
Influence of the Stiffness of the Robotic Arm on the Position of the Effector of an EOD Robot

 ,
,  , , and
, , and
Abstract
:1. Introduction
- Sensors for environmental perception [11,12,13]: in addition to sensors for obstacle detection, image sampling, and environmental conditions, simple sensors, such as potentiometers, limit switches (especially for limiting the travel of robotic arm elements), telemetry and current sensors, and temperature sensors for monitoring electronic equipment, are also required on the robot.
- Execution elements for performing actions on the environment [14,15,16,17,18,19], which are composed of linear, rotary, electric, hydraulic, or pneumatic motors; effector mechanisms have different configurations of the gripping mechanism, so that they can safely grasp the various objects, or even be able to operate “manually” on handcrafted devices. The choice and assembly of the execution elements on the robot chassis must be simple enough to reduce the preparation time of the intervention, and last but not least, the choice of engine types (transmission, robotic arm) should be made taking into account at least two parameters—current consumption and the load to be lifted/moved.
- Propulsion systems, which ensure the movement to the target and back and can even perform rotations/elevations to supplement the shoulder of the degrees of freedom of the robot; these propulsion systems may be on wheels, tracks, or mixed. Regardless of the propellant solution chosen, performing the turn involves friction with the ground, so for the present study, we considered that the most suitable is the crawler propulsion system [20,21,22,23]. From the analysis of the references, there is another important conclusion related to the stability in operation of the robot depending on the specific pressure on the ground. In the case of using a wheeled propulsion system, the sinking increases when the robotic arm lifts objects, at the position of the center of gravity, meaning that the robot controller must make additional corrections as regards the repositioning of the final effector.
- Conditions imposed by the type of crawler thruster or the existing track type [36,37,38]: The fact is that the use of tracked vehicles leads to a specific pressure on the ground, which can, among other things, facilitate a much quieter movement, especially if the track is made of rubber; another good element to take into account is the analytical model that describes the turning, meaning that we can obtain a prediction regarding the effects due to the resistance to turning (diving, slipping, skidding). We consider all of this to influence the actuation accuracy of the final effector.
- Limitations due to the level of uncertainty associated with the different artisanal pyrotechnic systems, which are usually unique, the reinforcement mechanisms, and the way they are made, differing from case to case [39,40,41]. The uncertainties that arise result from the analysis of data obtained by measuring various parameters: temperature, pressure, wind direction/air currents, the evolution of the flame front, the characteristics of the explosion, and the materials that can be caused by the blast. In relation to the reinforcement mechanisms, following the scanning of artisanal devices, it is not possible to obtain sufficient data to know how to orient the disruptor, which can even lead to triggering the respective device; in general, these devices are unique, with their designers trying to make them as complex as possible.
- Material characteristics specific to the structure of the robotic arm [42,43]: from this point of view, in order for the robot to be able to perform the tasks, and considering the fact that the shape of the arm must be configured to pass electrical cables, the motors, sensors, and frame must be made of rigid materials, which should be elastic but not easy to break due to loads with additional weights.
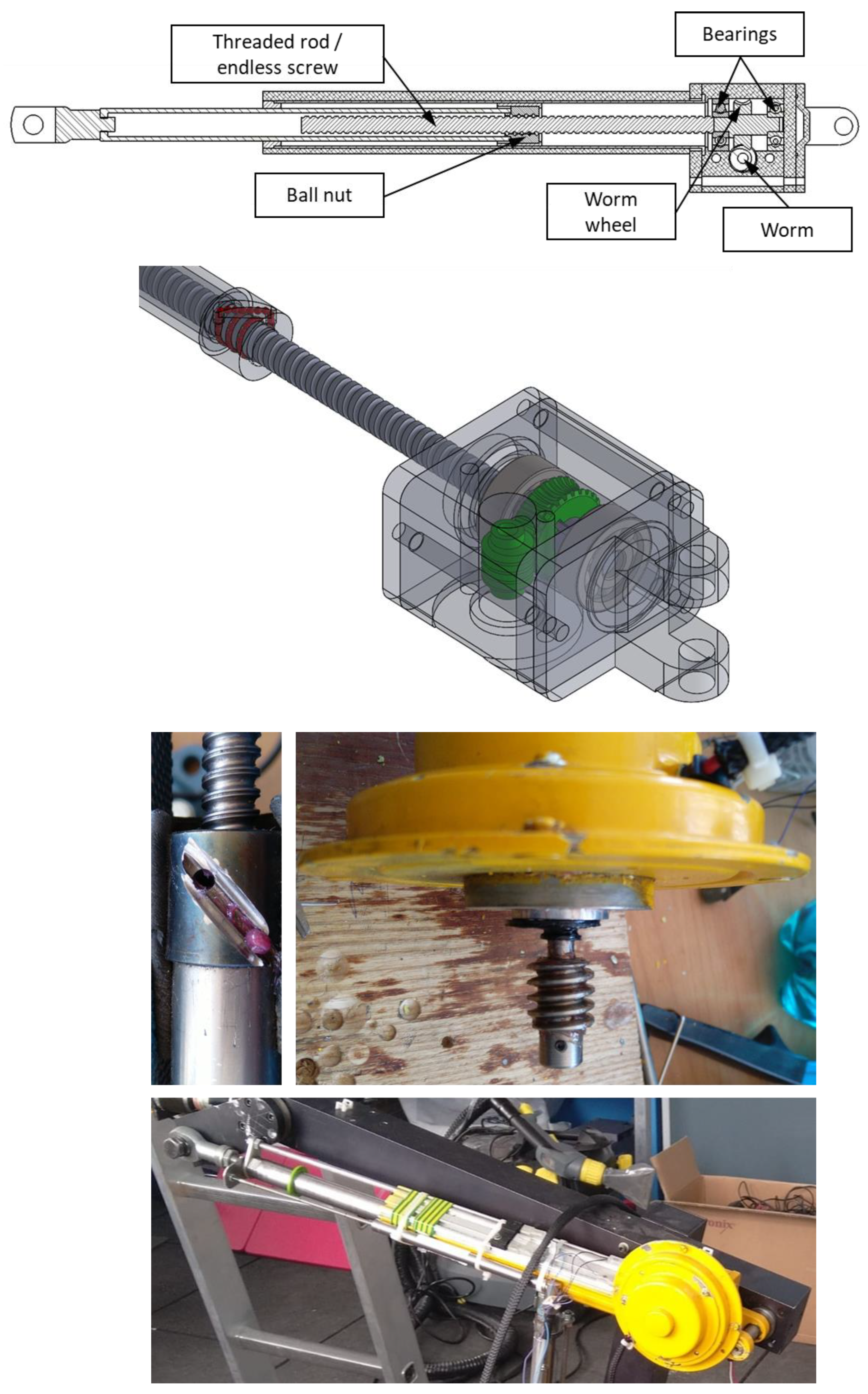
- The possibility of slipping in the ball mechanism of each component element; the guide system of the arm elements consists of a ball bearing encased in an endless nut/screw system.
- Establishing an analytical–numerical model for the calculation of direct and inverse kinematics [44].
- Testing and evaluation of the final effector positioning system for different geometric configurations of the robotic arm.
- -
- The elasticity of the component elements;
- -
- Deviations and inertia from the drive system.
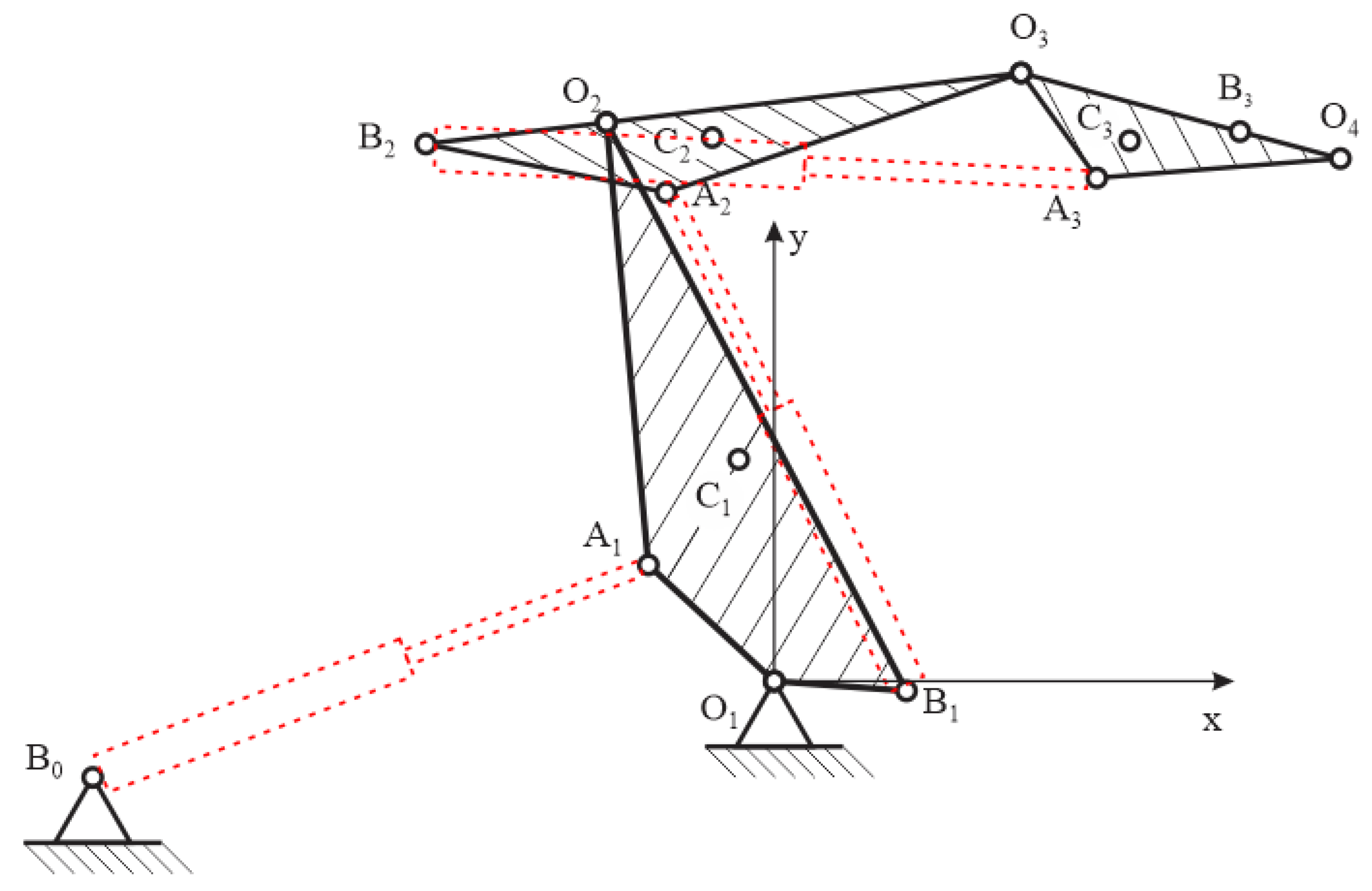
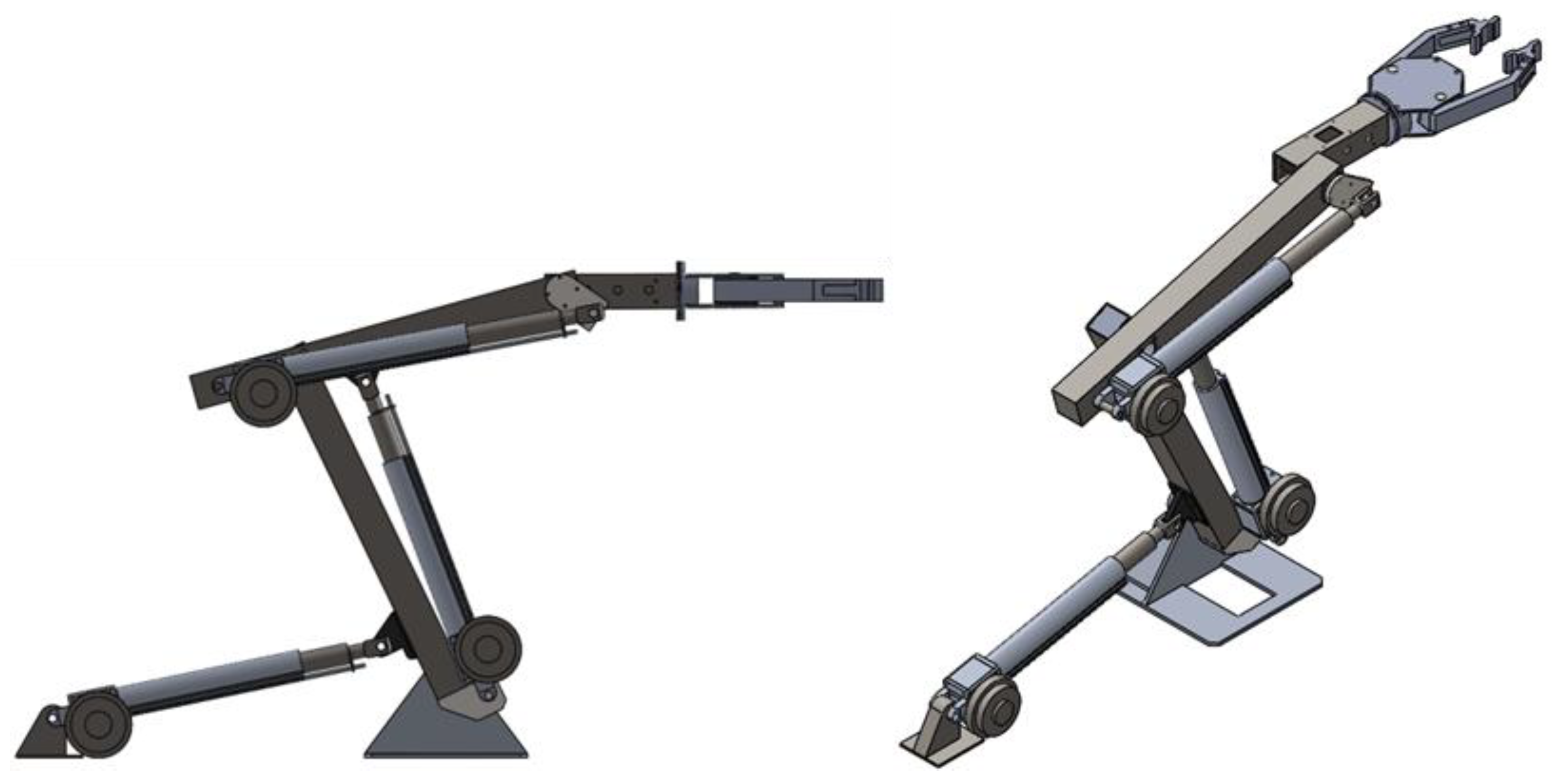
2. Mechanism Description—EOD Robot with Robotic Arm
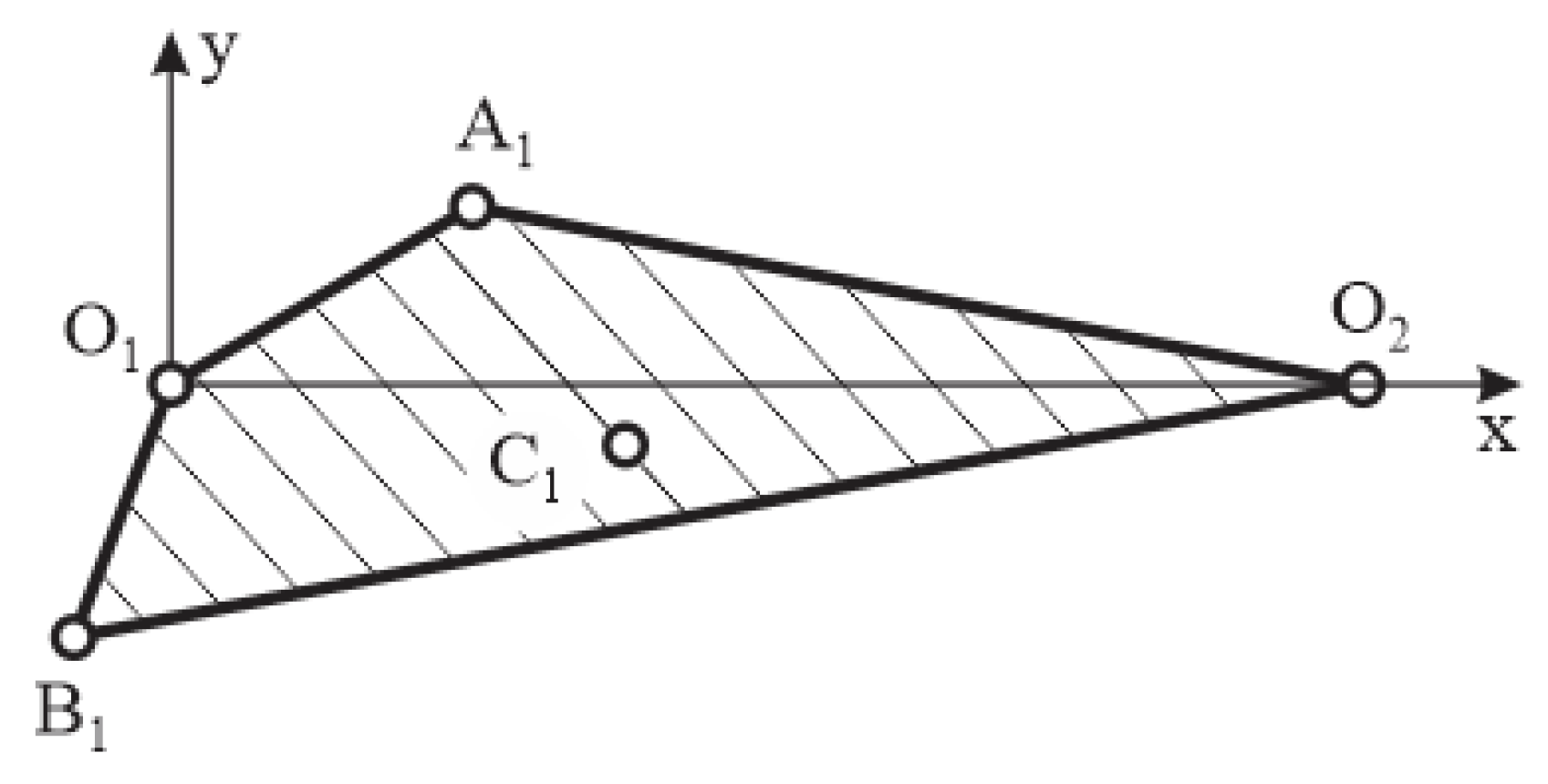
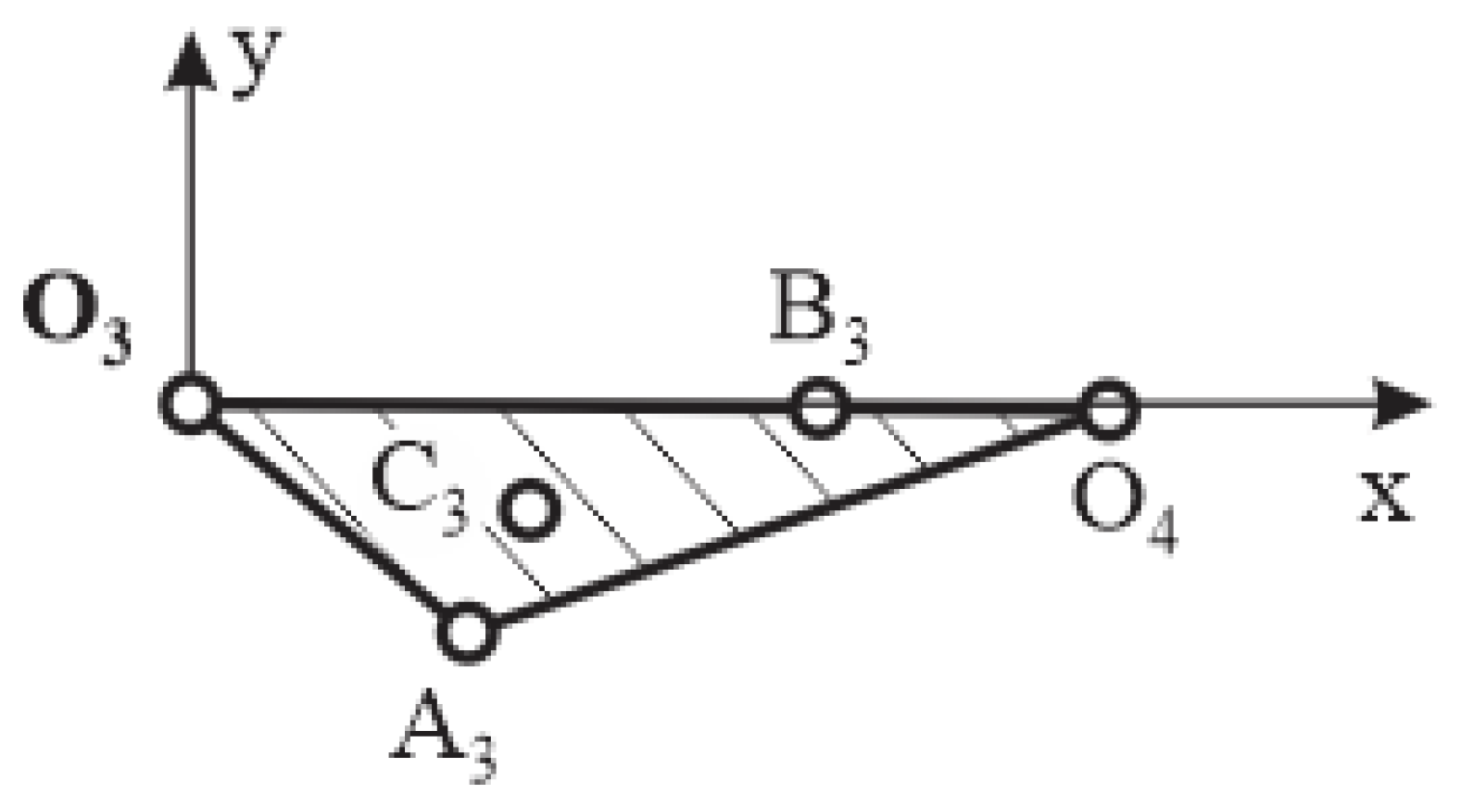
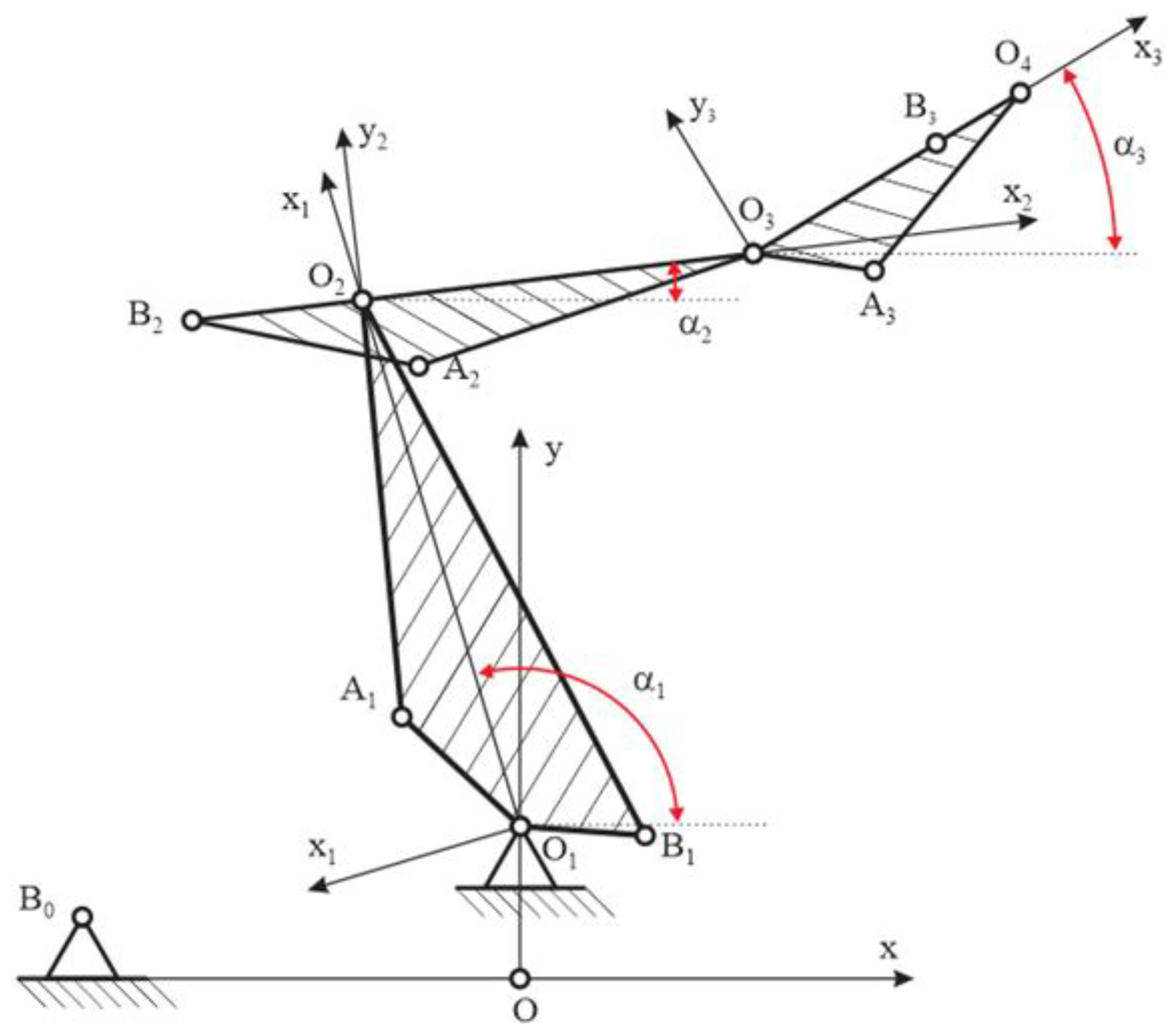
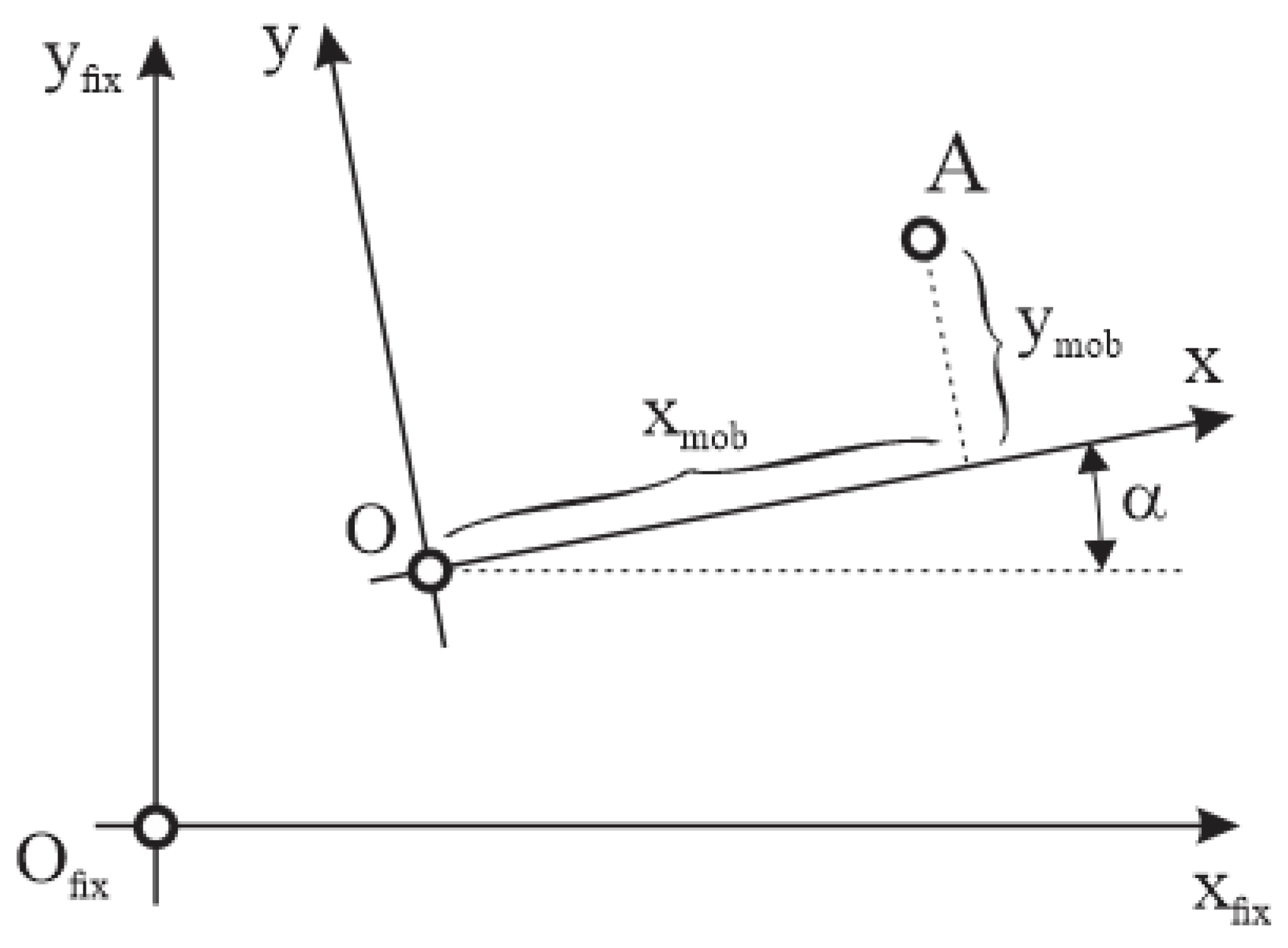
3. Geometric Description of the Working Configurations of the Robotic Arm
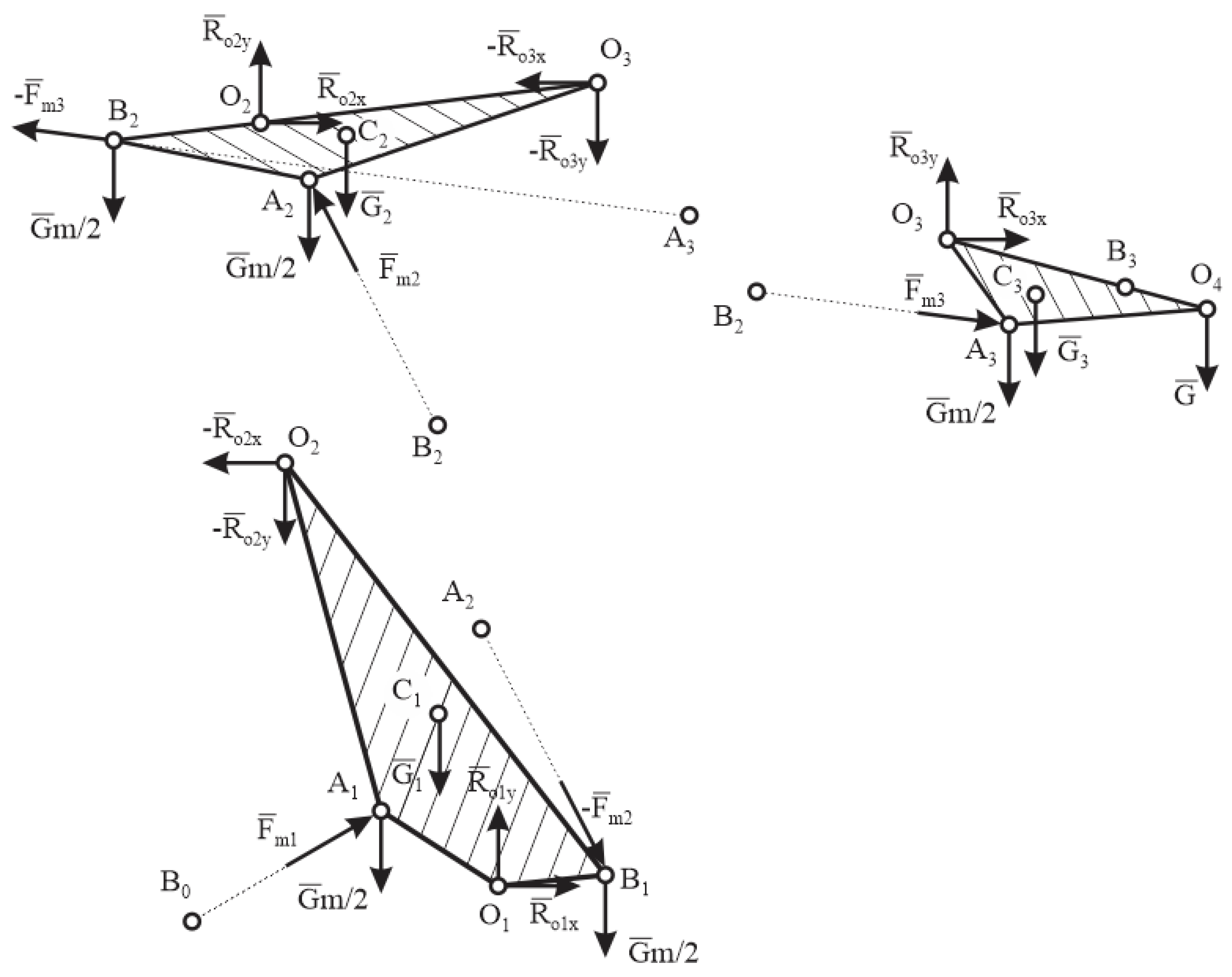
4. Analytical Modeling
5. Numerical Modeling
6. Experimental Results
- The operation of the arm drive motors was checked independently and simultaneously.
- The load-bearing platform (chassis side with propeller) was in contact with the ground to ensure working conditions similar to those in the area of operations.
- To ensure that the center of gravity of the robot, at rest, was the same, 10 lifts were performed from the ground, and then the item was dropped from a height of 100 mm, finding that the games in the track, which is made from rubber, and the track tension system had a margin of error of 0.5 mm.
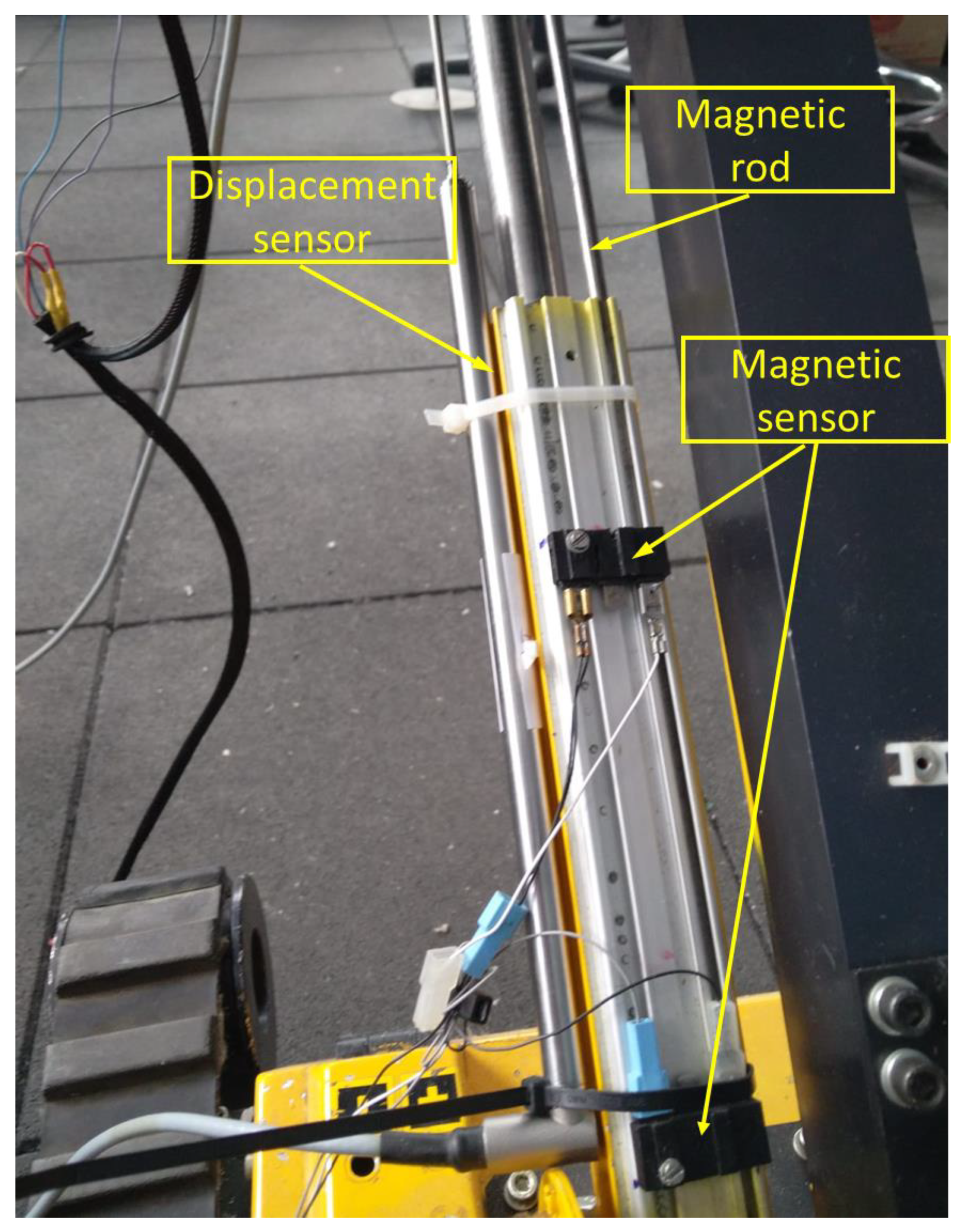
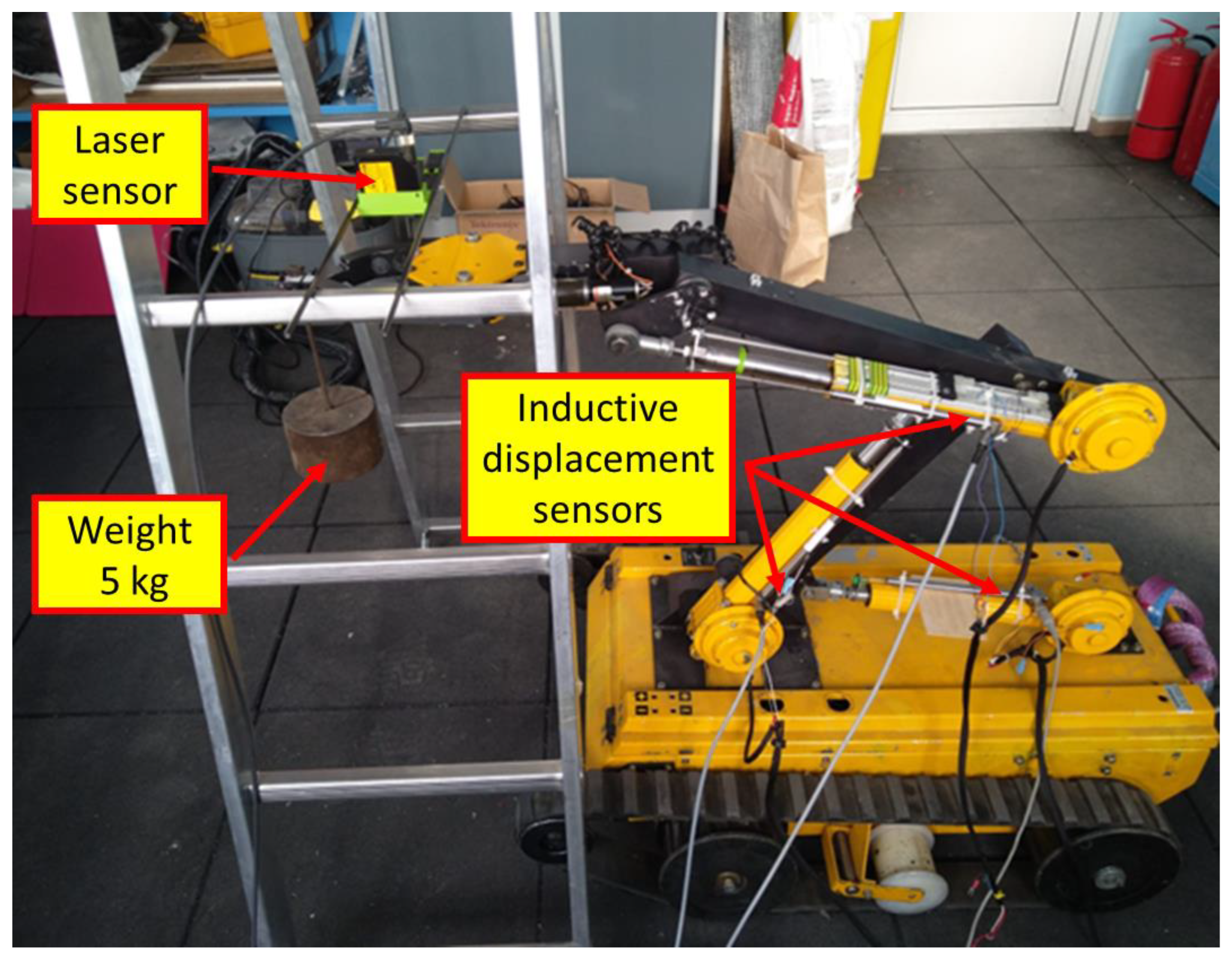
- Inductive displacement sensors were set to zero before each experimental determination.
- In the position corresponding to working configuration 1, with the laser sensor mounted, a forced vibration was induced around the final effector to check if the assembly returns to the initial position.
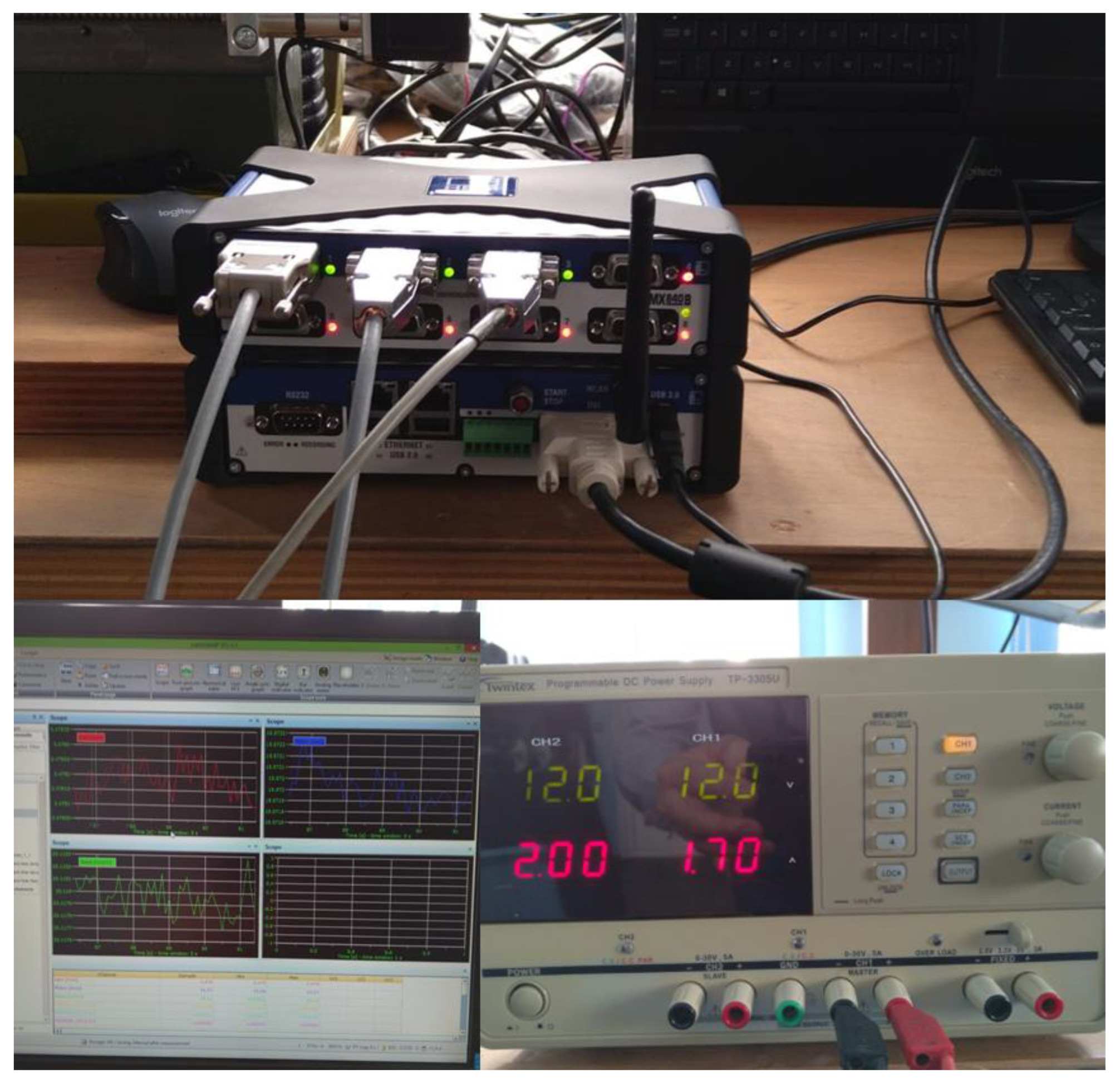
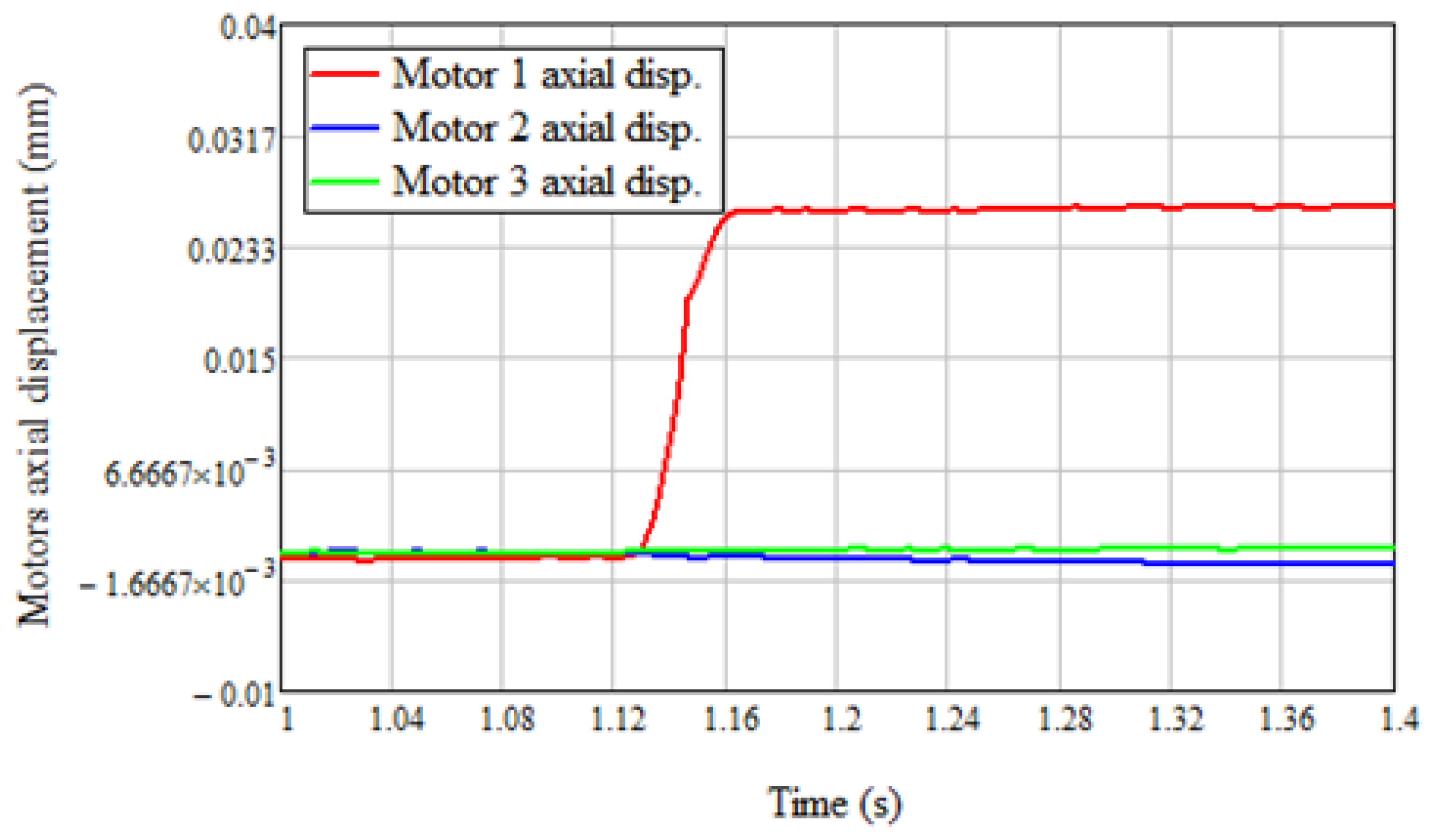
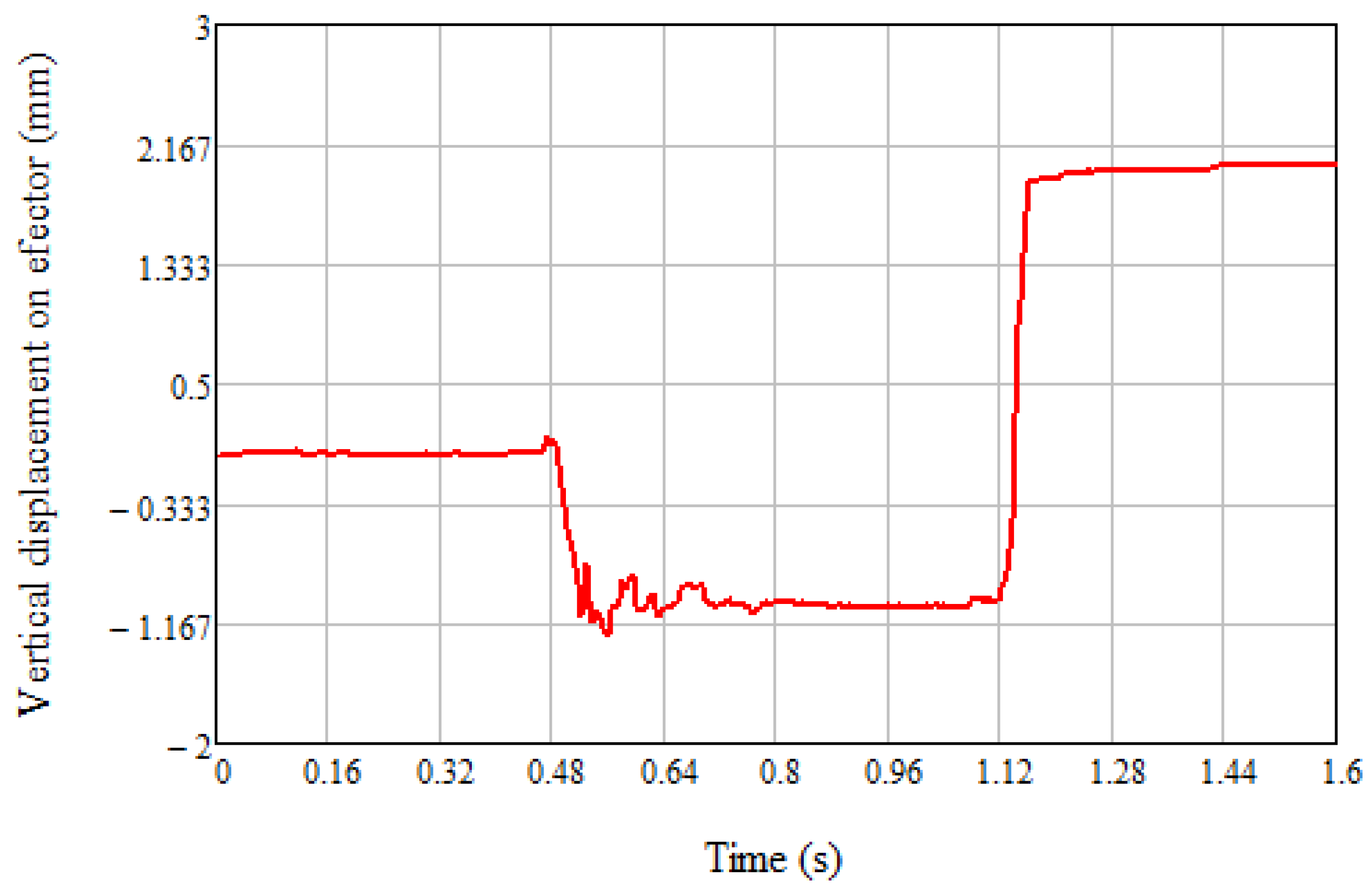
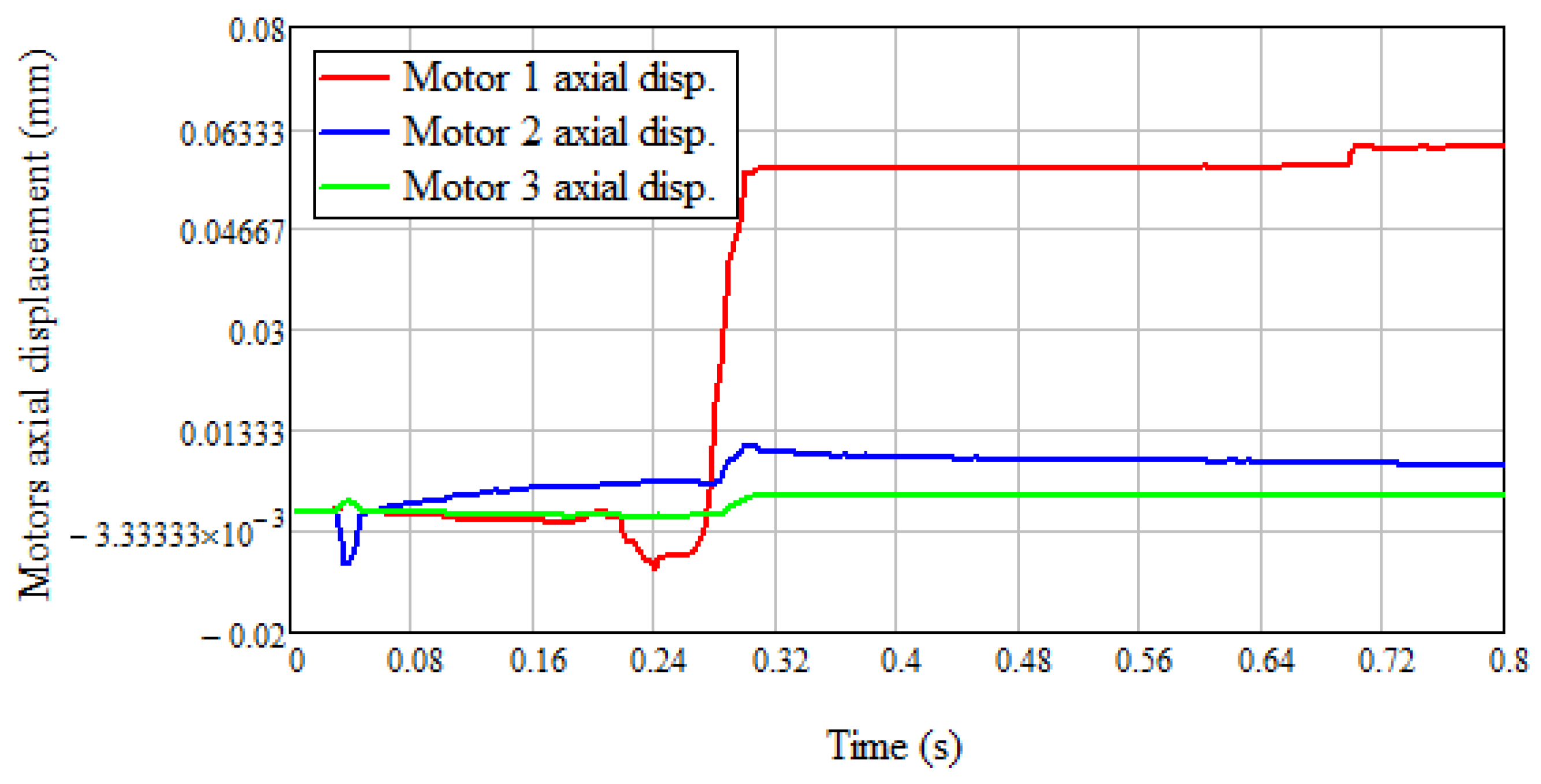
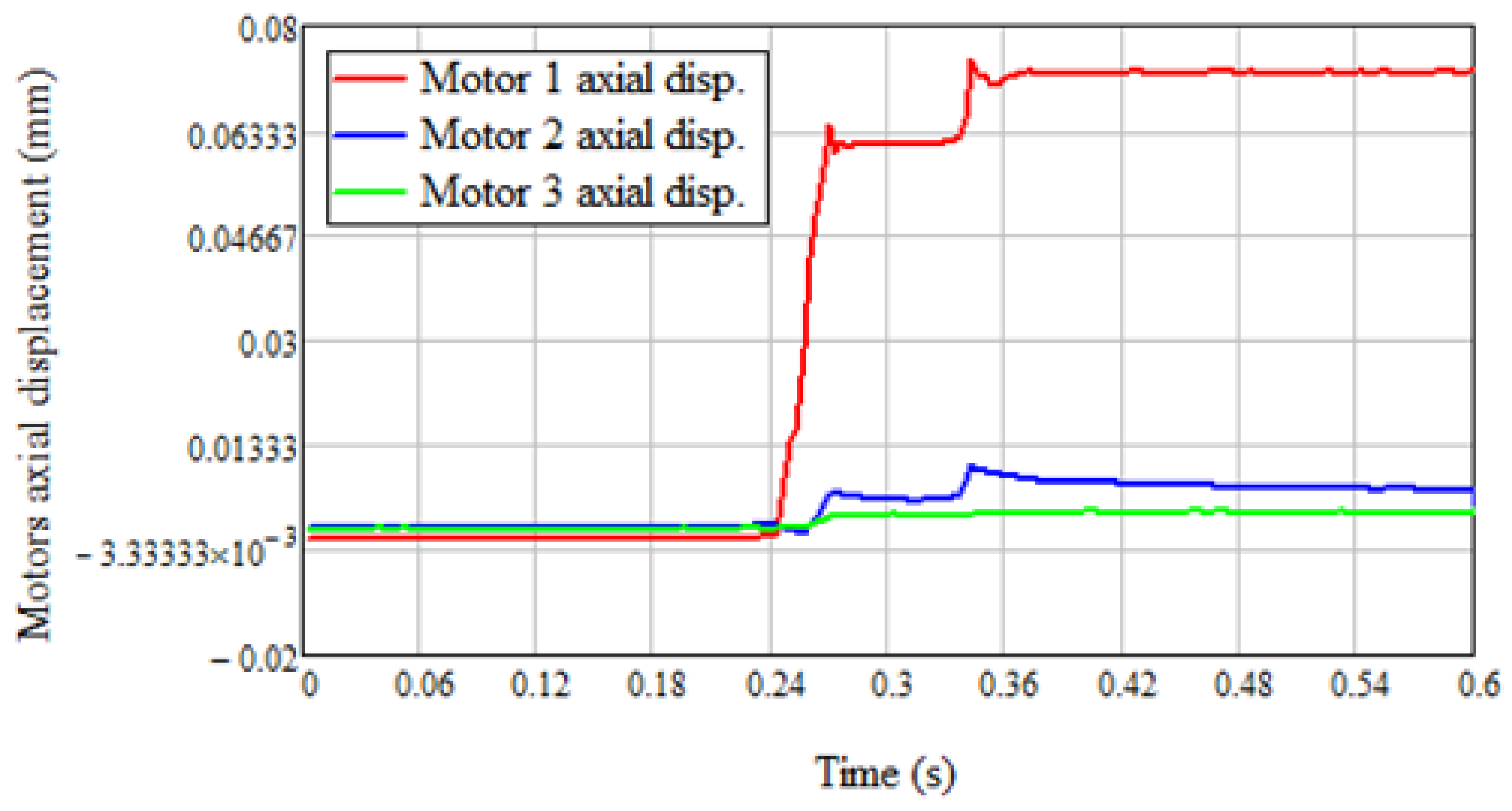
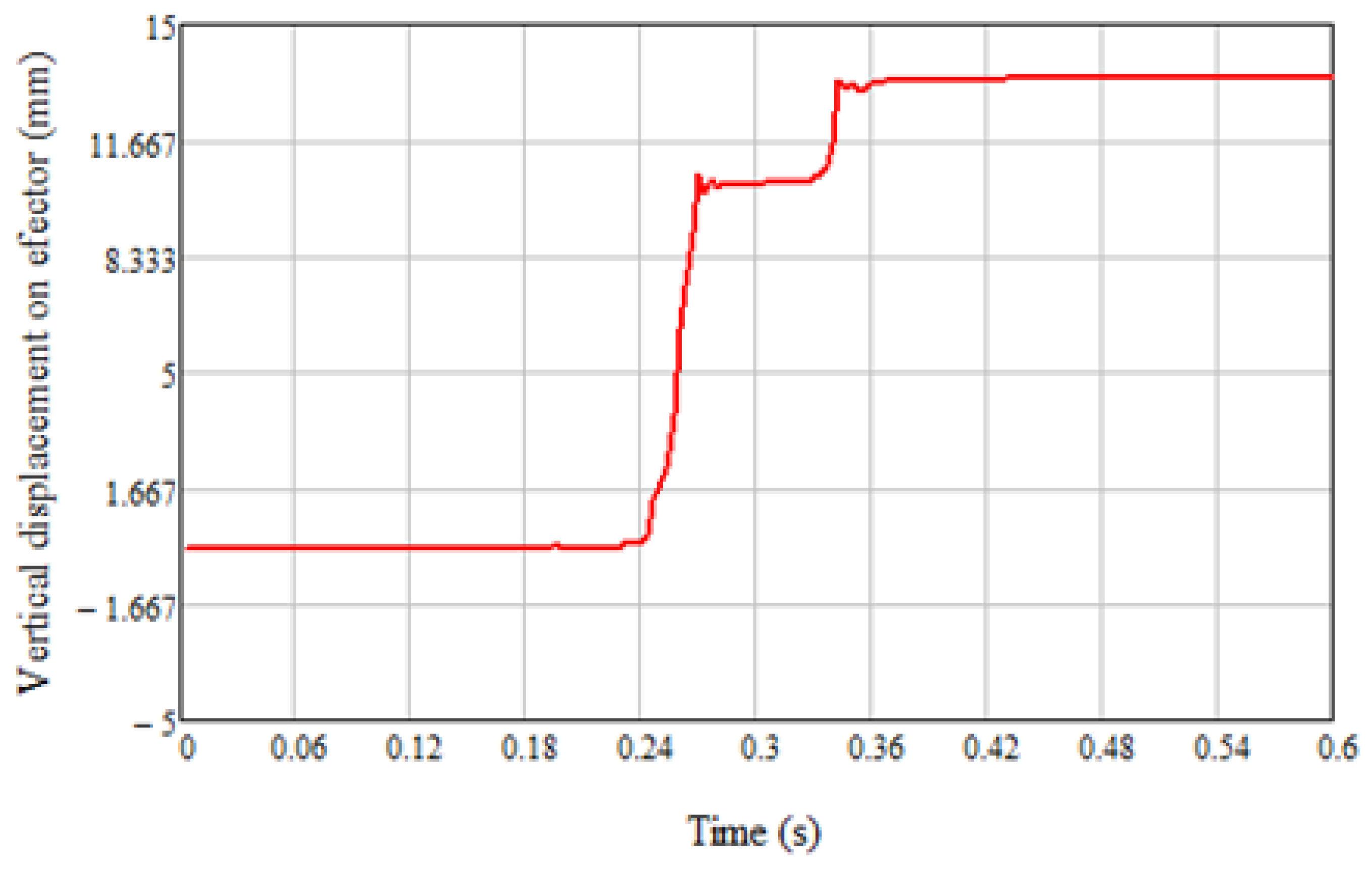
- For the experimental determinations of the displacements, the data acquisition was started, and, later, the weights that load the effector were added manually, placing them on the plate without shock. After stabilizing the signals, recording stopped (Figure 20). All data purchases were recorded with a frequency of 300Hz.
7. Conclusions
- It was observed following the experimental research that, in certain situations, if the effector was loaded with a certain force of weight, after its removal, the effector did not return to the initial position, which confirms the presence of deviations in the joints of the robotic arm;
- Due to these deviations, estimating the evolution of the effector element is difficult in certain operating conditions: certain arm openings and certain loads;
- The effects of deviations can be remedied by performing maintenance operations.
Author Contributions
Funding
Conflicts of Interest
References
- Zhao, J.; Han, T.; Ma, X.; Ma, W.; Liu, C.; Li, J.; Liu, Y. Research on Kinematics Analysis and Trajectory Planning of Novel EOD Manipulator. Appl. Sci. 2021, 11, 9438. [Google Scholar] [CrossRef]
- Tavsel, O. Mechatronic Design of an Explosive Ornance Disposal Robot. Master’s Thesis, Izmir Institute of Technology, Urla, Turkey, June 2005. [Google Scholar]
- Lopatka, M.J.; Sterniczuk, D. Concept of the manipulators set for fast IEDs neutralization. AIP Conf. Proc. 2018, 2029, 020037. [Google Scholar]
- Wells, P.; Deguire, D. TALON: A universal unmanned ground vehicle platform, enabling the mission to be the focus. Proc. SPIE 2005, 5804. [Google Scholar] [CrossRef]
- Nuță, I.; Orban, O.; Grigore, L.Ș. Development and improvement of technology in emergency response. Procedia Econ. Financ. 2015, 32, 603–609. [Google Scholar] [CrossRef] [Green Version]
- Peskoe-Yang, L. Paris Firefighters Used This Remote-Controlled Robot to Extinguish the Notre Dame Blaze. IEEE Spectrum, 22 April 2019. [Google Scholar]
- Raghavendran, P.S.; Suresh, M.; Ranjith Kumar, R.; Ashok Kumar, R.; Mahendran, K.; Swathi, S.; Kamesh, L.; Sanjay, R. An Intelligent Remote-Controlled Fire Fighting Machine for Autonomous Protection of Human being. Int. J. Adv. Res. Sci. Eng. Technol. 2018, 5, 7620–7626. [Google Scholar]
- Wang, W.; Gao, W.; Zhao, S.; Cao, W.; Du, Z. Robot Protection in the Hazardous Environments: Chapter 4; InTechOpen: London, UK, 2017. [Google Scholar]
- Constantin, D.; Toma, V. TVF-1: Experimental Model of an EOD Robot. J. Mil. Technol. 2018, 1, 51–56. [Google Scholar] [CrossRef]
- Grigore, L.Ș.; Holban-Oncioiu, I.; Priescu, I.; Joița, D. Development and Evaluation of the Traction Characteristics of a Crawler EOD Robot. Appl. Sci. 2021, 11, 3757. [Google Scholar] [CrossRef]
- Carey, M.W.; Kurz, E.M.; Matte, J.D.; Perrault, T.D. Novel EOD Robot Design with a Dexterous Gripper and Intituitive Teleoperation. In Proceedings of the World Automation Congress 2012, Puerto Vallarta, Mexico, 24–28 June 2012; Volume 1, pp. 463–469. [Google Scholar]
- Gubankov, A.; Yukhimets, D. Development and Experimental Studies of an Identification Method of Kinematic Parameters for Industrial Robots without External Measuring Instruments. Sensors 2022, 22, 3376. [Google Scholar] [CrossRef]
- Renders, J.M.; Rossignol, E.; Becquet, M.; Hanus, R. Kinematic calibration and geometrical parameter identification for robots. IEEE Trans. Robot. Autom. 1991, 7, 721–732. [Google Scholar] [CrossRef]
- Pratheep, V.G.; Chinnathambi, M.; Priyanka, E.B.; Ponmurugan, P.; Thiagarajan, P. Design and Analysis of six DOF Robotic Manipulator. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1055, 012005. [Google Scholar] [CrossRef]
- Zeng, J.J.; Yang, R.Q.; Zhang, W.J.; Weng, X.H.; Qian, J. Research on Semi-automatic Bomb Fetching for an EOD Robot. Int. J. Adv. Robot. Syst. 2007, 4, 247–252. [Google Scholar]
- De Cubber, G.; Balta, H.; Lietart, C. Teodor: A semi-autonomous search and rescue and demining robot. Appl. Mech. Mater. 2014, 658, 599–605. [Google Scholar] [CrossRef]
- Kruzic, S.; Music, J.; Kamnik, R.; Papic, V. End-Effector Force and Joint Torque Estimation of a 7-DoF Robotic Manipulator Using Deep Learning. Electronics 2021, 10, 2963. [Google Scholar] [CrossRef]
- Zhang, H.; Zhu, Y.; Liu, X.; Xu, X. Analysis of Obstacle Avoidance Strategy for Dual-Arm Robot Based on Speed Field with Improved Artificial Potential Field Algorithm. Electronics 2021, 10, 1850. [Google Scholar] [CrossRef]
- Colucci, G.; Botta, A.; Tagliavini, L.; Cavallone, P.; Baglieri, L.; Quaglia, G. Kinematic Modeling and Motion Planning of the Mobile Manipulator Agri.Q for Precision Agriculture. Machines 2022, 10, 321. [Google Scholar] [CrossRef]
- Hegedűs, T.; Németh, B.; Gáspár, P. Design of a Low-complexity Graph-Based Motion-Planning Algorithm for Autonomous Vehicles. Appl. Sci. 2020, 10, 7716. [Google Scholar] [CrossRef]
- Grigore, L.Ș.; Ileri, R.; Neculăescu, C.; Soloi, A.; Ciobotaru, T.; Vînturis, V. A class of autonomous robots prepared for unfriendly sunny environment. In Proceedings of the CAR2011—2011 3rd International Asia Conference on Informatics in Control, Automation and Robotics, Xiamen, China, 25–26 June 2011; Volume 646. [Google Scholar]
- Wong, J. Theory of Ground Vehicle, 2nd ed.; John Willey & Sons: New York, NY, USA, 1993; ISBN 13:978-0-470-17038-0. [Google Scholar]
- Wong, J.Y.; Chiang, C.F. A general theory for skid steering of tracked vehicles. J. Automob. Eng. 2001, 215, 343–355. [Google Scholar] [CrossRef]
- Balestrieri, E.; Daponte, P.; De Vito, L.; Lamonaca, F. Sensors and Measurements for Unmanned Systems: An Overview. Sensors 2021, 21, 1518. [Google Scholar] [CrossRef]
- Odedra, S.; Prior, S.D.; Karamanoglu, M. Investigating the Mobility of Unmanned Ground Vehicles. In Proceedings of the International Conference on Manufacturing and Engineering Systems, Huwei, Taiwan, 17–19 December 2009. [Google Scholar]
- Manish, R.; Lin, Y.C.; Ravi, R.; Hasheminasab, S.M.; Zhou, T.; Habib, A. Development of a Miniaturized Mobile Mapping System for In-Row Under-Canopy Phenotyping. Remote Sens. 2021, 13, 276. [Google Scholar] [CrossRef]
- Reina, G.; Milella, A.; Underwood, J. A self-Learning Ground Classifier Using Radar Features. In Field and Service Robotics; Springer: Berlin/Heidelberg, Germany; pp. 629–642.
- Im, G.; Kim, M.; Park, J. Parking Line Based SLAM Approach Using AVM/LiDAR Sensor Fusion for Rapid and Accurate Loop Closing and Parking Space Detection. Sensors 2019, 19, 4811. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Wang, W.; Qi, X.; Liao, Z.; Wei, R. Point-Plane SLAM Using Supposed Planes for Indoor Environments. Sensors 2019, 19, 3795. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Olmedo, N.A.; Barczyk, M.; Zhang, H.; Wilson, W.; Lipsett, M.G. A UGV-based modular robotic manipulator for soil sampling anf terramechanics investigation. J. Unmanned Veh. Syst. 2020, 8, 364–381. [Google Scholar] [CrossRef]
- Velaskar, P.; Vargas-Clara, A.; Jameel, O.; Redkar, S. Guided Navigation Control of an Unmanned Ground Vehicle using Global Positioning Systems and Inertial Navigation Systems. Int. J. Electr. Comput. Eng. 2014, 4, 329–342. [Google Scholar] [CrossRef]
- Muppidi, S. Development of a Low-Cost Controller and Navigation System for Unmanned Ground Vehicle. Master’s Thesis, West Virginia University, Morgantown, WV, USA, 2008; p. 152. [Google Scholar]
- Jaimes, A.; Gonzalez, J.; Ibarra, A.; Benavidez, P.; Jamshidi, M. Low-Cost Heterogeneous Unmanned Ground Vehicle (UGV) Testbed for Systems of Autonomous Vehicles Research. In Proceedings of the 14th Annual Conference System of Systems Engineering (SoSE), Anchorage, AK, USA, 19–22 May 2019; p. 18819465. [Google Scholar]
- Murtaza, Z.; Mehmood, N.; Jamil, M.; Ayaz, Y. Design and implementation of low cost remote-operated unmanned ground vehicle (UGV). In Proceedings of the International Conference on Robotics and Emerging Allied Technologies in Engineering (ICREATE), Islamabad, Pakistan, 22–24 April 2014. [Google Scholar]
- Kwet, C.; Lam, Y.; Man, L.; Koonjul, Y.; Nagowah, L. A low cost autonomous unmanned ground vehicle. Future Comput. Inform. J. 2018, 3, 304–320. [Google Scholar]
- Berns, K.; Nezhadfard, A.; Tosa, M.; Balta, H.; De Cubber, G. Unmanned Ground Robots for Rescue Tasks: Chapter 4; InTechOpen: London, UK, 2017. [Google Scholar]
- Ding, Z.; Li, Y.; Tang, Z. Theoretical Model for Prediction of Turning Resistance of Tracked Vehicle on Soft Terrain. Hindawi Math. Probl. Eng. 2020, 2020, 4247904. [Google Scholar] [CrossRef]
- Chen, K.; Kamezaki, M.; Katano, T.; Azuma, K.; Ishida, T.; Seki, M.; Ichiryu, K.; Sugano, S. Compound locomotion control system combining crawling and walking for multi-crawler multi-arm robot to adapt unstructured and unknown terrain. ROBOMECH J. 2018, 5, 2. [Google Scholar] [CrossRef] [Green Version]
- Laska, P.R. Bombs, IEDs, and Explosives. Identification, Investigation and Disposal Techniques; CRC Press: Boca Raton, FL, USA, 2015; ISBN 9781498714501. [Google Scholar]
- Lundberg, C. Assessment and Evaluation of Man-portable Robots for High-risk Professions in Urban Settings. Ph.D. Thesis; KTH School of Computer Science and Communication: Sweden, 2007. Available online: http://kth.diva-portal.org/smash/record.jsf?pid=diva2%3A12748&dswid=3243 (accessed on 20 January 2022).
- Grigore, L.Ș.; Priescu, I.; Grecu, D.L. Applied Artificial Intelligence in Fixed and Mobile Robotic Systems. Cap 4 Terrestrial Mobile Robots; AGIR: Bucharest, Romania, 2020; ISBN 978-973-72-0767-8. [Google Scholar]
- Wu, Q.; Chen, Z.; Wang, L.; Lin, H.; Jiang, Z.; Li, S.; Chen, D. Real-Time Dynamic Path Planning of Mobile Robots: A Novel Hybrid Heuristic Optimization Algorithm. Sensors 2020, 20, 188. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Trevelyan, J.P.; Kang, S.C.; Hamel, W.R. Robotics in Hazardous Applications. In Springer Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar] [CrossRef]
- Kalajahi, E.G.; Mahboubkhah, M.; Barari, A. Numerical Versus Analytical Direct Kinematics in a Novel 4-DOF Parallel Robot Designed for Digital Metrology. In Proceedings of the 17th IFAC Symposium on Information Control Problems in Manufacturing INCOM 2021, Budapest, Hungary, 7–9 June 2021; Volume 54, pp. 181–186. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Arm No. 1 | Arm No. 2 | Arm No. 3 | ||||||
|---|---|---|---|---|---|---|---|---|
| x | y | x | y | x | y | |||
| O1 | 500 | 0 | O2 | 400 | 0 | O3 | 400 | 0 |
| A1 | 80.94 | 65 | A2 | 90.5 | −51 | A3 | 44.8 | −31.4 |
| B1 | −50 | −44 | B2 | −128 | 0 | B3 | 300 | −44 |
| C1 | 230.12 | −2.4 | C2 | 165.5 | −1.3 | C3 | 230.12 | −2.4 |
| Working Configuration | Arm No. 1 | Arm No. 2 | Arm No. 3 |
|---|---|---|---|
| Configuration 1 | 115.6 | 15.4 | 0.2 |
| Configuration 2 | 104.7 | 15.7 | 0 |
| Configuration 3 | 0.1 | 5.6 | 0.1 |
| Configuration 4 | 74.8 | 5.8 | 0.4 |
| Configuration 5 | 58.6 | 6.0 | 0.4 |
| Arm Angle 1 | Arm Angle 2 | Arm Angle 3 | |||||
|---|---|---|---|---|---|---|---|
| Without Mass | With Mass | Without Mass | With Mass | Without Mass | With Mass | ||
| Configuration 1 | 1.5 kg | 115.6 | 115.5 | 15.4 | 15.2 | 0.2 | 0.1 |
| 5 kg | 115.6 | 115.2 | 15.4 | 14.7 | 0.2 | −1.2 | |
| 6.5 kg | 115.6 | 115.0 | 15.4 | 14.5 | 0.2 | −1.7 | |
| Configuration 2 | 1.5 kg | 104.7 | 105.7 | 15.7 | 15.1 | 0 | −0.2 |
| 5 kg | 104.7 | 105.3 | 15.7 | 14.6 | 0 | −0.9 | |
| 6.5 kg | 104.7 | 105.2 | 15.7 | 14.6 | 0 | −1.2 | |
| Configuration 3 | 1.5 kg | 89.9 | 89.7 | 5.6 | 5.4 | 0.1 | −0.1 |
| 5 kg | 89.9 | 89.6 | 5.6 | 5.1 | 0.1 | −1.4 | |
| 6.5 kg | 89.9 | 89.3 | 5.6 | 5.0 | 0.1 | −1.6 | |
| Configuration 4 | 1.5 kg | 74.8 | 74.7 | 5.8 | 5.6 | 0.4 | −0.1 |
| 5 kg | 74.8 | 74.3 | 5.8 | 5.2 | 0.4 | −1.1 | |
| 6.5 kg | 74.8 | 74.2 | 5.8 | 5.0 | 0.4 | −1.7 | |
| Configuration 5 | 1.5 kg | 58.6 | 58.4 | 6.0 | 5.8 | 0.4 | 0.2 |
| 5 kg | 58.6 | 58.1 | 6.0 | 5.4 | 0.4 | −1.0 | |
| 6.5 kg | 58.6 | 58.0 | 6.0 | 5.2 | 0.4 | −1.5 | |
| Table Loaded on Effector (kg) | Motor 1 (mm) | Motor 2 (mm) | Motor 3 (mm) | Vertical Effector Movement (mm) | |
|---|---|---|---|---|---|
| Configuration 1 | 1.5 | 0.026 | 8.268 × 10−4 | 7.732 × 10−4 | 2.025 |
| 5 | 0.0602 | 0.0074 | 0.0025 | 10.23 | |
| 6.5 | 0.0726 | 0.0063 | 0.0027 | 13.45 | |
| Configuration 2 | 1.5 | 0.0121 | 5.2591 × 10−5 | 6.3923 × 10−5 | 2.11 |
| 5 | 0.034 | 0.0024 | 0.0025 | 8.22 | |
| 6.5 | 0.0441 | 0.0096 | 0.0019 | 11.47 | |
| Configuration 3 | 1.5 | 0.0142 | 0.0031 | 0.0019 | 2.88 |
| 5 | 0.0336 | 0.0079 | 0.00023 | 12.05 | |
| 6.5 | 0.042 | 0.008 | 0.0001 | 14.31 | |
| Configuration 4 | 1.5 | 0.0136 | 0.0049 | 0.0002 | 3.02 |
| 5 | 0.034 | 0.0019 | 0.00068 | 12.70 | |
| 6.5 | 0.032 | 0.0053 | 0 | 15.56 | |
| Configuration 5 | 1.5 | 0.0011 | 0.002 | 0 | 5.04 |
| 5 | 0.0027 | 0.0025 | 0 | 9.50 | |
| 6.5 | 0.0038 | 0.0027 | 0.0002 | 11.43 |
| Weight (kg) | Fm1 (N) | Fm2 (N) | Fm3 (N) | |
|---|---|---|---|---|
| Configuration 1 | 1.5 | −185.5 | 252.4 | 114.4 |
| 5 | −441.1 | 535.6 | 381.3 | |
| 6.5 | −550.7 | 657 | 495.6 | |
| Configuration 2 | 1.5 | −196.4 | 223.4 | 113.5 |
| 5 | −439.1 | 474.2 | 378.3 | |
| 6.5 | −543.1 | 581.6 | 491.8 | |
| Configuration 3 | 1.5 | −229.6 | 222 | 136.8 |
| 5 | −485.2 | 469.2 | 455.9 | |
| 6.5 | −594.7 | 575.2 | 592.7 | |
| Configuration 4 | 1.5 | −268.5 | 211.3 | 137.1 |
| 5 | −550.1 | 446.6 | 456.9 | |
| 6.5 | −670.8 | 547.4 | 594 | |
| Configuration 5 | 1.5 | −325.3 | 217.5 | 136.5 |
| 5 | −652.6 | 459.7 | 454.9 | |
| 6.5 | −792.9 | 563.5 | 591.4 |
| Weight (kg) | Analytical Displacement Determined on the Basis of Experimental Values (Table 4) of Axial Displacements in Linear Motors (mm) | Experimentally Measured Displacement (mm) | |
|---|---|---|---|
| Configuration 1 | 1.5 | 1.49 | 2.03 |
| 5 | 10.55 | 10.23 | |
| 6.5 | 13.78 | 13.45 | |
| Configuration 2 | 1.5 | 7.37 | 2.11 |
| 5 | 13.48 | 8.22 | |
| 6.5 | 14.82 | 11.47 | |
| Configuration 3 | 1.5 | 2.44 | 2.88 |
| 5 | 11.34 | 12.05 | |
| 6.5 | 13.11 | 14.31 | |
| Configuration 4 | 1.5 | 4.24 | 3.02 |
| 5 | 13.19 | 12.7 | |
| 6.5 | 17.95 | 15.56 | |
| Configuration 5 | 1.5 | 3.35 | 5.04 |
| 5 | 13.79 | 9.5 | |
| 6.5 | 18.26 | 11.43 |
| Weight (kg) | The Displacement Determined Analytically Based on the Variation in the Angles of the Arms, the Angular Values Being Measured (mm) | Experimentally Measured Displacement (mm) | |
|---|---|---|---|
| Configuration 1 | 1.5 | 0.203 | 2.03 |
| 5 | 0.519 | 10.23 | |
| 6.5 | 0.602 | 13.45 | |
| Configuration 2 | 1.5 | 0.085 | 2.11 |
| 5 | 0.272 | 8.22 | |
| 6.5 | 0.389 | 11.47 | |
| Configuration 3 | 1.5 | 0.143 | 2.88 |
| 5 | 0.303 | 12.05 | |
| 6.5 | 0.364 | 14.31 | |
| Configuration 4 | 1.5 | 0.144 | 3.02 |
| 5 | 0.292 | 12.7 | |
| 6.5 | 0.293 | 15.56 | |
| Configuration 5 | 1.5 | 0.024 | 5.04 |
| 5 | 0.042 | 9.5 | |
| 6.5 | 0.056 | 11.43 |
| Weight (kg) | The Displacement Determined Analytically Based on the Variation in the Angles of the Arms, the Angular Values Being Measured (mm) | Experimentally Measured Displacement (mm) | |
|---|---|---|---|
| Configuration 1 | 1.5 | 3.622 | 2.03 |
| 5 | 9.679 | 10.23 | |
| 6.5 | 12.252 | 13.45 | |
| Configuration 2 | 1.5 | 2.716 | 2.11 |
| 5 | 8.133 | 8.22 | |
| 6.5 | 10.433 | 11.47 | |
| Configuration 3 | 1.5 | 3.076 | 2.88 |
| 5 | 10.375 | 12.05 | |
| 6.5 | 13.439 | 14.31 | |
| Configuration 4 | 1.5 | 1.816 | 3.02 |
| 5 | 7.976 | 12.7 | |
| 6.5 | 10.553 | 15.56 | |
| Configuration 5 | 1.5 | 0.189 | 5.04 |
| 5 | 4.853 | 9.5 | |
| 6.5 | 6.792 | 11.43 |
| Weight (kg) | Analytical Displacement Determined by Engine Elasticity not Determined Analytically (mm) | Analytically Determined Displacement Based on Numerically Determined Engine Elasticity (FEM) (mm) | Experimentally Measured Displacement (mm) | |
|---|---|---|---|---|
| Configuration 1 | 1.5 | 3.622 | 3.052 | 2.03 |
| 5 | 9.679 | 11.26 | 10.23 | |
| 6.5 | 12.252 | 13.227 | 13.45 | |
| Configuration 2 | 1.5 | 2.716 | 3.349 | 2.11 |
| 5 | 8.133 | 11.163 | 8.22 | |
| 6.5 | 10.433 | 14.512 | 11.47 | |
| Configuration 3 | 1.5 | 3.076 | 4.133 | 2.88 |
| 5 | 10.375 | 13.778 | 12.05 | |
| 6.5 | 13.439 | 17.91 | 14.31 | |
| Configuration 4 | 1.5 | 1.816 | 4.11 | 3.02 |
| 5 | 7.976 | 13.17 | 12.7 | |
| 6.5 | 10.553 | 17.81 | 15.56 | |
| Configuration 5 | 1.5 | 0.189 | 4.51 | 5.04 |
| 5 | 4.853 | 15.05 | 9.5 | |
| 6.5 | 6.792 | 19.56 | 11.43 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ștefan, A.; Grigore, L.Ș.; Oncioiu, I.; Constantin, D.; Mustață, Ș.; Toma, V.F.; Molder, C.; Gorgoteanu, D. Influence of the Stiffness of the Robotic Arm on the Position of the Effector of an EOD Robot. Electronics 2022, 11, 2355. https://doi.org/10.3390/electronics11152355
Ștefan A, Grigore LȘ, Oncioiu I, Constantin D, Mustață Ș, Toma VF, Molder C, Gorgoteanu D. Influence of the Stiffness of the Robotic Arm on the Position of the Effector of an EOD Robot. Electronics. 2022; 11(15):2355. https://doi.org/10.3390/electronics11152355
Chicago/Turabian StyleȘtefan, Amado, Lucian Ștefăniță Grigore, Ionica Oncioiu, Daniel Constantin, Ștefan Mustață, Vlad Florin Toma, Cristian Molder, and Damian Gorgoteanu. 2022. "Influence of the Stiffness of the Robotic Arm on the Position of the Effector of an EOD Robot" Electronics 11, no. 15: 2355. https://doi.org/10.3390/electronics11152355