
A New Approach to Power Distribution by a Dual-Gate MOSFET for Controlling a Smart Actuator Array

Abstract
:1. Introduction
2. PD Circuit Design and Experiment
2.1. PD Logic Design
2.2. Control of MOSFETs
2.3. Circuit Fabrication
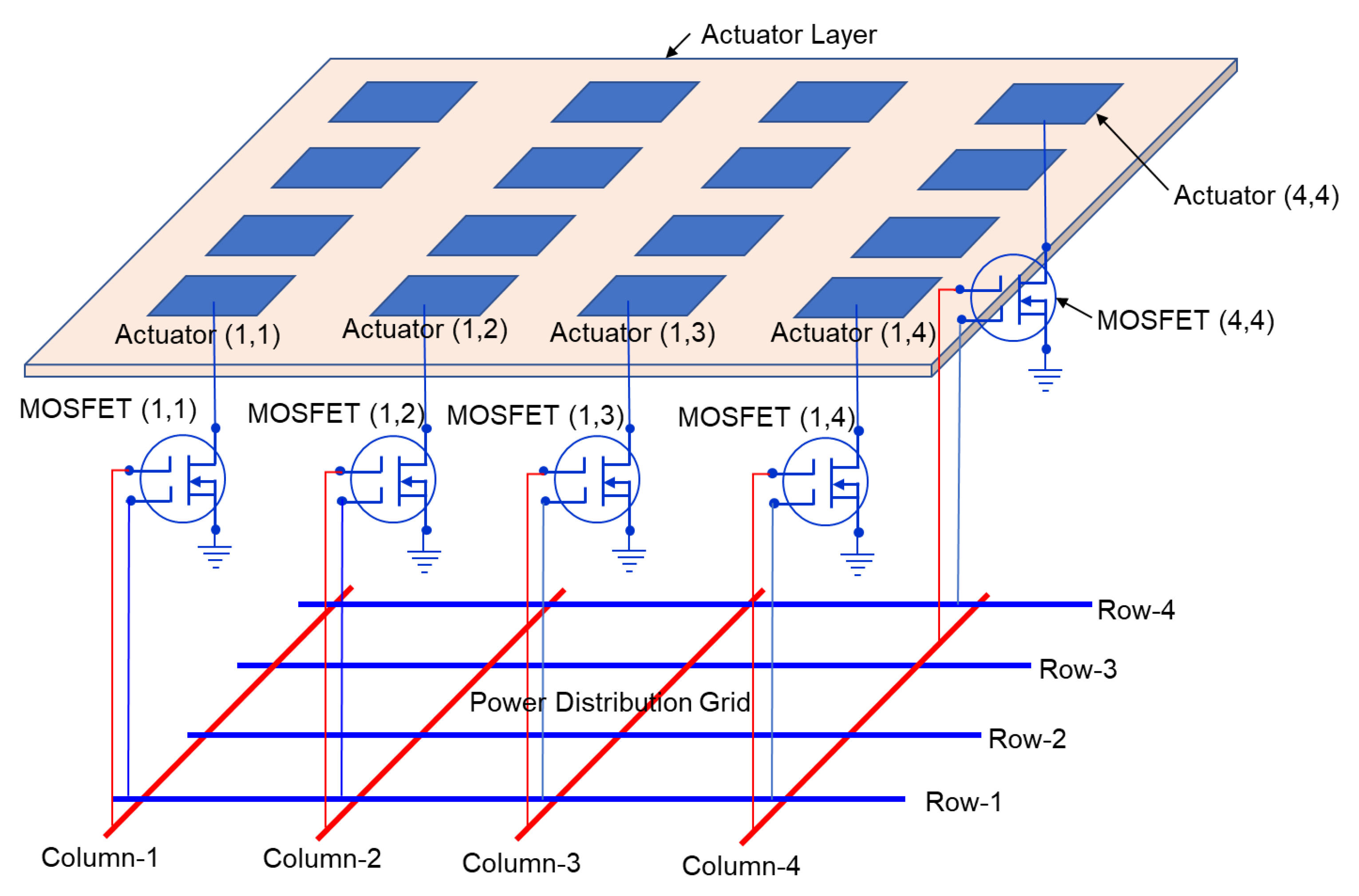
2.4. PD Circuit and Piezoelectric Actuators
3. Results and Discussion
3.1. PD Circuit Test
3.2. Piezoelectric Actuator Test
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kim, J.; Kim, J.W.; Kim, H.C.; Zhai, L.; Ko, H.U.; Muthoka, R.M. Review of Soft Actuator Materials. Int. J. Precis. Eng. Manufactur. 2019, 20, 2221–2241. [Google Scholar] [CrossRef]
- Bahl, S.; Nagar, H.; Singh, I.; Sehgal, S. Smart materials types, properties and applications: A review. Mater. Today Proceed. 2020, 28, 1302–1306. [Google Scholar] [CrossRef]
- Liu, Z.Q.; Qiu, H.; Li, X.; Yang, S.L. Review of Large Spacecraft Deployable Membrane Antenna Structures. Chin. J. Mech. Eng. 2017, 30, 1447–1459. [Google Scholar] [CrossRef]
- Kim, H.J.; Hariharan, S.; Julian, M.; MacDonnell, D.G. Technology and opportunities of photon sieve CubeSat with deployable optical membrane. Aerosp. Sci. Technol. 2018, 80, 212–220. [Google Scholar] [CrossRef]
- National Aeronautics and Space Administration, SRTM Mission Statistics. Available online: https://www2.jpl.nasa.gov/srtm/statistics.html (accessed on 28 April 2021).
- Schenk, M.; Viquerat, A.D.; Seffen, K.A.; Guest, S.D. Review of Inflatable Booms for Deployable Space Structures: Packing and Rigidization. J. Spacecr. Rocket. 2014, 51, 762–778. [Google Scholar] [CrossRef]
- Mughees, M.; Sadaf, M.; Gelani, H.E.; Bilal, A.; Saeed, F.; Chowdhury, S.; Techato, K.; Channumsin, S.; Ullah, N. Comparison of Efficiency-Based Optimal Load Distribution for Modular SSTs with Biologically Inspired Optimization Algorithms. Electronics 2022, 11, 1988. [Google Scholar] [CrossRef]
- Wagih, M.; Weddell, A.S.; Beeby, S.P. Rectennas for RF Energy Harvesting and Wireless Power Transfer: A Review of Antenna Design. IEEE Antennas Prop. Mag. 2019, 62, 95–107. [Google Scholar] [CrossRef]
- Yang, S.Y.; Kim, J.; Song, K.D. Flexible patch rectennas for wireless actuation of cellulose electro-active paper actuator. J. Electr. Electronic Technol. 2012, 7, 954–958. [Google Scholar] [CrossRef]
- Song, K.D.; Kim, J.; Kim, J.W.; Park, Y.; Ely, J.J.; Kim, H.J.; Choi, S.H. Preliminary operational aspects of microwave-powered airship drone. Int. J. Micro Air Vehicles 2019, 11, 1–10. [Google Scholar] [CrossRef]
- Choi, S.H.; Song, K.D.; Golembiewski, W.; Chu, S.-H.; King, G.C. Microwave power for smart material actuators. Smart Mater. Struct. 2004, 13, 38–48. [Google Scholar] [CrossRef]
- Yang, S.Y.; Mahadeva, S.K.; Kim, J. Remotely powered and controlled EAPap actuator by amplitude modulated microwaves. Smart Mater. Struct. 2013, 22, 017001. [Google Scholar] [CrossRef]
- Yang, S.Y.; Kim, J. Wireless power transmission using dipole rectennas made on flexible cellulose membrane. IET Microw. Anten. Prop. 2012, 6, 756–760. [Google Scholar] [CrossRef]
- Song, K.D.; Yi, W.J.; Chu, S.H.; Choi, S.H. Microwave Driven THUNDER Materials. Microw. Opt. Technol. Lett. 2003, 36, 331–333. [Google Scholar] [CrossRef]
- Yin, J.; Chen, S.; Chen, H.; Li, S.; Fu, H.; Liu, C. Design Space of GaN Vertical Trench Junction Barrier Schottky Diodes: Comprehensive Study and Analytical Modeling. Electronics 2022, 11, 1972. [Google Scholar] [CrossRef]
- Yoon, Y.J.; Lee, J.S.; Kim, D.; Lee, J.; Kang, I.M. Gallium Nitride Normally Off MOSFET Using Dual-Metal-Gate Structure for the Improvement in Current Drivability. Electronics 2020, 9, 1402. [Google Scholar] [CrossRef]
- Choi, S.H.; Song, K.D.; King, G.C.; Woodall, C. Rectenna Performance for Smart Membrane Actuators. Smart Struct. Mater. 2002: Smart Electron. MEMS Nanotechnol. 2002, 4700, 213–221. [Google Scholar]
- Available online: https://www.cedrat-technologies.com/fileadmin/datasheets/APA400M.pdf (accessed on 31 August 2022).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Comparison Contents | Hard-Wired PD System | Proposed PD Circuit System |
|---|---|---|
| Wire connection for N × N grid | N × N | 2N |
| Complexity | Complex | Simple |
| Integration with actuators | Hard | Possible |
| Weight | Heavy due to wiring | Relatively light |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, S.-H.; Kim, J. A New Approach to Power Distribution by a Dual-Gate MOSFET for Controlling a Smart Actuator Array. Electronics 2022, 11, 2956. https://doi.org/10.3390/electronics11182956
Lee S-H, Kim J. A New Approach to Power Distribution by a Dual-Gate MOSFET for Controlling a Smart Actuator Array. Electronics. 2022; 11(18):2956. https://doi.org/10.3390/electronics11182956
Chicago/Turabian StyleLee, Seok-Hyun, and Jaehwan Kim. 2022. "A New Approach to Power Distribution by a Dual-Gate MOSFET for Controlling a Smart Actuator Array" Electronics 11, no. 18: 2956. https://doi.org/10.3390/electronics11182956