With a patient-specific application in mind, the discretization method to be used has to handle different configurations corresponding to various patients effortlessly. Moreover, input (the diversity of arterial cross-section geometries) and output (the solution in terms of deformation, strains, and stresses) data are to be expressed in homogeneous formats to ease the analysis and the possible application of reduced-order models. Here, level sets defined on a background mesh (discretizing a background domain ) describe the diversity of the geometric configurations, that is, all the possible instances of the actual computational domain, . It comes naturally to solve the problem with an unfitted approach. Specifically, it uses the background mesh not only to describe the geometry (actually the same background mesh for all the possible geometries) but also to compute the solution, following an IB methodology. Thus, one may prescind the conformal meshes adapted to the geometry that change from case to case. Note that to solve the problem with conformal finite elements, the mesh must be such that it tallies with , matching the boundary . Such an approach requires ad-hoc meshing algorithms, especially for convoluted geometries, and complicates comparing different configurations and their solutions.
2.1. Problem Statement
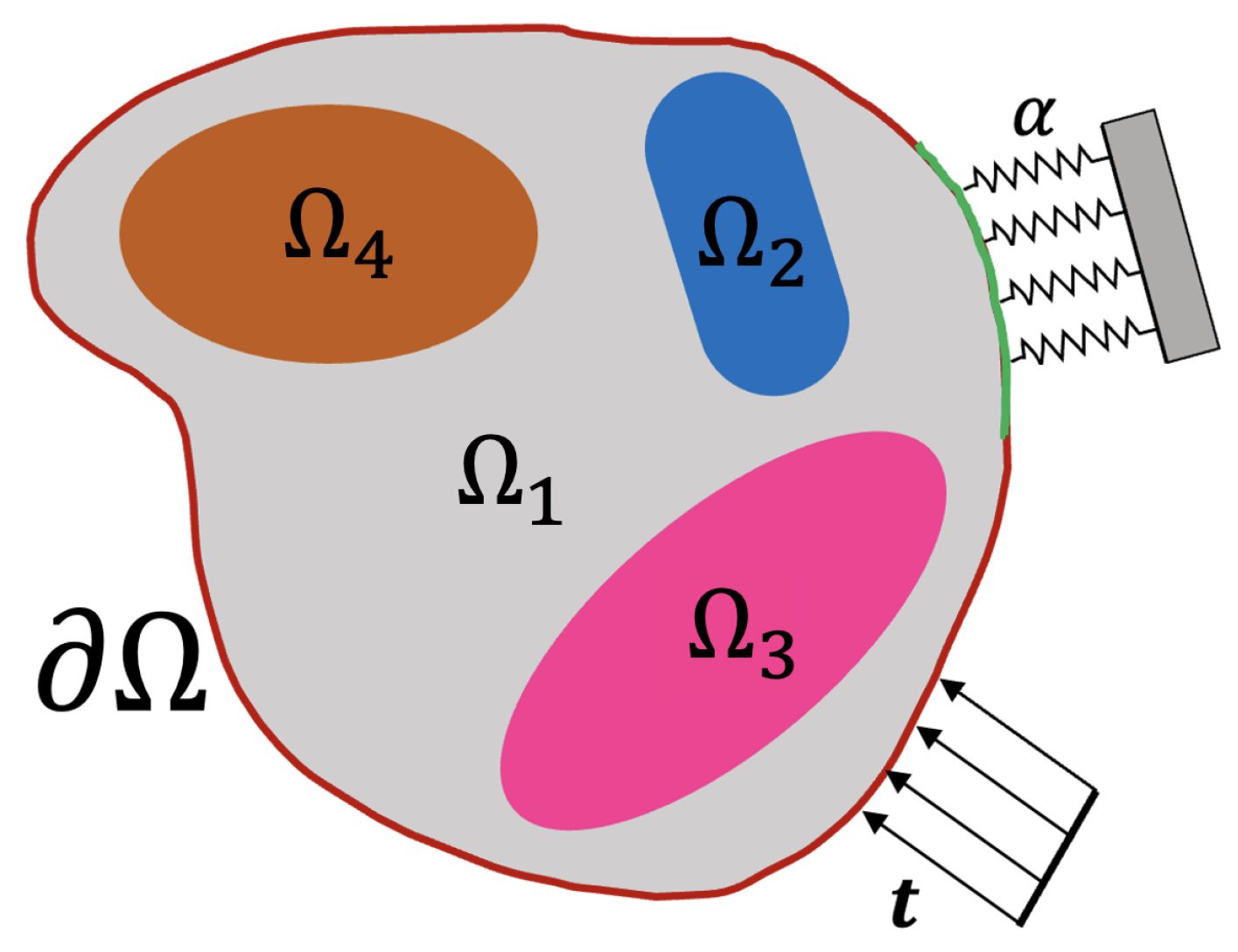
Let the section occupy a region
with boundary
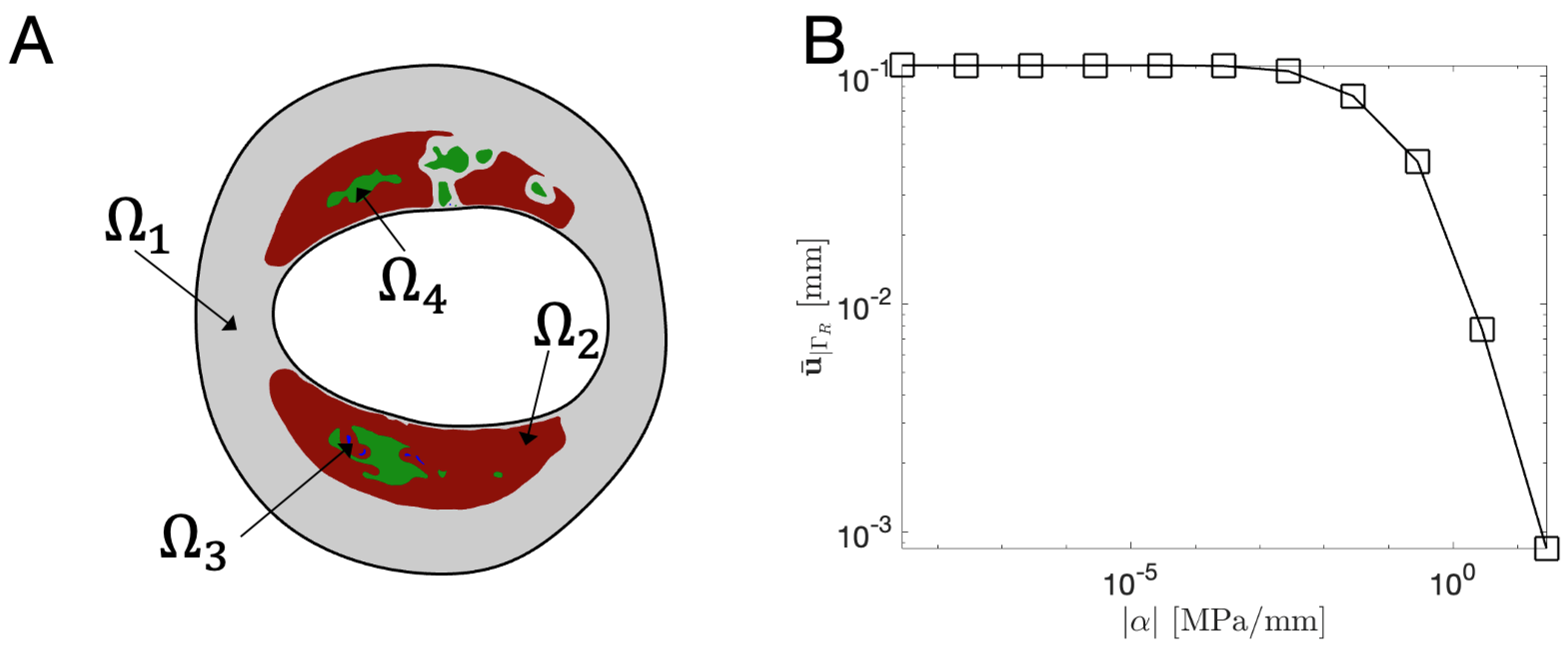
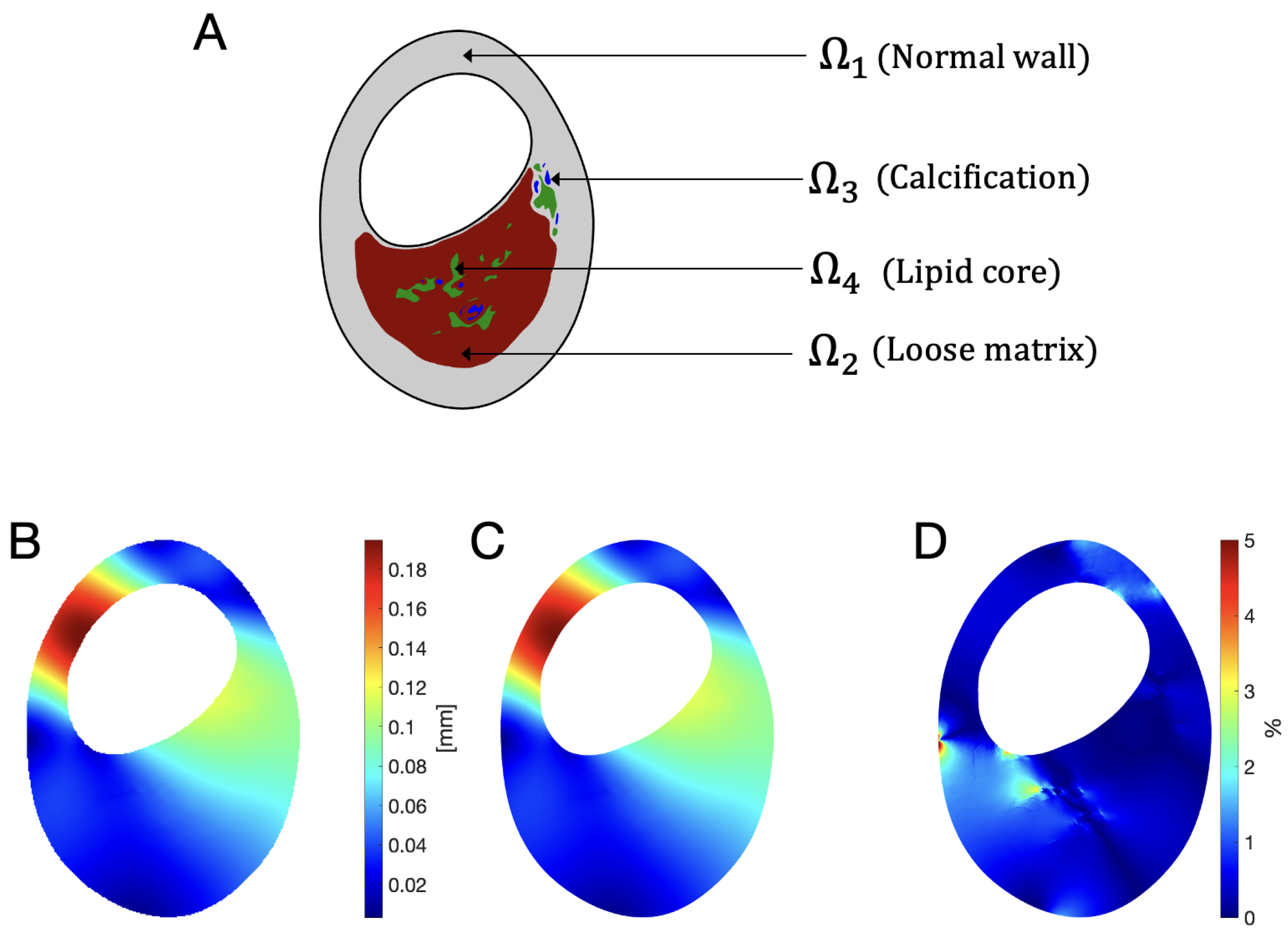
. The intrinsic heterogeneity of arterial cross-sections is described by dividing
into different subdomains
, corresponding to homogeneous regions having different material properties i.e., normal vessel wall, loose matrix, calcification, and lipid core (see
Figure 1). Without body forces, the equilibrium is governed by
with boundary conditions
where
is the Cauchy stress tensor and
is the displacement field;
is the surface traction,
is the elastic bed coefficient, and
is the outward unit normal to the boundary. Equation (3) represents the Robin boundary condition, physically corresponding to an elastic bed condition, simulating the surrounding tissue of the artery. The Neumann and elastic bed boundaries cover the whole boundary, i.e.,
.
The weak form of Problem
1 (physically corresponding to the principle of virtual work) reads: find
such that
for all
.
is the Sobolev space of order 1 on
; refer to [
40] for details. Note that the test function
is also seen as a virtual infinitesimal displacement (a perturbation from the equilibrium configuration of the body) consistent with the imposed boundary displacements, and
. The elastic bed BC (3) is an alternative to the standard practice of suppressing rigid-body motions by prescribing displacements at some arbitrarily selected points. As shown in the following, enforcing an isostatic scheme by prescribing point displacements and elastic bed BC produce similar results. We advocate the latter because the elastic bed BC includes physical information about the surrounding medium and does not require selecting arbitrary points to prescribe displacements. This is crucial for model order reduction, where one has to perform operations with the solutions of different configurations, and hence, they need to be comparable.
2.2. Level Set Description of the Domain and Subdomains
As introduced previously, the domain
is divided into
n subdomains
,
. The
n subdomains cover
, that is
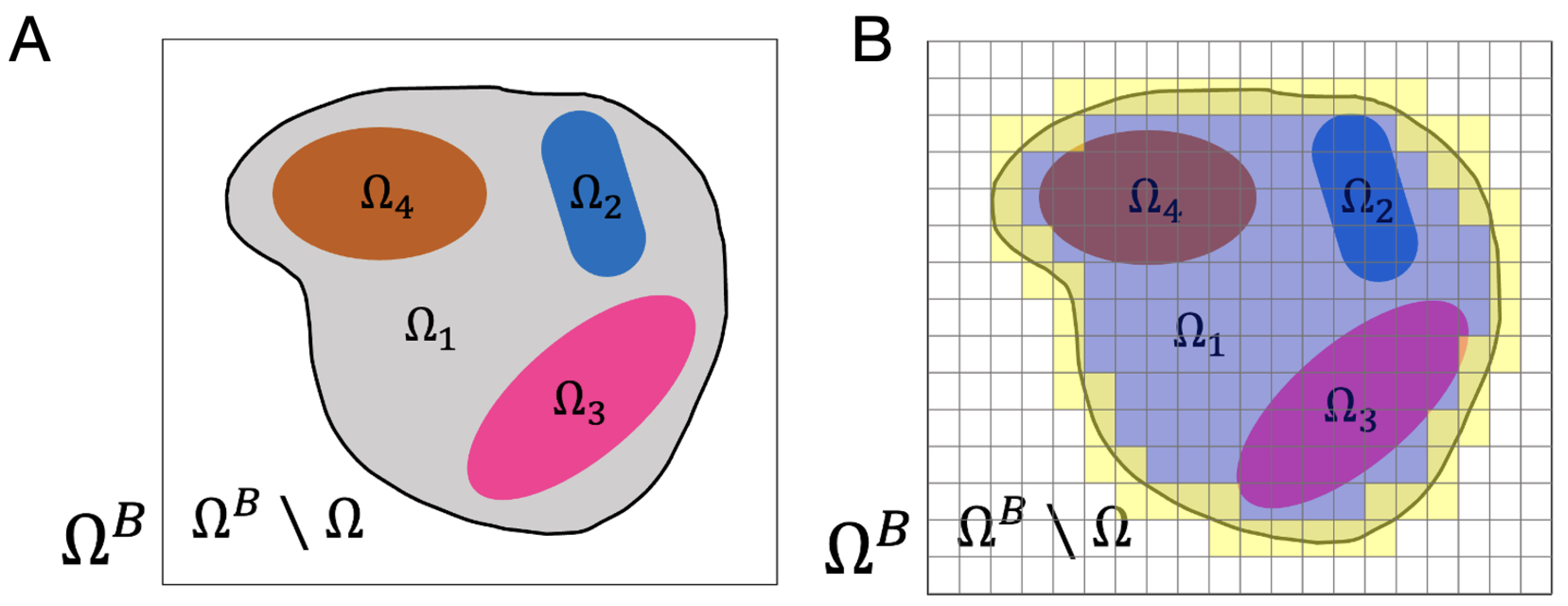
Level set functions implicitly describe the geometry of
and its subdomains in a unique framework. A background domain
, having a simple geometry (here rectangle or square shape), is introduced to accommodate all possible instances of
, resulting in
; see
Figure 2A.
A standard level set to describe
in
is a continuous function
taking values in
such that
for
and negative elsewhere. Thus,
for
. Typically,
is a signed distance to
[
41,
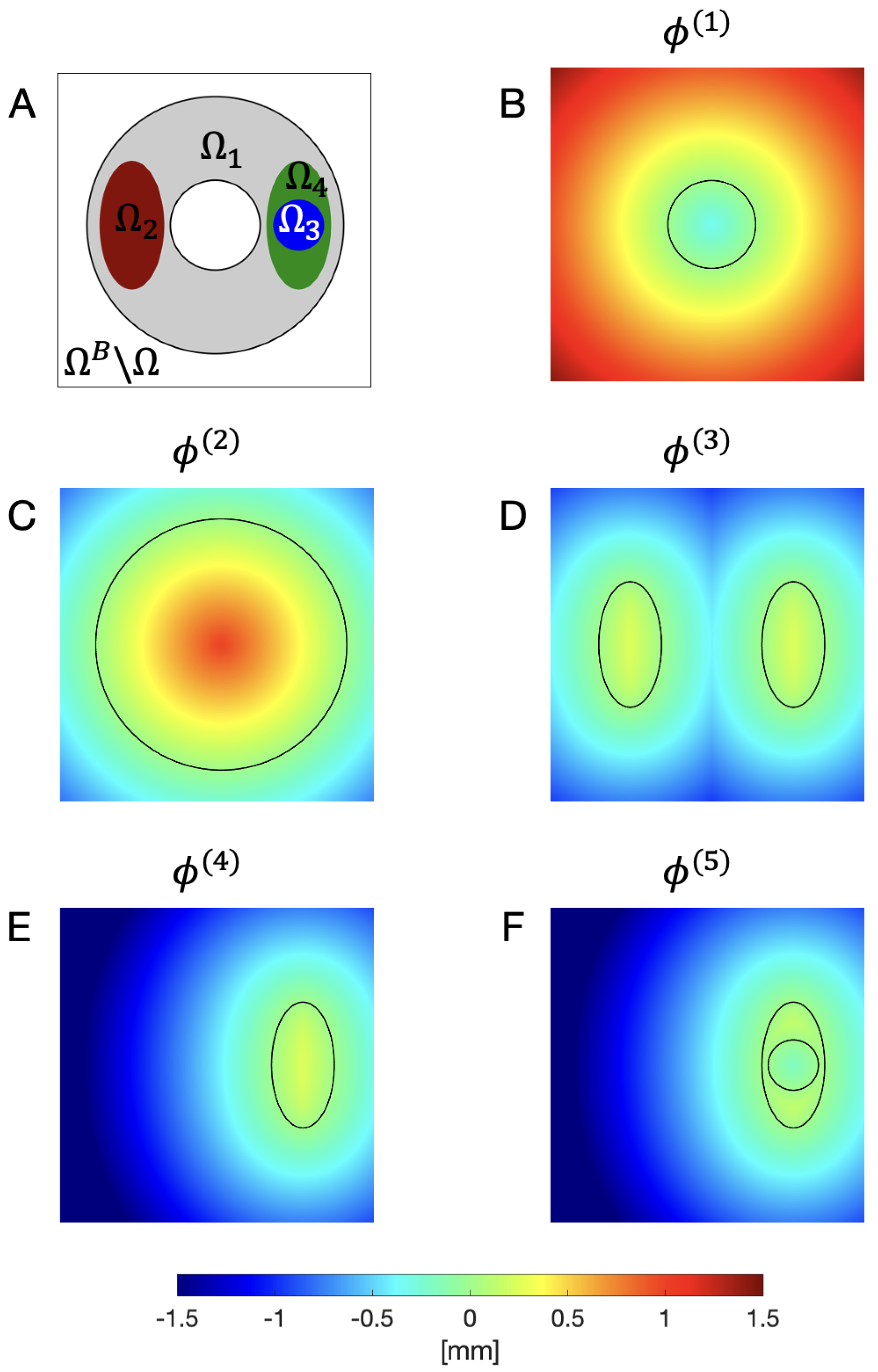
42]. For a configuration such as the one in
Figure 3, with two non-connected parts of the boundary,
and
, it is convenient to describe
using two level sets to distinguish between the two. Thus,
is identified with
and
such that:
on
, and
on
. Both level sets are positive in
; see
Figure 3B,C for an illustration. Note that one may recover a standard level set for
by just taking
. Then, following the ideas in [
43], new level set functions are introduced to describe the
n subdomains. Function
provides the information to identify
and distinguish it from the remainder subdomains. In particular,
for
and is negative elsewhere in
(that is in
). Similarly,
is positive in
and negative in the remainder, that is in
. The last hierarchical level set needed is
identifying
because then
is precisely the remainder (
). The values of
with
outside
are not relevant. This is consistent with the hierarchical character of this approach. A visualization of the hierarchical level sets is illustrated in the panels of
Figure 3 and summarized in
Table 1.
The approach described above is similar to the front-tracking method used to simulate multiphase flow with a fixed grid for the flow [
44], with the difference that the front does not change with time, and therefore, the level set is computed only once at the beginning of the analysis.
2.4. Unfitted Approach: Solving the Problem in the Background Mesh
The framework for approximating the level set over
just described is used to solve the original problem (
4) using an unfitted approach based on the ideas of the Immersed Boundary Method (IBM). Thus, the displacement field
is approximated in the background mesh using a standard FE approximation, namely
with
being the displacement vector in node
i. All vectors
,
, are collected in the standard vector of nodal displacements
. Using the Galerkin strategy to solve Equation (
4) results in a linear system of equations for
:
where matrices
and
in
are the discrete counterparts of the two bilinear forms in the left-hand side of Equation (
4) and
is the discretization of the linear form in the right-hand side.
Note that a node
i in the mesh is represented by the degrees of freedom
and
in
, and some other node
j is represented by
and
. Assuming these relations, some illustrative examples of the expressions for the corresponding entries in the matrices and the right-hand-side vector are given below
Note that all the integrals in the expressions above are defined in
,
, and
, and not in the background domain
where the FE functions
are supported. In particular, evaluating the local contributions (the integrals are restricted to some element
) requires identifying whether an element intersects
or
. Thus, the main implementation challenge of the unfitted approach is classifying the elements
of
inside
, those outside, and those crossed by the interfaces. For a given configuration, the geometrical information is encoded in the level sets, as described in
Section 2.2. This allows elaborating a list of the elements in
that are completely inside
, namely
such that if
, then
. Similarly, lists
and
are such that if
then
, and if
then
.
Figure 4 shows an example of such classification. The elements indexed in these three lists are
active, meaning that they play a role in the solution for the configuration described by the level sets. Thus,
is said to be active if
. Accordingly, all the nodes belonging to active elements are active nodes since the corresponding degrees of freedom are the unknowns of (
8) (the non-active nodes are to be eliminated from the system).
The computation of the elementary contributions to the stiffness matrix
is standard for the elements completely inside
for
(violet elements in
Figure 4A). The only particular feature to be accounted for is that the material properties of each Gauss point in the numerical quadrature belong to a subdomain
. With the values of the level sets interpolated at the Gauss point, following the classification described in
Table 1, the material properties are quickly recovered. Note that for the example shown in
Figure 4A, only two level sets,
and
, are required. In the elements crossed by the interfaces
and
, the integration has to exclude the part of the domain outside
. There, a more refined quadrature is used, and null material properties are assigned to the integration points outside
. A closed quadrature is preferred to avoid accounting for integration points inside elements with a small portion inside
. These geometric checks are performed by setting a tolerance and considering that the distance to the interface is zero when it is below this value. Computing elementary contributions to matrix
and vector
requires integrating within the portion of
or
in the element
. Thus, for
,
intersects
and contributes to
. Analogously, for
,
intersects
and contributes to
.
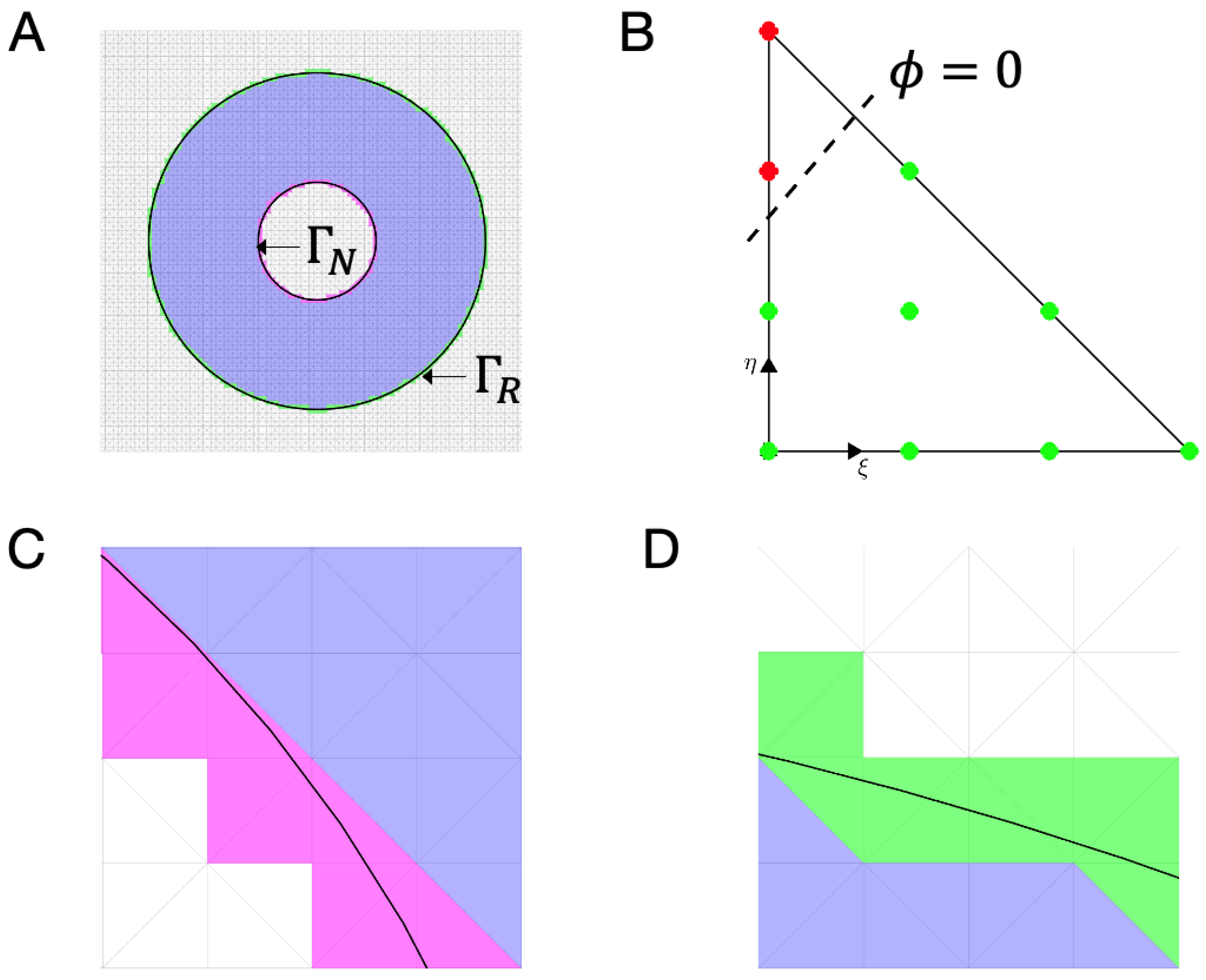
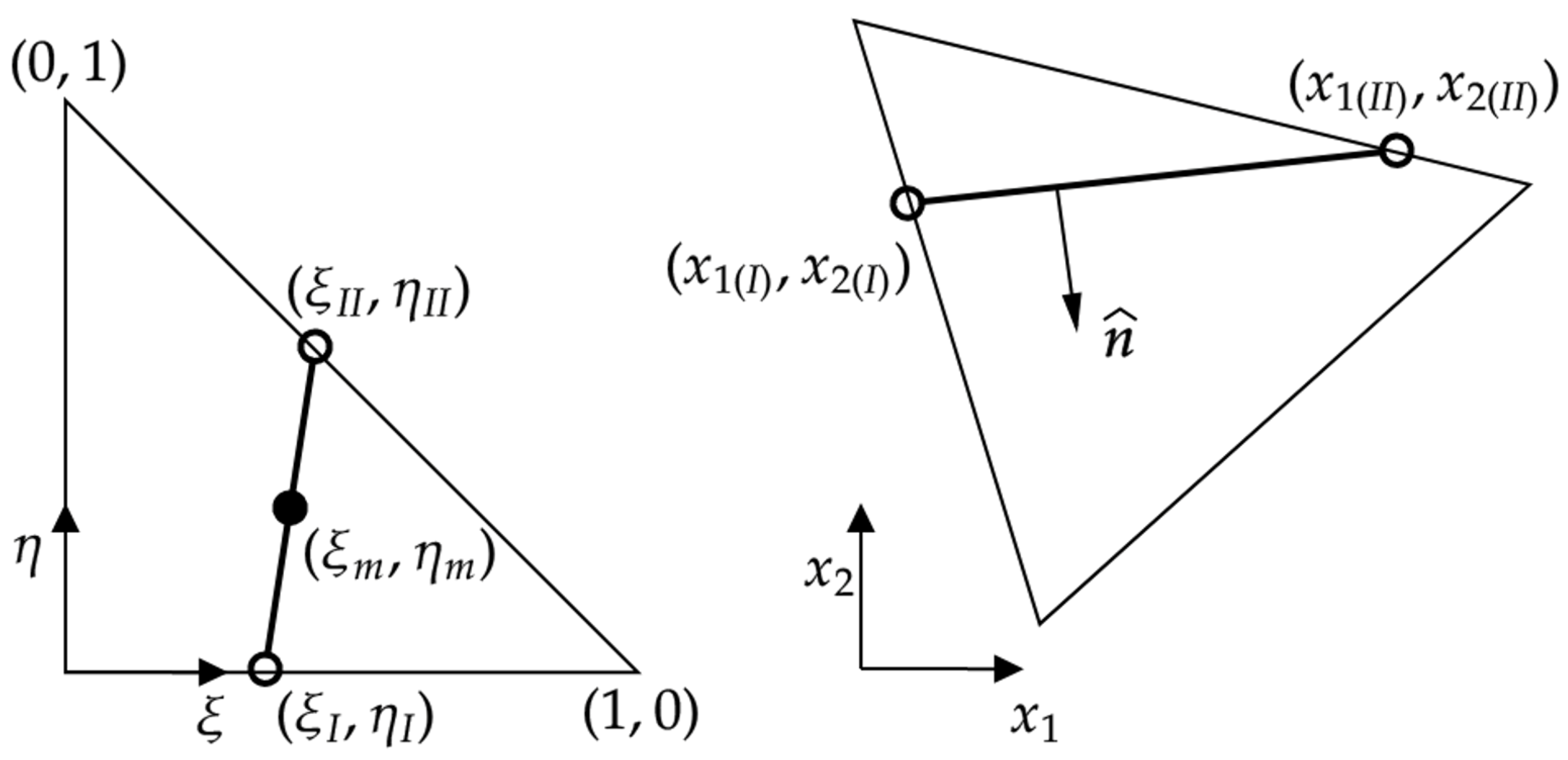
For
, the elementary contribution from element
to
requires computing
for all the nodes
i in element
. If the load corresponds to a pressure
p applied in the internal wall, then
, recalling that
is the outward unit normal. Thus,
and
. This integral, as it is standard in the FE practice, is computed in a reference element (for linear triangles, it is handy using the triangle with vertices
,
and
, see
Figure 5), where the shape functions are defined (and available in their analytical expressions) in terms of the reference coordinates
, namely
, for
. Mesh connectivity provides the link between the local numbering of the node inside the element,
(from 1 to 3 in the case of linear triangles), and the global numbering
i (from 1 to
). Since
is crossed by
, it is important to identify the entry and exit points in the element, that is the points
; see
Figure 5. This task is performed while identifying the elements in
, and it is straightforward after the nodal values of
. Recall that
for
. Same rationale works for
, using
. A quadrature is required to integrate along the segment
(a portion of
). Here, a Simpson quadrature is adopted and involves computing the values of the function to be integrated on the endpoints of the interval and in the midpoint,
; see
Figure 5. The general expression for Simpson quadrature to approximate the integral of some function
reads:
where
is the length of the interval
. Thus, computing the terms in (
9) requires obtaining the values of
in the three points
,
and
. These values are easily obtained after their coordinates in the reference element,
,
and
. Then, it suffices using the quadrature given in (
10) for
and
to obtain the horizontal and vertical components of the nodal forces (on node
i from element
e).
Similarly, for
, the elementary contribution from
to
requires computing terms of the form
This is achieved by taking
and using the quadrature (
10) accordingly. In the unfitted solution, the degrees of freedom corresponding to nodes that do not belong to any of the active elements (those with index
e in
) must be removed from system (
8).
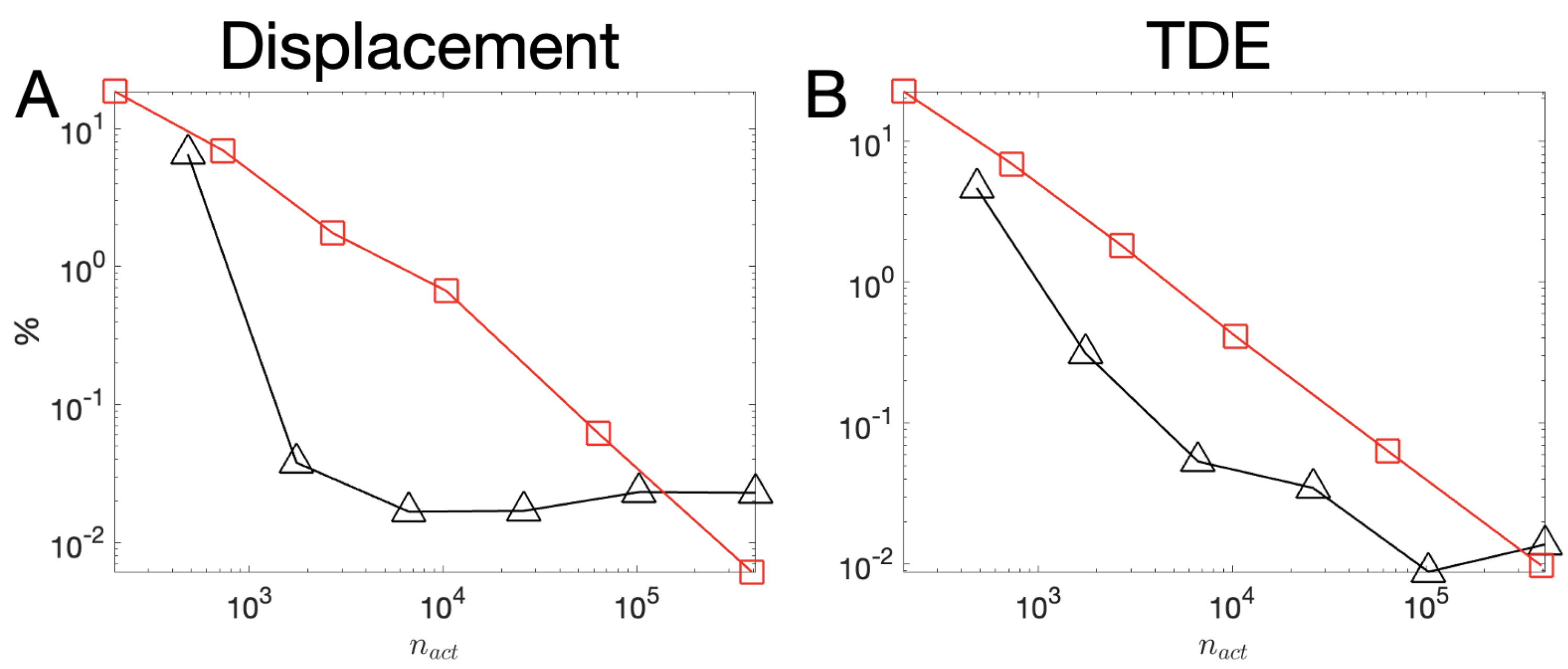
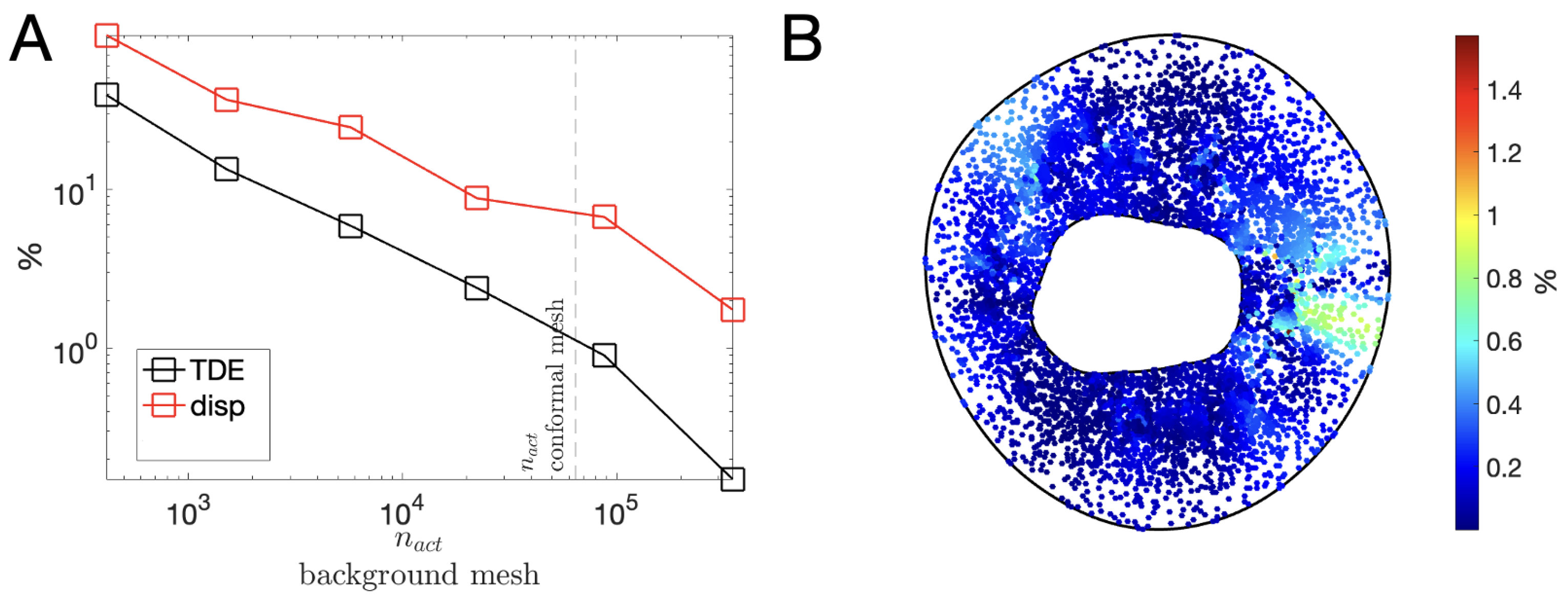
The number of active nodes (that is the number of nodes in the active elements) is denoted by and indicates the measure of the size of the system to be solved. Note that in conformal FE, is the number of nodes in the mesh. On the other hand, in an unfitted approach, .
The proposed methodology has been entirely implemented in Matlab R2022b, The MathWorks Inc, and executed in a 3.2 GHz Apple M1 with 8 GB RAM.
2.5. Validating the Methodolgy
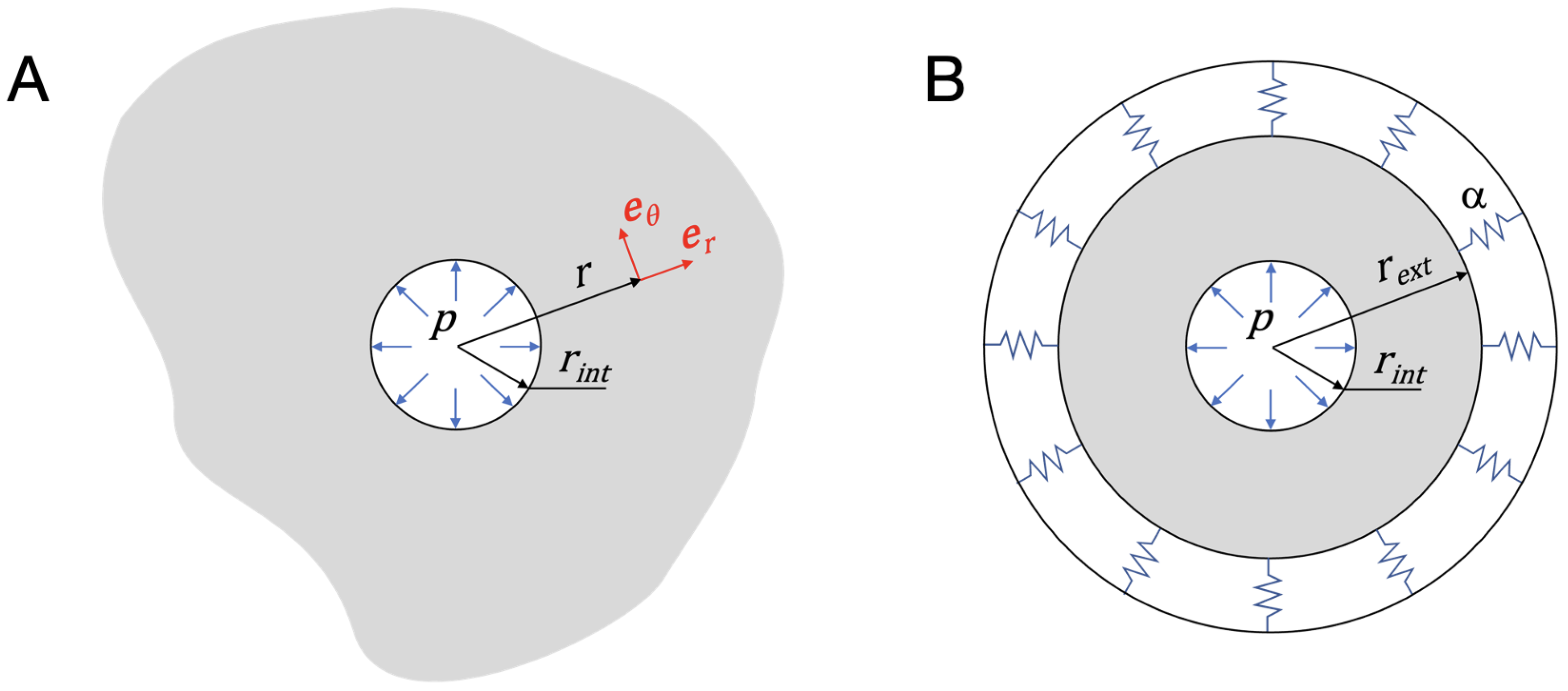
The solution of an infinite linear elastic solid with a cylindrical cavity of radius
subjected to internal pressure
p (
Figure 6A) is considered.
Assuming cylindrical coordinates, the analytical solution of the problem is [
46]
where
is the shear modulus of the material,
E and
are its Young’s modulus and Poisson ratio, respectively, and
is the radial coordinate. The strain and stress fields are obtained with the constitutive equations for a linear elastic solid as
This problem is equivalent to that of an infinite cylinder of internal radius
and external radius,
, subjected to internal pressure,
p (applied at
), and elastic bed BC on
(see
Figure 6B), with the
ballast coefficient
given as
obtained from (3) together with (
12), and (16)–(18).
With this problem at hand, the accuracy of the methodology is quantified in terms of local and global quantities. The displacement field is a local quantity of accuracy, and the total deformation energy (TDE) is used as a global metric to assess the convergence for the numerical solution. The TDE for the infinite cylinder in
Figure 6B is given by
Note that (
20) only accounts for the elastic energy stored in the cylinder and not in the elastic bed. Numerically, the TDE is calculated as
where
corresponds to the displacement vector of the active nodes in the background mesh, and
is the stiffness matrix associated with the active elements in the background mesh.


 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}