1. Introduction
The use of polymer and colloid microparticles is becoming increasingly widespread. In addition to more common applications [
1], such as paints, coatings and fractionating columns, emerging applications like optical devices [
2], controlled-release drug delivery systems [
3,
4] and disease diagnosis systems [
5] are gaining more and more strength, and while microspheres have been used extensively, non-spherical particles with predetermined anisotropic features are paving the way for the development of new technologies. These technologies include the synthesis of photonic crystals [
4] and multiplexed diagnostics microlabs for disease control [
6,
7]. However, synthesizing these particles is not a simple task. The emulsion polymerization and suspension polymerization processes based on traditional approaches, which are commonly used to synthesize polymer particles, do not ensure a proper control over morphology and anisotropy, which are crucial aspects in the design of non-spherical particles.
Ideally, synthesis processes of such complex particles produce large numbers of monodispersed particles with predetermined anisotropic shapes and properties. In addition, the process allows for the use of functionalizable and biocompatible materials depending on the application requirements. In recent years, various processes focusing on microflows to synthesize particles have been reported in the literature [
8]. These methods involve the convergence of two substances of different phases flowing into synthesizing devices, typically T-shaped cylindrical tubes [
9,
10] or other converging geometrical shapes [
11,
12]. This setup enables the formation of a large number of monodispersed droplets [
9,
13] of a precursor monomer for the desired polymer. The next step involves light or thermally induced polymerization into solid droplets [
14,
15]. However, these methods are significantly limited in terms of the shapes obtained, which typically comprise spheres or sphere-like shapes such as discs [
16,
17], half-spheres, core-shell spheres [
18] and obloids [
19,
20,
21].
New techniques are currently being explored to enhance resolution without compromising the number of synthesized particles. In particular, stop-flow lithography (SFL) is one such technique. This method induces particle formation between two monomer flows, which are brought to a stop within the PDMS microchannel before being flushed out, and this process is repeated cyclically. The efficiency of SFL is closely related to the response of the microflow system to pressure changes, enabling control over the flow frequency in each cycle. One approach employed to control the frequency uses pulsed compressed airflows instead of syringe pumps, thus shortening the response times. Nevertheless, the response time is not instantaneous due to the deformation caused by the airflow pressure on the PDMS elastomer (microchannel) walls. Given the increased use of PDMS in constructing microfluidic channels, it becomes imperative to study the effect of wall deformation on the monomer flow pattern.
The effects of wall deformation in a steady-state rectangular microchannel on the monomer flow profile have been extensively studied [
22,
23,
24,
25,
26,
27,
28,
29,
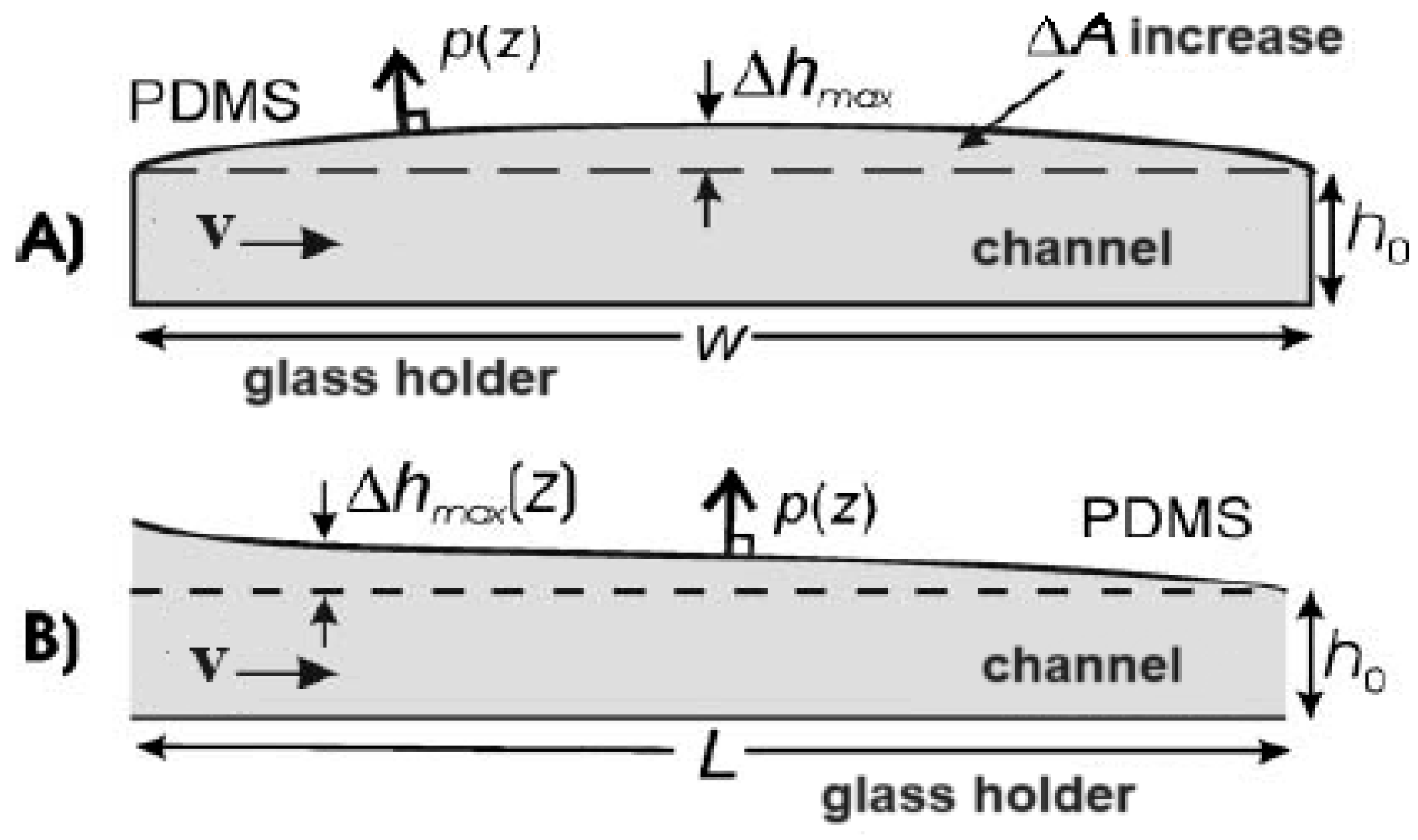
30]. However, the effects on the flow profile of a non-Newtonian monomer due to the dynamic behavior of the walls and the geometry of the PDMS microchannel when subject to external pressure pulses have not been thoroughly addressed. Therefore, it is important to study this behavior in a cyclic process and determine the time required to reach a steady-state condition for the full cycle. In our study, we use a power-law model to describe the effect of the PDMS elastomer walls of a rectangular microchannel on the flow profile of a viscous non-Newtonian fluid in an SFL process (see
Figure 1).
Stop-Flow Lithography (SLF) System
Microflow devices usually utilize syringe pumps to inject an incompressible fluid into the device. Inflow through the needle causes flow transitions that may last several minutes in the case of systems on a micrometric scale [
27]. Therefore, when a rapid dynamic response is desired, the use of compressed air to inject the fluids into the device is preferable [
28]. Even though compressed airflow devices eliminate the pulse pressure gradient transition, there are still finite transitions associated with the PDMS wall deformation.
Three cyclic stages are identified in stop-flow lithography, namely flow interruption, polymerization and fluid flow. During the first stage, thrust pressure on the oligomer stream through the device is stopped, transitioning from a specified entry pressure determined by the compressed air device to atmospheric pressure. The flow takes a finite time to stop, which is a function of the time required for the PDMS channel to retract due to deformation and then regain its non-deformed rectangular cross-section and flush the fluid out of the device. During the second stage, oligomer particles are polymerized during the flow stop, exposing them to UV light by briefly opening (during 0.3 to 1 s) the lamp shutter. During the third stage, the parent particle flows due to the opening of the three-way valve, causing the pressure to change from atmospheric pressure to that of the specified entry pressure. Three specific times can be characterized in this process: the time of flow residence in the channel (), i.e., the time when flow is stopped (where time of wall response ), the time required to begin particle polymerization (i.e., the shutter time ) and the time required to flush the particles out, . While and are easily determined, can only be determined after the first estimation of that works as a lower bound for the stop time.
3. Results
For the case of a Newtonian (
) fluid, the solution is compared with the experimental data provided by Dendukuri et al. [
24] for an oligomer consisting of Poly(ethylene glycol) diacrylate PEG-DA with viscosity
mPa s. The case with
and
, corresponding to pseudoplastic fluids, is compared with data reported by Bird et. al. [
25] for carboxymethyl cellulose at
and
% weight/volume in water at
C with
and
dyn
, respectively. Finally, for
, corresponding to a dilatant fluid, the results are compared with data obtained from the Molecular Pharmacy and Controlled Release Laboratory (Internal Technical Report) of the Autonomous Metropolitan University, Xochimilco Campus, for a glucose solution at 6%,
C and
dyn
.
The approximate solution provided by Equations (15)–(20) allows for a direct estimation of the effects of the channel height, width and length on the response time along with the dependence of the response time of the channel elastic wall on fluid pressure at the entrance of the channel. In addition, the results obtained show the effects of each of these variables separately. This is possible because of the lubrication approximation technique used, which, on the other hand, provides a simple model for the qualitative description of all factors involved.
The results of the present model for
(Newtonian fluid) and different channel widths (
, 200, 500 and 1000
m) as compared with the experimental data obtained by Dendukuri et al. [
24] (filled dots) are depicted in
Figure 3. The model fits qualitatively well with the linear trend of the experimental data and predicts the response time. In terms of the root-mean-square error (RMSE), the experimental measurements are predicted with an error close to 6.4%. As the channel width is increased, the pressure applied due to deformation of the channel elastic wall decreases, which in turn causes an increase in the response time.
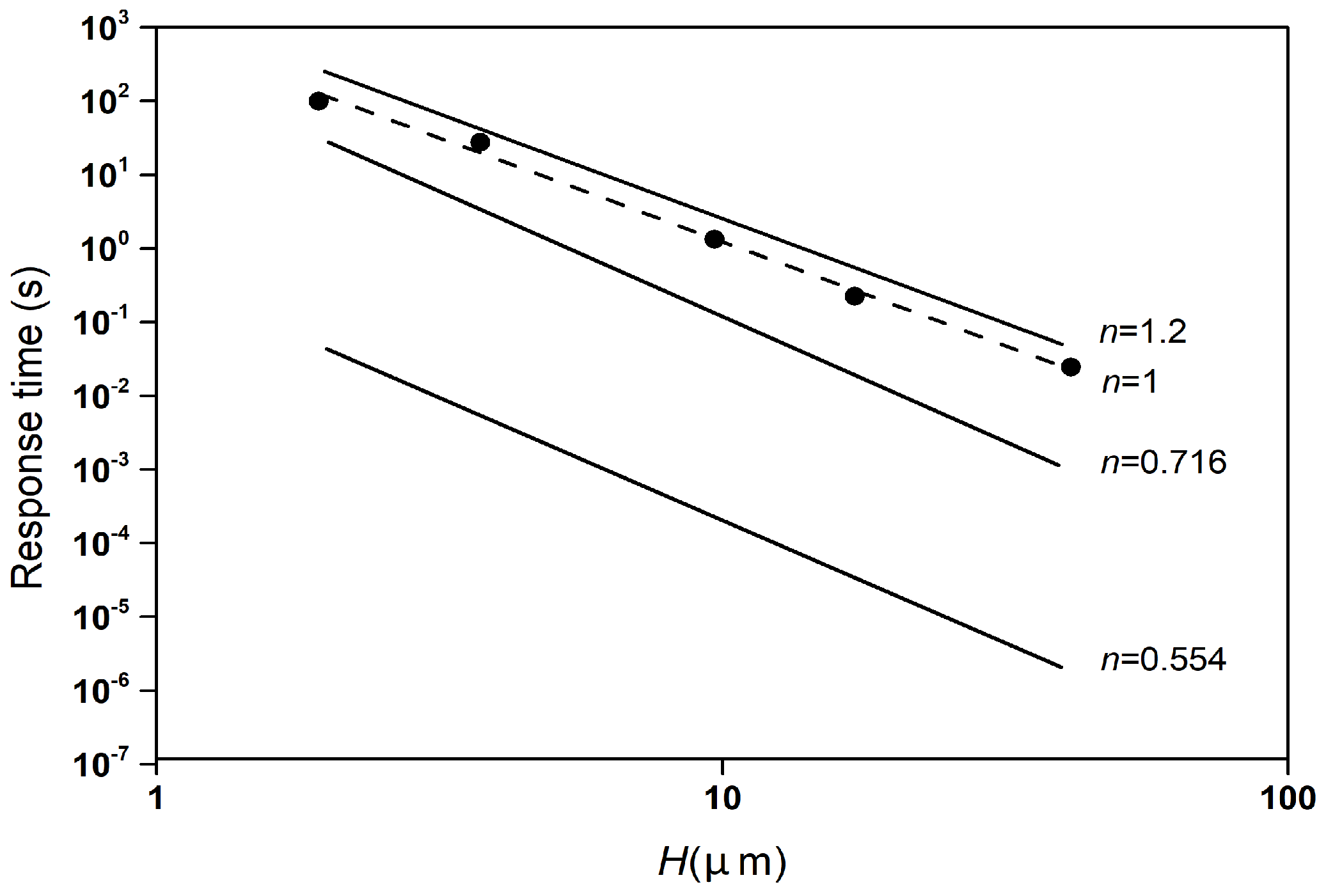
Figure 4 shows the dependence of the response time on channel height for
as predicted by the model (dashed line). The results are compared with Dendukuri et al.’s [
24] experimental data for
, 10, 20 and 40
m (filled dots). The model reproduces the experimental linear trend with a 3 s
slope. Increasing the channel width causes a reduction in the recovery stress of the channel elastic wall, with a consequent increase in the response time. In this case, the model prediction matches the experimental data with a RMSE of less than about 10%. The response times for the pseudoplastic and dilatant fluids as predicted by the model are also depicted (solid lines). As for the
case, the response time also decreases with
H for a power-law fluid. In particular, for the dilatant case (
) the linear decrease closely follows a 3 s
slope, while for the pseudoplastic fluids (
and 0.716), the linear decrease follows a 2.82 s
slope. However, compared to the Newtonian and dilatant power-law fluids, the response time for the
pseudoplastic fluid is reduced by about four orders of magnitude, while for the
case, the reduction is approximately of an order of magnitude. In passing, we note that the response time experienced by the dilatant fluid is only slightly longer than the one experienced by the Newtonian (
) fluid. As the channel height is reduced, the response time of the system increases. This occurs because in channels of a smaller height, there is a greater flow resistance that the fluid must overcome when it is flushed away from the channel.
The effects of the channel length on the wall response time are displayed in
Figure 5. For
, the response times also fit the experimental data for varying channel lengths (i.e., 0.25, 0.5, 1 and 1.2 cm), all with a constant channel width of 200
m, height of 10
m and pressure 3 psi. The response time for both the Newtoninan and the dilatant fluid increases linearly following a 2 s
slope. No difference is actually observed between both trends. In contrast, for the pseudoplastic fluids, the response time also increases linearly but this time with a 3.25 s
slope for
and 3 s
for
. Moreover, compared to the Newtonian and dilatant fluids, the response times for the pseudoplastic fluids are an order of magnitude smaller than for the former cases. As expected, the response time is always seen to increase with the length of the channel. The shorter wall response times shown by the pseudoplastic fluids (
and 0.716) in
Figure 4 and
Figure 5 compared to the Newtonian (
) and dilatant fluids (
) may be due to the fact that the former fluids lower their viscosity when subjected to large shear rates.
The dependence of the response time on the applied pressure at the entrance of the channel for the Newtonian fluid (dashed line) as compared with the experimental data of Dendukuri et al. [
24] (filled dots) is shown in the top-left frame of
Figure 6. In fair agreement with the experimental measurements, the response time is almost invariant to changes in the applied pressure. The experimental data exhibit scattered values of the response time about the predicted line with small departures from it. Despite the scatter of the experimental data, the actual RMSE distance between the predicted values and the experimental measurements is less than
%. This also evidences an approximate invariance with the applied pressure. In general, this behavior is expected in situations where the height deformation is small. However, a pressure increase above 15 psi causes significant deformation in the channel walls, which in turn causes an increase in the channel wall recovery elastic stress. This elastic stress increase is compensated when a larger liquid volume is expelled. The balance between elastic and viscous forces causes the response time to be pressure-independent for small deformations. Finally, the response time changes as a function of the
-ratio associated with the visco-elastic characteristics of the system. This means that if an oligomer of low viscosity is used, or a more rigid PDMS device is built, the response time will be consequently smaller.
The top-right, bottom-left and bottom-right frames of
Figure 6 show the wall response time as a function of the applied pressure at the entrance of the channel for the
(dilatant) and the
and 0.554 (pseudoplastic) fluids, respectively. In particular, the response time for the dilatant fluid decreases as the pressure is increased and is about an order of magnitude higher than that experienced by the Newtonian fluid at low pressures. For the pseudoplastic fluids (
and 0.554), the response time is from two to five orders of magnitude shorter than for the Newtonian case. The response time follows a trend similar to that displayed by the dilatant fluid, with larger values at low pressures. However, the differences between low and high pressures is so small that in general the response time for these fluids can be considered to remain almost invariant with pressure.
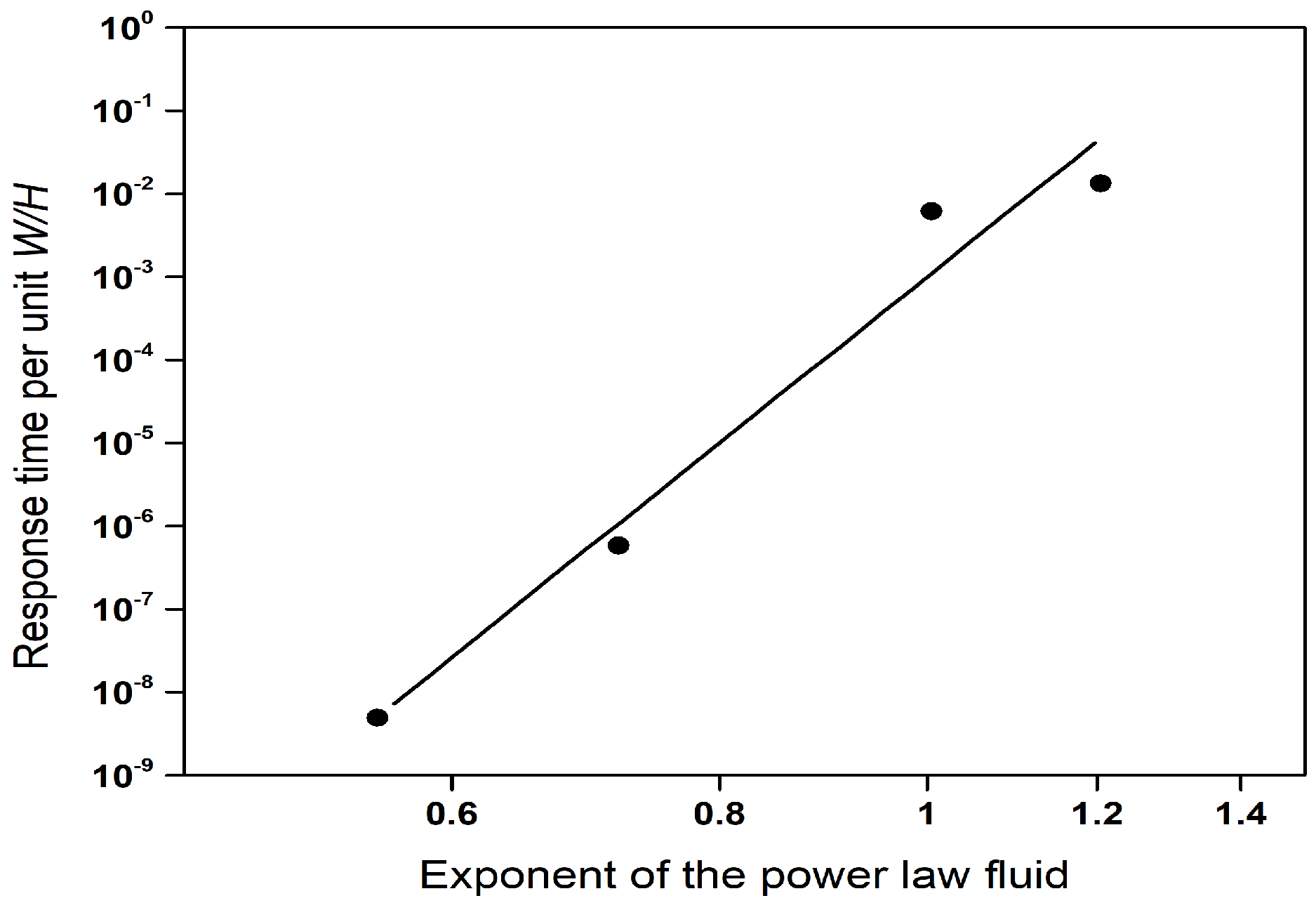
The predicted response time per unit applied pressure as a function of the exponent of the power-law fluid model (solid line) is shown in
Figure 7. The predicted values match very well with the experimental data for
with negligible relative errors. For
, the predicted value differs from the experimental measurement by a relative error of
%. The worst case occurs for
, where the error grows to
%. The response time increases exponentially for power-law fluids with
and is very sensitive to changes in the fluid viscosity. On the other hand,
Figure 8 shows the functional dependence of the response time on the channel width to height ratio,
. In general, the response time increases linearly with increasing the
ratio. In all cases, the linear increase has an approximate 2.5 s slope as a result of the reduction in the deformation curvature of the channel rectangular area. The response times of the Newtonian and dilatant fluids are similar and converge to the same values at high values of the
ratio. For the pseudoplastic fluids, however, the response times are about four (
) and six (
) orders of magnitude lower than those of the Newtonian and dilatant fluids. Moreover, the functional dependence of the model computed response time per unit
ratio on the exponent of the power-law fluid (solid line) is shown in
Figure 9 as compared with experimental data from Dendukuri et al. [
24] for
, Bird et al. [
25] for
and present authors for
. Sharp variations for more than seven orders of magnitude occurs when the exponent changes from 0.554 (for a pseudoplastic fluid) to 1.2 (for a dilatant fluid). The best fit of the numerical data deviates from the model prediction by a RMSE of
, i.e., by approximately 1.6%.
Figure 10 shows the degree of deformation of the dimensionless channel height as a function of the dimensionless channel length for the power-law fluids analyzed for response times of 0.01 and 0.1 s and
ratios of 2.5 and 10. In particular, the top-left, top-right, bottom-left and bottom-right frames show the variation in the channel height for the
,
,
and
fluids, respectively. The model predicts a maximum deformation of 20% when the response time is 0.01 s and
, which is in line with Dendukuri et al.’s [
24] and Gervais et al.’s [
23] experimental data.
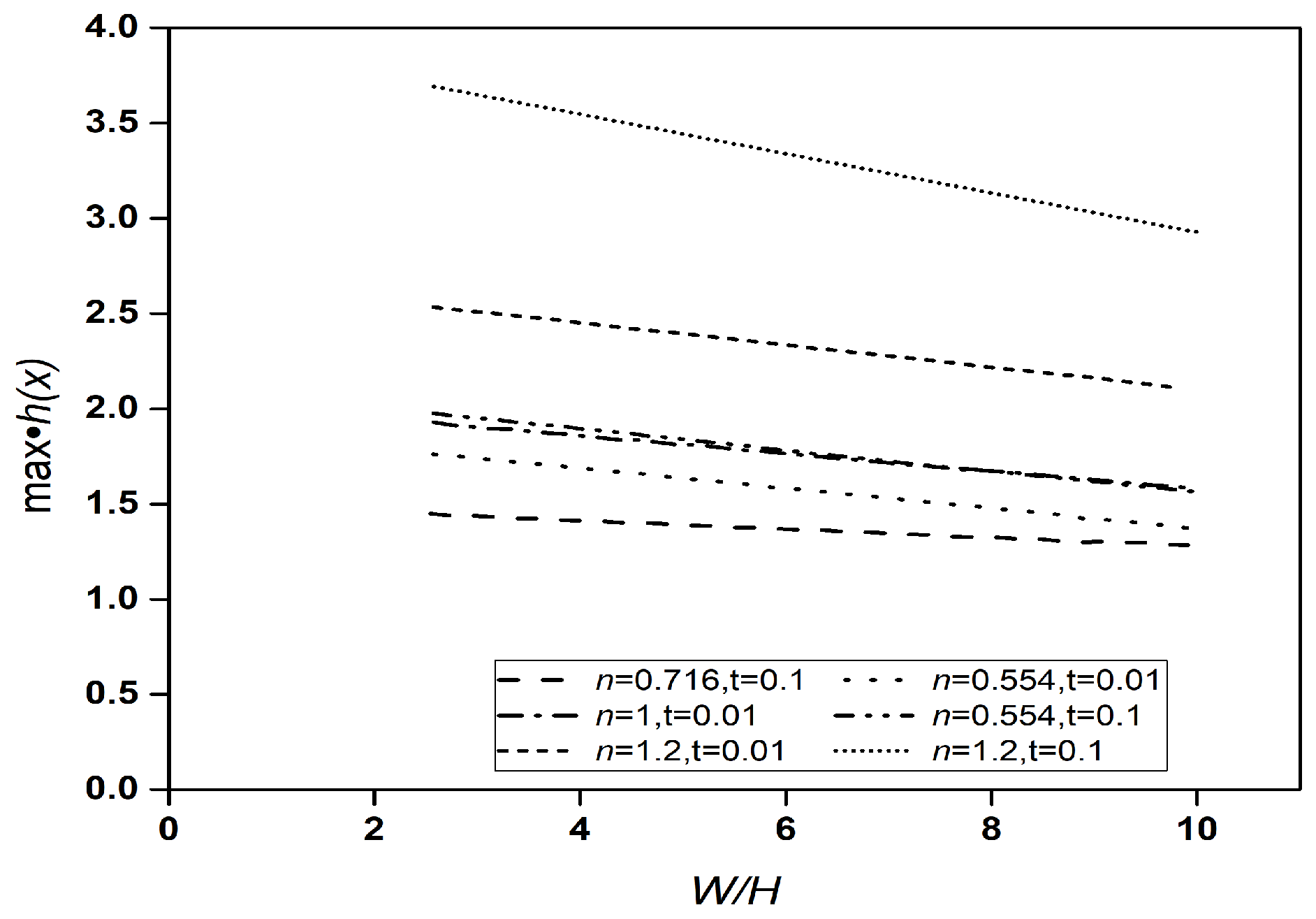
The variation in the deformation of the channel height with the
ratio is displayed in
Figure 11 for all fluids analyzed and two different response times (
and 0.1 s). In general, the height deformation decreases with increasing
ratios. Evidently, as the deformation area increases, the maximum channel deformation is reduced. Furthermore, the level of deformation increases with the response time. The model also predicts a dependence of the maximum deformation on the exponent of the power-law fluid. In particular, the dilatant (
) fluid causes a deformation,
, from 2.5 to 3 times the non-deformed height,
H, of the channel. On the other hand, the deformation for the Newtonian and pseudoplastic (
) fluids is from 0.2 to 0.8 times
H, while for the
pseudoplastic fluid, the change is only from 0.12 to 0.6 times
H. As opposed to pseudoplastic fluids, dilatant fluids become more viscous as more shear is applied. Therefore, they may cause an increase in the response time as they move slowly across the channel, thereby inducing a larger channel deformation. This could explain why the maximum height deformation is considerably larger for
.
4. Discussion
When analyzing separately the effects of the channel dimensions on the response time for different power-law fluids, we found that as the channel height increases, with all other geometric variables remaining constant, the response time decreases for all power-law fluids analyzed. However, the response time as a function of the type of fluid varies up to four orders of magnitude. This is due to changes in the flow resistance that must be overcome by the fluid when flushed out from the channel. This effect is better evidenced by the behavior of the response time as a function of the ratio. As this ratio increases, the maximum height deformation decreases, causing the response time to increase.
It was also found that for power-law fluids with , the maximum channel deformations were of 16–80% of the initial height, while for fluids with , the model-predicted deformation falls to between 2.5 and 3 times greater than the channel initial height. This is due to the influence of the fluid characteristics on the behavior of the fluid.
An increase in the exponent of the power-law fluid to causes an increase in the response time as well as an increase in the maximum deformation of the channel height compared with a Newtonian fluid (). This is because fluids with move more slowly across the channel, thereby causing the response time and the stress of the fluid on the elastic wall of the channel to increase.
Finally, it is important to mention that the balance between the elastic forces on the wall and the viscous forces of the fluid ensures that the response time is independent of the stress applied to the fluid at the entrance of the channel, especially when the deformations are small so that the response time varies as a function of the ratio. Rigid PDMS devices will allow making changes in the response time so as to reduce it to a minimum. This favors the use of channels with shorter lengths and larger flow stresses at the entrance (within mechanical stability limits). These are optimal characteristics to obtain a fast and dynamic response in the operation and design of a stop-flow lithography device. Therefore, the present results have practical implications in the development of pharmaceutical microfluidic devices. Other practical applications of these microfluidic systems may include nanoparticle preparation, drug encapsulation and delivery, culture and development of stem cells as well as cell analysis and diagnosis. In the biomedical field they can be used as micro-heat pumps and sinks, in DNA analysis, Lab-on-a-chip, urinary analysis and droplet generation among many other applications, while in chemical engineering, they are used as microreactors and in the synthesis of functional materials. Many other potential applications can be found in other fields such as, for example, medicine, food engineering, biology and chemistry.

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










