
A Measurement Compensation Method for Electrical Capacitance Tomography Sensors with Inhomogeneous Electrode Parameters
Abstract
:1. Introduction
2. Analysis of the Source of Geometric Inhomogeneity of ECT Sensor
2.1. Flexible Circuit (FPC) Process
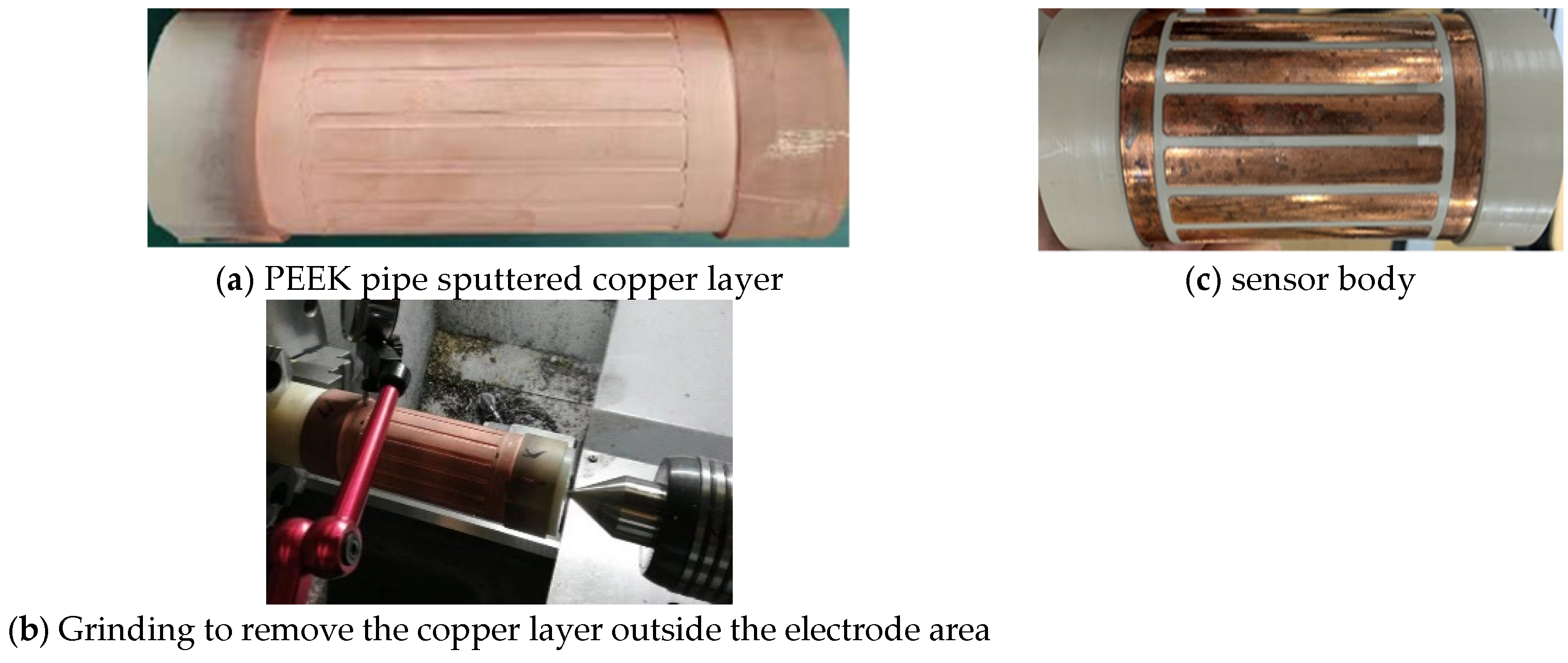
2.2. Sputtering Process
3. Measured Value Compensation of ECT Sensor Based on the Assumption of Invariant Geometric Factor
3.1. ECT Sensor Measurement Value Representation
3.2. ECT Sensor Measurement Value Compensation
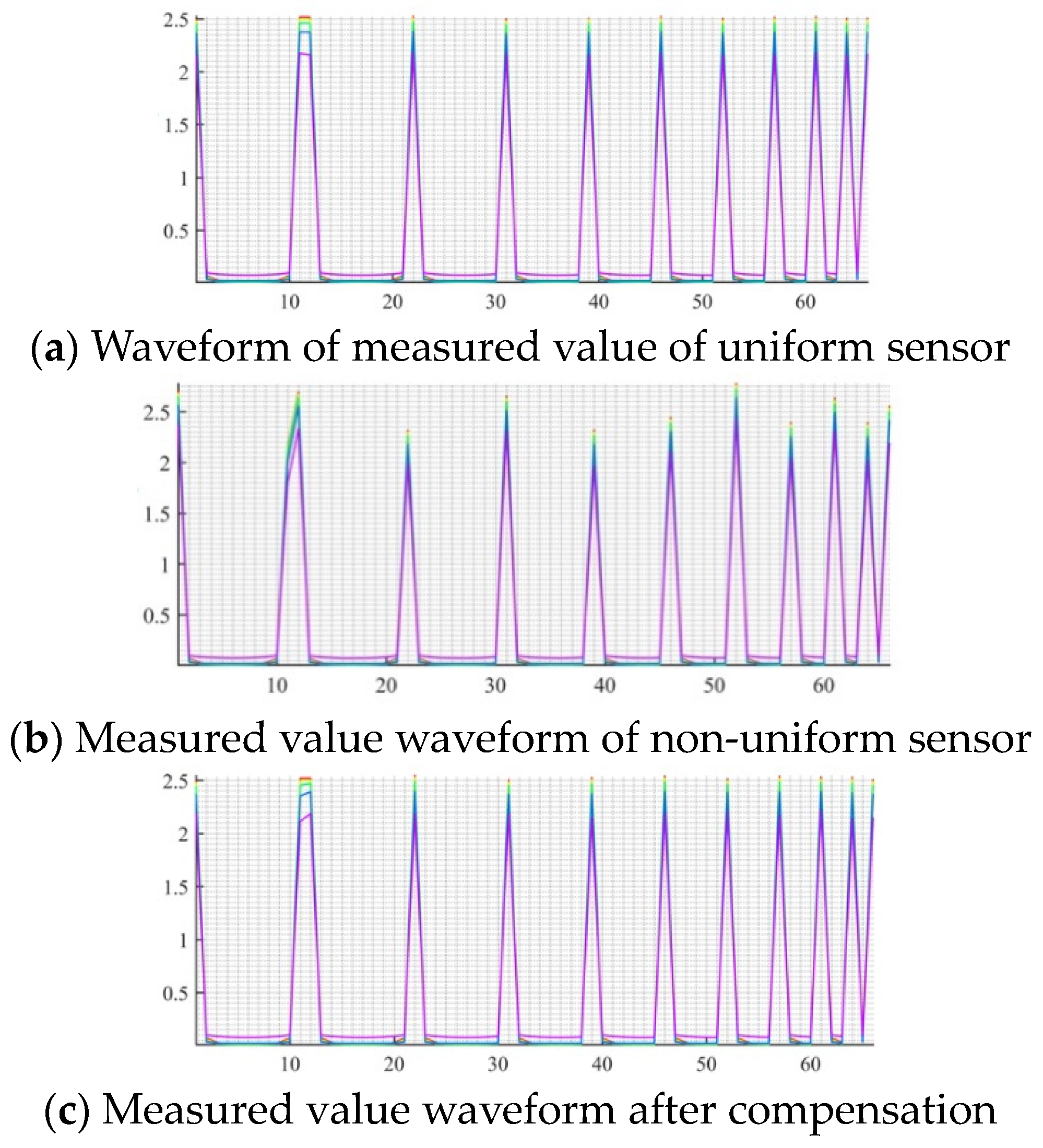
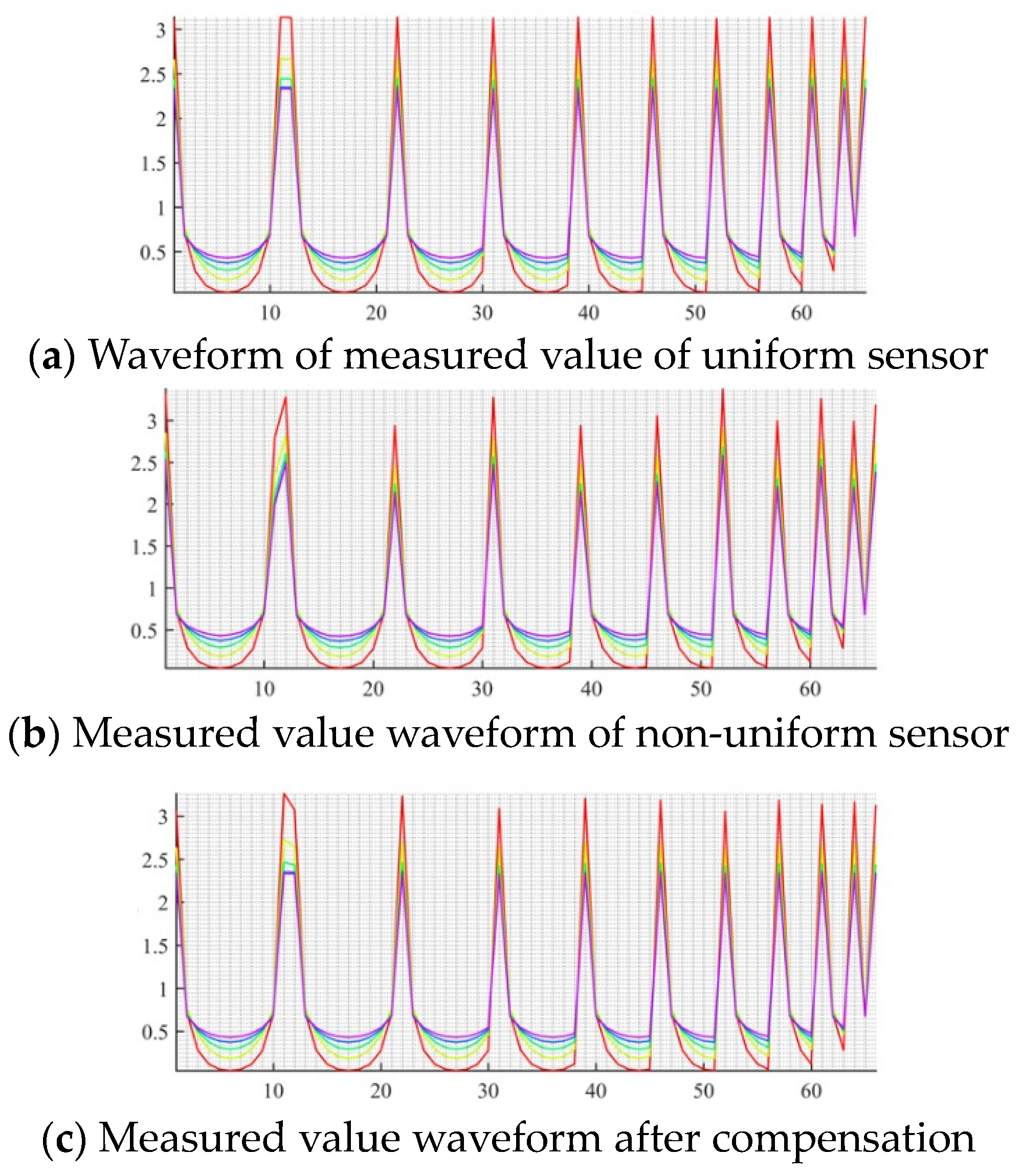
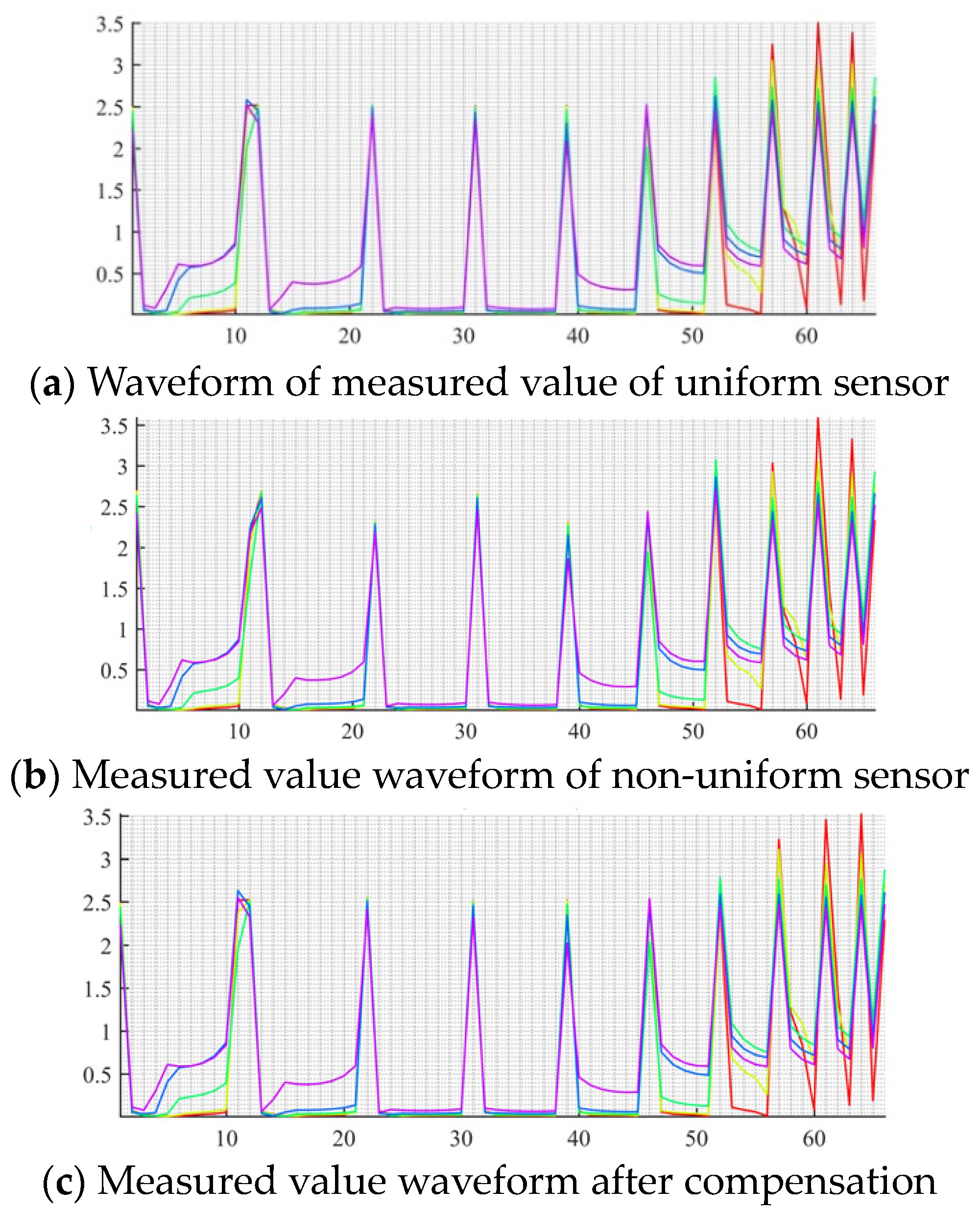
4. Simulation Experiment Verification
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chen, F. External analysis of energy and environment problems. Acad. Forum 2013, 36, 146–151. [Google Scholar]
- Tan, C.; Dong, F. Review of multiphase flow process parameter detection technology. Acta Autom. Sin. 2013, 39, 1923–1932. [Google Scholar] [CrossRef]
- Fuchs, A.; Zangl, H.; Wypych, P. Signal modelling and algorithms for parameter estimation in pneumatic conveying. Powder Technol. 2007, 173, 126–139. [Google Scholar] [CrossRef]
- Ismail, I.; Shafquet, A.; Karsiti, M.N. Application of electrical capacitance tomography and differential pressure measurement in an air-water bubble column for online analysis of void fraction. In Proceedings of the 2011 Fourth International Conference on Modeling, Simulation and Applied Optimization, Kuala Lumpur, Malaysia, 19–21 April 2011; pp. 1–6. [Google Scholar]
- Niu, G.; Jia, Z.; Wang, J. Void Fraction Measurement in Oil-Gas Transportation Pipeline Using an Improved Electrical Capacitance Tomography System. Chin. J. Chem. Eng. 2004, 12, 476–481. [Google Scholar]
- Shafquet, A.; Ismail, I. Measurement of void fraction by using electrical capacitance sensor and differential pressure in air-water bubble flow. In Proceedings of the 2012 4th International Conference on Intelligent and Advanced Systems (ICIAS2012), Kuala Lumpur, Malaysia, 12–14 June 2012; pp. 576–581. [Google Scholar]
- Beck, M.S. Correlation in instruments-Cross correlation flowmeters. J. Phys. E Sci. Instrum. 2000, 14, 7–19. [Google Scholar] [CrossRef]
- Ye, J.; Yang, W. Evaluation of Electrical Capacitance Tomography Sensors for Concentric Annulus. Sens. J. IEEE 2013, 13, 446–456. [Google Scholar] [CrossRef]
- Yang, W. Design of electrical capacitance tomography sensors. Meas. Sci. Technol. 2010, 21, 447–453. [Google Scholar] [CrossRef]
- Yang, W. Key issues in designing capacitance tomography sensors. In Proceedings of the Sensors, 2006, Daegu, Korea, 22–25 October 2006; IEEE: Piscataway, NJ, USA. [Google Scholar]
- Zhang, L.; Wang, H.X. An iterative thresholding algorithm for the inverse problem of electrical resistance tomography. Flow Meas. Instrum. 2013, 33, 244–250. [Google Scholar] [CrossRef]
- Cao, Z.; Wan, H.X. Optimization design of solid concentration capacitive sensor for gas-solid two-phase flow. Chin. J. Sci. Instrum. 2007, 28, 1956–1959. [Google Scholar]
- Guo, S.; Li, X.; He, W. Gas and Solid Two Phase Flow Multi-parameter Measuring System Based on Capacitance Sensors of Double Array. Instrum. Tech. Sensor 2018, 4, 95–97. [Google Scholar]
- Wang, H.G.; Yang, W.Q. Measurement of fluidised bed dryer by different frequency and different normalisation methods with electrical capacitance tomography. Powder Technol. 2010, 199, 60–69. [Google Scholar] [CrossRef]
- Wang, H.X. Electrical Tomography; Science Press: Beijing, China, 2013. [Google Scholar]
- Liu, S.; Lei, J.; Wang, X.Y.; Liu, Q.B. Generalized multi-scale dynamic inversion algorithm for electrical capacitance tomography. Flow Meas. Instrum. 2013, 31, 35–46. [Google Scholar] [CrossRef]
- Huang, Z.Y.; Zhao, Y.; Wang, B.L.; Li, H.Q. Two phase flow pattern visualization system for electrical capacitance tomography. Chin. J. Sci. Instrum. 2001, 22, 458–461. [Google Scholar]
- Li, K.; Wang, B.; Huang, Z.; Ji, H.; Li, H. Application of K-means clustering in flow pattern identification of CCERT system. J. Beijing Univ. Aeronaut. Astronaut. 2017, 043, 2280–2285. [Google Scholar]
- Zhang, J.; Hu, H.; Dong, J.; Yan, Y. Concentration measurement of biomass/coal/air three-phase flow by integrating electrostatic and capacitive sensors. Flow Meas. Instrum. 2012, 24, 43–49. [Google Scholar] [CrossRef]
- Wang, X.; Hu, H.; Zhang, A. Concentration measurement of three-phase flow based on multi-sensor data fusion using adaptive fuzzy inference system. Flow Meas. Instrum. 2014, 39, 1–8. [Google Scholar] [CrossRef]
- Wang, X.; Hu, H.; Liu, X. Multisensor Data Fusion Techniques With ELM for Pulverized-Fuel Flow Concentration Measurement in Cofired Power Plant. IEEE Trans. Instrum. Meas. 2015, 64, 2769–2780. [Google Scholar] [CrossRef]
- Thorn, R.; Johansen, G.A.; Hjertaker, B.T. Three-phase flow measurement in the petroleum industry. Meas. Sci. Technol. 2012, 24, 012003. [Google Scholar] [CrossRef]
- Luo, Q.; Zhao, Y.F.; Ye, M.; Liu, Z.M. Application of electrical capacitance tomography in gas-solid fluidized bed measurement. CIESC J. 2014, 65, 2504–2512. [Google Scholar]
- Wang, H.; Yang, W. Scale-up of an electrical capacitance tomography sensor for imaging pharmaceutical fluidized beds and validation by computational fluid dynamics. Meas. Sci. Technol. 2011, 22, 104015. [Google Scholar] [CrossRef]
- Zhang, W.; Cheng, Y.; Wang, C.; Yang, W.; Wang, C.-H. Investigation on hydrodynamics of triple-bed combined circulating fluidized bed using electrostatic sensor and electrical capacitance tomography. Ind. Eng. Chem. Res. 2013, 52, 11198–11207. [Google Scholar] [CrossRef]
- Guo, Q.; Meng, S.; Wang, D.; Zhao, Y.; Ye, M.; Yang, W.; Liu, Z. Investigation of gas–solid bubbling fluidized beds using ECT with a modified Tikhonov regularization technique. AIChE J. 2018, 64, 29–41. [Google Scholar] [CrossRef]
- Che, H.; Wu, M.; Ye, J.; Yang, W.; Wang, H. Monitoring a lab-scale wurster type fluidized bed process by electrical capacitance tomography. Flow Meas. Instrum. 2018, 62, 223–234. [Google Scholar] [CrossRef]
- Huang, K.; Meng, S.; Guo, Q.; Ye, M.; Shen, J.; Zhang, T.; Yang, W.; Liu, Z. High-temperature electrical capacitance tomography for gas–solid fluidised beds. Meas. Sci. Technol. 2018, 29, 104002. [Google Scholar] [CrossRef]
- Li, X.; Jaworski, A.J.; Mao, X. Bubble size and bubble rise velocity estimation by means of electrical capacitance tomography within gas-solids fluidized beds. Measurement 2018, 117, 226–240. [Google Scholar] [CrossRef]
- Zhu, X.; Dong, P.; Tu, Q.; Zhu, Z.; Yang, W.; Wang, H. Investigation of gas–solid flow characteristics in the cyclone dipleg of a pressurised circulating fluidised bed by ECT measurement and CPFD simulation. Meas. Sci. Technol. 2019, 30, 054002. [Google Scholar] [CrossRef]
- Zeeshan, Z.; Zuccarelli, C.E.; Acero, D.O.; Marashdeh, Q.M.; Teixeira, F.L. Enhancing Resolution of Electrical Capacitive Sensors for Multiphase Flows by Fine-Stepped Electronic Scanning of Synthetic Electrodes. IEEE Trans. Instrum. Meas. 2019, 68, 462–473. [Google Scholar] [CrossRef]
- Zhao, C.; Lv, J.; Du, S. Geometrical Deviation Modeling and Monitoring of 3D Surface Based on Multi-output Gaussian Process. Measurement 2022, 199, 111569. [Google Scholar] [CrossRef]
- Tang, Z.; Wang, S.; Chai, X.; Cao, S.; Ouyang, T.; Li, Y. Auto-encoder-extreme learning machine model for boiler NOx emission concentration prediction. Energy 2022, 256, 124552. [Google Scholar] [CrossRef]
- Lu, Y.; Fu, X.; Chen, F.; Wong, K.K.L. Prediction of fetal weight at varying gestational age in the absence of ultrasound examination using ensemble learning. Artif. Intell. Med. 2020, 102, 101748. [Google Scholar] [CrossRef]
- Qian, M.; Niu, L.; Wong, K.K.L.; Abbott, D.; Zhou, Q.; Zheng, H. Pulsatile Flow Characterization in A Vessel Phantom With Elastic Wall Using Ultrasonic Particle Image Velocimetry Technique: The Impact of Vessel Stiffness on Flow Dynamics. IEEE Trans. Biomed. Eng. 2014, 99, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Wong, K.K.L.; Thavornpattanapong, P.; Cheung, S.C.P.; Tu, J.Y. Numerical Stability of Partitioned Approach in Fluid-Structure Interaction for a Deformable Thin-walled Vessel. Comput. Math. Methods Med. 2013, 2013, 638519. [Google Scholar] [CrossRef] [PubMed]
- Liu, G.; Wu, J.; Huang, W.; Wu, W.; Zhang, H.; Wong, K.K.L.; Ghista, D.N. Numerical Simulation of Flow in Curved Coronary Arteries with Progressive Amounts of Stenosis Using Fluid-Structure Interaction Modelling. J. Med. Imaging Health Inform. 2014, 4, 605–611. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Description | Symbol | Numerical Value |
|---|---|---|
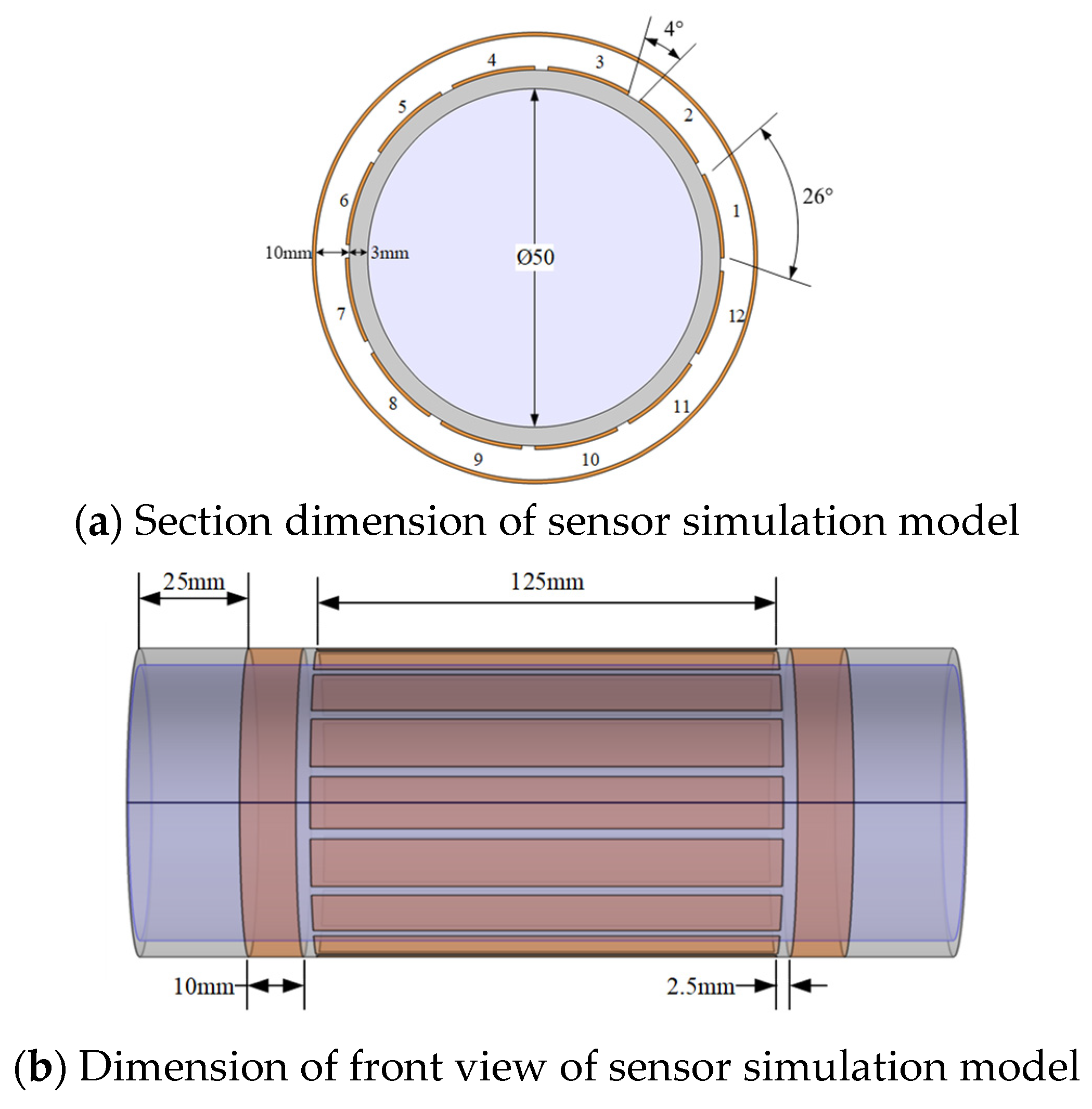
| Inside diameter of sensor pipe | Rp | 25 mm |
| Sensor tube wall thickness | Dp | 3 mm |
| Thickness of insulating filler layer | Di | 10 mm |
| Relative dielectric constant of pipe wall | εp | 3.7 |
| Relative dielectric constant of insulating filler | εi | 1 |
| Sensor electrode length | Lp | 125 mm |
| Sensor electrode coverage angle | α | 26° |
| Electrode spacing angle | β | 4° |
| Sensor excitation voltage | VE | 1 V |
| Spacing Angle | Numerical Value | Spacing Angle | Numerical Value | Spacing Angle | Numerical Value |
|---|---|---|---|---|---|
| β1 | 4.0999° | β5 | 3.7165° | β9 | 4.1944° |
| β2 | 4.1515° | β6 | 4.3528° | β10 | 3.8251° |
| β3 | 3.6833° | β7 | 3.9397° | β11 | 3.9477° |
| β4 | 3.9912° | β8 | 3.9815° | β12 | 3.9799° |
| Medium Distribution | Control Parameters | Parameter Description | Value/mm |
|---|---|---|---|
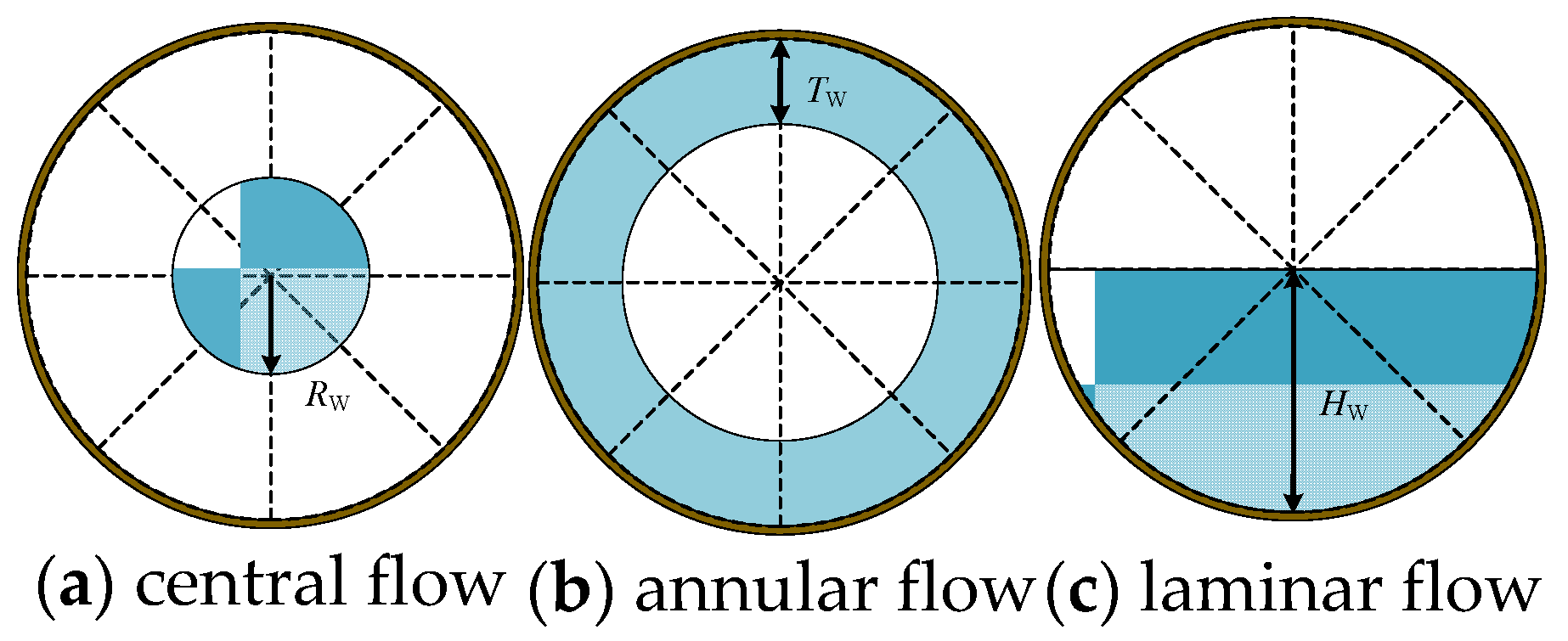
| Central flow | Rw | Water column radius | 2.5, 7.5, 12.5, 17.5, 22.5 |
| Annular flow | Tw | Water ring thickness | 2.5, 7.5, 12.5, 17.5, 22.5 |
| Laminar flow | Hw | Water layer height | 9, 17, 25, 33, 41 |
| Sample No. | Central Flow RMSE/% | Annular Flow RMSE/% | Laminar Flow RMSE/% | |||
|---|---|---|---|---|---|---|
| Before Compensation | After Compensation | Before Compensation | After Compensation | Before Compensation | After Compensation | |
| 1 | 7.51 | 0.56 | 5.75 | 1.96 | 7.05 | 1.81 |
| 2 | 7.56 | 0.54 | 6.83 | 0.97 | 6.80 | 1.47 |
| 3 | 7.69 | 0.52 | 6.86 | 0.34 | 6.73 | 1.32 |
| 4 | 7.98 | 0.57 | 7.05 | 0.05 | 6.64 | 1.01 |
| 5 | 8.73 | 1.34 | 7.04 | 0.04 | 7.05 | 1.16 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, Y.; Lin, W.; Xiao, S.; Tang, K.; Lin, X. A Measurement Compensation Method for Electrical Capacitance Tomography Sensors with Inhomogeneous Electrode Parameters. Electronics 2022, 11, 2957. https://doi.org/10.3390/electronics11182957
Tang Y, Lin W, Xiao S, Tang K, Lin X. A Measurement Compensation Method for Electrical Capacitance Tomography Sensors with Inhomogeneous Electrode Parameters. Electronics. 2022; 11(18):2957. https://doi.org/10.3390/electronics11182957
Chicago/Turabian StyleTang, Yaohong, Weiqing Lin, Shungen Xiao, Kaihao Tang, and Xiufang Lin. 2022. "A Measurement Compensation Method for Electrical Capacitance Tomography Sensors with Inhomogeneous Electrode Parameters" Electronics 11, no. 18: 2957. https://doi.org/10.3390/electronics11182957