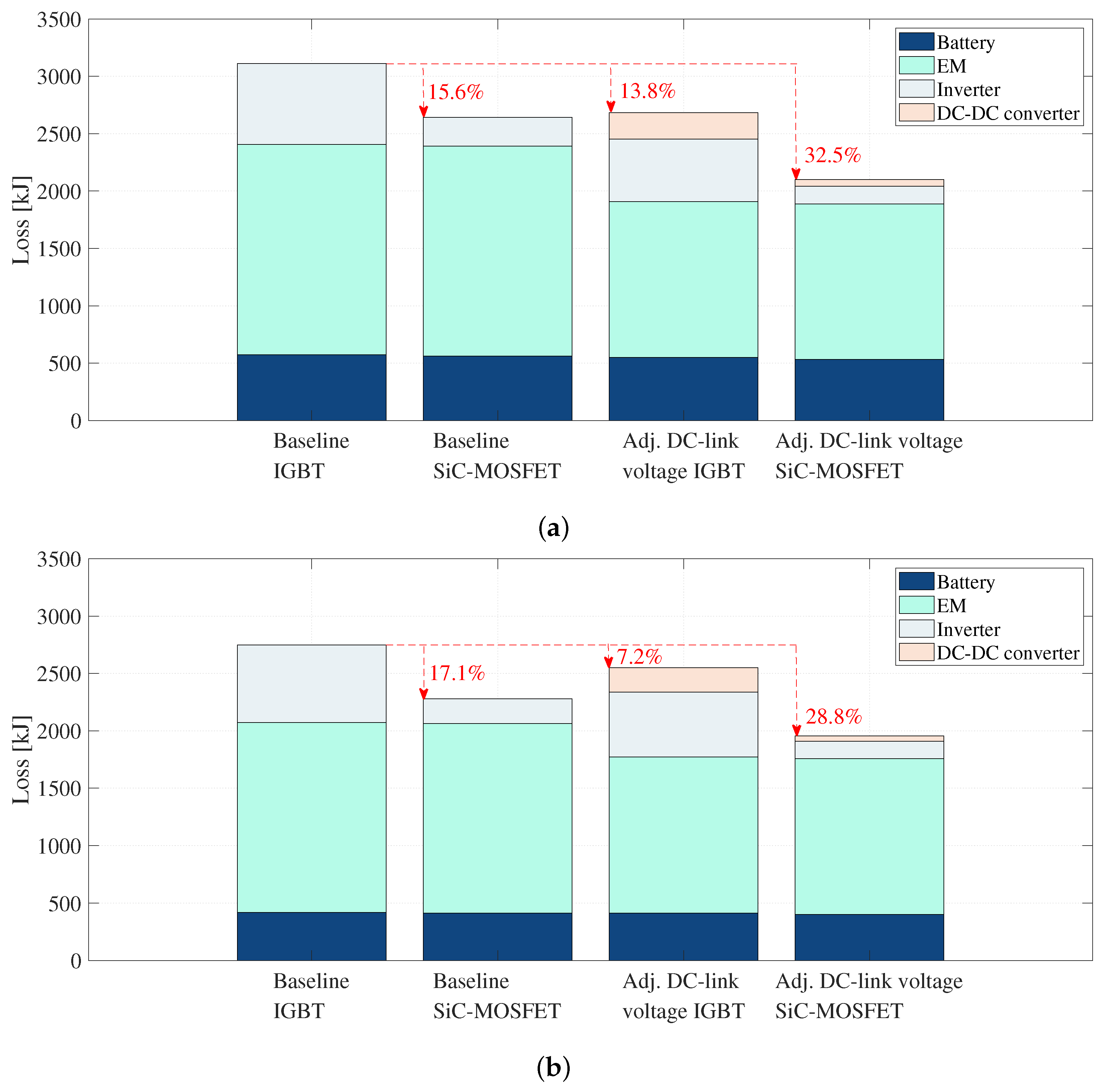
4.3. Energy Consumption and Breakdown of Energy Losses

5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Transistor | Operation | a | b | c | d |
|---|---|---|---|---|---|
| IGBT | Propulsion boost | ||||
| Regeneration buck | |||||
| MOSFET | Propulsion boost | - | |||
| Regeneration buck | - |
References
- Rietmann, N.; Hügler, B.; Lieven, T. Forecasting the trajectory of electric vehicle sales and the consequences for worldwide CO2 emissions. J. Clean. Prod. 2020, 261, 121038. [Google Scholar] [CrossRef]
- Nogueira, T.; Sousa, E.; Alves, G.R. Electric vehicles growth until 2030: Impact on the distribution network power. Energy Rep. 2022, 8, 145–152. [Google Scholar] [CrossRef]
- Buberger, J.; Kersten, A.; Kuder, M.; Eckerle, R.; Weyh, T.; Thiringer, T. Total CO2-equivalent life-cycle emissions from commercially available passenger cars. Renew. Sustain. Energy Rev. 2022, 159, 112158. [Google Scholar] [CrossRef]
- Sanguesa, J.A.; Torres-Sanz, V.; Garrido, P.; Martinez, F.J.; Marquez-Barja, J.M. A review on electric vehicles: Technologies and challenges. Smart Cities 2021, 4, 372–404. [Google Scholar] [CrossRef]
- Karki, A.; Phuyal, S.; Tuladhar, D.; Basnet, S.; Shrestha, B.P. Status of pure electric vehicle power train technology and future prospects. Appl. Syst. Innov. 2020, 3, 35. [Google Scholar] [CrossRef]
- Ghasemi-Marzbali, A.; Shafiei, M. Fast-charging station for electric vehicles, challenges and issues: A comprehensive review. J. Energy Storage 2022, 49, 104136. [Google Scholar]
- Deng, J.; Bae, C.; Denlinger, A.; Miller, T. Electric vehicles batteries: Requirements and challenges. Joule 2020, 4, 511–515. [Google Scholar] [CrossRef]
- Lee, J.H.; Won, C.Y.; Lee, B.K.; Kim, H.B.; Baek, J.H.; Han, K.B.; Chung, U.I. IPMSM torque control method considering DC-link voltage variation and friction torque for EV/HEV applications. In Proceedings of the 2012 IEEE Vehicle Power and Propulsion Conference, Seoul, Republic of Korea, 9–12 October 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 1063–1069. [Google Scholar]
- Lee, J.H.; Lee, J.H.; Park, J.H.; Won, C.Y. Field-weakening strategy in condition of DC-link voltage variation using on electric vehicle of IPMSM. In Proceedings of the 2011 International Conference on Electrical Machines and Systems, Beijing, China, 20–23 August 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1–6. [Google Scholar]
- Zhao, N.; Schofield, N.; Niu, W. Energy storage system for a port crane hybrid power-train. IEEE Trans. Transp. Electrif. 2016, 2, 480–492. [Google Scholar] [CrossRef]
- Sewergin, A.; Wienhausen, A.H.; Oberdieck, K.; De Doncker, R.W. Modular bidirectional full-SiC DC-DC converter for automotive applications. In Proceedings of the 2017 IEEE 12th International Conference on Power Electronics and Drive Systems (PEDS), Honolulu, HI, USA, 12–15 December 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 277–281. [Google Scholar]
- Kok, D.; Morris, A.; Knowles, M. Novel EV drive train topology—A review of the current topologies and proposal for a model for improved drivability. In Proceedings of the 2013 15th European Conference on Power Electronics and Applications (EPE), Lille, France, 2–6 September 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–10. [Google Scholar]
- Zhao, N.; Schofield, N.; Yang, R.; Gu, R. Investigation of DC-link voltage and temperature variations on EV traction system design. IEEE Trans. Ind. Appl. 2017, 53, 3707–3718. [Google Scholar] [CrossRef]
- Muta, K.; Yamazaki, M.; Tokieda, J. Development of new-generation hybrid system THS II-Drastic improvement of power performance and fuel economy. In Proceedings of the SAE 2004 World Congress & Exhibition, Detroit, MI, USA, 8–11 March 2004. SAE Technical Report. [Google Scholar]
- Burress, T.A.; Campbell, S.L.; Coomer, C.; Ayers, C.W.; Wereszczak, A.A.; Cunningham, J.P.; Marlino, L.D.; Seiber, L.E.; Lin, H.T. Evaluation of the 2010 Toyota Prius Hybrid Synergy Drive System; Technical Report; Oak Ridge National Lab (ORNL): Oak Ridge, TN, USA, 2011. [Google Scholar]
- Staunton, R.H.; Ayers, C.W.; Marlino, L.; Chiasson, J.; Burress, B. Evaluation of 2004 Toyota Prius Hybrid Electric Drive System; Technical Report; Oak Ridge National Lab (ORNL): Oak Ridge, TN, USA, 2006. [Google Scholar]
- Yamamoto, K.; Shinohara, K.; Makishima, H. Comparison between flux weakening and PWM inverter with voltage booster for permanent magnet synchronous motor drive. In Proceedings of the Power Conversion Conference-Osaka (Cat. No. 02TH8579), Osaka, Japan, 2–5 April 2002; IEEE: Piscataway, NJ, USA, 2002; Volume 1, pp. 161–166. [Google Scholar]
- Yamamoto, K.; Shinohara, K.; Nagahama, T. Characteristics of permanent-magnet synchronous motor driven by PWM inverter with voltage booster. IEEE Trans. Ind. Appl. 2004, 40, 1145–1152. [Google Scholar] [CrossRef]
- Yu, C.Y.; Tamura, J.; Lorenz, R.D. Optimum DC bus voltage analysis and calculation method for inverters/motors with variable DC bus voltage. IEEE Trans. Ind. Appl. 2013, 49, 2619–2627. [Google Scholar] [CrossRef]
- Lemmens, J.; Driesen, J.; Vanassche, P. Dynamic DC-link voltage adaptation for thermal management of traction drives. In Proceedings of the 2013 IEEE Energy Conversion Congress and Exposition, Denver, CO, USA, 15–19 September 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 180–187. [Google Scholar]
- Estima, J.O.; Cardoso, A.J.M. Efficiency analysis of drive train topologies applied to electric/hybrid vehicles. IEEE Trans. Veh. Technol. 2012, 61, 1021–1031. [Google Scholar] [CrossRef]
- Prabhakar, K.K.; Ramesh, M.; Dalal, A.; Reddy, C.U.; Singh, A.K.; Kumar, P. Efficiency investigation for electric vehicle powertrain with variable DC-link bus voltage. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 24–27 October 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1796–1801. [Google Scholar]
- Sridharan, S.; Krein, P.T. Optimizing variable DC link voltage for an induction motor drive under dynamic conditions. In Proceedings of the 2015 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 14–17 June 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–6. [Google Scholar]
- Tenner, S.; Gimther, S.; Hofmann, W. Loss minimization of electric drive systems using a DC/DC converter and an optimized battery voltage in automotive applications. In Proceedings of the 2011 IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 6–9 September 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1–7. [Google Scholar]
- Kumar, K.; Bertoluzzo, M.; Buja, G. Impact of SiC MOSFET traction inverters on compact-class electric car range. In Proceedings of the 2014 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Mumbai, India, 16–19 December 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–6. [Google Scholar]
- Nisch, A.; Klöffer, C.; Weigold, J.; Wondrak, W.; Schweikert, C.; Beaurenaut, L. Effects of a SiC TMOSFET tractions inverters on the electric vehicle drivetrain. In Proceedings of the PCIM Europe 2018, VDE International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management, Nuremberg, Germany, 5–7 June 2018; pp. 1–8. [Google Scholar]
- Rahimo, M.; Canales, F.; Minamisawa, R.A.; Papadopoulos, C.; Vemulapati, U.; Mihaila, A.; Kicin, S.; Drofenik, U. Characterization of a silicon IGBT and silicon carbide MOSFET cross-switch hybrid. IEEE Trans. Power Electron. 2015, 30, 4638–4642. [Google Scholar] [CrossRef]
- Jiang, D.; Burgos, R.; Wang, F.; Boroyevich, D. Temperature-dependent characteristics of SiC devices: Performance evaluation and loss calculation. IEEE Trans. Power Electron. 2011, 27, 1013–1024. [Google Scholar] [CrossRef]
- Acquaviva, A.; Rodionov, A.; Kersten, A.; Thiringer, T.; Liu, Y. Analytical conduction loss calculation of a mosfet three-phase inverter accounting for the reverse conduction and the blanking time. IEEE Trans. Ind. Electron. 2020, 68, 6682–6691. [Google Scholar] [CrossRef]
- Kersten, A.; Grunditz, E.; Thiringer, T. Efficiency of active three-level and five-level npc inverters compared to a two-level inverter in a vehicle. In Proceedings of the 2018 20th European Conference on Power Electronics and Applications (EPE’18 ECCE Europe), Riga, Latvia, 17–21 September 2018; IEEE: Piscataway, NJ, USA, 2018; p. P–1. [Google Scholar]
- Bierhoff, M.H.; Fuchs, F.W. Semiconductor losses in voltage source and current source IGBT converters based on analytical derivation. In Proceedings of the 2004 IEEE 35th Annual Power Electronics Specialists Conference (IEEE Cat. No. 04CH37551), Aachen, Germany, 20–25 June 2004; IEEE: Piscataway, NJ, USA, 2004; Volume 4, pp. 2836–2842. [Google Scholar]
- Zhu, Y.; Xiao, M.; Su, X.; Yang, G.; Lu, K.; Wu, Z. Modeling of conduction and switching losses for IGBT and FWD based on SVPWM in automobile electric drives. Appl. Sci. 2020, 10, 4539. [Google Scholar] [CrossRef]
- Yin, S.; Tseng, K.J.; Simanjorang, R.; Tu, P. Experimental comparison of high-speed gate driver design for 1.2-kV/120-A Si IGBT and SiC MOSFET modules. IET Power Electron. 2017, 10, 979–986. [Google Scholar] [CrossRef]
- Amirpour, S.; Thiringer, T.; Hagstedt, D. Energy Loss Analysis in a SiC/IGBT Propulsion Inverter over Drive Cycles Considering Blanking time, MOSFET’s Reverse Conduction and the Effect of Thermal Feedback. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1505–1511. [Google Scholar]
- Lai, X.; Wang, S.; Ma, S.; Xie, J.; Zheng, Y. Parameter sensitivity analysis and simplification of equivalent circuit model for the state of charge of lithium-ion batteries. Electrochim. Acta 2020, 330, 135239. [Google Scholar] [CrossRef]
- Estaller, J.; Kersten, A.; Kuder, M.; Mashayekh, A.; Buberger, J.; Thiringer, T.; Eckerle, R.; Weyh, T. Battery impedance modeling and comprehensive comparisons of state-of-the-art cylindrical 18650 battery cells considering cells’ price, impedance, specific energy and c-rate. In Proceedings of the 2021 IEEE International Conference on Environment and Electrical Engineering and 2021 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Bari, Italy, 7–10 September 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–8. [Google Scholar]
- Estaller, J.; Kersten, A.; Kuder, M.; Thiringer, T.; Eckerle, R.; Weyh, T. Overview of Battery Impedance Modeling Including Detailed State-of-the-Art Cylindrical 18650 Lithium-Ion Battery Cell Comparisons. Energies 2022, 15, 3822. [Google Scholar] [CrossRef]
- Du, C.; Huang, S.; Jiang, Y.; Wu, D.; Li, Y. Optimization of energy management strategy for fuel cell hybrid electric vehicles based on dynamic programming. Energies 2022, 15, 4325. [Google Scholar] [CrossRef]
- Maino, C.; Misul, D.; Musa, A.; Spessa, E. Optimal mesh discretization of the dynamic programming for hybrid electric vehicles. Appl. Energy 2021, 292, 116920. [Google Scholar] [CrossRef]
- Dou, H.; Zhang, Y.; Fan, L. Design of optimized energy management strategy for all-wheel-drive electric vehicles. Appl. Sci. 2021, 11, 8218. [Google Scholar] [CrossRef]
- Naseri, F.; Schaltz, E.; Stroe, D.I.; Gismero, A.; Farjah, E. An enhanced equivalent circuit model with real-time parameter identification for battery state-of-charge estimation. IEEE Trans. Ind. Electron. 2021, 69, 3743–3751. [Google Scholar] [CrossRef]
- Themann, P.; Eckstein, L. Prediction of driver behaviour by situational models in a cooperative environment to optimize energy efficiency. In Proceedings of the 9th ITS European Congress, Dublin, Ireland, 4–7 June 2013. [Google Scholar]
- Zhu, Z.; Gupta, S.; Pivaro, N.; Deshpande, S.R.; Canova, M. A GPU implementation of a look-ahead optimal controller for eco-driving based on dynamic programming. In Proceedings of the 2021 European Control Conference (ECC), Rotterdam, The Netherlands, 29 June–2 July 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 899–904. [Google Scholar]
- Kersten, A.; Oberdieck, K.; Bubert, A.; Neubert, M.; Grunditz, E.A.; Thiringer, T.; De Doncker, R.W. Fault detection and localization for limp home functionality of three-level NPC inverters with connected neutral point for electric vehicles. IEEE Trans. Transp. Electrif. 2019, 5, 416–432. [Google Scholar] [CrossRef]
- Zaccardi, J.M.; Le Berr, F. Analysis and choice of representative drive cycles for light duty vehicles–case study for electric vehicles. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2013, 227, 605–616. [Google Scholar] [CrossRef]
- Semon, A.; Crăciunescu, A. Study to Increase the Efficiency of the Electric Drive System of a Vehicle at Different Speeds. In Proceedings of the 2019 11th International Symposium on Advanced Topics in Electrical Engineering (ATEE), Bucharest, Romania, 28–30 March 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–7. [Google Scholar]







| Parameters | Description | Value | Unit |
|---|---|---|---|
| Number of slots | 48 | - | |
| Number of poles | 8 | - | |
| DC-link voltage | 350 | V | |
| Peak current | 820 | A | |
| Base speed | 3500 | RPM | |
| Maximum speed | 14,000 | RPM |
| Parameters | Description | Value | Unit |
|---|---|---|---|
| m | Vehicle mass | 2640 | kg |
| Aerodynamic resistance coefficient | 0.372 | - | |
| Frontal area | 2.8 | ||
| Tire rolling radius | 377 | mm | |
| Tire rolling resistance coefficient | 0.01 | - |
| The DP Algorithm for calculating the optimal DC-link voltage |
|---|
| Step 1: Grid generation |
| Define state variable (battery SoC) grid and control variable (DC-link voltage) grid . |
| Step 2: Initialization |
| Set initial SoC and define the constraints of the problem. |
| Step 3: Discretization |
| At the stage of the time step k, set battery SoC input and calculate the EM operating points (,). Based on the sign of the torque, , select the coefficients for polynomial Equations (15) or (16) listed in Table A1 for propulsion and regeneration cases, as well as the battery resistance on the and space grid. |
| Step 4: Determine battery current |
| Solve (15) or (16) and remove the infeasible roots to obtain the estimated battery current, . Then, calculate the battery terminal voltage using (8) and remove the infeasible solutions where is smaller than DC-link voltage . |
| Step 5: Choose the optimal output at k-th stage |
| Find out the optimal DC-link voltage with the minimum cost function, given in (18), at the current stage. |
| Step 5: Update |
| Update based on the obtained . |
| Init. SoC | Powertrain | Battery [kJ] | DC-DC [kJ] | Inverter [kJ] | EM [kJ] | Energy Cons. [kWh/100 km] | Diff |
|---|---|---|---|---|---|---|---|
| 20% | Baseline IGBT | 574.41 | - | 705.08 | 1830.90 | 20.28 | - |
| Adj. DC-link voltage IGBT | 550.63 | 229.69 | 545.67 | 1356.46 | 19.77 | 2.51% | |
| 20% | Baseline MOSFET | 561.47 | - | 250.95 | 1829.64 | 19.72 | - |
| Adj. DC-link voltage MOSFET | 532.94 | 57.60 | 156.76 | 1353.42 | 19.08 | 3.25% | |
| 80% | Baseline IGBT | 420.95 | - | 675.05 | 1652.12 | 19.85 | - |
| Adj. DC-link voltage IGBT | 412.51 | 213.47 | 566.729 | 1358.52 | 19.62 | 1.16% | |
| 80% | Baseline MOSFET | 413.34 | - | 214.79 | 1651.31 | 19.29 | - |
| Adj. DC-link voltage MOSFET | 402.26 | 47.58 | 150.45 | 1356.40 | 18.92 | 1.92% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Y.; Kersten, A.; Klacar, S.; Sedarsky, D. Maximizing Efficiency in Smart Adjustable DC Link Powertrains with IGBTs and SiC MOSFETs via Optimized DC-Link Voltage Control. Batteries 2023, 9, 302. https://doi.org/10.3390/batteries9060302
Xu Y, Kersten A, Klacar S, Sedarsky D. Maximizing Efficiency in Smart Adjustable DC Link Powertrains with IGBTs and SiC MOSFETs via Optimized DC-Link Voltage Control. Batteries. 2023; 9(6):302. https://doi.org/10.3390/batteries9060302
Chicago/Turabian StyleXu, Yu, Anton Kersten, Simon Klacar, and David Sedarsky. 2023. "Maximizing Efficiency in Smart Adjustable DC Link Powertrains with IGBTs and SiC MOSFETs via Optimized DC-Link Voltage Control" Batteries 9, no. 6: 302. https://doi.org/10.3390/batteries9060302