
Urban Growth Forecast Using Machine Learning Algorithms and GIS-Based Novel Techniques: A Case Study Focusing on Nasiriyah City, Southern Iraq
 , and
, and
Abstract
:1. Introduction
2. Driving Forces of Urban Growth
2.1. Neighbourhood Factors
2.2. Socioeconomic Factors
2.3. Natural Driving Factors
3. Materials and Methods
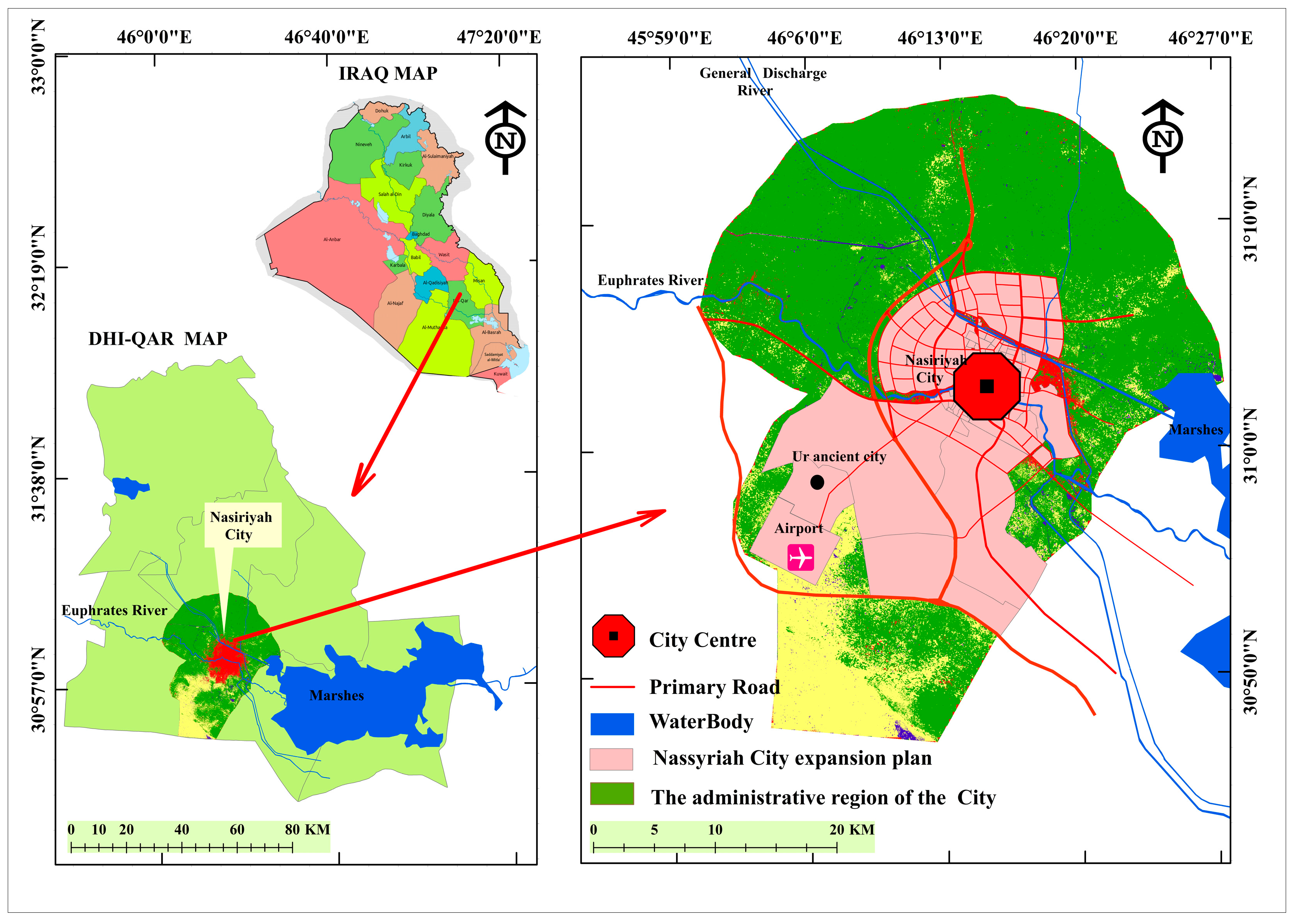
3.1. Study Area
3.2. RS and Data Collection
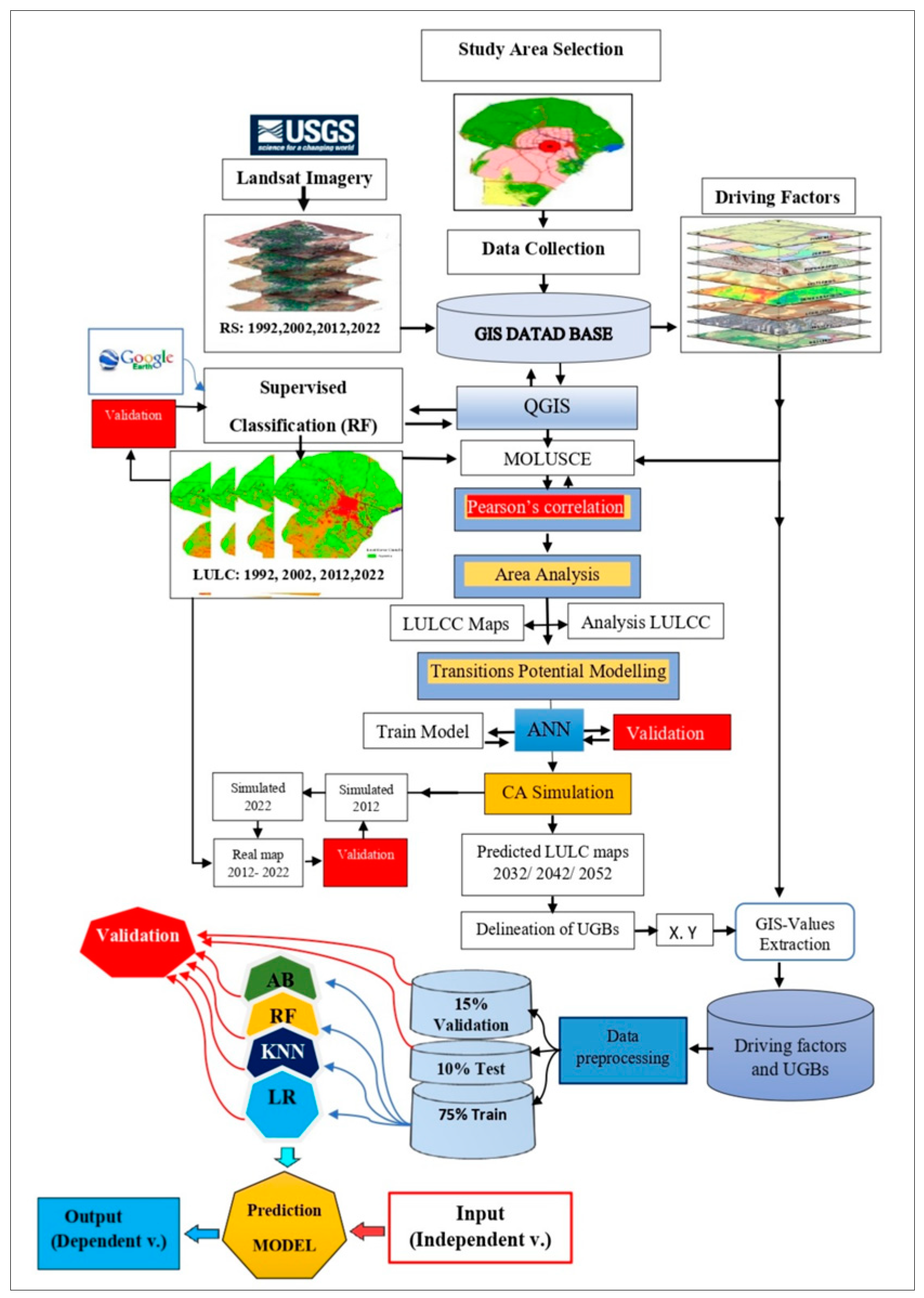
3.3. Method
3.3.1. GIS-Based Classification of Landsat Images Using RF
3.3.2. Applying the ANN-CA Technique to Predict Urban Growth
3.3.3. Structuring the Training ML Model
- 1.
- RF
- 2.
- KNN
- 3.
- AB
- 4.
- LR
3.3.4. Spatial Applicability of the Novel ML Model
3.4. Validation
4. Result and Analysis
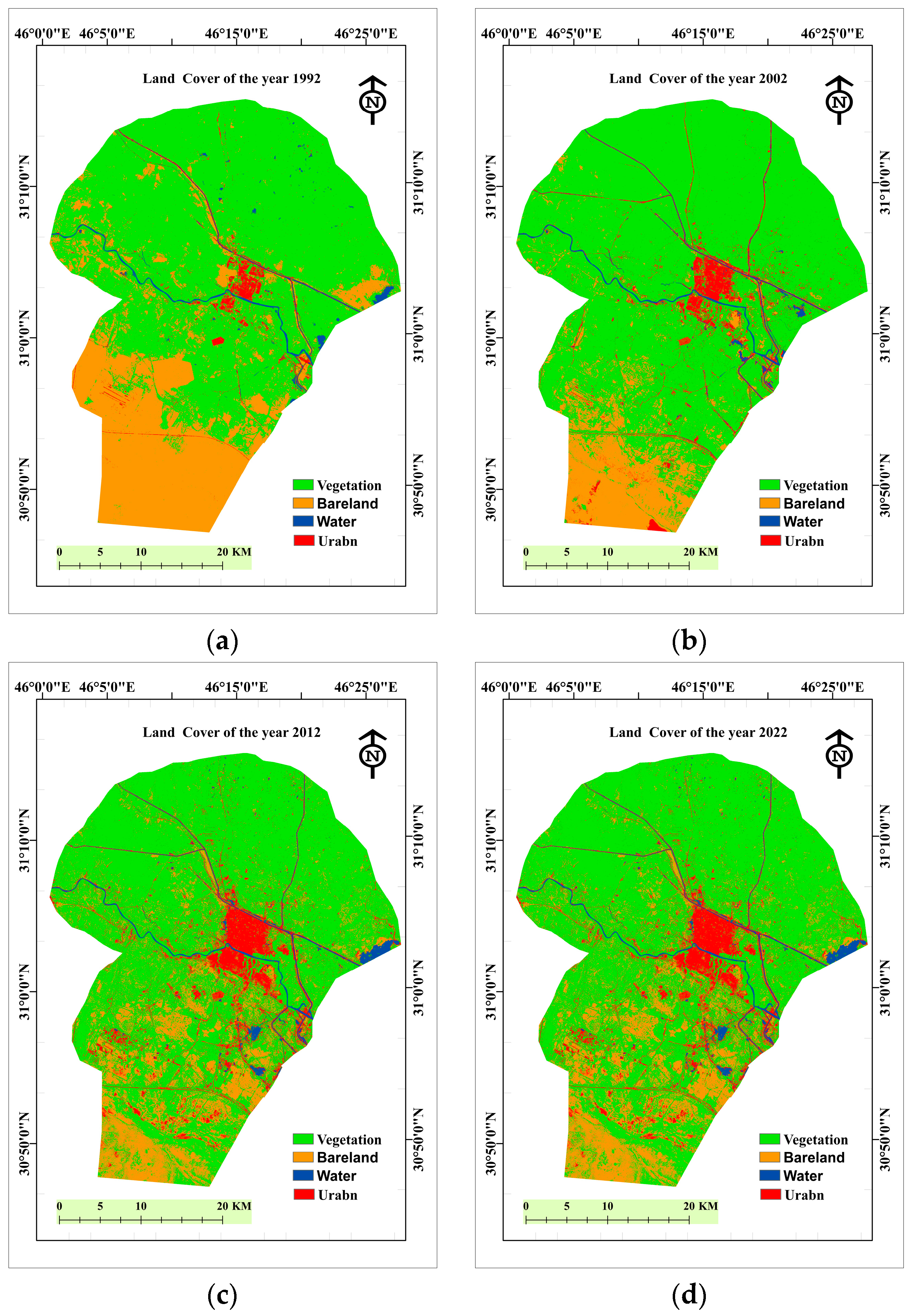
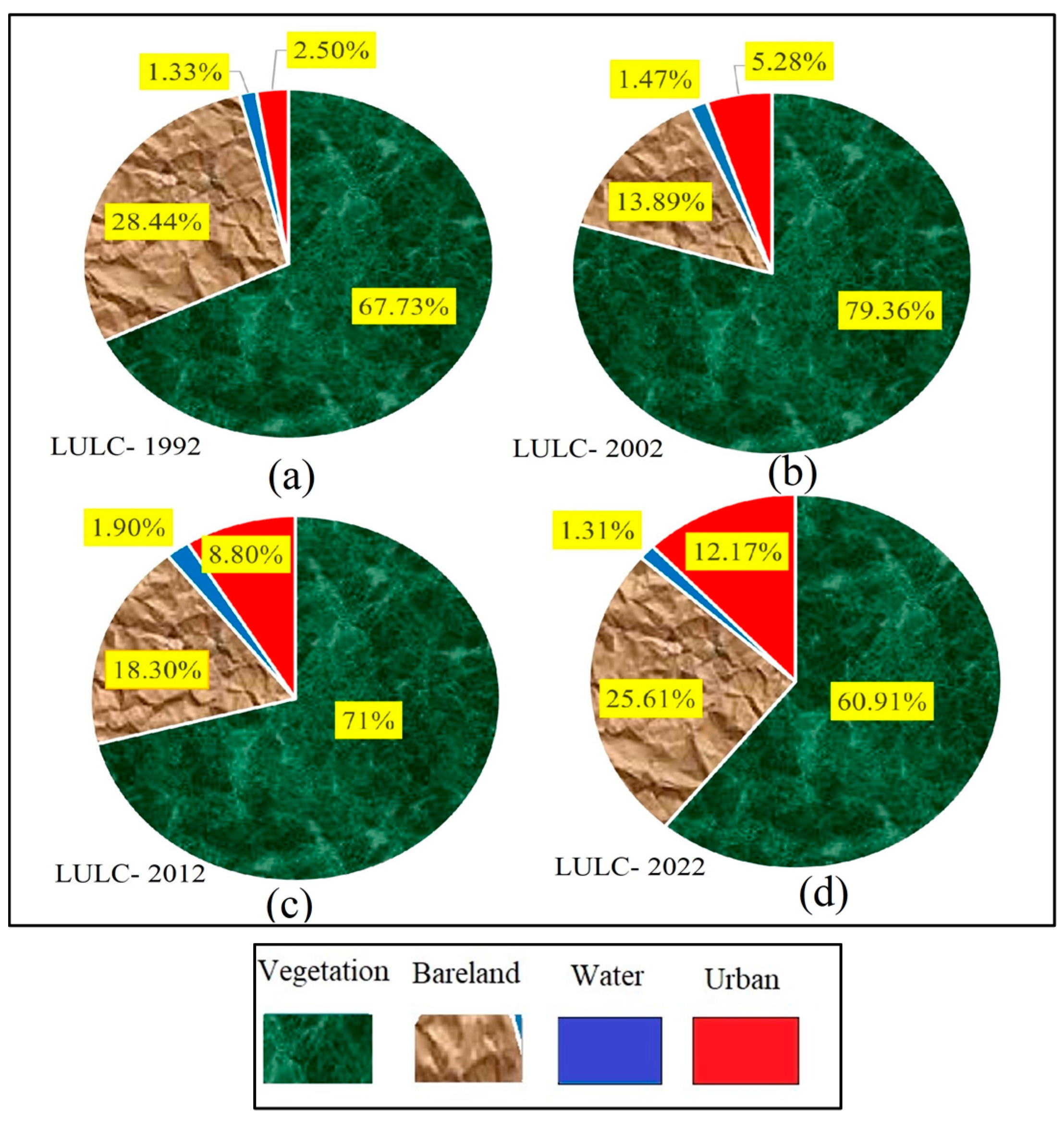
4.1. Classification of Landsat Image Results
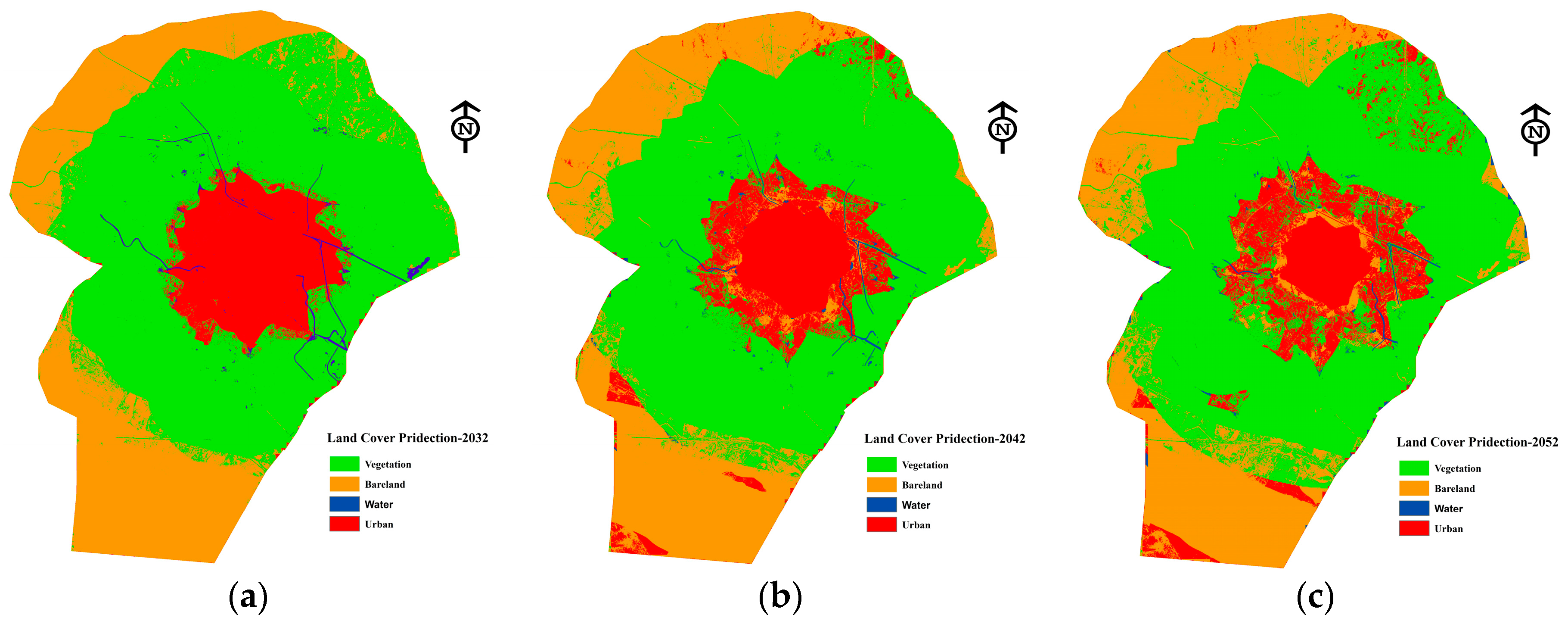
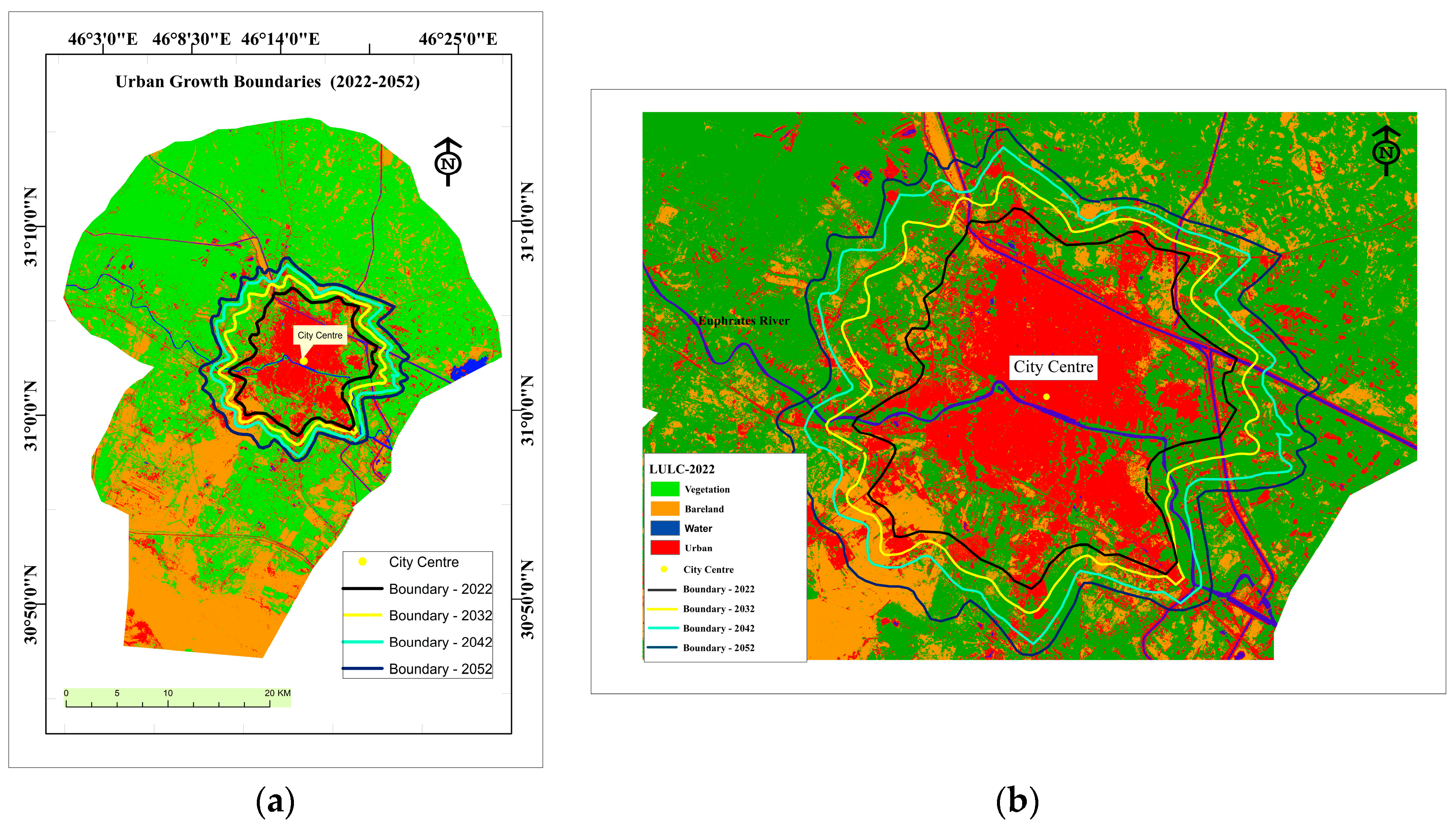
4.2. Prediction Result of Urban Growth
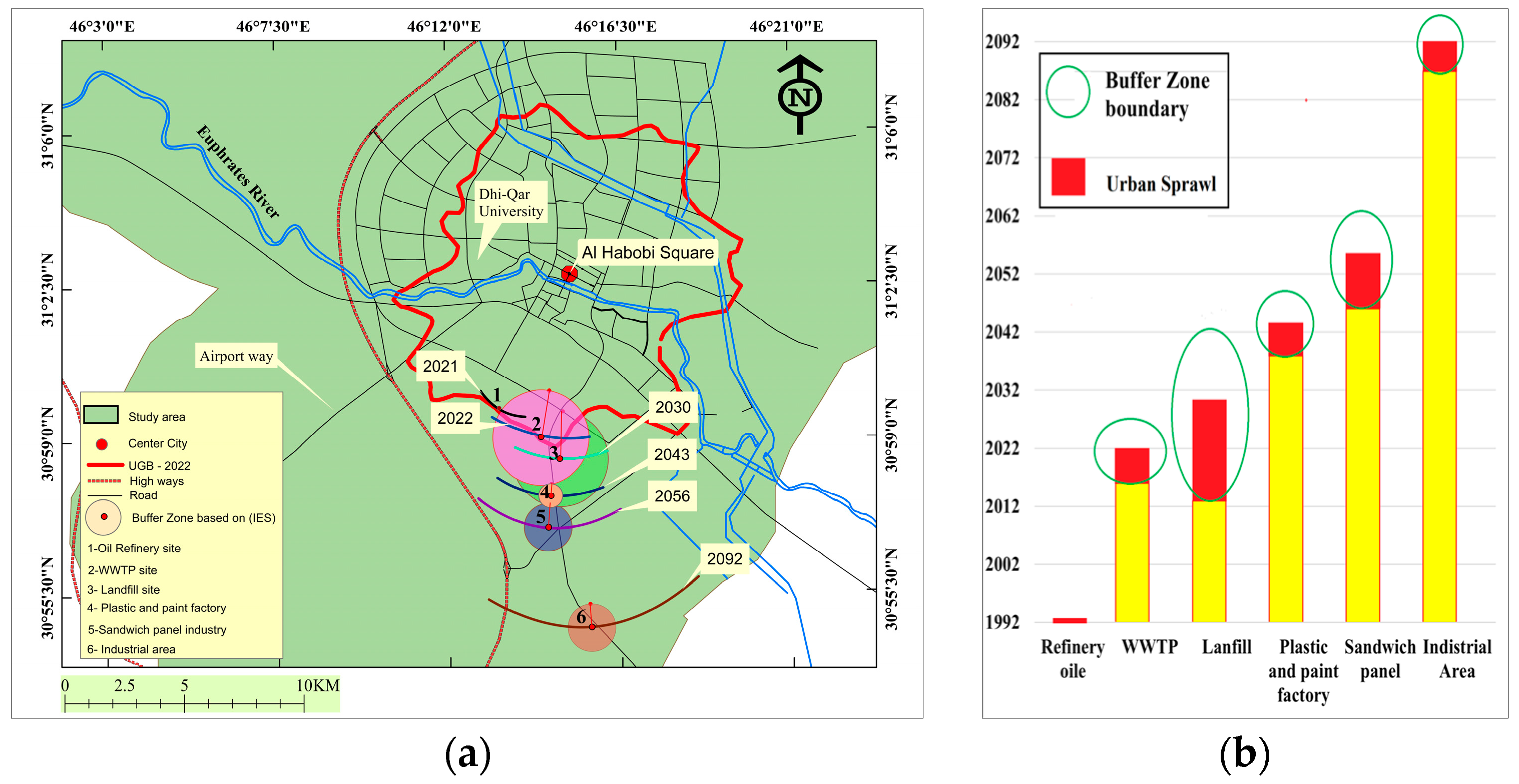
4.3. Result of the Spatial Applicability of the Novel ML Model
- 5.
- Project No. 1 (oil refinery)
- 6.
- Project No. 2 (WWTP)
- 7.
- Project No. 3 (landfill site)
- 8.
- Project No. 4 (plastic and paint factory)
- 9.
- Project No. 5 (sandwich panel factories)
- 10.
- Project No. 6 (industrial area)
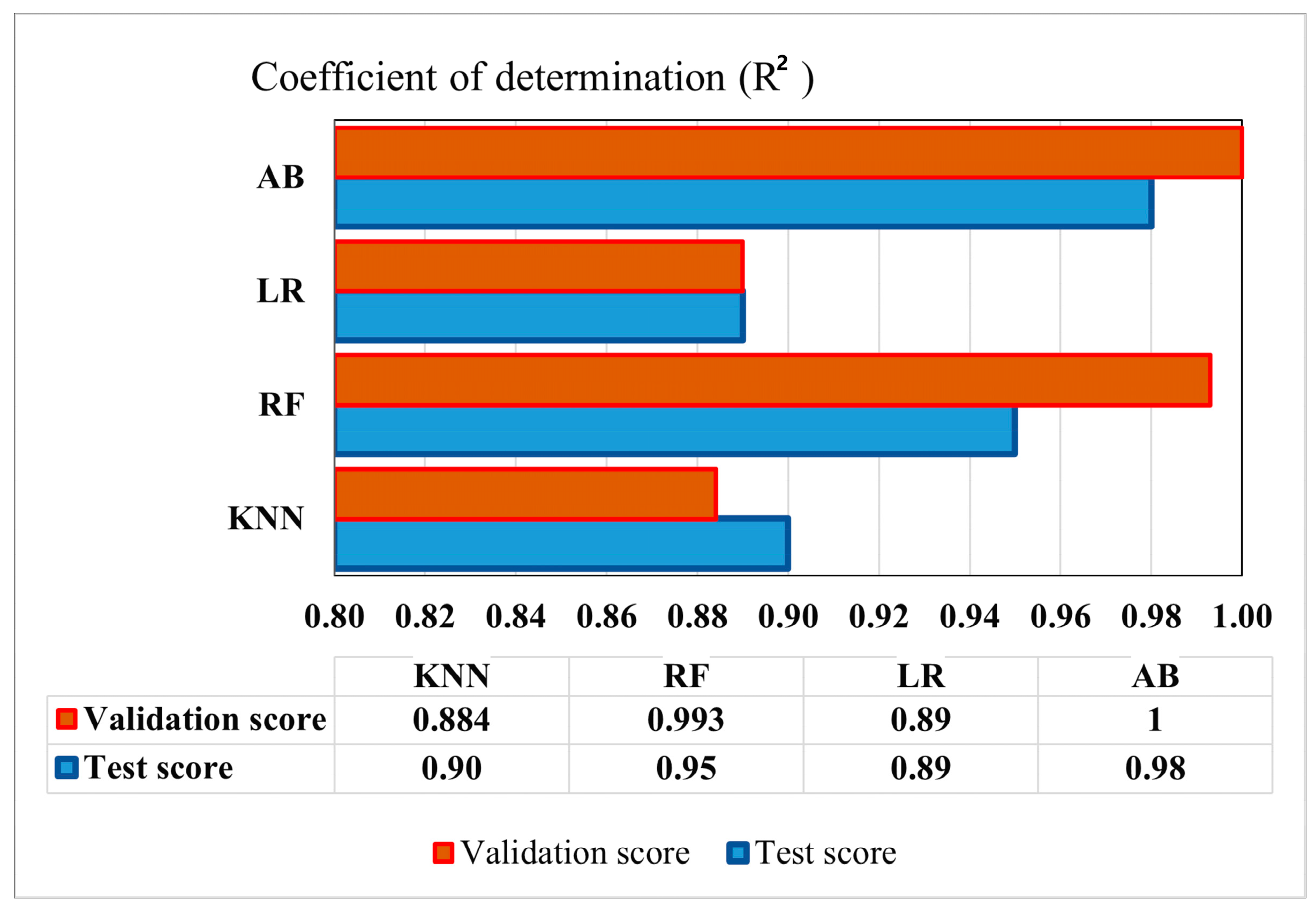
5. Validation Result
6. Discussion
7. Conclusions and Future Implications
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bseibsu, A.; Madhuranthakam, C.M.R.; Yetilmezsoy, K.; Almansoori, A.; Elkamel, A. Numerical Simulation of Dispersion Patterns and Air Emissions for Optimal Location of New Industries Accounting for Environmental Risks. Pollutants 2022, 2, 444–461. [Google Scholar] [CrossRef]
- Aniah, P.; Bawakyillenuo, S.; Codjoe, S.N.A.; Dzanku, F.M. Land use and land cover change detection and prediction based on CA-Markov chain in the savannah ecological zone of Ghana. Environ. Challenges 2023, 10, 100664. [Google Scholar] [CrossRef]
- Ghosh, S.; Das Chatterjee, N.; Dinda, S. Urban ecological security assessment and forecasting using integrated DEMATEL-ANP and CA-Markov models: A case study on Kolkata Metropolitan Area, India. Sustain. Cities Soc. 2021, 68, 102773. [Google Scholar] [CrossRef]
- Taherdoost, H.; Madanchian, M. Multi-Criteria Decision Making (MCDM) Methods and Concepts. Encyclopedia 2023, 3, 77–87. [Google Scholar] [CrossRef]
- Hanoon, S.K.; Abdullah, A.F.; Shafri, H.Z.M.; Wayayok, A. A Novel Approach Based on Machine Learning and Public Engagement to Predict Water-Scarcity Risk in Urban Areas. ISPRS Int. J. Geo-Inf. 2022, 11, 606. [Google Scholar] [CrossRef]
- Chen, Z.; Huang, M.; Zhu, D.; Altan, O. Integrating Remote Sensing and a Markov-FLUS Model to Simulate Future Land Use Changes in Hokkaido, Japan. Remote Sens. 2021, 13, 2621. [Google Scholar] [CrossRef]
- Tripathy, P.; Kumar, A. Monitoring and modelling spatio-temporal urban growth of Delhi using Cellular Automata and geoinformatics. Cities 2019, 90, 52–63. [Google Scholar] [CrossRef]
- Saha, T.K.; Pal, S.; Sarkar, R. Prediction of wetland area and depth using linear regression model and artificial neural network based cellular automata. Ecol. Inform. 2021, 62, 101272. [Google Scholar] [CrossRef]
- Kamaraj, M.; Rangarajan, S. Predicting the future land use and land cover changes for Bhavani basin, Tamil Nadu, India, using QGIS MOLUSCE plugin. Environ. Sci. Pollut. Res. 2022, 29, 86337–86348. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, H. Spatiotemporal dynamics and evolution relationships between land-use/land cover change and landscape pattern in response to rapid urban sprawl process: A case study in Wuhan, China. Ecol. Eng. 2022, 182, 106716. [Google Scholar] [CrossRef]
- Muhammad, R.; Zhang, W.; Abbas, Z.; Guo, F.; Gwiazdzinski, L. Spatiotemporal Change Analysis and Prediction of Future Land Use and Land Cover Changes Using QGIS MOLUSCE Plugin and Remote Sensing Big Data: A Case Study of Linyi, China. Land 2022, 11, 419. [Google Scholar] [CrossRef]
- Wang, P.; Huang, X.; Mango, J.; Zhang, D.; Xu, D.; Li, X. A Hybrid Population Distribution Prediction Approach Integrating LSTM and CA Models with Micro-Spatiotemporal Granularity: A Case Study of Chongming District, Shanghai. ISPRS Int. J. Geo-Inf. 2021, 10, 544. [Google Scholar] [CrossRef]
- Khan, A.; Sudheer, M. Machine learning-based monitoring and modeling for spatio-temporal urban growth of Islamabad. Egypt. J. Remote Sens. Space Sci. 2022, 25, 541–550. [Google Scholar] [CrossRef]
- Littidej, P.; Uttha, T.; Pumhirunroj, B. Spatial Predictive Modeling of the Burning of Sugarcane Plots in Northeast Thailand with Selection of Factor Sets Using a GWR Model and Machine Learning Based on an ANN-CA. Symmetry 2022, 14, 1989. [Google Scholar] [CrossRef]
- Lin, J.; Li, X.; Wen, Y.; He, P. Modeling urban land-use changes using a landscape-driven patch-based cellular automaton (LP-CA). Cities 2023, 132, 103906. [Google Scholar] [CrossRef]
- Mitsova, D.; Shuster, W.; Wang, X. A cellular automata model of land cover change to integrate urban growth with open space conservation. Landsc. Urban Plan. 2011, 99, 141–153. [Google Scholar] [CrossRef]
- Küçük Matcı, D.; Çömert, R.; Avdan, U. Analyzing and Predicting Spatiotemporal Urban Sprawl in Eskişehir Using Remote Sensing Data. J. Indian Soc. Remote Sens. 2022, 50, 923–936. [Google Scholar] [CrossRef]
- Mustafa, A.; Rienow, A.; Saadi, I.; Cools, M.; Teller, J. Comparing support vector machines with logistic regression for calibrating cellular automata land use change models. Eur. J. Remote Sens. 2018, 51, 391–401. [Google Scholar] [CrossRef]
- Xu, Q.; Wang, Q.; Liu, J.; Liang, H. Simulation of Land-Use Changes Using the Partitioned ANN-CA Model and Considering the Influence of Land-Use Change Frequency. ISPRS Int. J. Geo-Inf. 2021, 10, 346. [Google Scholar] [CrossRef]
- Pu, R. Mapping Tree Species Using Advanced Remote Sensing Technologies: A State-of-the-Art Review and Perspective. J. Remote Sens. 2021, 2021, 9812624. [Google Scholar] [CrossRef]
- Rimal, B.; Zhang, L.; Keshtkar, H.; Haack, B.N.; Rijal, S.; Zhang, P. Land Use/Land Cover Dynamics and Modeling of Urban Land Expansion by the Integration of Cellular Automata and Markov Chain. ISPRS Int. J. Geo-Inf. 2018, 7, 154. [Google Scholar] [CrossRef] [Green Version]
- Lai, Z.; Chen, C.; Chen, J.; Wu, Z.; Wang, F.; Li, S. Multi-Scenario Simulation of Land-Use Change and Delineation of Urban Growth Boundaries in County Area: A Case Study of Xinxing County, Guangdong Province. Land 2022, 11, 1598. [Google Scholar] [CrossRef]
- Liang, X.; Liu, X.; Li, X.; Chen, Y.; Tian, H.; Yao, Y. Delineating multi-scenario urban growth boundaries with a CA-based FLUS model and morphological method. Landsc. Urban Plan. 2018, 177, 47–63. [Google Scholar] [CrossRef]
- Jin, Y.; Li, A.; Bian, J.; Nan, X.; Lei, G. Modeling the Impact of Investment and National Planning Policies on Future Land Use Development: A Case Study for Myanmar. ISPRS Int. J. Geo-Inf. 2023, 12, 22. [Google Scholar] [CrossRef]
- Jin, M.; Feng, R.; Wang, L.; Yan, J. A Study of Diffusion Equation-Based Land-Use/Land-Cover Change Simulation. ISPRS Int. J. Geo-Inf. 2021, 10, 383. [Google Scholar] [CrossRef]
- Cui, J.; Zhu, M.; Liang, Y.; Qin, G.; Li, J.; Liu, Y. Land Use/Land Cover Change and Their Driving Factors in the Yellow River Basin of Shandong Province Based on Google Earth Engine from 2000 to 2020. ISPRS Int. J. Geo-Inf. 2022, 11, 163. [Google Scholar] [CrossRef]
- Navarro Cerrillo, R.M.; Rodríguez, G.P.; Rumbao, I.C.; Lara, M.Á.; Bonet, F.J.; Mesas-Carrascosa, F.J. Modeling major rural land-use changes using the gis-based cellular automata metronamica model: The case of andalusia (southern spain). ISPRS Int. J. Geo-Inf. 2020, 9, 458. [Google Scholar] [CrossRef]
- Megahed, Y.; Cabral, P.; Silva, J.; Caetano, M. Land Cover Mapping Analysis and Urban Growth Modelling Using Remote Sensing Techniques in Greater Cairo Region—Egypt. ISPRS Int. J. Geo-Inf. 2015, 4, 1750–1769. [Google Scholar] [CrossRef] [Green Version]
- Hanoon, S.K.; Abdullah, A.F.; Shafri, H.Z.M.; Wayayok, A. Using scenario modelling for adapting to urbanization and water scarcity: Towards a sustainable city in semi-arid areas. Period. Eng. Nat. Sci. (PEN) 2021, 10, 518–532. [Google Scholar] [CrossRef]
- Li, K.; Feng, M.; Biswas, A.; Su, H.; Niu, Y.; Cao, J. Driving Factors and Future Prediction of Land Use and Cover Change Based on Satellite Remote Sensing Data by the LCM Model: A Case Study from Gansu Province, China. Sensors 2020, 20, 2757. [Google Scholar] [CrossRef]
- Hu, Z.; Lo, C. Modeling urban growth in Atlanta using logistic regression. Comput. Environ. Urban Syst. 2007, 31, 667–688. [Google Scholar] [CrossRef]
- Wu, Q.; Li, H.-Q.; Wang, R.-S.; Paulussen, J.; He, Y.; Wang, M.; Wang, B.-H.; Wang, Z. Monitoring and predicting land use change in Beijing using remote sensing and GIS. Landsc. Urban Plan. 2006, 78, 322–333. [Google Scholar] [CrossRef]
- Mansour, S.; Alahmadi, M.; Atkinson, P.M.; Dewan, A. Forecasting of Built-Up Land Expansion in a Desert Urban Environment. Remote Sens. 2022, 14, 2037. [Google Scholar] [CrossRef]
- Traore, A.; Watanabe, T. Modeling Determinants of Urban Growth in Conakry, Guinea: A Spatial Logistic Approach. Urban Sci. 2017, 1, 12. [Google Scholar] [CrossRef] [Green Version]
- Yang, R.; Qin, B.; Lin, Y. Assessment of the Impact of Land Use Change on Spatial Differentiation of Landscape and Ecosystem Service Values in the Case of Study the Pearl River Delta in China. Land 2021, 10, 1219. [Google Scholar] [CrossRef]
- Past, A.; Land, F.; Land, U.; Kumar, P. Cellular Automata-Based Artificial Neural Network Model for Cover Dynamics. Agronomy 2022, 12, 2772. [Google Scholar]
- Ashwini, K.; Sil, B.S. Impacts of Land Use and Land Cover Changes on Land Surface Temperature over Cachar Region, Northeast India—A Case Study. Sustainability 2022, 14, 14087. [Google Scholar] [CrossRef]
- Liu, Y.; Feng, Y. Simulating the Impact of Economic and Environmental Strategies on Future Urban Growth Scenarios in Ningbo, China. Sustainability 2016, 8, 1045. [Google Scholar] [CrossRef] [Green Version]
- Zhang, D.; Liu, X.; Wu, X.; Yao, Y.; Wu, X.; Chen, Y. Multiple intra-urban land use simulations and driving factors analysis: A case study in Huicheng, China. GIScience Remote Sens. 2018, 56, 282–308. [Google Scholar] [CrossRef]
- Mengistu, T.D.; Chung, I.-M.; Kim, M.-G.; Chang, S.W.; Lee, J.E. Impacts and Implications of Land Use Land Cover Dynamics on Groundwater Recharge and Surface Runoff in East African Watershed. Water 2022, 14, 2068. [Google Scholar] [CrossRef]
- El-Tantawi, A.M.; Bao, A.; Chang, C.; Liu, Y. Monitoring and predicting land use/cover changes in the Aksu-Tarim River Basin, Xinjiang-China (1990–2030). Environ. Monit. Assess. 2019, 191, 1–18. [Google Scholar] [CrossRef]
- Hanoon, S.K.; Abdullah, A.F.; Shafri, H.Z.M.; Wayayok, A. Using Supervised Classification technique to monitor hydrological systems of Mesopotamia marshes in Dhi- Qar province (Iraq). In Proceedings of the IGARSS 2022-2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 6189–6192. [Google Scholar] [CrossRef]
- Padma, S.; Lakshmi, S.V.; Prakash, R.; Srividhya, S. imulation of Land Use/Land Cover Dynamics Using Google Earth Data and QGIS: A Case Study on Outer Ring Road, Southern India. Sustainability 2022, 14, 16373. [Google Scholar] [CrossRef]
- Dai, Y.; Wang, Y.; Leng, M.; Yang, X.; Zhou, Q. LOWESS smoothing and Random Forest based GRU model: A short-term photovoltaic power generation forecasting method. Energy 2022, 256, 124661. [Google Scholar] [CrossRef]
- Feng, T.; Wang, C.; Zhang, J.; Wang, B.; Jin, Y.-F. An improved artificial bee colony-random forest (IABC-RF) model for predicting the tunnel deformation due to an adjacent foundation pit excavation. Undergr. Space 2022, 7, 514–527. [Google Scholar] [CrossRef]
- Pan, Y.; Stark, R. An interpretable machine learning approach for engineering change management decision support in automotive industry. Comput. Ind. 2022, 138, 103633. [Google Scholar] [CrossRef]
- Yagoub, M.M.; Tesfaldet, Y.T.; Elmubarak, M.G.; Al Hosani, N. Extraction of Urban Quality of Life Indicators Using Remote Sensing and Machine Learning: The Case of Al Ain City, United Arab Emirates (UAE). ISPRS Int. J. Geo-Information 2022, 11, 458. [Google Scholar] [CrossRef]
- Virro, H.; Kmoch, A.; Vainu, M.; Uuemaa, E. Random forest-based modeling of stream nutrients at national level in a data-scarce region. Sci. Total. Environ. 2022, 840, 156613. [Google Scholar] [CrossRef]
- Niño-Adan, I.; Landa-Torres, I.; Portillo, E.; Manjarres, D. Influence of statistical feature normalisation methods on K-Nearest Neighbours and K-Means in the context of industry 4.0. Eng. Appl. Artif. Intell. 2022, 111, 104807. [Google Scholar] [CrossRef]
- Sun, X.; Opulencia, M.J.C.; Alexandrovich, T.P.; Khan, A.; Algarni, M.; Abdelrahman, A. Modeling and optimization of vegetable oil biodiesel production with heterogeneous nano catalytic process: Multi-layer perceptron, decision regression tree, and K-Nearest Neighbor methods. Environ. Technol. Innov. 2022, 27, 102794. [Google Scholar] [CrossRef]
- Gou, J.; Sun, L.; Du, L.; Ma, H.; Xiong, T.; Ou, W.; Zhan, Y. A representation coefficient-based k-nearest centroid neighbor classifier. Expert Syst. Appl. 2022, 194, 116529. [Google Scholar] [CrossRef]
- Chen, Y.; Dou, P.; Yang, X. Improving Land Use/Cover Classification with a Multiple Classifier System Using AdaBoost Integration Technique. Remote Sens. 2017, 9, 1055. [Google Scholar] [CrossRef] [Green Version]
- Khan, I.U.; Aslam, N.; AlShedayed, R.; AlFrayan, D.; AlEssa, R.; AlShuail, N.A.; Al Safwan, A. A Proactive Attack Detection for Heating, Ventilation, and Air Conditioning (HVAC) System Using Explainable Extreme Gradient Boosting Model (XGBoost). Sensors 2022, 22, 9235. [Google Scholar] [CrossRef]
- Atalan, A.; Şahin, H.; Atalan, Y.A. Integration of Machine Learning Algorithms and Discrete-Event Simulation for the Cost of Healthcare Resources. Healthcare 2022, 10, 1920. [Google Scholar] [CrossRef] [PubMed]
- Nhu, V.-H.; Mohammadi, A.; Shahabi, H.; Bin Ahmad, B.; Al-Ansari, N.; Shirzadi, A.; Clague, J.J.; Jaafari, A.; Chen, W.; Nguyen, H. Landslide Susceptibility Mapping Using Machine Learning Algorithms and Remote Sensing Data in a Tropical Environment. Int. J. Environ. Res. Public Health 2020, 17, 4933. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Chen, X.; Wang, Y.; Xu, X.; Zhang, M. Spatio-Temporal Characteristics and Influencing Factors of Urban Spatial Quality in Northeast China Based on DMSP-OLS and NPP-VIIRS Nighttime Light Data. Sustainability 2022, 14, 15668. [Google Scholar] [CrossRef]
- Pal, R.; Adhikari, D.; Heyat, M.M.B.; Guragai, B.; Lipari, V.; Ballester, J.B.; De la Torre Díez, I.; Abbas, Z.; Lai, D. A Novel Smart Belt for Anxiety Detection, Classification, and Reduction Using IIoMT on Students ’ Cardiac Signal and MSY. Bioengineering 2022, 9, 793. [Google Scholar] [CrossRef]
- Aslam, N.; Khan, I.U.; Mirza, S.; AlOwayed, A.; Anis, F.M.; Aljuaid, R.M.; Baageel, R. Interpretable Machine Learning Models for Malicious Domains Detection Using Explainable Artificial Intelligence (XAI). Sustainability 2022, 14, 7375. [Google Scholar] [CrossRef]
- Shi, G.-Y.; Zhou, Y.; Sang, Y.-Q.; Huang, H.; Zhang, J.-S.; Meng, P.; Cai, L.-L. Modeling the response of negative air ions to environmental factors using multiple linear regression and random forest. Ecol. Inform. 2021, 66, 101464. [Google Scholar] [CrossRef]
- Zakeri, Z.; Mansfield, N.; Sunderland, C.; Omurtag, A. Cross-validating models of continuous data from simulation and experiment by using linear regression and artificial neural networks. Inform. Med. Unlocked 2020, 21, 100457. [Google Scholar] [CrossRef]
- Raju, M.P.; Laxmi, A.J. IOT based Online Load Forecasting using Machine Learning Algorithms. Procedia Comput. Sci. 2020, 171, 551–560. [Google Scholar] [CrossRef]
- Hanoon, S.K.; Abdullah, A.F.; Shafri, H.Z.M.; Wayayok, A. Comprehensive Vulnerability Assessment of Urban Areas Using an Integration of Fuzzy Logic Functions: Case Study of Nasiriyah City in South Iraq. Earth 2022, 3, 699–732. [Google Scholar] [CrossRef]
- Basheer, S.; Wang, X.; Farooque, A.A.; Nawaz, R.A.; Liu, K.; Adekanmbi, T.; Liu, S. Comparison of Land Use Land Cover Classifiers Using Different Satellite Imagery and Machine Learning Techniques. Remote Sens. 2022, 14, 4978. [Google Scholar] [CrossRef]
- Almalki, A.; Gokaraju, B.; Mehta, N.; Doss, D.A. Geospatial and Machine Learning Regression Techniques for Analyzing Food Access Impact on Health Issues in Sustainable Communities. ISPRS Int. J. Geo-Inf. 2021, 10, 745. [Google Scholar] [CrossRef]
- Jaime, G.; Arroyo, P.; Cerrato, Á.; Hontañ, E.; Masa, S.; Menini, P.; Presmanes, L.; Alfonso, R.; Pinilla-Gil, E.; Lozano, J. Development and Field Validation of Low-Cost Metal Oxide Nanosensors for Tropospheric Ozone Monitoring in Rural Areas. Chemosensors 2022, 10, 478. [Google Scholar]
- Gonzalez, R.Q.; Arsanjani, J.J. Prediction of Groundwater Level Variations in a Changing Climate: A Danish Case Study. ISPRS Int. J. Geo-Inf. 2021, 10, 792. [Google Scholar] [CrossRef]
- Kim, S.W.; Lee, Y.G.; Tama, B.A.; Lee, S. Reliability-Enhanced Camera Lens Module Classification Using Semi-Supervised Regression Method. Appl. Sci. 2020, 10, 3832. [Google Scholar] [CrossRef]
- Ferretti, V. Framing territorial regeneration decisions: Purpose, perspective and scope. Land Use Policy 2021, 102, 105279. [Google Scholar] [CrossRef]
- Billaud, O.; Soubeyrand, M.; Luque, S.; Lenormand, M. Comprehensive decision-strategy space exploration for efficient territorial planning strategies. Comput. Environ. Urban Syst. 2020, 83, 101516. [Google Scholar] [CrossRef]
- Malakar, S. Geospatial modelling of COVID-19 vulnerability using an integrated fuzzy MCDM approach: A case study of West Bengal, India. Model. Earth Syst. Environ. 2021, 8, 3103–3116. [Google Scholar] [CrossRef]
- Diaz-Balteiro, L.; González-Pachón, J.; Romero, C. Measuring systems sustainability with multi-criteria methods: A critical review. Eur. J. Oper. Res. 2017, 258, 607–616. [Google Scholar] [CrossRef]
- Zolfaghary, P.; Zakerinia, M.; Kazemi, H. A model for the use of urban treated wastewater in agriculture using multiple criteria decision making (MCDM) and geographic information system (GIS). Agric. Water Manag. 2020, 243, 106490. [Google Scholar] [CrossRef]
- Parsian, S.; Amani, M.; Moghimi, A.; Ghorbanian, A.; Mahdavi, S. Flood Hazard Mapping Using Fuzzy Logic, Analytical Hierarchy Process, and Multi-Source Geospatial Datasets. Remote Sens. 2021, 13, 4761. [Google Scholar] [CrossRef]
- Alwan, I.A.; Aziz, N.A.; Hamoodi, M.N. Potential Water Harvesting Sites Identification Using Spatial Multi-Criteria Evaluation in Maysan Province, Iraq. ISPRS Int. J. Geo-Inf. 2020, 9, 235. [Google Scholar] [CrossRef] [Green Version]
- Khosravi, K.; Shahabi, H.; Pham, B.T.; Adamowski, J.; Shirzadi, A.; Pradhan, B.; Dou, J.; Ly, H.-B.; Gróf, G.; Ho, H.L.; et al. A comparative assessment of flood susceptibility modeling using Multi-Criteria Decision-Making Analysis and Machine Learning Methods. J. Hydrol. 2019, 573, 311–323. [Google Scholar] [CrossRef]
- Sachit, M.S.; Shafri, H.Z.M.; Abdullah, A.F.; Rafie, A.S.M.; Gibril, M.B.A. Global Spatial Suitability Mapping of Wind and Solar Systems Using an Explainable AI-Based Approach. ISPRS Int. J. Geo-Inf. 2022, 11, 422. [Google Scholar] [CrossRef]
- Al-Ruzouq, R.; Shanableh, A.; Yilmaz, A.G.; Idris, A.; Mukherjee, S.; Khalil, M.A.; Gibril, M.B.A. Dam Site Suitability Mapping and Analysis Using an Integrated GIS and Machine Learning Approach. Water 2019, 11, 1880. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Peng, H.; Hu, Q.; Jiang, M. Analysis of runoff generation driving factors based on hydrological model and interpretable machine learning method. J. Hydrol. Reg. Stud. 2022, 42, 101139. [Google Scholar] [CrossRef]
- Almansi, K.Y.; Rashid, A.; Shariff, M.; Abdullah, A.F. Hospital Site Suitability Assessment Using Three Machine Learning Approaches: Evidence from the Gaza Strip in Palestine. Appl. Sci. 2021, 11, 11054. [Google Scholar] [CrossRef]
- Li, W.; Shi, Y.; Huang, F.; Hong, H.; Song, G. Uncertainties of Collapse Susceptibility Prediction Based on Remote Sensing and GIS: Effects of Different Machine Learning Models. Front. Earth Sci. 2021, 9, 731058. [Google Scholar] [CrossRef]
- Ademulegun, O.O.; MacArtain, P.; Oni, B.; Hewitt, N.J. Multi-Stage Multi-Criteria Decision Analysis for Siting Electric Vehicle Charging Stations within and across Border Regions. Energies 2022, 15, 9396. [Google Scholar] [CrossRef]
- Rahman, M.; Szabó, G. Sustainable Urban Land-Use Optimization Using GIS-Based Multicriteria Decision-Making (GIS-MCDM) Approach. ISPRS Int. J. Geo-Inf. 2022, 11, 313. [Google Scholar] [CrossRef]
- Caprioli, C.; Bottero, M. Addressing complex challenges in transformations and planning: A fuzzy spatial multicriteria analysis for identifying suitable locations for urban infrastructures. Land Use Policy 2020, 102, 105147. [Google Scholar] [CrossRef]
- Liu, B.-L.; Li, G.; Yang, C.-X.; Ma, J.; Zhao, Y.; Yu, S.-P.; Dong, J.; Guo, H. Spatial Suitability Evaluation of Livestock and Poultry Breeding: A Case Study in Wangkui County, Heilongjiang Province, China. Sustainability 2022, 14, 7464. [Google Scholar] [CrossRef]
- Aghmashhadi, A.H.; Azizi, A.; Hoseinkhani, M.; Zahedi, S.; Cirella, G.T. Aquaculture Site Selection of Oncorhynchus Mykiss (Rainbow Trout) in Markazi Province Using GIS-Based MCDM. ISPRS Int. J. Geo-Inf. 2022, 11, 157. [Google Scholar] [CrossRef]
- George, S.L.; Kantamaneni, K.; Rasme Allat, V.; Prasad, K.A.; Shekhar, S.; Panneer, S.; Rice, L.; Balasubramani, K. A Multi-Data Geospatial Approach for Understanding Flood Risk in the Coastal Plains of Tamil Nadu. India. Earth 2022, 3, 383–400. [Google Scholar] [CrossRef]
- Assumma, V.; Bottero, M.; De Angelis, E.; Lourenço, J.M.; Monaco, R.; Soares, A.J. A decision support system for territorial resilience assessment and planning: An application to the Douro Valley (Portugal). Sci. Total. Environ. 2020, 756, 143806. [Google Scholar] [CrossRef]
- Liu, X.; Shi, W.; Zhang, S. Progress of Research on Urban Growth Boundary and Its Implications in Chinese Studies Based on Bibliometric Analysis. Int. J. Environ. Res. Public Health 2022, 19, 16644. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronym | Full Name | Acronym | Full Name |
|---|---|---|---|
| LULCC | Land use–land cover change | DST | Decision support tool |
| GIS | Geographic information system | PCC | Proximity to urban centre |
| RS | Remote sensing | PWP | Proximity to water pipelines |
| MCDM | Multicriteria decision making | PSN | Proximity to sewage networks |
| ML | Machine learning | PMR | Proximity to main roads |
| CA | Cellular automata | PD | Population density |
| MC | Markov chain | GDP | Gross domestic product |
| ANN | Artificial neural network | PR | Proximity to the river |
| RF | Random forest | S | Slope |
| AI | Artificial intelligence | DEM | Elevation |
| LR | Logistic regression | SCP | Semi-automatic classification plugin |
| UGBs | Urban growth boundary(s) | IES | Iraqi environment standards |
| KNN | K-nearest neighbour | WWTPs | Wastewater treatment plant(s) |
| AB | AdaBoost | R2 | Coefficient of determination |
| OC | Overall accuracy |
| Data | Satellite and Sensor | Acquisition Date | Stripe | Resolution | Sources |
|---|---|---|---|---|---|
| Remote sensing images | Landsat 5 (LT05 TM) | 13 October 1992 | 167/039 | 30 m | USGS (https://earthexplorer.usgs.gov, (accessed on 6 November 2022)) |
| Landsat 5 (LT05 TM) | 13 October 1992 | 167/038 | 30 m | ||
| Landsat 7 (LE07 ETM) | 1 October 2002 | 167/039 | (15–30) m | ||
| Landsat 7 (LE07 ETM) | 1 October 2002 | 167/038 | (15–30) m | ||
| Landsat 7 (LE07 ETM) | 12 October 2012 | 167/039 | (15–30) m | ||
| Landsat 7 (LE07 ETM) | 12 October 2012 | 167/038 | (15–30) m | ||
| Landsat 9 (LC09-OLI_TIRS) | 8 October 2022 | 167/039 | (15–30) m | ||
| Landsat 9 (LC09-OLI_TIRS) | 8 October 2022 | 167/038 | (15–30) m | ||
| DEM | EntityID: SRTM1N31E045V3 | 11 February 2000 | (30°–31°) N and (45°–46°) E | 1-ARC | |
| Data | Format and accuracy | Date | Purpose of data | Sources | |
| Road network | Vector (2 m) | 1992, 2002, 2012, 2022 | Generate the raster of PMR | Nasiriyah City, Iraq | |
| River network | Vector (5 m) | 1992, 2002, 2012, 2022 | Shapefile was utilised to produce the raster of PR | Ministry of Irrigation/Dhi-Qar, Iraq | |
| Water pipeline | Vector (2 m) | 1992, 2002, 2012, 2022 | Extract the raster of PWP | Dhi-Qar Water Directorate | |
| Sewage pipeline | Vector (2 m) | 1992, 2002, 2012, 2022 | Shapefile was utilised to extract the raster of PSN | Sewage Department Office in Dhi-Qar, Iraq | |
| Population | CSV | 1992, 2002, 2012, 2022 | Generate the raster of PD | Department of Statistics inMinistry of Planning | |
| GDP | CSV | 1992, 2002, 2012, 2022 | Generate the raster of GDP | Department of Statistics inMinistry of Planning | |
| Auxiliary information (master plan for Nasiriyah City) | Vector, Raster (2 m) | 2016, 2021 | Validate the LULC classification and identify city expansion and street, central city and neighbourhoods | Nasiriyah City’s Department of Urban Planning, Iraq | |
| Coordinates for several factories | CSV (5 m) | 29 September 2022 | Input data to predict UGBs | Dhi-Qar Environment Office (Iraq) | |
| Project Types | Radius of Buffer Zone (km) |
|---|---|
| Oil refinery | 10 |
| Landfill | 2 |
| WWTPs | 2 |
| Plastic and paint plant | 0.5 |
| Sandwich panel industry | 1 |
| Industrial area | 1 |
| Years | Overall Accuracy of the Training Model [%] | Kappa of the Training Model | Overall Accuracy of Classification [%] | Kappa Classification | Kappa of Simulation Maps |
|---|---|---|---|---|---|
| 1992 | 99.64 | 0.993 | 99.94 | 0.999 | / |
| 2002 | 94.07 | 0.902 | 96.3127 | 0.9307 | / |
| 2012 | 89.99 | 0.844 | 93.2061 | 0.8838 | 0.903 |
| 2022 | 93.77 | 0.880 | 97.7284 | 0.9617 | 0.802 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hanoon, S.K.; Abdullah, A.F.; Shafri, H.Z.M.; Wayayok, A. Urban Growth Forecast Using Machine Learning Algorithms and GIS-Based Novel Techniques: A Case Study Focusing on Nasiriyah City, Southern Iraq. ISPRS Int. J. Geo-Inf. 2023, 12, 76. https://doi.org/10.3390/ijgi12020076
Hanoon SK, Abdullah AF, Shafri HZM, Wayayok A. Urban Growth Forecast Using Machine Learning Algorithms and GIS-Based Novel Techniques: A Case Study Focusing on Nasiriyah City, Southern Iraq. ISPRS International Journal of Geo-Information. 2023; 12(2):76. https://doi.org/10.3390/ijgi12020076
Chicago/Turabian StyleHanoon, Sadeq Khaleefah, Ahmad Fikri Abdullah, Helmi Z. M. Shafri, and Aimrun Wayayok. 2023. "Urban Growth Forecast Using Machine Learning Algorithms and GIS-Based Novel Techniques: A Case Study Focusing on Nasiriyah City, Southern Iraq" ISPRS International Journal of Geo-Information 12, no. 2: 76. https://doi.org/10.3390/ijgi12020076