
Path Planning of an Unmanned Combat Aerial Vehicle with an Extended-Treatment-Approach-Based Immune Plasma Algorithm

Abstract
:1. Introduction
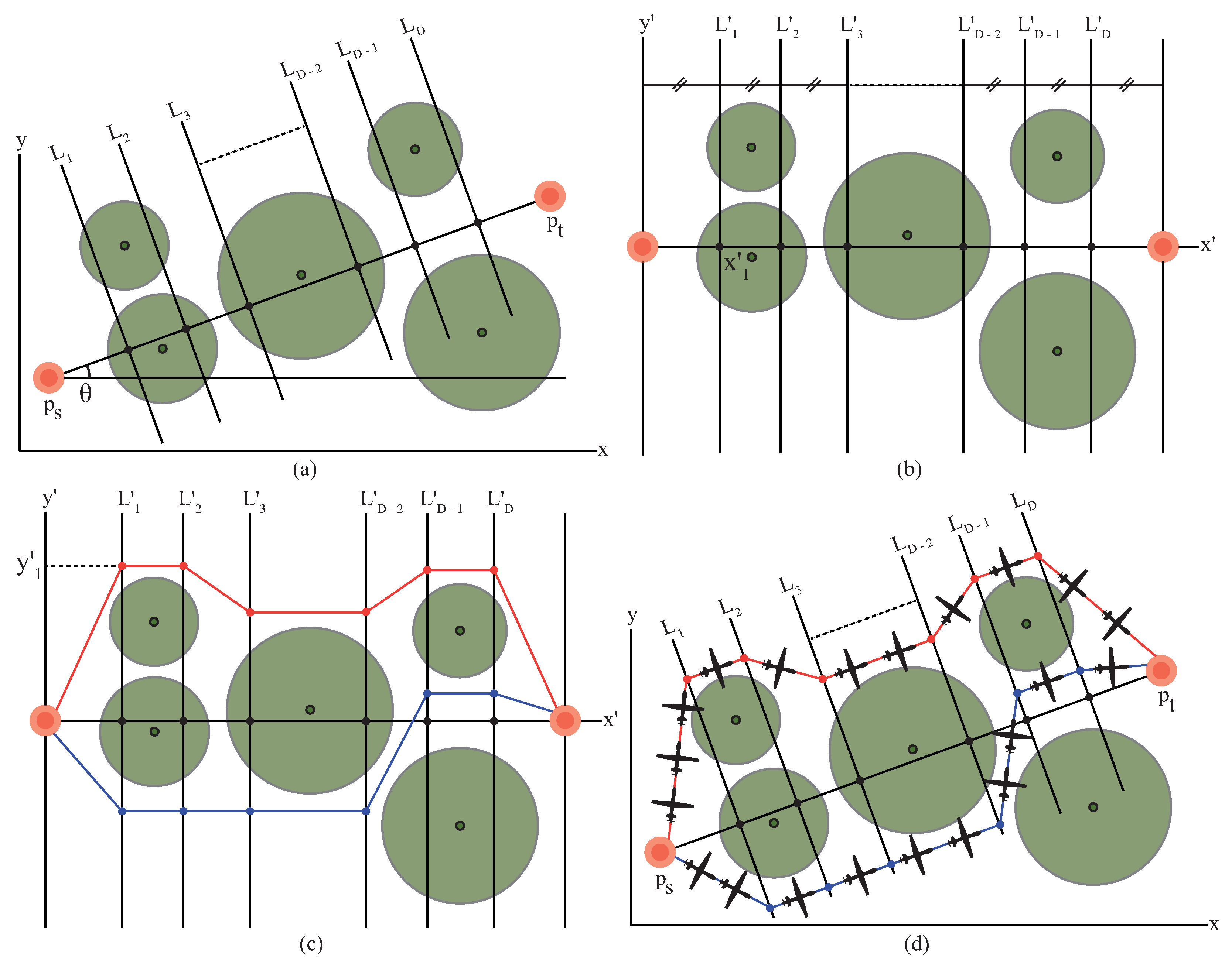
2. Mathematical Description of the UCAV Path-Planning Problem
3. Immune Plasma Algorithm
3.1. Generating Initial Members of the Population
3.2. Distributing Infection within a Population
3.3. Treatment of Receivers with Donors
3.4. Modification of Donor Individuals
4. Details of Extended Treatment Approach
| Algorithm 1 Fundamental steps of extended treatment approach |
|
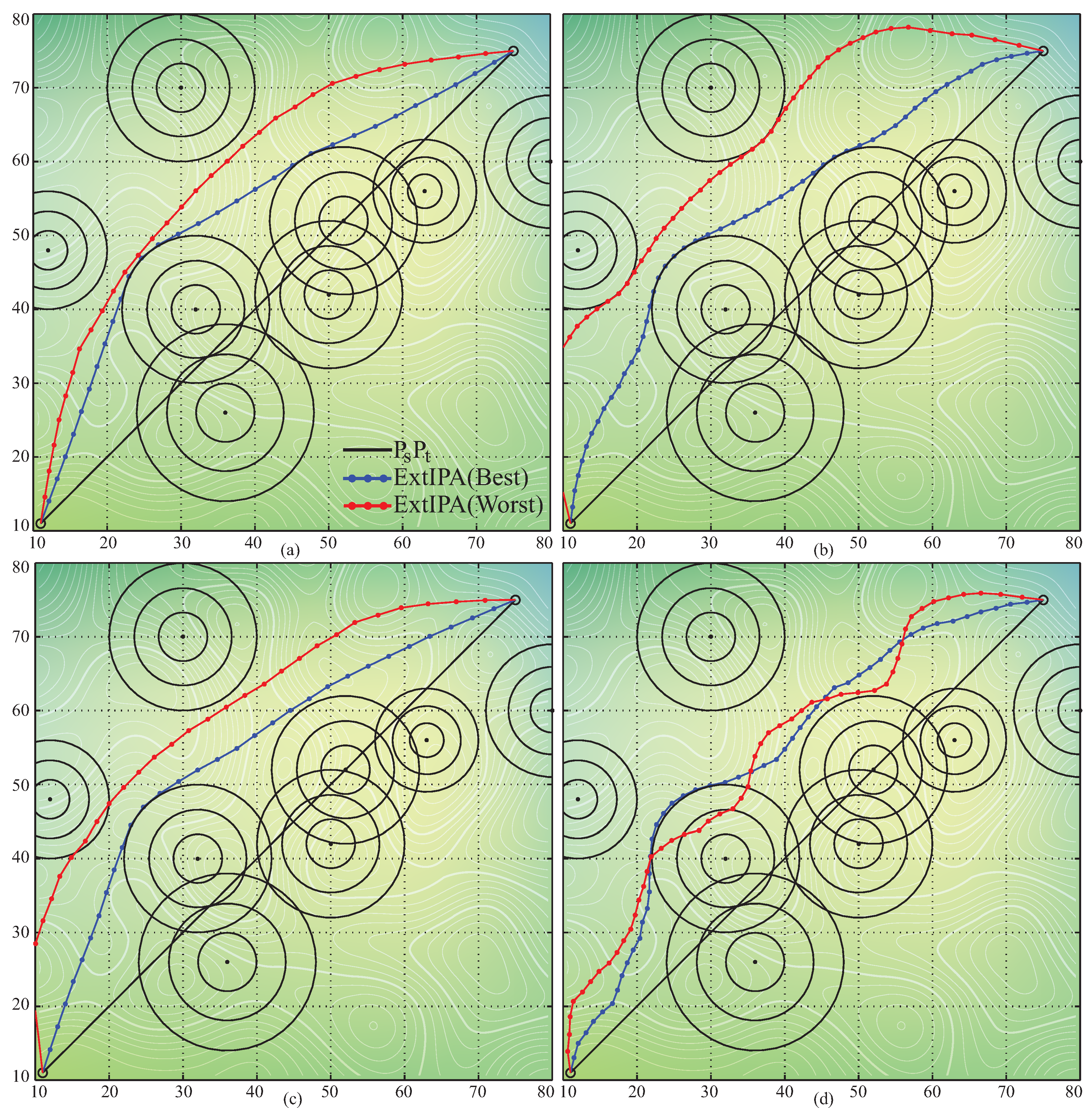
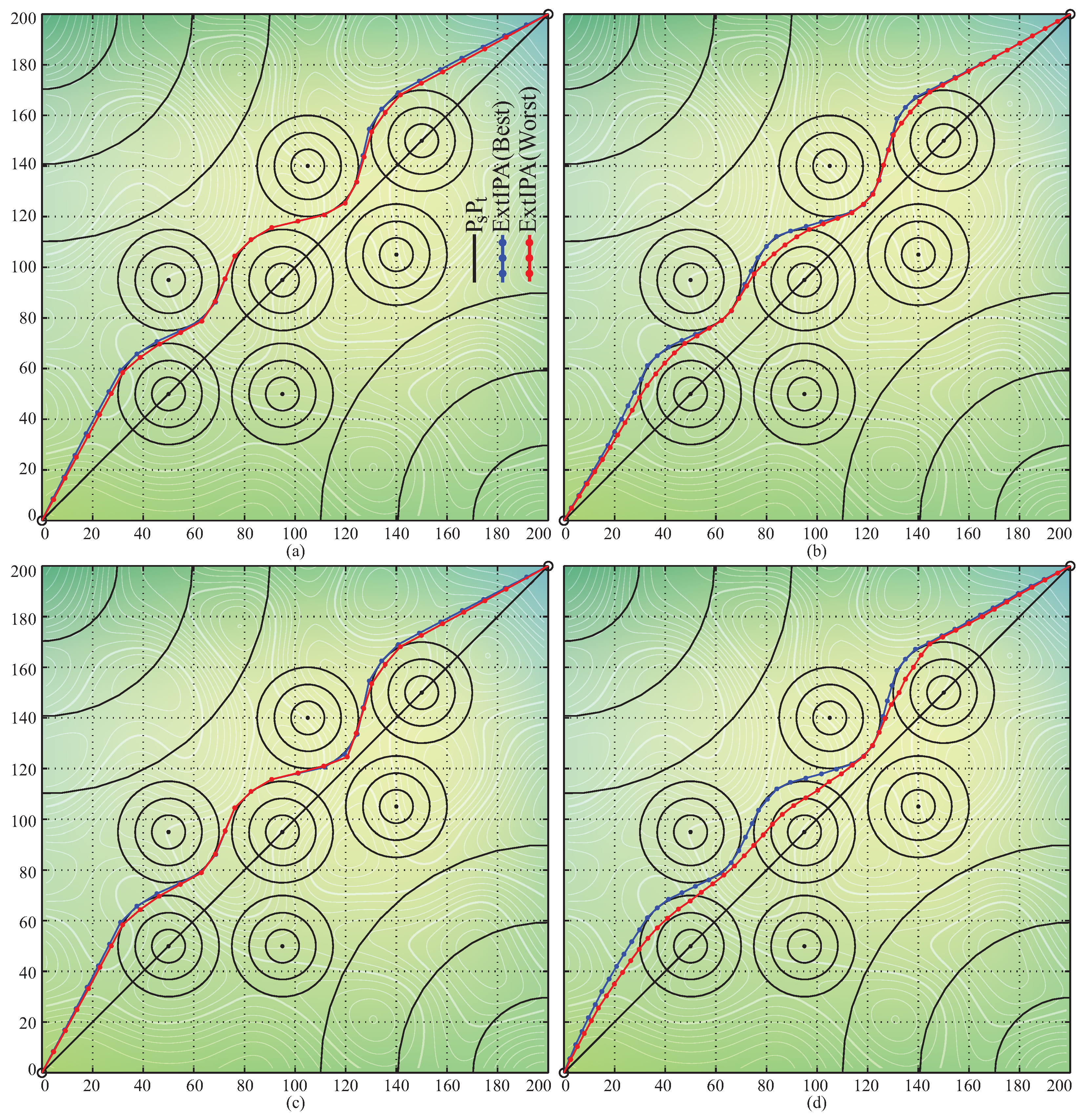
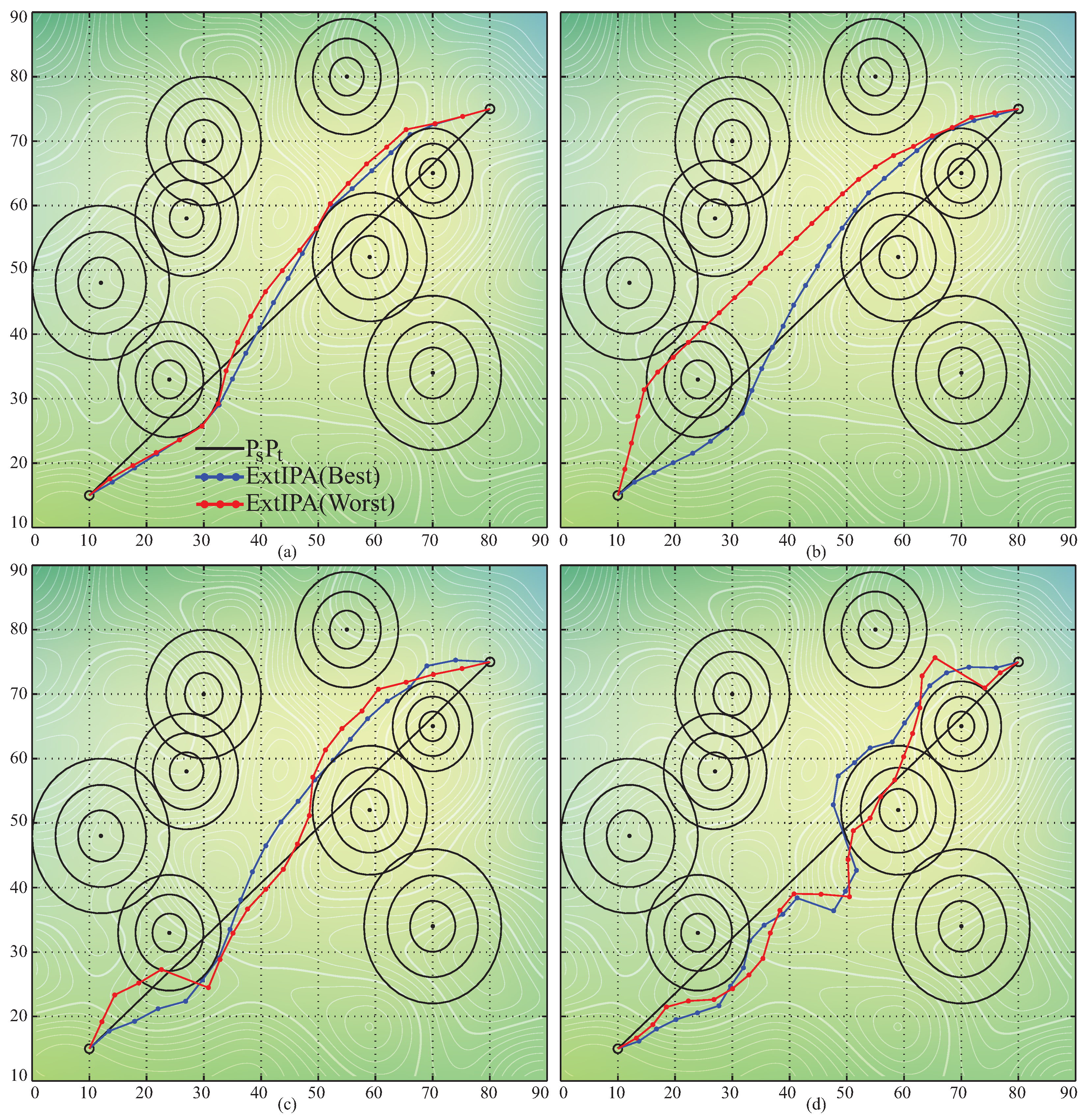
5. Experimental Studies
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tisdale, J.; Kim, Z.; Hedrick, J.K. Autonomous UAV path planning and estimation. IEEE Robot. Autom. Mag. 2009, 16, 35–42. [Google Scholar] [CrossRef]
- Hermand, E.; Nguyen, T.W.; Hosseinzadeh, M.; Garone, E. Constrained control of UAVs in geofencing applications. In Proceedings of the 2018 26th Mediterranean Conference on Control and Automation (MED), Zadar, Croatia, 19–22 June 2018; pp. 217–222. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, R.; Zhao, H.; Li, J.; He, J. Path planning of multiple unmanned aerial vehicles covering multiple regions based on minimum consumption ratio. Aerospace 2023, 10, 93. [Google Scholar] [CrossRef]
- Song, J.; Zhao, K.; Liu, Y. Survey on mission planning of multiple unmanned aerial vehicles. Aerospace 2023, 10, 208. [Google Scholar] [CrossRef]
- Ait Saadi, A.; Soukane, A.; Meraihi, Y.; Benmessaoud Gabis, A.; Mirjalili, S.; Ramdane-Cherif, A. UAV path planning using optimization approaches: A survey. Arch. Comput. Methods Eng. 2022, 29, 4233–4284. [Google Scholar] [CrossRef]
- Bal, M. An overview of path planning technologies for unmanned aerial vehicles. Therm. Sci. 2022, 26, 2865–2876. [Google Scholar] [CrossRef]
- Wu, Y. A survey on population-based meta-heuristic algorithms for motion planning of aircraft. Swarm Evol. Comput. 2021, 62, 100844. [Google Scholar] [CrossRef]
- Majeed, A.; Hwang, S.O. A multi-objective coverage path planning algorithm for UAVs to cover spatially distributed regions in urban environments. Aerospace 2021, 8, 343. [Google Scholar] [CrossRef]
- Saeed, R.A.; Omri, M.; Abdel-Khalek, S.; Ali, E.S.; Alotaibi, M.F. Optimal path planning for drones based on swarm intelligence algorithm. Neural Comput. Appl. 2022, 34, 10133–10155. [Google Scholar] [CrossRef]
- Xu, C.; Duan, H.; Liu, F. Chaotic artificial bee colony approach to Uninhabited Combat Air Vehicle (UCAV) path planning. Aerosp. Sci. Technol. 2010, 14, 535–541. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, L.; Wang, S. UCAV path planning based on FSCABC. Inf.-Int. Interdiscip. J. 2011, 14, 687–692. [Google Scholar]
- Zhang, Y.; Wu, L.; Wang, S. UCAV path planning by fitness-scaling adaptive chaotic particle swarm optimization. Math. Probl. Eng. 2013, 2013. [Google Scholar] [CrossRef]
- Li, P.; Duan, H. Path planning of unmanned aerial vehicle based on improved gravitational search algorithm. Sci. China Technol. Sci. 2012, 55, 2712–2719. [Google Scholar] [CrossRef]
- Fu, Z.F. Path planning of UCAV based on a modified GeesePSO algorithm. In Proceedings of the International Conference on Intelligent Computing, Huangshan, China, 25–29 July 2012; pp. 471–478. [Google Scholar] [CrossRef]
- Wang, G.G.; Guo, L.; Duan, H.; Liu, L.; Wang, H. A modified firefly algorithm for UCAV path planning. Int. J. Hybrid Inf. Technol. 2012, 5, 123–144. [Google Scholar]
- Wang, G.G.; Guo, L.; Duan, H.; Wang, H.; Liu, L.; Shao, M. A hybrid metaheuristic DE/CS algorithm for UCAV three-dimension path planning. Sci. World J. 2012, 2012, 583973. [Google Scholar] [CrossRef] [PubMed]
- Wang, G.G.; Guo, L.; Duan, H.; Liu, L.; Wang, H. A bat algorithm with mutation for UCAV path planning. Sci. World J. 2012, 2012, 418946. [Google Scholar] [CrossRef]
- Wang, G.G.; Chu, H.E.; Mirjalili, S. Three-dimensional path planning for UCAV using an improved bat algorithm. Aerosp. Sci. Technol. 2016, 49, 231–238. [Google Scholar] [CrossRef]
- Zhu, W.; Duan, H. Chaotic predator–prey biogeography-based optimization approach for UCAV path planning. Aerosp. Sci. Technol. 2014, 32, 153–161. [Google Scholar] [CrossRef]
- Heidari, A.; Abbaspour, R. Improved black hole algorithm for efficient low observable UCAV path planning in constrained aerospace. Adv. Comput. Sci. Int. J. 2014, 3, 87–92. [Google Scholar]
- Tang, Z.; Zhou, Y. A glowworm swarm optimization algorithm for uninhabited combat air vehicle path planning. J. Intell. Syst. 2015, 24, 69–83. [Google Scholar] [CrossRef]
- Yu, G.; Song, H.; Gao, J. Unmanned aerial vehicle path planning based on TLBO algorithm. Int. J. Smart Sens. Intell. Syst. 2014, 7, 1310–1325. [Google Scholar] [CrossRef]
- Zhang, X.; Duan, H. An improved constrained differential evolution algorithm for unmanned aerial vehicle global route planning. Appl. Soft Comput. 2015, 26, 270–284. [Google Scholar] [CrossRef]
- Zhou, Q.; Zhou, Y.; Chen, X. A wolf colony search algorithm based on the complex method for uninhabited combat air vehicle path planning. Int. J. Hybrid Inf. Technol. 2014, 7, 183–200. [Google Scholar] [CrossRef]
- Li, B.; Gong, L.G.; Yang, W.L. An improved artificial bee colony algorithm based on balance-evolution strategy for unmanned combat aerial vehicle path planning. Sci. World J. 2014, 2014, 232704. [Google Scholar] [CrossRef] [PubMed]
- Zhang, B.; Duan, H. Three-dimensional path planning for uninhabited combat aerial vehicle based on predator-prey pigeon-inspired optimization in dynamic environment. IEEE/ACM Trans. Comput. Biol. Bioinform. 2015, 14, 97–107. [Google Scholar] [CrossRef]
- Zhou, Y.; Bao, Z.; Wang, R.; Qiao, S.; Zhou, Y. Quantum wind driven optimization for unmanned combat air vehicle path planning. Appl. Sci. 2015, 5, 1457–1483. [Google Scholar] [CrossRef]
- Zhang, S.; Zhou, Y.; Li, Z.; Pan, W. Grey wolf optimizer for unmanned combat aerial vehicle path planning. Adv. Eng. Softw. 2016, 99, 121–136. [Google Scholar] [CrossRef]
- Luo, Q.; Li, L.; Zhou, Y. A quantum encoding bat algorithm for uninhabited combat aerial vehicle path planning. Int. J. Innov. Comput. Appl. 2017, 8, 182–193. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, R.; Yang, J.; Ding, K.; Li, Y.; Hu, J. Modified collective decision optimization algorithm with application in trajectory planning of UAV. Appl. Intell. 2018, 48, 2328–2354. [Google Scholar] [CrossRef]
- Alihodzic, A.; Tuba, E.; Capor-Hrosik, R.; Dolicanin, E.; Tuba, M. Unmanned aerial vehicle path planning problem by adjusted elephant herding optimization. In Proceedings of the 2017 25th Telecommunication Forum (Telfor), Belgrade, Serbia, 21–22 November 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Alihodzic, A.; Hasic, D.; Selmanovic, E. An effective guided fireworks algorithm for solving UCAV path planning problem. In Proceedings of the International Conference on Numerical Methods and Applications, Borovets, Bulgaria, 20–24 August 2018; pp. 29–38. [Google Scholar] [CrossRef]
- Miao, F.; Zhou, Y.; Luo, Q. A modified symbiotic organisms search algorithm for unmanned combat aerial vehicle route planning problem. J. Oper. Res. Soc. 2019, 70, 21–52. [Google Scholar] [CrossRef]
- Dolicanin, E.; Fetahovic, I.; Tuba, E.; Capor-Hrosik, R.; Tuba, M. Unmanned combat aerial vehicle path planning by brain storm optimization algorithm. Stud. Inform. Control 2018, 27, 15–24. [Google Scholar] [CrossRef]
- Pan, J.S.; Liu, J.L.; Hsiung, S.C. Chaotic cuckoo search algorithm for solving unmanned combat aerial vehicle path planning problems. In Proceedings of the 2019 11th International Conference on Machine Learning and Computing, Zhuhai, China, 22–24 February 2019; pp. 224–230. [Google Scholar] [CrossRef]
- Pan, J.S.; Liu, J.L.; Liu, E.J. Improved whale optimization algorithm and its application to UCAV path planning problem. In Proceedings of the International Conference on Genetic and Evolutionary Computing, Qingdao, China, 1–3 November 2019; pp. 37–47. [Google Scholar] [CrossRef]
- Pan, J.S.; Liu, N.; Chu, S.C. A hybrid differential evolution algorithm and its application in unmanned combat aerial vehicle path planning. IEEE Access 2020, 8, 17691–17712. [Google Scholar] [CrossRef]
- Lin, N.; Tang, J.; Li, X.; Zhao, L. A novel improved bat algorithm in UAV path planning. J. Comput. Mater. Contin. 2019, 61, 323–344. [Google Scholar] [CrossRef]
- Qu, C.; Gai, W.; Zhong, M.; Zhang, J. A novel reinforcement learning based grey wolf optimizer algorithm for unmanned aerial vehicles (UAVs) path planning. Appl. Soft Comput. 2020, 89, 106099. [Google Scholar] [CrossRef]
- Qu, C.; Gai, W.; Zhang, J.; Zhong, M. A novel hybrid grey wolf optimizer algorithm for unmanned aerial vehicle (UAV) path planning. Knowl.-Based Syst. 2020, 194, 105530. [Google Scholar] [CrossRef]
- Yi, J.H.; Lu, M.; Zhao, X.J. Quantum inspired monarch butterfly optimisation for UCAV path planning navigation problem. Int. J.-Bio-Inspired Comput. 2020, 15, 75–89. [Google Scholar] [CrossRef]
- Wu, C.; Huang, X.; Luo, Y.; Leng, S. An improved fast convergent artificial bee colony algorithm for unmanned aerial vehicle path planning in battlefield environment. In Proceedings of the 2020 IEEE 16th International Conference on Control & Automation (ICCA), Sapporo, Japan, 6–9 July 2020; pp. 360–365. [Google Scholar] [CrossRef]
- Chen, Y.; Pi, D.; Xu, Y. Neighborhood global learning based flower pollination algorithm and its application to unmanned aerial vehicle path planning. Expert Syst. Appl. 2021, 170, 114505. [Google Scholar] [CrossRef]
- Zhu, H.; Wang, Y.; Ma, Z.; Li, X. A comparative study of swarm intelligence algorithms for ucav path-planning problems. Mathematics 2021, 9, 171. [Google Scholar] [CrossRef]
- Zhu, H.; Wang, Y.; Li, X. UCAV path planning for avoiding obstacles using cooperative co-evolution spider monkey optimization. Knowl.-Based Syst. 2022, 246, 108713. [Google Scholar] [CrossRef]
- Zhou, X.; Gao, F.; Fang, X.; Lan, Z. Improved bat algorithm for UAV path planning in three-dimensional space. IEEE Access 2021, 9, 20100–20116. [Google Scholar] [CrossRef]
- Wu, P.; Li, T.; Song, G. UCAV path planning based on improved chaotic particle swarm optimization. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020; pp. 1069–1073. [Google Scholar] [CrossRef]
- Xu, H.; Jiang, S.; Zhang, A. Path planning for unmanned aerial vehicle using amix-strategy-based gravitational search algorithm. IEEE Access 2021, 9, 57033–57045. [Google Scholar] [CrossRef]
- Jiang, W.; Lyu, Y.; Li, Y.; Guo, Y.; Zhang, W. UAV path planning and collision avoidance in 3D environments based on POMPD and improved grey wolf optimizer. Aerosp. Sci. Technol. 2022, 121, 107314. [Google Scholar] [CrossRef]
- Wang, X.; Pan, J.S.; Yang, Q.; Kong, L.; Snášel, V.; Chu, S.C. Modified mayfly algorithm for UAV path planning. Drones 2022, 6, 134. [Google Scholar] [CrossRef]
- Niu, Y.; Yan, X.; Wang, Y.; Niu, Y. An adaptive neighborhood-based search enhanced artificial ecosystem optimizer for UCAV path planning. Expert Syst. Appl. 2022, 208, 118047. [Google Scholar] [CrossRef]
- Jia, Y.; Qu, L.; Li, X. A double-layer coding model with a rotation-based particle swarm algorithm for unmanned combat aerial vehicle path planning. Eng. Appl. Artif. Intell. 2022, 116, 105410. [Google Scholar] [CrossRef]
- Aslan, S.; Demirci, S. Immune plasma algorithm: A novel meta-heuristic for optimization problems. IEEE Access 2020, 8, 220227–220245. [Google Scholar] [CrossRef]
- Kisa, M.; Demirci, S.; Arslan, S.; Aslan, S. Solving channel assignment problem in cognitive radio networks with immune plasma algorithm. In Proceedings of the 2021 6th International Conference on Computer Science and Engineering (UBMK), Ankara, Turkey, 15–17 September 2021; pp. 818–822. [Google Scholar] [CrossRef]
- Arslan, S. Solving the problem of time series prediction using immune plasma programming. Avrupa Bilim Teknol. Derg. 2022, 219–224. [Google Scholar] [CrossRef]
- Tasdemir, A.; Demirci, S.; Aslan, S. Performance investigation of immune plasma algorithm on solving wireless sensor deployment problem. In Proceedings of the 2022 9th International Conference on Electrical and Electronics Engineering (ICEEE), Alanya, Turkey, 29–31 March 2022; pp. 296–300. [Google Scholar] [CrossRef]
- Aslan, S.; Demirci, S. An improved immune plasma algorithm with a regional pandemic restriction. Signal Image Video Process. 2022, 16, 2093–2101. [Google Scholar] [CrossRef]
- Ajay, V.; Nesasudha, M. Detection of attackers in cognitive radio network using optimized neural networks. Intell. Autom. Soft Comput. 2022, 34, 193–204. [Google Scholar] [CrossRef]
- Aslan, S.; Erkin, T. An immune plasma algorithm based approach for UCAV path planning. J. King Saud-Univ.-Comput. Inf. Sci. 2023, 35, 56–69. [Google Scholar] [CrossRef]
- Aslan, S.; Karaboga, D.; Badem, H. A new artificial bee colony algorithm employing intelligent forager forwarding strategies. Appl. Soft Comput. 2020, 96, 106656. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sc. | Threat Centers | Threat Radius | Threat Grade | Start-Target Point |
|---|---|---|---|---|
| 1 | (52, 52), (32, 40), (12, 48), (36, 26), (80, 60), (63, 56), (50, 42), (30, 70) | 10, 10, 8, 12, 9, 7, 10, 10 | 2, 10, 1, 2, 3, 5, 2, 4 | (11, 11)–(75, 75) |
| 2 | (0, 200), (200, 0), (50, 50), (95, 95), (150, 150), (95, 50), (50, 95), (140, 105), (105, 140) | 90, 90, 20, 20, 20, 20, 20, 20, 20 | 7, 7, 5, 5 5, 6, 5, 6, 5 | (0, 0)–(200, 200) |
| 3 | (59, 52), (55, 80), (27, 58), (24, 33), (12, 48), (70, 65), (70, 34), (70, 30) | 10, 9, 9, 9, 12, 7, 12, 10 | 9, 7, 3, 12, 1, 5, 13, 2 | (10, 15)–(80, 75) |
| 4 | (10, 50), (20, 20), (30, 42), (30, 80), (50, 55), (60, 10), (60, 80), (65, 38), (75, 65), (90, 80) | 10, 9, 8, 10, 10, 10, 10, 12, 8, 10 | 8, 6, 5, 4, 7, 6, 7, 6, 8, 10 | (0, 0)–(80, 100) |
| 5 | (45, 50), (12, 40), (32, 68), (36, 26), (58, 80) | 10, 10, 8, 12, 9 | 2, 10, 1, 2, 3 | (10, 10)–(55, 100) |
| Sc. | D | ||||||
|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |||
| 1 | 30 | Mean | 48.595 | 48.593 | 48.716 | 48.942 | 49.676 |
| Best | 48.158 | 48.144 | 48.160 | 48.200 | 48.368 | ||
| Worst | 49.771 | 50.245 | 50.562 | 51.697 | 53.322 | ||
| Std. | 0.450 | 0.606 | 0.702 | 0.795 | 1.285 | ||
| 50 | Mean | 51.167 | 52.057 | 53.198 | 55.562 | 59.367 | |
| Best | 48.600 | 48.694 | 48.829 | 49.875 | 51.629 | ||
| Worst | 54.260 | 57.969 | 61.228 | 62.909 | 66.841 | ||
| Std. | 1.783 | 2.534 | 3.069 | 3.908 | 4.407 | ||
| 2 | 30 | Mean | 152.053 | 153.018 | 152.951 | 153.266 | 153.515 |
| Best | 149.743 | 149.734 | 149.730 | 149.750 | 150.047 | ||
| Worst | 153.706 | 155.659 | 155.673 | 155.820 | 155.624 | ||
| Std. | 1.347 | 1.659 | 1.666 | 1.844 | 1.486 | ||
| 50 | Mean | 153.816 | 156.198 | 156.791 | 157.848 | 159.582 | |
| Best | 149.273 | 151.898 | 149.288 | 152.155 | 153.410 | ||
| Worst | 157.542 | 159.238 | 160.430 | 162.613 | 164.025 | ||
| Std. | 2.188 | 2.300 | 2.660 | 2.840 | 2.780 | ||
| 3 | 20 | Mean | 47.969 | 52.358 | 49.969 | 55.187 | 49.727 |
| Best | 47.812 | 47.829 | 47.956 | 48.084 | 47.970 | ||
| Worst | 48.373 | 58.260 | 63.699 | 63.723 | 58.526 | ||
| Std. | 0.131 | 4.628 | 4.608 | 6.616 | 2.529 | ||
| 25 | Mean | 50.098 | 57.073 | 50.589 | 53.720 | 56.734 | |
| Best | 48.019 | 47.946 | 48.009 | 48.411 | 48.983 | ||
| Worst | 63.774 | 68.047 | 67.839 | 62.637 | 69.766 | ||
| Std. | 4.079 | 7.450 | 4.478 | 5.190 | 7.432 | ||
| 4 | 20 | Mean | 66.397 | 66.570 | 66.596 | 66.664 | 67.480 |
| Best | 66.363 | 66.345 | 66.370 | 66.335 | 66.942 | ||
| Worst | 66.594 | 66.993 | 66.937 | 67.315 | 68.466 | ||
| Std. | 0.074 | 0.172 | 0.167 | 0.265 | 0.413 | ||
| 30 | Mean | 68.170 | 67.617 | 68.162 | 70.649 | 72.665 | |
| Best | 67.207 | 66.870 | 67.152 | 68.033 | 68.649 | ||
| Worst | 70.135 | 68.644 | 70.628 | 83.549 | 82.528 | ||
| Std. | 0.958 | 0.669 | 0.716 | 2.534 | 3.567 | ||
| Sc. | D | |||||||
|---|---|---|---|---|---|---|---|---|
| 20 | 30 | 40 | 50 | 75 | 100 | |||
| 1 | 30 | Mean | 48.526 | 48.595 | 48.835 | 48.606 | 49.223 | 49.472 |
| Best | 48.160 | 48.158 | 48.185 | 48.181 | 48.197 | 48.206 | ||
| Worst | 49.420 | 49.771 | 50.173 | 50.146 | 51.569 | 52.023 | ||
| Std. | 0.404 | 0.450 | 0.597 | 0.497 | 1.009 | 1.190 | ||
| 50 | Mean | 51.173 | 51.167 | 51.556 | 51.511 | 53.373 | 56.069 | |
| Best | 48.435 | 48.600 | 48.602 | 48.863 | 49.467 | 49.683 | ||
| Worst | 53.388 | 54.260 | 56.341 | 56.046 | 57.929 | 63.702 | ||
| Std. | 1.579 | 1.783 | 2.202 | 2.074 | 2.355 | 3.523 | ||
| 2 | 30 | Mean | 152.234 | 152.053 | 151.950 | 152.261 | 152.193 | 152.146 |
| Best | 149.744 | 149.743 | 149.734 | 149.751 | 149.764 | 149.737 | ||
| Worst | 153.747 | 153.706 | 153.720 | 153.834 | 155.036 | 154.023 | ||
| Std. | 1.456 | 1.347 | 1.340 | 1.371 | 1.551 | 1.349 | ||
| 50 | Mean | 154.318 | 153.816 | 154.440 | 155.328 | 156.165 | 157.016 | |
| Best | 149.298 | 149.273 | 149.544 | 149.656 | 150.530 | 150.619 | ||
| Worst | 157.417 | 157.542 | 158.112 | 158.697 | 160.588 | 161.196 | ||
| Std. | 1.959 | 2.188 | 1.956 | 2.037 | 2.618 | 2.558 | ||
| 3 | 20 | Mean | 50.744 | 47.969 | 48.269 | 50.380 | 52.674 | 55.004 |
| Best | 47.820 | 47.812 | 48.003 | 48.094 | 48.163 | 48.887 | ||
| Worst | 63.587 | 48.373 | 50.386 | 57.907 | 64.312 | 61.872 | ||
| Std. | 6.070 | 0.131 | 0.452 | 3.548 | 6.082 | 4.588 | ||
| 25 | Mean | 56.700 | 50.098 | 53.058 | 54.155 | 60.303 | 61.740 | |
| Best | 47.849 | 48.019 | 48.216 | 48.246 | 49.302 | 54.614 | ||
| Worst | 63.880 | 63.774 | 64.016 | 64.329 | 72.984 | 72.348 | ||
| Std. | 6.813 | 4.079 | 6.608 | 5.864 | 9.532 | 5.049 | ||
| 4 | 20 | Mean | 66.452 | 66.497 | 66.720 | 66.875 | 67.760 | 68.036 |
| Best | 66.263 | 66.363 | 66.473 | 66.468 | 66.976 | 67.263 | ||
| Worst | 66.748 | 66.594 | 66.967 | 67.564 | 69.513 | 69.935 | ||
| Std. | 0.123 | 0.074 | 0.180 | 0.306 | 0.889 | 0.518 | ||
| 30 | Mean | 67.300 | 68.170 | 68.123 | 69.796 | 72.439 | 78.074 | |
| Best | 66.706 | 67.207 | 67.564 | 68.193 | 68.574 | 71.222 | ||
| Worst | 67.752 | 70.135 | 69.620 | 72.624 | 76.452 | 86.972 | ||
| Std. | 0.352 | 0.958 | 0.525 | 1.241 | 2.710 | 5.664 | ||
| D | |||||||
|---|---|---|---|---|---|---|---|
| 20 | 30 | 40 | 50 | 75 | 100 | ||
| 5 | Mean | 50.384 | 50.384 | 50.389 | 50.391 | 50.387 | 50.393 |
| Best | 50.384 | 50.384 | 50.387 | 50.389 | 50.386 | 50.388 | |
| Worst | 50.385 | 50.385 | 50.390 | 50.393 | 50.389 | 50.396 | |
| Std. | 0.002 | 0.001 | 0.001 | 0.002 | 0.001 | 0.003 | |
| 10 | Mean | 50.375 | 50.372 | 50.379 | 50.375 | 50.382 | 50.396 |
| Best | 50.371 | 50.370 | 50.371 | 50.370 | 50.375 | 50.372 | |
| Worst | 50.389 | 50.377 | 50.385 | 50.385 | 50.395 | 50.433 | |
| Std. | 0.005 | 0.003 | 0.004 | 0.004 | 0.006 | 0.020 | |
| 15 | Mean | 50.373 | 50.402 | 50.431 | 50.457 | 50.765 | 51.068 |
| Best | 50.370 | 50.378 | 50.389 | 50.389 | 50.417 | 50.430 | |
| Worst | 50.381 | 50.438 | 50.491 | 50.703 | 51.259 | 52.782 | |
| Std. | 0.003 | 0.022 | 0.043 | 0.091 | 0.308 | 0.792 | |
| 20 | Mean | 50.472 | 50.457 | 50.740 | 50.821 | 51.491 | 52.351 |
| Best | 50.375 | 50.395 | 50.407 | 50.458 | 50.633 | 50.836 | |
| Worst | 50.595 | 50.595 | 51.537 | 52.190 | 53.378 | 54.884 | |
| Std. | 0.070 | 0.057 | 0.392 | 0.464 | 0.731 | 1.081 | |
| 25 | Mean | 50.957 | 51.031 | 51.254 | 51.327 | 52.853 | 53.923 |
| Best | 50.497 | 50.472 | 50.479 | 50.771 | 50.687 | 51.530 | |
| Worst | 53.463 | 52.156 | 53.793 | 52.498 | 54.850 | 57.218 | |
| Std. | 0.649 | 0.516 | 0.755 | 0.476 | 1.433 | 1.895 | |
| 30 | Mean | 51.345 | 51.602 | 52.291 | 52.962 | 53.873 | 55.254 |
| Best | 50.524 | 50.673 | 51.240 | 51.116 | 51.340 | 51.765 | |
| Worst | 52.165 | 53.083 | 53.467 | 56.638 | 56.377 | 62.244 | |
| Std. | 0.520 | 0.781 | 0.613 | 1.622 | 1.570 | 3.101 | |
| 35 | Mean | 52.150 | 52.446 | 53.464 | 54.362 | 56.593 | 62.090 |
| Best | 50.895 | 51.010 | 51.933 | 50.859 | 51.193 | 52.200 | |
| Worst | 54.227 | 55.444 | 59.277 | 58.869 | 62.877 | 68.912 | |
| Std. | 0.919 | 1.191 | 1.194 | 2.016 | 3.619 | 4.815 | |
| 40 | Mean | 52.843 | 53.365 | 54.230 | 57.676 | 60.464 | 64.279 |
| Best | 51.608 | 50.868 | 51.947 | 52.673 | 52.018 | 52.446 | |
| Worst | 55.143 | 55.475 | 56.874 | 61.631 | 71.521 | 81.205 | |
| Std. | 0.900 | 1.482 | 1.435 | 2.741 | 5.592 | 8.667 | |
| Sc. | D | ExtIPA | IPA | ABC | I-ABC | IF-ABC | BE-ABC | |
|---|---|---|---|---|---|---|---|---|
| 1 | 30 | Mean | 48.593 | 49.289 | 52.988 | 60.459 | 51.939 | 50.456 |
| Std. | 0.606 | 0.465 | 1.425 | 3.288 | 1.343 | 0.672 | ||
| Rank | 1 | 2 | 5 | 6 | 4 | 3 | ||
| 50 | Mean | 52.057 | 59.354 | 59.972 | 80.174 | 59.956 | 54.982 | |
| Std. | 2.534 | 4.914 | 2.913 | 7.757 | 2.214 | 2.231 | ||
| Rank | 1 | 3 | 5 | 6 | 4 | 2 | ||
| 2 | 30 | Mean | 152.053 | 151.499 | 154.927 | 185.792 | 153.583 | 153.410 |
| Std. | 1.347 | 1.285 | 2.512 | 3.754 | 0.492 | 0.554 | ||
| Rank | 2 | 1 | 5 | 6 | 4 | 3 | ||
| 50 | Mean | 153.816 | 157.368 | 157.204 | 164.990 | 157.814 | 153.524 | |
| Std. | 2.188 | 1.596 | 3.603 | 2.811 | 1.905 | 1.047 | ||
| Rank | 2 | 4 | 3 | 6 | 5 | 1 | ||
| Average Rank | 1.500 | 2.500 | 4.500 | 6.000 | 4.250 | 2.250 | ||
| Overall Rank | 1 | 3 | 5 | 6 | 4 | 2 | ||
| Sc. | D | ExtIPA | IPA | DE | PSO | BA | WDO | QPSO | QBA | QWDO | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 3 | 20 | Mean | 47.969 | 52.703 | 50.073 | 53.869 | 50.861 | 66.955 | 49.524 | 50.958 | 49.503 |
| Best | 47.812 | 50.211 | 47.935 | 50.434 | 48.069 | 57.013 | 48.018 | 48.134 | 47.868 | ||
| Worst | 48.373 | 55.154 | 51.575 | 59.962 | 52.765 | 74.820 | 51.634 | 56.006 | 50.828 | ||
| Std. | 0.131 | 2.820 | - | - | - | - | - | - | - | ||
| Rank | 1 | 7 | 4 | 8 | 5 | 9 | 3 | 6 | 2 | ||
| 25 | Mean | 50.098 | 62.164 | 49.842 | 51.481 | 50.901 | 66.668 | 49.679 | 50.071 | 48.814 | |
| Best | 48.019 | 54.652 | 48.126 | 49.246 | 48.163 | 58.430 | 48.397 | 48.333 | 47.807 | ||
| Worst | 63.774 | 71.302 | 52.110 | 54.246 | 67.441 | 75.967 | 51.307 | 53.423 | 49.749 | ||
| Std. | 4.079 | 5.516 | - | - | - | - | - | - | - | ||
| Rank | 5 | 8 | 3 | 7 | 6 | 9 | 2 | 4 | 1 | ||
| Average Rank | 3 | 7.5 | 3.5 | 7.5 | 5.5 | 9 | 2.5 | 5 | 1.5 | ||
| Overall Rank | 3 | 7 | 4 | 7 | 6 | 9 | 2 | 5 | 1 | ||
| Sc. | D | ExtIPA | IPA | CIJADE | PSO | DE | ABC | JADE | CIPDE | |
|---|---|---|---|---|---|---|---|---|---|---|
| 4 | 20 | Mean | 66.397 | 68.297 | 66.426 | 70.794 | 67.397 | 67.260 | 66.524 | 66.469 |
| Best | 66.363 | 67.297 | 66.298 | 67.663 | 66.730 | 66.631 | 66.321 | 66.331 | ||
| Worst | 66.594 | 70.009 | 66.646 | 73.960 | 72.571 | 68.184 | 67.007 | 66.751 | ||
| Std. | 0.074 | 0.682 | 0.087 | 1.869 | 1.249 | 0.512 | 0.193 | 0.126 | ||
| Rank | 1 | 7 | 2 | 8 | 6 | 5 | 4 | 3 | ||
| 30 | Mean | 68.170 | 76.496 | 70.297 | 78.982 | 75.197 | 72.656 | 70.407 | 71.033 | |
| Best | 67.207 | 71.334 | 67.622 | 73.753 | 71.766 | 67.845 | 67.521 | 68.170 | ||
| Worst | 70.135 | 82.250 | 75.256 | 85.561 | 81.645 | 76.718 | 81.631 | 78.238 | ||
| Std. | 0.958 | 2.823 | 1.813 | 3.828 | 2.434 | 2.147 | 3.026 | 2.502 | ||
| Rank | 1 | 7 | 2 | 8 | 6 | 5 | 3 | 4 | ||
| Average Rank | 1 | 7 | 2 | 8 | 6 | 5 | 3.500 | 3.500 | ||
| Overall Rank | 1 | 7 | 2 | 8 | 6 | 5 | 3 | 3 | ||
| Sc. | D | ExtIPA | IPA | ABC | BA | BAM | ACO | BBO | DE | ES | FA | GA | MFA | PBIL | PSO | SGA | PGSO | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 5 | 5 | Mean | 50.384 | 50.384 | 50.384 | 106.483 | 59.054 | 61.520 | 72.730 | 58.596 | 80.720 | 58.750 | 60.470 | 59.167 | 66.139 | 59.906 | 60.501 | 53.669 |
| Best | 50.384 | 50.384 | 50.384 | 60.690 | 54.357 | 61.372 | 60.330 | 54.357 | 59.590 | 54.359 | 55.247 | 54.357 | 59.763 | 55.167 | 55.654 | 53.380 | ||
| Worst | 50.385 | 50.385 | 50.385 | 345.255 | 60.240 | 63.320 | 171.500 | 62.200 | 112.260 | 65.740 | 61.600 | 62.419 | 72.250 | 66.071 | 61.200 | 60.630 | ||
| Std. | 0.001 | 0.001 | 0.001 | - | - | - | - | 2.160 | - | 3.010 | - | 2.250 | - | 2.620 | 1.560 | 2.260 | ||
| Rank | 1 | 1 | 1 | 16 | 7 | 12 | 14 | 5 | 15 | 6 | 10 | 8 | 13 | 9 | 11 | 4 | ||
| 10 | Mean | 50.372 | 50.398 | 50.384 | 69.425 | 52.707 | 61.950 | 57.965 | 53.104 | 76.280 | 52.180 | 52.542 | 51.574 | 101.440 | 57.041 | 52.279 | 50.849 | |
| Best | 50.370 | 50.376 | 50.371 | 52.360 | 51.395 | 60.228 | 52.947 | 51.395 | 57.420 | 51.399 | 51.607 | 51.397 | 83.112 | 52.207 | 51.549 | 50.649 | ||
| Worst | 50.377 | 50.457 | 50.406 | 108.738 | 60.7244 | 68.190 | 76.820 | 56.736 | 123.460 | 56.710 | 60.110 | 53.786 | 119.250 | 68.622 | 56.165 | 53.330 | ||
| Std. | 0.003 | 0.024 | 0.013 | - | - | - | - | 2.600 | - | 2.370 | - | 1.730 | - | 2.250 | 1.430 | 1.870 | ||
| Rank | 1 | 3 | 2 | 14 | 9 | 13 | 12 | 10 | 15 | 6 | 8 | 5 | 16 | 11 | 7 | 4 | ||
| 15 | Mean | 50.402 | 50.570 | 50.591 | 63.601 | 51.231 | 60.260 | 59.526 | 52.278 | 71.860 | 52.822 | 52.188 | 50.897 | 128.250 | 58.340 | 51.891 | 51.516 | |
| Best | 50.378 | 50.424 | 50.425 | 53.075 | 50.609 | 58.530 | 52.557 | 50.611 | 58.255 | 50.617 | 50.871 | 50.612 | 107.223 | 52.097 | 50.807 | 50.452 | ||
| Worst | 50.438 | 51.219 | 50.789 | 85.745 | 60.192 | 61.000 | 90.370 | 62.580 | 103.860 | 94.276 | 57.447 | 53.832 | 189.200 | 87.320 | 61.800 | 55.460 | ||
| Std. | 0.022 | 0.193 | 0.100 | - | - | - | - | 3.730 | - | 4.250 | - | 1.340 | - | 4.010 | 2.450 | 1.490 | ||
| Rank | 1 | 2 | 3 | 14 | 5 | 13 | 12 | 9 | 15 | 10 | 8 | 4 | 16 | 11 | 7 | 6 | ||
| 20 | Mean | 50.457 | 50.925 | 52.181 | 63.630 | 50.760 | 66.220 | 61.88 | 52.722 | 70.190 | 53.733 | 53.090 | 50.700 | 185.430 | 58.248 | 53.167 | 52.398 | |
| Best | 50.395 | 50.495 | 50.866 | 52.395 | 50.467 | 60.445 | 54.723 | 50.510 | 60.232 | 50.463 | 50.825 | 50.455 | 130.152 | 52.464 | 50.846 | 50.657 | ||
| Worst | 50.595 | 51.271 | 54.672 | 83.706 | 53.742 | 67.180 | 78.200 | 64.570 | 81.450 | 78.914 | 59.180 | 52.028 | 337.300 | 78.160 | 68.950 | 59.850 | ||
| Std. | 0.057 | 0.196 | 0.994 | - | - | - | - | 3.710 | - | 7.580 | - | 1.020 | - | 6.950 | 3.990 | 1.560 | ||
| Rank | 1 | 4 | 5 | 13 | 2 | 14 | 12 | 7 | 15 | 10 | 8 | 2 | 16 | 11 | 9 | 6 | ||
| 25 | Mean | 51.031 | 51.678 | 54.690 | 64.901 | 50.709 | 61.570 | 64.780 | 54.408 | 72.780 | 53.904 | 53.781 | 50.999 | 257.720 | 60.263 | 54.157 | 54.587 | |
| Best | 50.472 | 50.790 | 51.911 | 55.017 | 50.448 | 61.549 | 55.528 | 50.551 | 63.369 | 50.491 | 51.242 | 50.457 | 159.740 | 53.738 | 51.239 | 50.782 | ||
| Worst | 52.156 | 57.314 | 57.530 | 74.926 | 53.519 | 62.070 | 80.330 | 69.660 | 83.910 | 66.452 | 60.398 | 53.704 | 699.600 | 78.139 | 65.700 | 63.160 | ||
| Std. | 0.516 | 1.503 | 1.618 | - | - | - | - | 4.120 | - | 8.660 | - | 0.810 | - | 7.550 | 4.060 | 2.380 | ||
| Rank | 3 | 4 | 10 | 14 | 1 | 12 | 13 | 8 | 15 | 6 | 5 | 2 | 16 | 11 | 7 | 9 | ||
| 30 | Mean | 51.602 | 51.789 | 59.805 | 66.616 | 51.106 | 63.950 | 67.870 | 59.988 | 74.780 | 54.962 | 55.008 | 51.357 | 395.540 | 62.385 | 54.521 | 56.891 | |
| Best | 50.673 | 50.997 | 54.527 | 57.247 | 50.467 | 63.230 | 56.607 | 50.898 | 65.725 | 50.683 | 51.921 | 50.516 | 230.150 | 53.299 | 51.617 | 51.019 | ||
| Worst | 53.083 | 61.565 | 64.940 | 80.084 | 60.285 | 64.710 | 78.580 | 74.120 | 91.300 | 65.976 | 62.718 | 58.336 | 2396 | 93.695 | 64.710 | 75.320 | ||
| Std. | 0.781 | 2.275 | 2.366 | - | - | - | - | 6.740 | - | 9.120 | - | 1.230 | - | 8.200 | 4.110 | 3.450 | ||
| Rank | 3 | 4 | 9 | 13 | 1 | 12 | 14 | 10 | 15 | 6 | 7 | 2 | 16 | 11 | 5 | 8 | ||
| 35 | Mean | 52.446 | 55.889 | 66.187 | 67.703 | 51.461 | 68.310 | 71.560 | 67.900 | 76.520 | 55.996 | 55.960 | 51.601 | 684.660 | 64.135 | 55.826 | 59.744 | |
| Best | 51.010 | 51.005 | 57.259 | 57.448 | 50.479 | 66.960 | 63.021 | 52.537 | 66.745 | 51.083 | 52.311 | 50.471 | 270.330 | 55.503 | 51.633 | 54.136 | ||
| Worst | 55.444 | 96.301 | 74.095 | 82.737 | 58.819 | 68.720 | 93.850 | 84.440 | 88.76 | 83.887 | 74.479 | 55.883 | 6362 | 82.833 | 67.610 | 71.450 | ||
| Std. | 1.191 | 12.249 | 4.298 | - | - | - | - | 9.150 | - | 9.550 | - | 1.650 | - | 8.650 | 4.120 | 4.010 | ||
| Rank | 3 | 5 | 10 | 11 | 1 | 13 | 14 | 12 | 15 | 7 | 6 | 2 | 16 | 9 | 4 | 8 | ||
| 40 | Mean | 53.365 | 55.994 | 75.595 | 69.973 | 51.876 | 74.580 | 74.850 | 77.620 | 80.260 | 57.856 | 57.493 | 52.198 | 1169 | 64.885 | 57.110 | 62.420 | |
| Best | 50.868 | 51.025 | 63.269 | 58.650 | 50.602 | 69.795 | 63.550 | 54.549 | 68.231 | 51.523 | 52.208 | 50.561 | 390.620 | 55.737 | 52.618 | 55.092 | ||
| Worst | 55.475 | 116.195 | 86.613 | 83.263 | 58.427 | 77.060 | 90.700 | 93.260 | 96.420 | 86.663 | 72.069 | 57.724 | 7103 | 84.730 | 67.870 | 72.650 | ||
| Std. | 1.482 | 16.188 | 5.356 | - | - | - | - | 10.900 | - | 10.430 | - | 2.380 | - | 9.410 | 4.550 | 4.540 | ||
| Rank | 3 | 4 | 13 | 10 | 1 | 11 | 12 | 14 | 15 | 7 | 6 | 2 | 16 | 9 | 5 | 8 | ||
| Average Rank | 2.000 | 3.375 | 6.625 | 13.125 | 3.375 | 12.500 | 12.875 | 9.375 | 15.000 | 7.250 | 7.250 | 3.375 | 15.625 | 10.250 | 6.875 | 6.625 | ||
| Overall Rank | 1 | 2 | 5 | 14 | 2 | 12 | 13 | 10 | 15 | 8 | 8 | 2 | 16 | 11 | 7 | 5 | ||
| ExtIPA vs. | IPA | ABC | BA | BAM | ACO |
|---|---|---|---|---|---|
| Z-val. | 2.417 | 2.417 | 2.660 | 0.197 | 2.660 |
| -val. | 0.015 | 0.015 | 0.007 | 0.843 | 0.007 |
| 0 | 0 | 0 | 16 | 0 | |
| 28 | 28 | 36 | 20 | 36 | |
| Sign. | ExtIPA | ExtIPA | ExtIPA | - | ExtIPA |
| ExtIPA vs. | BBO | DE | ES | FA | GA |
| Z-val. | 2.660 | 2.660 | 2.660 | 2.660 | 2.660 |
| -val. | 0.007 | 0.007 | 0.007 | 0.007 | 0.007 |
| 0 | 0 | 0 | 0 | 0 | |
| 36 | 36 | 36 | 36 | 36 | |
| Sign. | ExtIPA | ExtIPA | ExtIPA | ExtIPA | ExtIPA |
| ExtIPA vs. | MFA | PBIL | PSO | SGA | PGSO |
| Z-val. | 0.328 | 2.660 | 2.660 | 2.660 | 2.660 |
| -val. | 0.742 | 0.007 | 0.007 | 0.007 | 0.007 |
| 15 | 0 | 0 | 0 | 0 | |
| 21 | 36 | 36 | 36 | 36 | |
| Sign. | - | ExtIPA | ExtIPA | ExtIPA | ExtIPA |
| ExtIPA vs. | IPA | ABC | BA | BAM | ACO |
|---|---|---|---|---|---|
| Z-val. | 2.153 | 2.417 | 2.660 | 0.328 | 2.660 |
| -val. | 0.031 | 0.015 | 0.007 | 0.742 | 0.007 |
| 1 | 0 | 0 | 15 | 0 | |
| 27 | 28 | 36 | 21 | 36 | |
| Sign. | ExtIPA | ExtIPA | ExtIPA | - | ExtIPA |
| ExtIPA vs. | BBO | DE | ES | FA | GA |
| Z-val. | 2.660 | 2.660 | 2.660 | 2.660 | 2.660 |
| -val. | 0.007 | 0.007 | 0.007 | 0.007 | 0.007 |
| 0 | 0 | 0 | 0 | 0 | |
| 36 | 36 | 36 | 36 | 36 | |
| Sign. | ExtIPA | ExtIPA | ExtIPA | ExtIPA | ExtIPA |
| ExtIPA vs. | MFA | PBIL | PSO | SGA | PGSO |
| Z-val. | 0.328 | 2.660 | 2.660 | 2.660 | 2.660 |
| -val. | 0.742 | 0.007 | 0.007 | 0.007 | 0.007 |
| 15 | 0 | 0 | 0 | 0 | |
| 21 | 36 | 36 | 36 | 36 | |
| Sign. | - | ExtIPA | ExtIPA | ExtIPA | ExtIPA |
| ExtIPA vs. | IPA | ABC | BA | BAM | ACO |
|---|---|---|---|---|---|
| Z-val. | 2.153 | 2.417 | 2.660 | 0.328 | 2.660 |
| -val. | 0.031 | 0.015 | 0.007 | 0.742 | 0.007 |
| 1 | 0 | 0 | 15 | 0 | |
| 27 | 28 | 36 | 21 | 36 | |
| Sign. | ExtIPA | ExtIPA | ExtIPA | - | ExtIPA |
| ExtIPA vs. | BBO | DE | ES | FA | GA |
| Z-val. | 2.660 | 2.660 | 2.660 | 2.660 | 2.660 |
| -val. | 0.007 | 0.007 | 0.007 | 0.007 | 0.007 |
| 0 | 0 | 0 | 0 | 0 | |
| 36 | 36 | 36 | 36 | 36 | |
| Sign. | ExtIPA | ExtIPA | ExtIPA | ExtIPA | ExtIPA |
| ExtIPA vs. | MFA | PBIL | PSO | SGA | PGSO |
| Z-val. | 0.328 | 2.660 | 2.660 | 2.660 | 2.660 |
| p-val. | 0.742 | 0.007 | 0.007 | 0.007 | 0.007 |
| 15 | 0 | 0 | 0 | 0 | |
| 21 | 36 | 36 | 36 | 36 | |
| Sign. | - | ExtIPA | ExtIPA | ExtIPA | ExtIPA |
| D | ExtIPA | IPA | ABC | |
|---|---|---|---|---|
| 5 | 100.000 | 100.000 | 100.000 | |
| 103.920 | 217.454 | 210.474 | ||
| 10 | 100.000 | 100.000 | 100.000 | |
| 308.170 | 1324.990 | 850.474 | ||
| 15 | 100.000 | 100.000 | 100.000 | |
| 782.190 | 2049.330 | 2037.113 | ||
| 20 | 100.000 | 100.000 | 100.000 | |
| 1244.450 | 2609.247 | 3946.557 | ||
| 25 | 100.000 | 98.990 | 61.856 | |
| 1885.310 | 3889.194 | 5435.733 | ||
| 30 | 100.000 | 98.990 | 5.155 | |
| 2887.850 | 3904.888 | 5923.000 | ||
| 35 | 95.000 | 86.000 | 0.000 | |
| 3465.211 | 4305.440 | - | ||
| 40 | 90.000 | 90.000 | 0.000 | |
| 4147.200 | 4380.840 | - | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aslan, S.; Oktay, T. Path Planning of an Unmanned Combat Aerial Vehicle with an Extended-Treatment-Approach-Based Immune Plasma Algorithm. Aerospace 2023, 10, 487. https://doi.org/10.3390/aerospace10050487
Aslan S, Oktay T. Path Planning of an Unmanned Combat Aerial Vehicle with an Extended-Treatment-Approach-Based Immune Plasma Algorithm. Aerospace. 2023; 10(5):487. https://doi.org/10.3390/aerospace10050487
Chicago/Turabian StyleAslan, Selcuk, and Tugrul Oktay. 2023. "Path Planning of an Unmanned Combat Aerial Vehicle with an Extended-Treatment-Approach-Based Immune Plasma Algorithm" Aerospace 10, no. 5: 487. https://doi.org/10.3390/aerospace10050487