
Three-Dimensional Drone Exploration with Saliency Prediction in Real Unknown Environments


Abstract
:1. Introduction
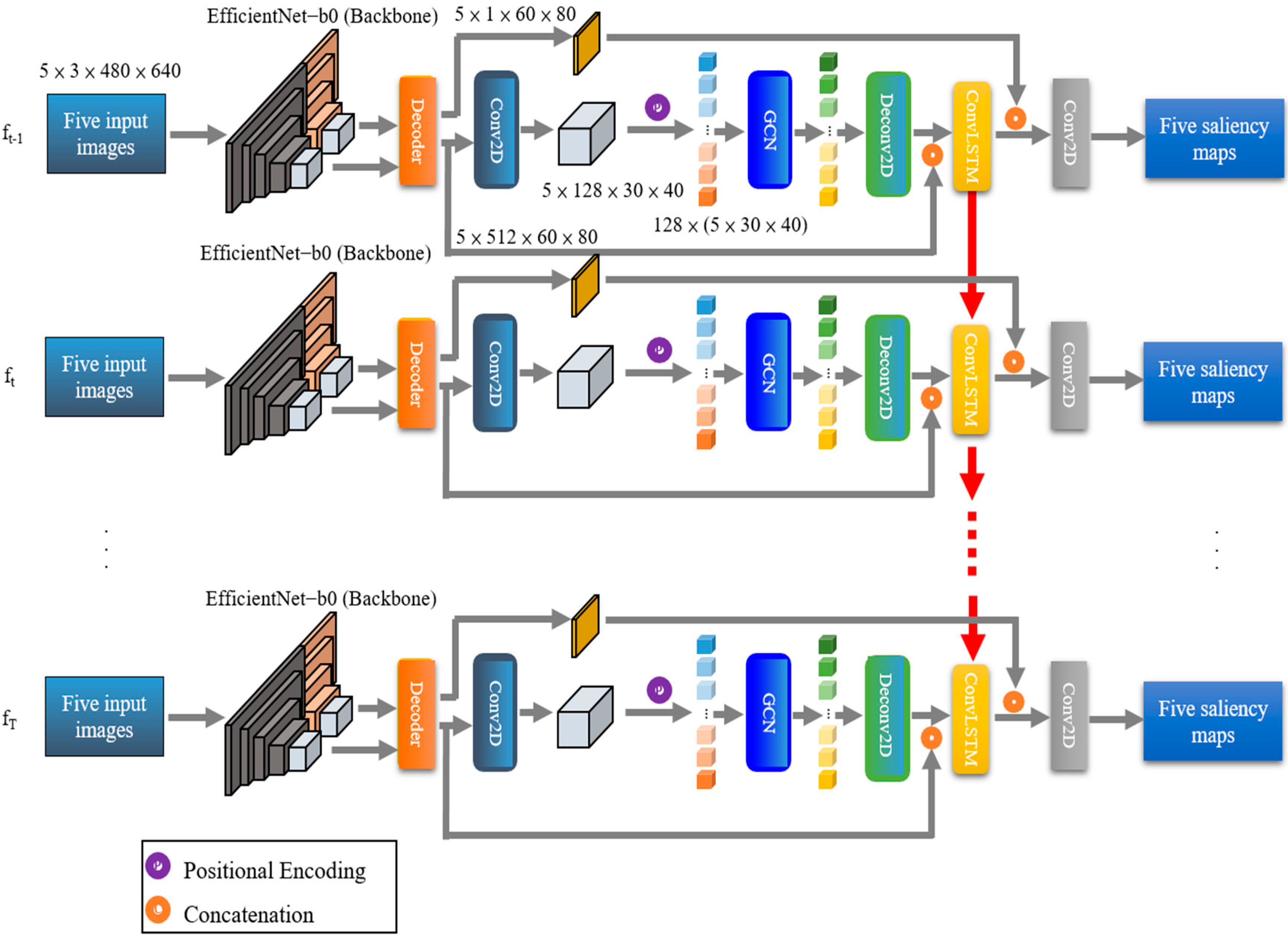
- We propose Lite-TA-MSNet, which is a faster, lighter, and more suitable model for real-time computation on drones than the present state-of-the-art TA-MSNet method.
- We propose a novel drone exploration approach based on VIO to solve various practical problems encountered during exploration.
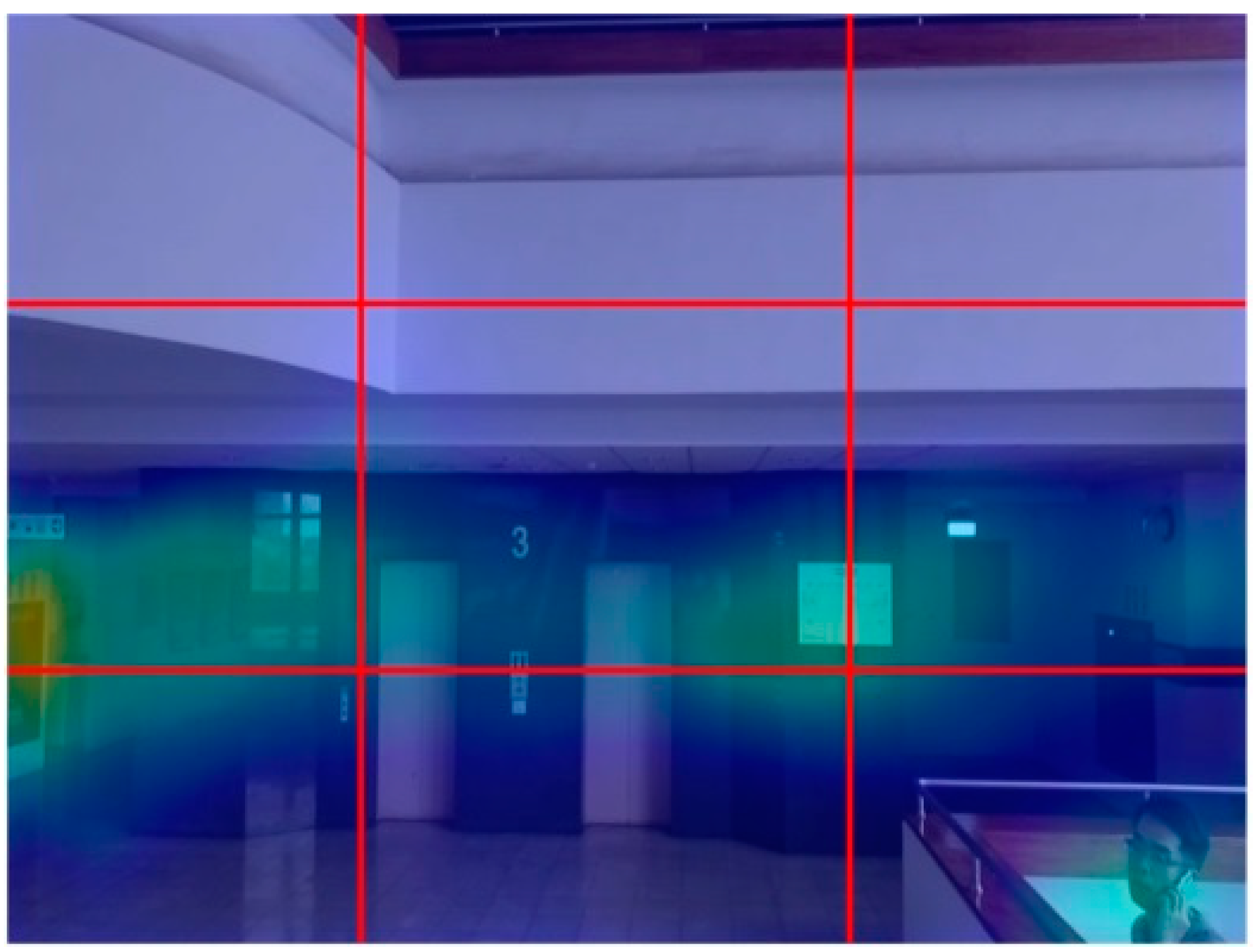
- We propose a novel division strategy that involves dividing saliency maps into nine squares to enable drones to perform the three-dimensional (3D) detection of salient objects.
- We integrate the proposed models and approaches into a 3D ADES.
2. Related Work
3. Architecture of the Proposed ADES
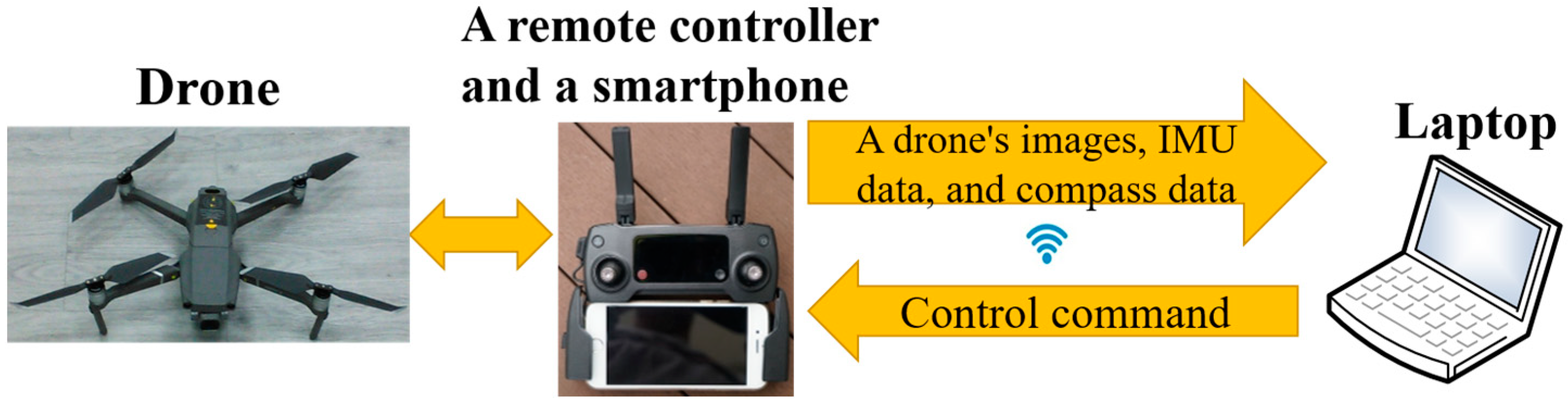
3.1. Hardware Architecture
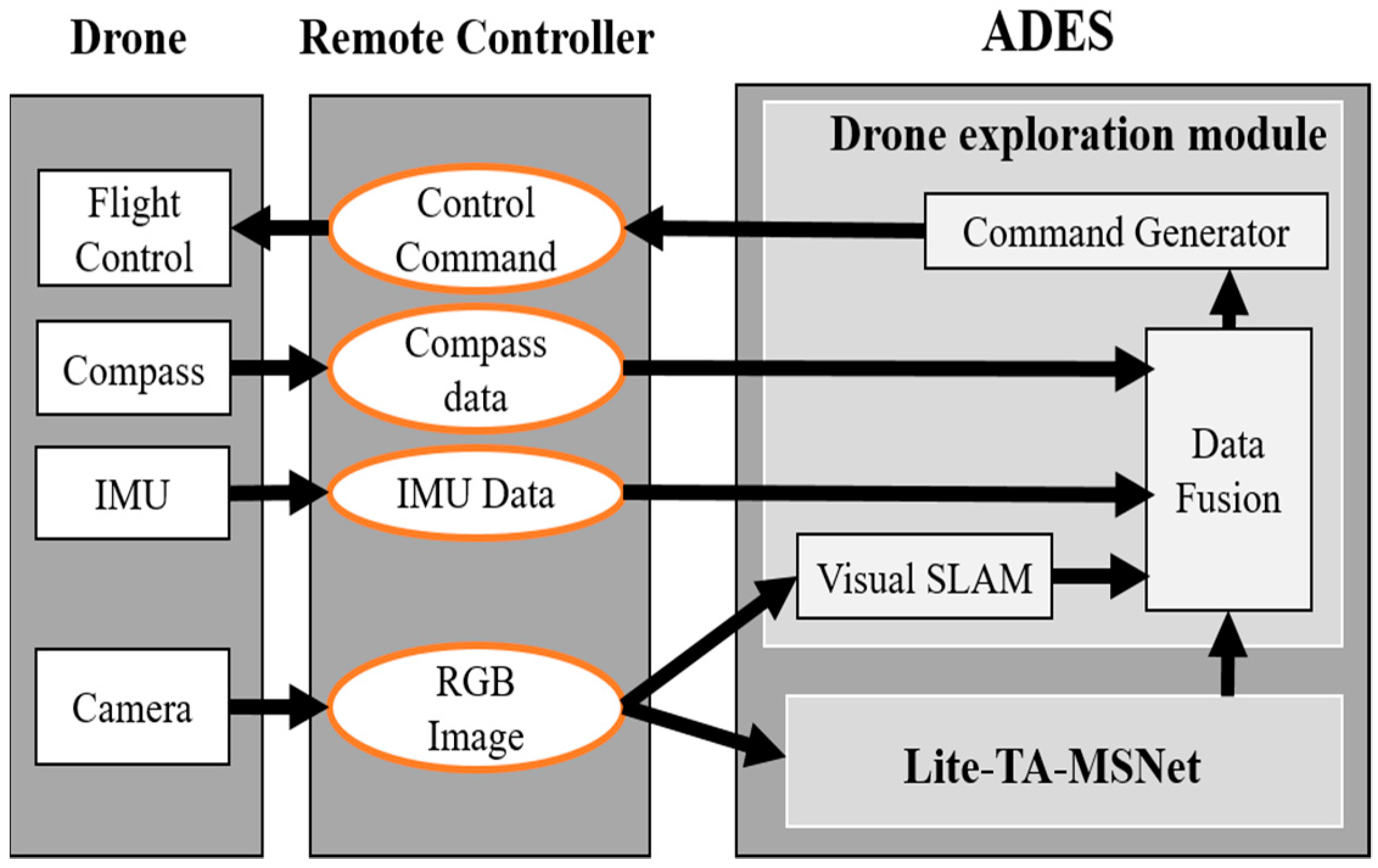
3.2. Software Architecture
4. Proposed Methods of ADES for Drone Exploration
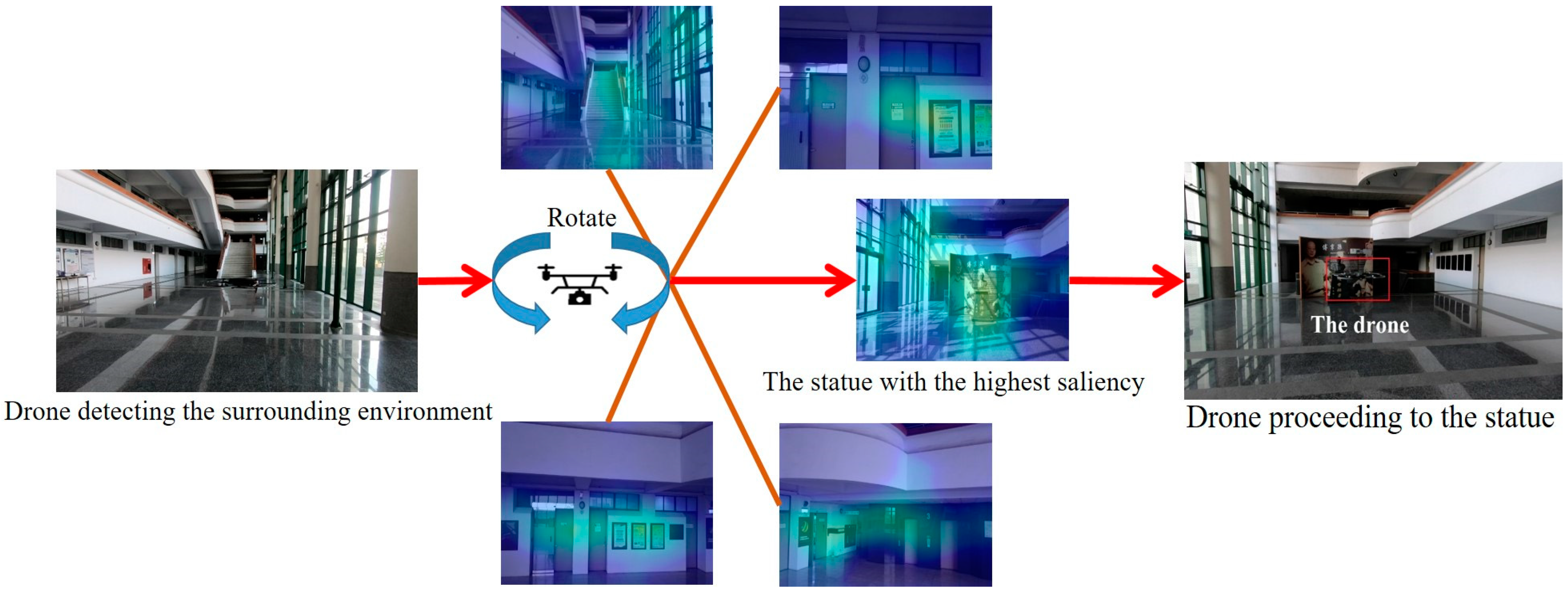
4.1. VIO-Based Drone Exploration Approach
- The drone is directed to rotate by 72° five times and capture one image and its corresponding drone heading angle after each rotation.
- After five rotations, the five captured images are transferred to Lite-TA-MSNet. Compass data (drone heading angles) of the five images are transferred to drone exploration module.
- Before Lite-TA-MSNet analyzes the five images, data fusion uses a map data structure to fuse the file names of the five images and their corresponding drone heading angles.A map is a data structure that stores the key and the corresponding value of the key. Data fusion stores the file names of the five images and the corresponding drone heading angles of each image into the map.After Lite-TA-MSNet finds the image with the highest saliency value, the file name of the image with the highest saliency value is output.Next, data fusion finds the corresponding drone heading angle from the map according to the file name of the image with the highest saliency value.
- The drone heading angle corresponding to the image with the highest saliency value is determined.
- The drone is rotated to the drone heading angle in Step 4.
- The drone is directed to move forward at the drone heading angle in Step 4.RGB images are sent from the drone to the visual SLAM system to record the explored drone trajectory.
- When the drone’s velocity is detected to be close to 0, the drone is stopped, and Step 1 is returned to.
4.2. Max Saliency Clustering
4.3. Nine-Square Division Strategy for Saliency Maps
5. Experiment
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yan, F.; Chen, C.; Xiao, P.; Qi, S.; Wang, Z.; Xiao, R. Review of Visual Saliency Prediction: Development Process from Neurobiological Basis to Deep Models. Appl. Sci. 2022, 12, 309. [Google Scholar] [CrossRef]
- Chu, T.-T.; Chen, P.-H.; Huang, P.-J.; Chen, K.-W. Collaborative Learning of Multiple-Discontinuous-Image Saliency Prediction for Drone Exploration. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 11343–11349. [Google Scholar]
- Liu, J.J.; Hou, Q.; Liu, Z.A.; Cheng, M.M. PoolNet+: Exploring the Potential of Pooling for Salient Object Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2023, 45, 887–904. [Google Scholar] [CrossRef] [PubMed]
- Dang, T.; Papachristos, C.; Alexis, K. Visual saliency-aware receding horizon autonomous exploration with application to aerial robotics. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 2526–2533. [Google Scholar]
- Muhammad, K.; Ahmad, J.; Sajjad, M.; Baik, S.W. Visual saliency models for summarization of diagnostic hysteroscopy videos in healthcare systems. SpringerPlus 2016, 5, 1495. [Google Scholar] [CrossRef] [PubMed]
- Mavani, V.; Raman, S.; Miyapuram, K.P. Facial expression recognition using visual saliency and deep learning. In Proceedings of the IEEE International Conference on Computer Vision Workshops, Venice, Italy, 22–29 October 2017; pp. 2783–2788. [Google Scholar]
- Huang, P.-J.; Lu, C.-A.; Chen, K.-W. Temporally-Aggregating Multiple-Discontinuous-Image Saliency Prediction with Transformer-Based Attention. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; pp. 6571–6577. [Google Scholar]
- Xie, M.-R.; Jung, S.-Y.; Chen, K.-W. Efficient Drone Exploration in Real Unknown Environments. In Proceedings of the SIGGRAPH Asia 2022 Posters, Daegu, Republic of Korea, 6–9 December 2022; Arctile 11. pp. 1–2. [Google Scholar]
- Samadzadegan, F.; Dadrass Javan, F.; Ashtari Mahini, F.; Gholamshahi, M. Detection and Recognition of Drones Based on a Deep Convolutional Neural Network Using Visible Imagery. Aerospace 2022, 9, 31. [Google Scholar] [CrossRef]
- Erdos, D.; Erdos, A.; Watkins, S.E. An experimental UAV system for search and rescue challenge. IEEE Aerosp. Electron. Syst. Mag. 2013, 28, 32–37. [Google Scholar] [CrossRef]
- Xu, Z.; Deng, D.; Shimada, K. Autonomous UAV exploration of dynamic environments via incremental sampling and probabilistic roadmap. IEEE Robot. Autom. Lett. 2021, 6, 2729–2736. [Google Scholar] [CrossRef]
- Zhou, B.; Zhang, Y.; Chen, X.; Shen, S. FUEL: Fast UAV exploration using incremental frontier structure and hierarchical planning. IEEE Robot. Autom. Lett. 2021, 6, 779–786. [Google Scholar] [CrossRef]
- Alarcón, E.P.H.; Ghavifekr, D.B.; Baris, G.; Mugnai, M.; Satler, M.; Avizzano, C.A. An efficient object-oriented exploration algorithm for unmanned aerial vehicles. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021; pp. 330–337. [Google Scholar]
- Dharmadhikari, M.; Dang, T.; Solanka, L.; Loje, J.; Nguyen, H.; Khedekar, N.; Alexis, K. Motion primitives-based path planning for fast and agile exploration using aerial robots. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 179–185. [Google Scholar]
- Chen, K.-W.; Xie, M.-R.; Chen, Y.-M.; Chu, T.-T.; Lin, Y.-B. DroneTalk: An Internet-of-Things-Based Drone System for Last-Mile Drone Delivery. IEEE Trans. Intell. Transp. Syst. 2022, 23, 15204–15217. [Google Scholar] [CrossRef]
- Available online: https://github.com/DJI-Mobile-SDK-Tutorials/Android-VideoStreamDecodingSample (accessed on 8 March 2023).
- Tan, M.; Le, Q. Efficientnet: Rethinking model scaling for convolutional neural networks. In Proceedings of the International Conference on Machine Learning, Long Beach, CA, USA, 9–15 June 2019; pp. 6105–6114. [Google Scholar]
- Zhang, K.; Li, T.; Shen, S.; Liu, B.; Chen, J.; Liu, Q. Adaptive graph convolutional network with attention graph clustering for co-saliency detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 9050–9059. [Google Scholar]
- Mur-Artal, R.; Montiel, J.M.M.; Tardos, J.D. ORB-SLAM: A versatile and accurate monocular SLAM system. IEEE Trans. Robot. 2015, 31, 1147–1163. [Google Scholar] [CrossRef]
- Mur-Artal, R.; Tardós, J.D. Orb-slam2: An open-source slam system for monocular, stereo, and rgb-d cameras. IEEE Trans. Robot. 2017, 33, 1255–1262. [Google Scholar] [CrossRef]
- Available online: https://pytorch.org/tutorials/advanced/cpp_export.html (accessed on 8 March 2023).
- Available online: https://github.com/pytorch/pytorch/issues/49935 (accessed on 8 March 2023).
- Available online: https://github.com/pytorch/pytorch/issues/17106 (accessed on 8 March 2023).
- Available online: https://github.com/pytorch/pytorch/issues/29036 (accessed on 8 March 2023).
- Ester, M.; Kriegel, H.-P.; Sander, J.; Xu, X. A density-based algorithm for discovering clusters in large spatial databases with noise. In Proceedings of the KDD’96—Proceedings of the Second International Conference on Knowledge Discovery and Data Mining, Portland, OR, USA, 2–4 August 1996; pp. 226–231. [Google Scholar]
- Dahou, Y.; Tliba, M.; McGuinness, K.; O’Connor, N. ATSal: An Attention Based Architecture for Saliency Prediction in 360° Videos. In ICPR 2021: Pattern Recognition. ICPR International Workshops and Challenges; Springer: Cham, Switzerland, 2021; pp. 305–320. [Google Scholar]
- Bylinskii, Z.; Judd, T.; Oliva, A.; Torralba, A.; Durand, F. What Do Different Evaluation Metrics Tell Us About Saliency Models? IEEE Trans. Pattern Anal. Mach. Intell. 2019, 41, 740–757. [Google Scholar] [CrossRef] [PubMed]
- Ratner, B. The correlation coefficient: Its values range between +1/−1, or do they? J. Target. Meas. Anal. Mark. 2009, 17, 139–142. [Google Scholar] [CrossRef]
- Available online: https://en.wikipedia.org/wiki/Kullback%E2%80%93Leibler_divergence (accessed on 8 March 2023).
- Available online: https://youtu.be/jGY3yJoGSFE (accessed on 8 March 2023).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Proposed | TA-MSNet | |
|---|---|---|
| CPU Inference Time (s) | 6.0 | 6.4 |
| Number of Parameters (million) | 57.48 | 108.07 |
| CC ↑ | 0.2 | 0.21 |
| SIM ↑ | 0.25 | 0.25 |
| KL ↓ | 1.22 | 1.23 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, M.-R.; Jung, S.-Y.; Chen, K.-W. Three-Dimensional Drone Exploration with Saliency Prediction in Real Unknown Environments. Aerospace 2023, 10, 488. https://doi.org/10.3390/aerospace10050488
Xie M-R, Jung S-Y, Chen K-W. Three-Dimensional Drone Exploration with Saliency Prediction in Real Unknown Environments. Aerospace. 2023; 10(5):488. https://doi.org/10.3390/aerospace10050488
Chicago/Turabian StyleXie, Ming-Ru, Shing-Yun Jung, and Kuan-Wen Chen. 2023. "Three-Dimensional Drone Exploration with Saliency Prediction in Real Unknown Environments" Aerospace 10, no. 5: 488. https://doi.org/10.3390/aerospace10050488