1. Introduction
The search and rescue problem has always existed along with the development of society, and it is also a long-term challenge. Traditional search and rescues are mainly implemented with the utilization of manned aircraft, helicopters, ships, etc. In recent years, with the increasing maturity of Unmanned Aerial Vehicles (UAVs) and photoelectric sensors, search and rescue operations based on UAV have proven feasible and have been successfully tested and applied [
1,
2,
3], showing advantages of large range, strong timeliness, low risk and low economic cost.
Area complete coverage search is a commonly used search and rescue method for UAVs [
4] and is suitable for maritime rescue [
5], disaster rescue [
6], and for use in mountainous areas [
7]. In addition, area coverage search can also be used for regional investigation [
8], patrol and surveillance [
9], infrastructure inspection [
10], precision agriculture [
11,
12] and other scenarios. Consequently, it has become an important research direction for UAV applications. The goal of area coverage is to cover the entire area of interest, while minimizing the time and distance spent on covering routes [
13].
In a UAV area coverage search, electro-optical (EO) equipment is typically used for detection. EO equipment has advantages of high resolution and long detection distances, but the disadvantage is that the fixed field of view is relatively small. Therefore, to improve search efficiency, operators control the EO device to perform sector scanning relative to the aircraft body. This usage greatly increases the coverage width of UAV during a single route, but also puts higher requirements on mission parameter planning, such as balancing the limitations of the UAV platform, EO device, environmental conditions, and operators to maximize the execution efficiency of the mission process. This has become a difficult and valuable issue for users.
At present, many studies on UAV area coverage have focused on route planning algorithms, mainly focusing on the effective planning of covered routes in complex areas. For areas with regular shapes, such as rectangles, no decomposition is required. Simple path planning is sufficient for complete coverage without overlapping. A typical example is the boustrophedon method, which is a route pattern that simply moves back and forth along the longest side of a polygon [
14,
15].
For areas with irregular shapes, most area coverage route planning algorithms decompose the target area into subunits. For example, Choset proposed an approximate cell decomposition method [
16], which decomposes the generated grid map into smaller sub-maps and then generates the navigation trajectory covering the entire area, according to the density of obstacles in each sub-map. Other similar decomposition methods include cell-based [
17], Morse-based [
18], wavefront-based [
19], and neural network-based [
20]. On the basis of decomposition, further path planning to cover the area can be performed. For example, ref. [
21] proposed a new method based on ant colony optimization (ACO) to determine the trajectory of a UAV that can strike a balance between the calculation requirements and the quality of the trajectory plan. A new coverage flight path planning algorithm, based on the ACO algorithm, was also designed in [
22], which can find collision-free, minimum-length flight paths for UAV in a three-dimensional (3D) urban environment with fixed obstacles. Other algorithms used for UAV coverage route planning include the constrained differential evolution [
23], grey wolf optimizer [
24], and hybrid algorithms [
25]. A real-time path-planning solution for an area-coverage mission using multiple cooperative UAVs was proposed in [
26]. The experimental results showed that the probability of achieving a 50% success rate with three UAVs is 2.35 times faster than that with one UAV. Given the limited capabilities of a single UAV, it is sometimes necessary for multiple UAVs to collaborate to complete a certain task, which can significantly improve coverage efficiency and provide better timeliness. Leader–follower [
27] is an effective route planning method for multi-UAV formation flight.
In the aforementioned studies, the coverage width of the search equipment is usually set as a constant, and route planning is carried out accordingly, without considering the influence of EO equipment resolution, scan mode, and other factors on coverage width and route planning.
A brief model of EO coverage width was established in some studies, wherein the influence of factors, such as flight height, on coverage width was initially considered, and a comprehensive study was conducted by combining a route planning algorithm. For example, in [
28,
29,
30], the geometric relationship between the static detection width of the UAV detector and flight height, pitch angle, and search azimuth angle was preliminarily studied. Avellar [
31] calculated the coverage width of the camera according to the width of the field of view of the image sensor, focal length of the camera lens, and distance H (flight height) between the camera and ground. Di Franco [
32] calculated the optimal motion trajectory and maximum height according to the distance of ground samples (image resolution) and proposed an energy-saving round-trip complete coverage algorithm to minimize the number of turns and, thus, improve task efficiency. However, these models of coverage width do not consider limitations and influencing factors, such as target recognition, velocity-to-height ratio, scan omission, and field-of-view distortion. Generally, they differ significantly from the actual situation, and cannot reflect the actual situation in practice.
Some scholars have promoted the application of computer vision in search tasks to reduce the workload of mission personnel and have even promoted the development of fully autonomous UAVs for search missions [
33,
34]. Experiments have begun on UAVs equipped with perception components based on deep neural networks (DNN). In [
35], DNN models that were pre-trained in different fields were proposed for UAVs, one for detecting human joints, and the other for measuring the similarities in appearance between two images in pedestrian tracking to solve the tracking problem. In [
36], the limitation of time for search and rescue missions was emphasized, and the embedded system, which is based on deep learning technology, can detect swimmers in open waters, thus enhancing the combat ability of emergency personnel. Combined with global navigation satellite system (GNSS) technology, it can be used for accurate human detection and rescue equipment release. In [
37], a camera-based UAV system for automatic target positioning was developed. By setting reasonable pigment thresholds, the automatic recognition of red and blue targets in aerial images was realized, providing useful insights for exploration in automatic target recognition. It should be pointed out that fully autonomous UAVs for search missions undoubtedly represent the trend of the future. However, although this progress improves identification efficiency, it also has higher requirements for no-omission coverage.
According to the literature searched, research on parameter planning of complete area coverage tasks in the EO sector scanning mode is still lacking.
Furthermore, task parameter planning for sector scanning involves many factors and needs to consider requirements and constraints from the perspective of many aspects, which is a typical multi-objective optimization problem. Many effective algorithms have been developed for different multi-objective optimization problems. Exhaustive search techniques can solve discrete optimization problems, but the computational cost is high when the variable space is large [
38]. Scenario-based robust optimization can ensure better optimization robustness under the premise of achieving optimization objectives, such performance being crucial for uncertain environments [
39]. Heuristic search algorithms have high efficiency but can only obtain suboptimal solutions [
40]. Some new bionic heuristic algorithms, such as Gray Wolf Optimization (GWO) [
41,
42] and Particle Swarm Optimization (PSO) [
43], have similar characteristics. The Genetic Algorithm (GA) [
44] is suitable for almost all optimization problems, but requires a large amount of computation and is generally used in offline situations. The Immune Algorithm (IA) [
45] retains the evolutionary mechanism of GA, and at the same time has a unique concentration inhibition mechanism, which better overcomes the problem of local optimization, but has the disadvantage of high computational cost. The Variable Neighborhood Search (VNS) [
46] and Multistage Neighborhood Search (MNS) [
47] algorithms overcome the local search limitation of Neighborhood Search (NS) and can search the solution space in multiple different neighborhoods, so they have good global search ability. The implementation of the algorithm is relatively simple. However, its convergence accuracy depends on the design of neighborhood operators and the setting of the algorithm parameters, which requires users to have a certain amount of professional experience. Therefore, it is necessary to develop an efficient and high-precision optimization algorithm for this problem. In the study here presented, the representative IA, GWO, and VNS algorithms were used to solve the task planning problem, and the convergence performance and computing efficiency of different optimization algorithms compared, providing a useful reference for solving the problem.
In general, there are several problems in the current research, as follow:
Most research on UAV coverage focuses on route planning algorithms, and the processing of EO equipment factors is too simple, or is even ignored, which does not reflect the actual situation.
There is a lack of research on area-coverage task planning in the sector scanning mode of UAV EO equipment. There is not only a lack of descriptive model research for the problem but also a lack of task planning research combining the problem model and optimization algorithm.
In view of this, the objectives of this paper follow:
A no-omission coverage width model was established for the sector scanning of UAV EO equipment that considers the influence of target recognition.
Description models of the constraints were established that, combined with the sector scanning method, consider the influence of various constraints on parameter planning of the area coverage task. Such as target recognition, speed-to-height ratio, and missed scanning, etc.
A parameter planning algorithm to address the area coverage task in the sector scanning mode was designed to ensure an efficient search, based on the representative IA, GWO, and VNS algorithms, and combined with constraints.
The three designed task planning algorithms were simulated and verified, and the main performances of these algorithms in solving the problems in this study were compared.
5. Simulation and Discussion
In this section we describe the simulation performed to comprehensively evaluate the effectiveness of the models and algorithm.
First, we set the parameter threshold and value range. The maximum recognition distance ; maximum recognition distance ; minimum pitch angle ; maximum scanning angular velocity ; minimum flight altitude ; and maximum flying altitude can be obtained by Equation (37) as ; minimum speed ; maximum speed ; and speed-to-height ratio threshold . Best cruise speed and best cruise altitude .
5.1. Search Range and Full Coverage Width Simulation
First, six sets of task parameters were set based on experience, and simulations were performed based on the coverage area model established above. The results are shown in
Figure 6 and
Table 1.
The static view field, based on the first set of parameters, is shown as
in
Figure 6a. It moves around the position of the aircraft and uses the flight direction as the symmetrical axis to create a uniform sector-scanning motion. If the task parameters do not change, then the area remains the same during the search process. Trajectory
is the motion trajectory of the point
in half a period, and the other trajectories are the same.
The maximum coverage width that could be obtained, based on the third set of parameters, was 14,979.7 m. The simulation results are shown in
Figure 6c, but the search efficiency was not high. Although the coverage width of the fourth set of parameters was not the maximum, the maximum coverage efficiency obtained was 1175, 405 m
2/s, as shown in
Figure 6d. From
Figure 6a,f, it can be seen that the first and sixth sets of parameters did not meet the limit conditions of complete coverage, and there was a missing area between the two round-trip scans. Therefore, relying on experience to set task parameters is not satisfactory, as there may be missing areas, and it is also difficult to obtain high coverage efficiency.
5.2. Analysis of the Changes of J
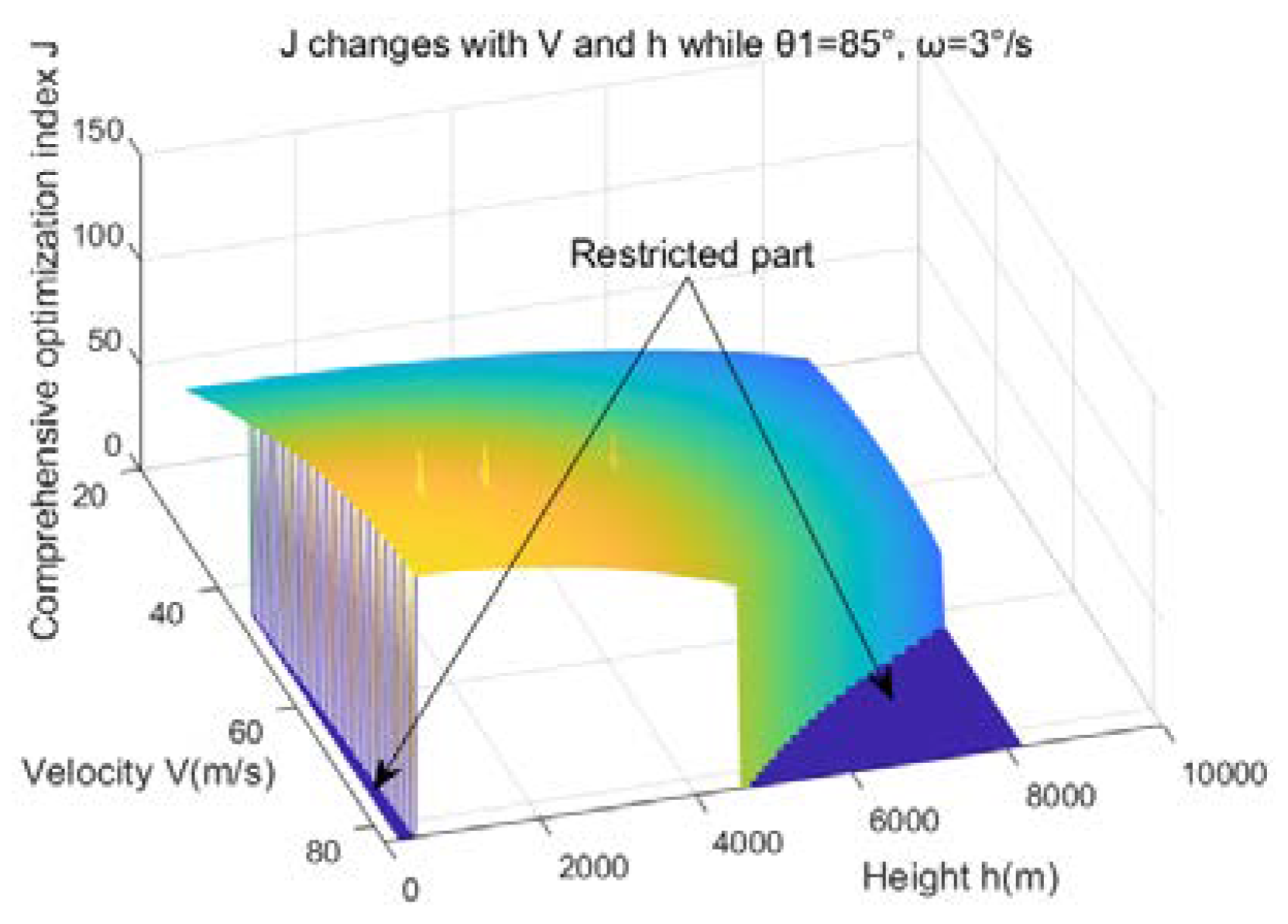
In the actual task process, not only is high search efficiency required, but many other factors must also be considered. The task planning simulation was performed according to the comprehensive optimization index J established by Equation (45). Set , , .
Next, when the other parameters were fixed, we observed the changes in the comprehensive optimization index J with two different parameters.
As shown in
Figure 7, with search azimuth
θ1 = 85° and scanning search angular velocity
ω = 3°/s,
J changed with
V and
h. It can be observed that the corresponding relationship was a curved surface. When
V was large and
h was high, there was a large restricted area and the parameters in this area did not meet the condition of complete coverage. When
V was large and
h was low, there was a small restricted area.
As shown in
Figure 8, when
V = 80 m/s and
h = 3500 m,
J changed with
θ1 and
ω. It can be seen that the corresponding relationship was also a curved surface. When
ω was small and
θ1 was large, there was a larger restricted area, and the parameters in this area did not satisfy the conditions of a complete coverage search.
When
V and
ω were unchanged,
J changed with
h and
θ1, shown in
Figure 9. When
h and
ω remained unchanged, the changes in
J with
V and
θ1 are shown in
Figure 10. In both cases, it can be seen that there were restricted areas and non-linear mutations.
From
Figure 7,
Figure 8,
Figure 9 and
Figure 10, it can be observed that there was no specific proportional relationship between
J and a certain group of task parameters. Owing to many constraints, there was a non-linear mutation relationship, so it was difficult to solve such problems based on traditional analytical methods. Task parameter optimization was performed, based on IA, GWO, and VNS.
5.3. Task Planning Simulation Based on IA, GWO and VNS
The IA evolutionary algebra Era = 100 was set, and 10 rounds of task parameter planning were conducted. The results are presented in
Table 2.
The maximum iterations of GWO were set as
, and the running time of the GWO algorithm was similar to the 100 generations evolution time of the IA. Similarly, we set the maximum number of iterations of the VNS to
. Tenrounds of task parameter planning were conducted, based on the GWO and VNS algorithms. The results are presented in
Table 3 and
Table 4, respectively.
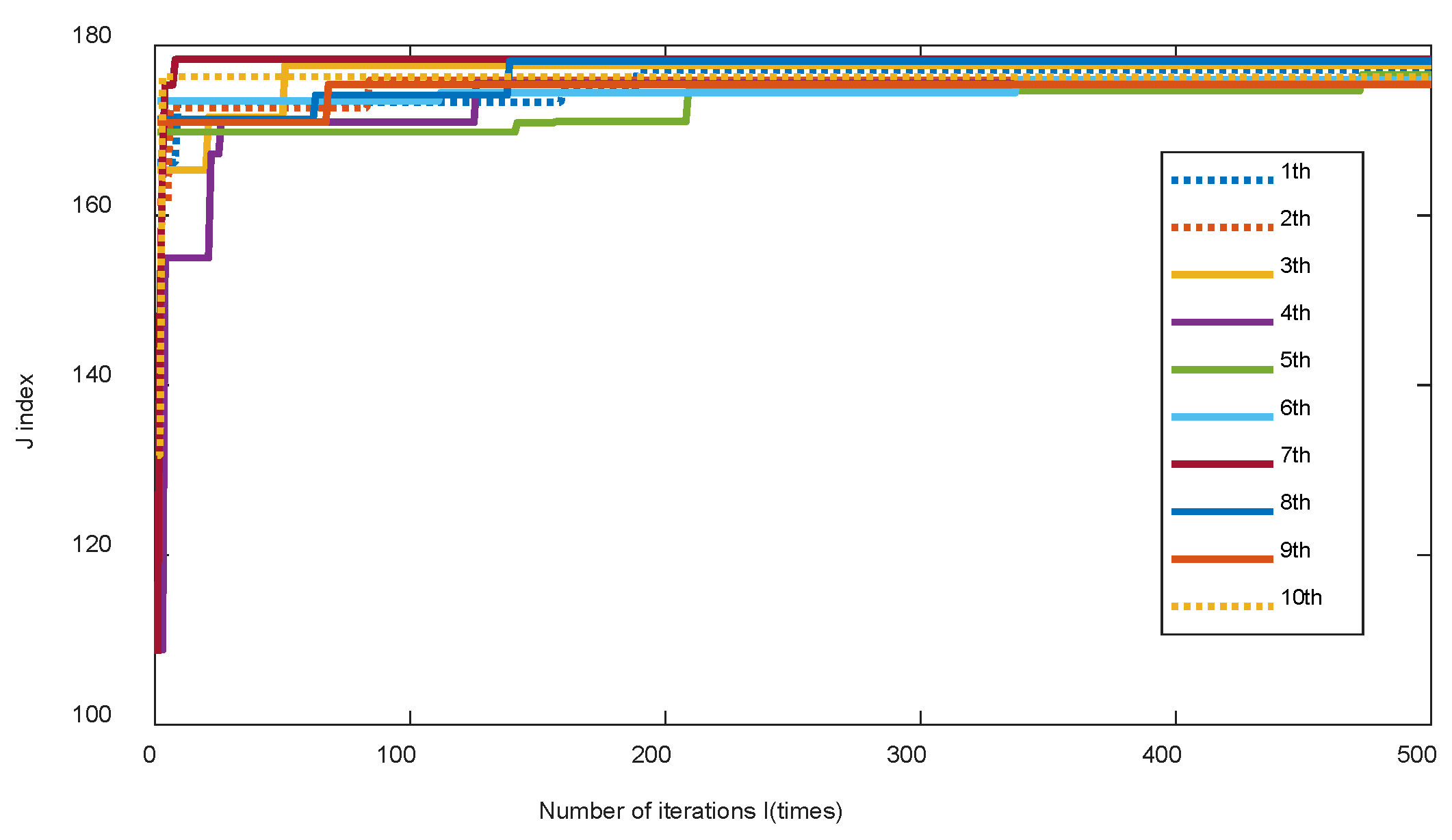
The change curves of fitness of 10 rounds of IA optimization are shown in
Figure 11, the change curves of fitness of 10 rounds of GWO optimization are shown in
Figure 12 and the curves of VNS are shown in
Figure 13.
It can be seen from the simulation results that IA, GWO, and VNS obtained excellent task parameter sets, had high search efficiencies and comprehensive indices, and met the no-interval missing scan and speed-to-height ratio constraints. However, there were some differences in the results. Next, the differences in the parameter planning results of the three algorithms were compared and analyzed.
As shown in
Figure 14, the optimal
J index, average
J index, and average time cost of the three algorithms were compared.
As shown in
Figure 14, the planning results obtained by the three algorithms exhibited little difference in index
J. However, in comparison, the results obtained based on IA were slightly better than those of the other two algorithms in terms of
J. The optimal
J index in the 10 rounds based on IA was 183.84, and the optimal
J index in regard to GWO and VNS were 182.07 and 178.37, respectively. From the average
, the average
based on IA was 179.19, the average
based on GWO was 179.11, which was almost the same as that for IA, and the average
based on VNS was 176.72, which was significantly worse than those for IA and GWO. This showed that IA had a higher convergence accuracy when solving such problems, GWO was second, and VNS convergence accuracy was the lowest.
The
J index change curves are shown in order to compare the convergence speeds of the three algorithms, and are given in
Figure 15. At the same time, to make the image easy to observe and not too crowded, only the
J index change curve of the optimal round of each algorithm was selected. The selected results were as follows: 1th round of IA, 1th round of GWO and 7th round of VNS. In addition, because IA had 100 evolution times, GWO 400 cycles, and VNS 500 cycles, the quantities of data are different, so the curves of IA and GWO are “stretched” to facilitate comparison.
As can be seen from
Figure 16, in IA, the fitness of the optimal solution increased steadily, the change curve was relatively gentle, and there was “step” improvement during the operation, which indicated that the IA jumped out of the local optimal and converged in a position of relatively high precision. At the early stage of GWO, the fitness of the optimal solution (
-wolf) increased rapidly, surpassing that of IA. In the subsequent process, the phenomenon of “step” improvement was constantly produced, which indicated that the GWO constantly jumped out of the local solution and converged to a relatively optimal position (slightly worse than IA). At the early stage of VNS, the fitness of the optimal solution increased the fastest, surpassing that of the IA and GWO algorithms. However, the optimization process then stagnated. This showed that VNS had the best optimization efficiency in the early stage, but the global optimization ability was relatively weak, and it was suitable for questions with high real-time requirements.
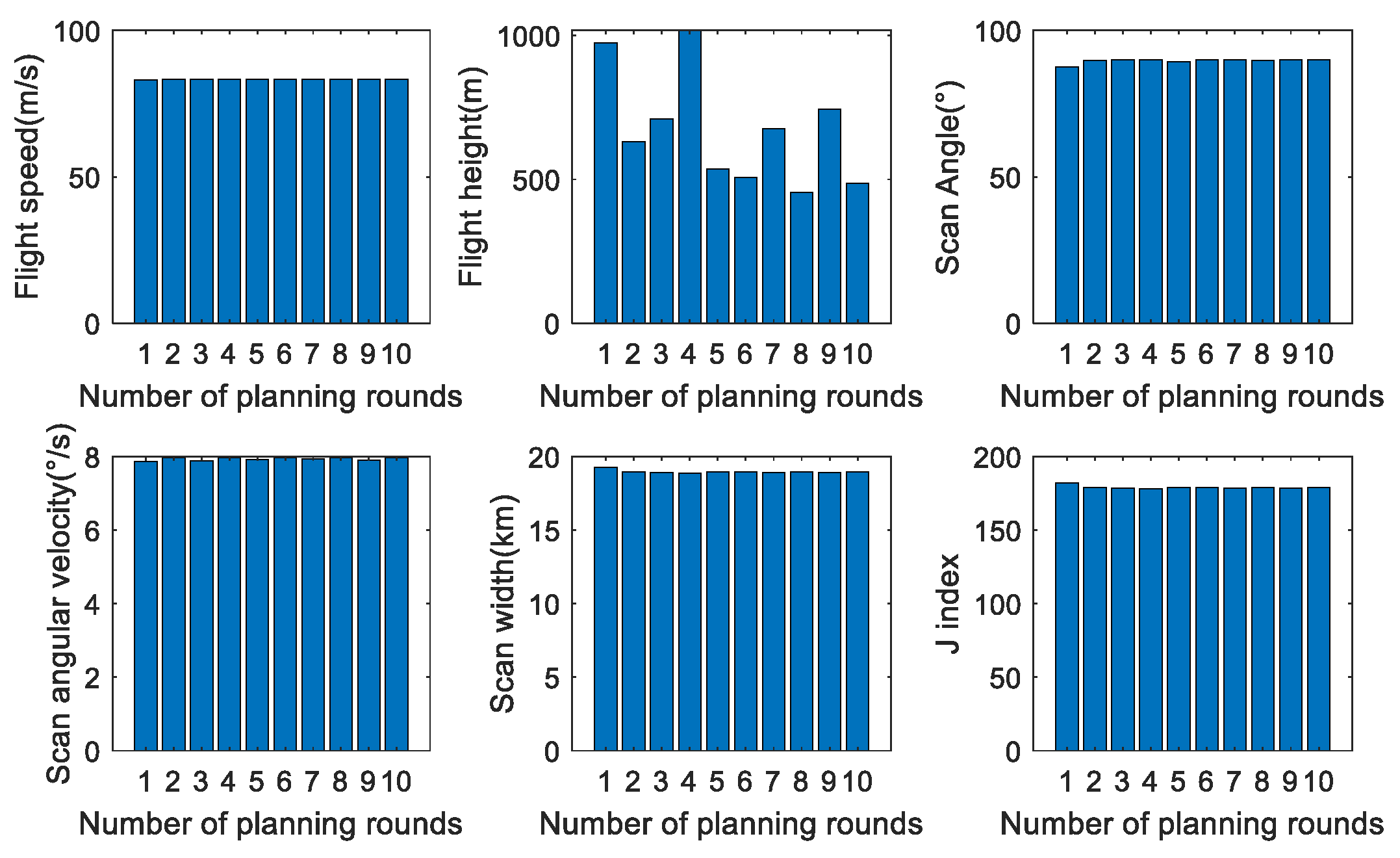
The optimization results were further analyzed. To facilitate the observation, the ten groups of planning results obtained by the three algorithms are presented in the form of bar charts in
Figure 15,
Figure 17 and
Figure 18. It can be seen from the bar chart comparisons that the results obtained by the three algorithms tended to be consistent in each round for speed
and sector scanning Angle
. In terms of flight height
, the results based on VNS were the most different, followed by GWO and IA. However, even the planning results of IA showed the largest difference in flight altitude
compared to other mission parameters, such as flight speed
. With respect to sector scanning angular velocity
, the difference in planning results based on GWO was the smallest, and the difference between IA and VNS was relatively large. Overall, IA had the most stable planning results, followed by GWO and VNS.
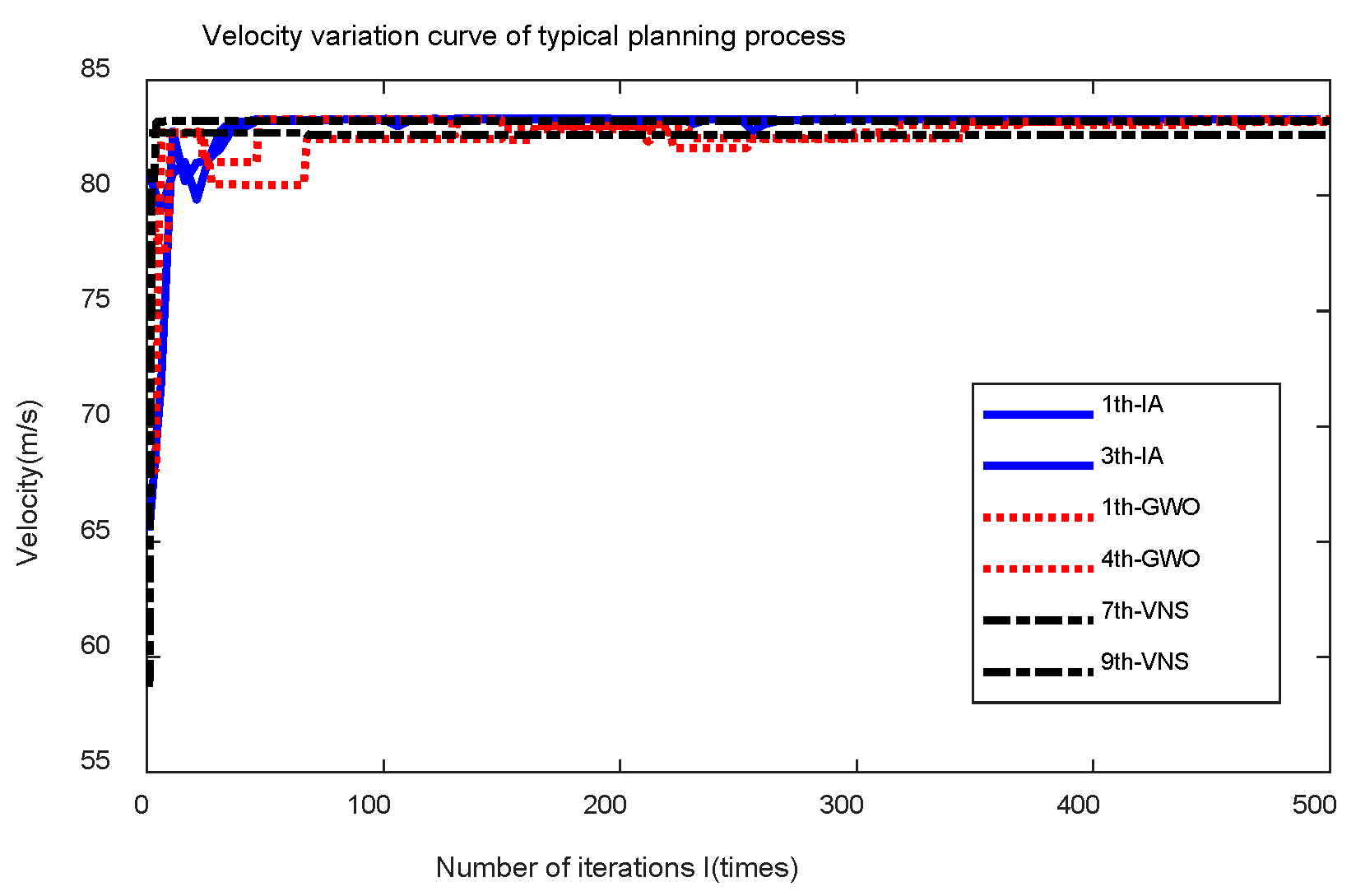
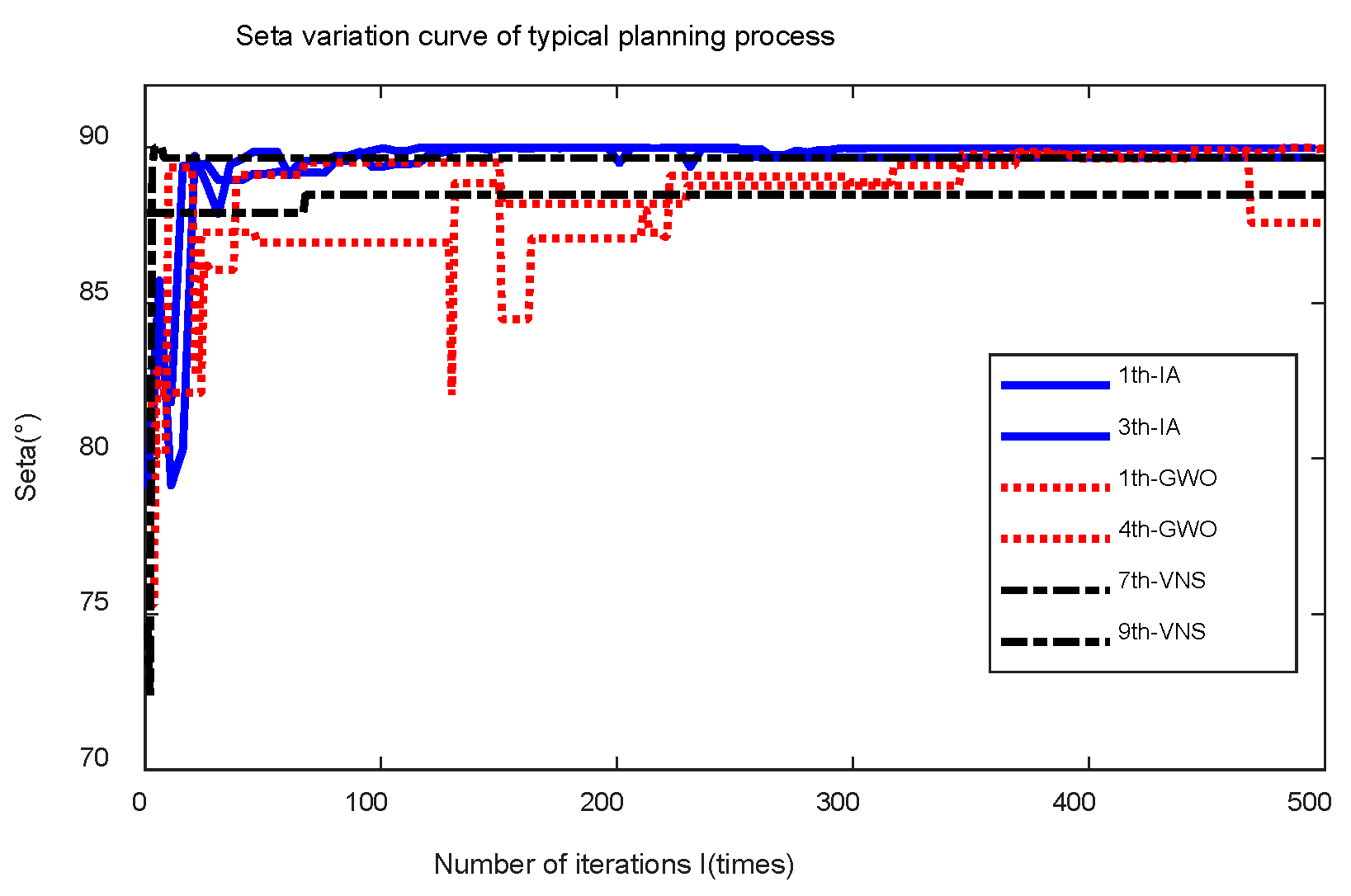
Furthermore, the changing process of the task parameters under a typical optimization process was compared. Similarly, to make the image less crowded, only the change curves of typical processes were selected for observation and comparison. The selection principle was that the J index was the best or the J index was the closest to the average. The selection results of IA were as follows: the 1th round and the 3th round; GWO selection results were: the 1th round and the 4th round; VNS selection results were: the 7th round and the 9th round.
The speed change curves of the typical rounds are shown in
Figure 19. It can be seen that among the three optimization algorithms, the overall trend of speed was increasing, which reflected the positive significance of increasing speed for improving
J index. The optimization efficiency of VNS was the highest, followed by GWO, with IA the slowest. Both GWO and IA exhibited oscillations in the early stage of operation, which reflected the complexity of the problem.
The change curves of
h,
, and
are shown in
Figure 20,
Figure 21 and
Figure 22. It can be seen that the change trend of height
h in all three algorithms was downward overall, and the change trends of
and
were both increasing.
However, the optimization processes of the different algorithms exhibited significant differences. Basically, the optimization processes of VNS were the fastest, and sub-optimal solutions soon found, as shown in “7th-VNS” and “9th-VNS” in
Figure 19,
Figure 20,
Figure 21 and
Figure 22, while the subsequent processes were basically stable and unchanged. The GWO optimization process was also fast; however, the subsequent optimization processes entered a state of oscillation, as shown in “1th-GWO” and “4th-GWO” in
Figure 19,
Figure 20,
Figure 21 and
Figure 22. In the IA process, the variation curves of the parameters were relatively stable and gentle. This difference reflected the algorithmic characteristics of the three methods.
The change curves of coverage width
d1 are shown in
Figure 23. As
d1 was the main component of
J and its weight was much greater than that of the other indices, the trend of
d1 was basically consistent with
J.
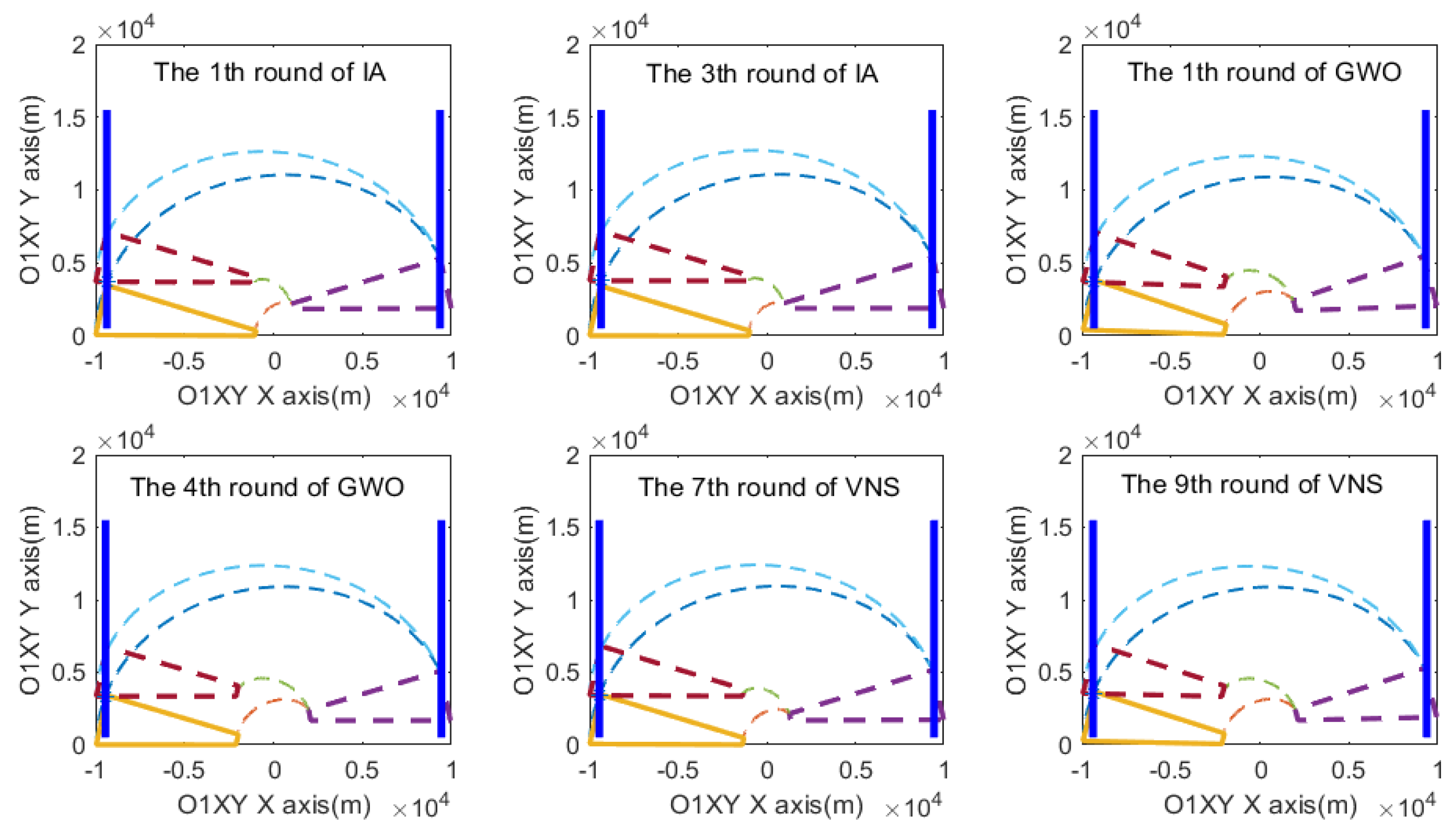
5.4. Comparison of Area Coverage under Different Parameter Sets
The scanning trajectory based on typical optimization results are shown in
Figure 24. It can be seen that the optimized coverage widths were generally large and met all the constraints.
To demonstrate the advantages of the optimized task parameters, a coverage search was implemented based on different parameter sets. It was supposed that there was an area of 160 km × 80 km that had to be covered.
Test (a): Test (a) referred to the optimized task parameters using IA, and the 1th round planning results selected as an exampl.
Test (b): Test (b) referred to the optimized task parameters using GWO, and the 1th round planning results selected as an example.
Test (c): Test (c) referred to the optimized task parameters using VNS, and the 7th round planning results selected as an example.
Test (d): Test (d) referred to the parameters selected by experience, and the 4th group of parameters in
Table 1 was selected as an example.
Test (e): The other task parameters were the same as in test (d), but the coverage width was determined according to the traditional method , and the interval missing was not considered.
A common boustrophedon coverage method was adopted for the search track. The turning process, wherein the UAV completed a line scan and turned around, is shown in
Figure 25. Assuming that the turning overload of the aircraft was 30 m/s
2, the starting position of each scanning line (e.g., p
turn) was 5 km from the edge of the area to be searched.
The coverage results of the area are shown in
Figure 26a–e. Defining the miss ratio
=
/
,
as the area missed in the coverage search, and
as the total area. The time consumption and
of the five tests were calculated, and the results are presented in
Table 5.
Compared with Test (e), the simulation results of Tests (a)–(c) showed that the coverage width model could achieve complete coverage of the target area without missing data. However, if the task parameters were simply determined by the traditional method, without considering miss scanning, the miss ratio could be as high as 13.96% (Test (e)) indicated that the model and algorithm in this study are effective and necessary.
By comparing the results of Tests (a) and (d), it can be seen that both sets ensured no missed coverage. However, the empirical parameters cost 19,328 s to complete coverage, while the planned parameters had a shorter time consumption of 10,742 s, which was only 55.58% of the time cost of Test (d). Tests (b) and (c) were similar to test (a) and they were also significantly better than test (d). Therefore, the planned parameters had better coverage efficiency, and the algorithm designed in this study is effective and feasible.
By comparing the results of tests (a), (b), and (c), it was observed that the task parameters planned, based on IA, GWO, and VNS, could achieve an efficient search process without missing areas. When covering the area set in this study, there were no significant differences among the three sets of planning parameters. For example, the task completion times were 10,742 s (IA), 10,858 s (GWO), and 10,761 s (VNS). The planning result of IA was only slightly superior in terms of completion speed, 116 s faster than GWO and 19 s faster than VNS. This may not result in a significant difference in an actual mission. Therefore, all three algorithms are feasible. For offline task planning, IA and GWO could be the appropriate choices for time-efficient online task planning, while VNS and GWO could be the appropriate choices for online and real-time task parameter planning.
6. Conclusions
Automated target search and rescue must ensure complete coverage of an area. In this study, we conducted an in-depth study on task parameter planning when UAVs use EO equipment to cover areas in the sector scanning mode.
A model for the complete coverage width under sector scanning mode was established, and a model with no interval missing constraint and speed-to-height ratio constraint was also established. The test results indicated that the models were effective and reliable.
Although task planning is a serious nonlinear problem, the algorithm designed, based on IA, GWO, and VNS, can effectively solve task planning problems. The coverage process, based on optimized parameters, meets all constraints, has a higher search efficiency, and does not miss areas. Although all three optimization methods are feasible, they exhibit some differences. In general, IA is more suitable for offline occasions, VNS is more suitable for online real-time planning, and GWO has characteristics between the two.
The coverage task planning algorithm in this study can not only realize no-omission coverage but also consider the problem of target recognition, which provides technical support for fully automated target search and rescue.





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}