
Multi-Objective Navigation Strategy for Guide Robot Based on Machine Emotion

Abstract
:1. Introduction
- (1)
- In the navigation scene, the number of guide robots is often far smaller than the number of tourists, and only a small number of people can be selected for service. Therefore, how to make the guide robot choose the service object reasonably needs to be studied.
- (2)
- Traditional guide robots cannot adjust their navigation strategies according to users’ emotional states. For users, such a guide robot is not humanized. Therefore, how to make the robot dynamically adjust the navigation strategy according to the perceived user state and environmental information remains to be studied.
- (3)
- To realize the humanized autonomous navigation strategy, the guide robot can understand the attributes of different tourist spots to estimate the most expected tourist spots. In the guided tour scenario, the decision-making indexes that may affect tourists include the content and distance of the tour site. How to make the robot understand this information remains to be studied.
- (4)
- To achieve the target navigation guided by tourists’ emotions, the guide robot should perform corresponding actions according to users’ emotions on the basis of understanding the environment. Therefore, it is necessary to design a detailed and fully functional navigation strategy.
- (1)
- This paper proposes a tourist emotions-oriented navigation strategy for tourist guide robots. Machine emotions are established according to tourists’ emotional states, and machine emotions give the robot the ability to have “empathy” with tourists, so as to find the target points most expected by tourists.
- (2)
- To help guide robots judge the most expected target points of tourists, a novel guide map is proposed, including the distance and relevance between different locations. Such a map helps the guide robot figure out which target points are relevant or irrelevant to the current location. Combined with machine emotion, it can judge whether the user is interested in the current tour content and make the most satisfying decision by combining with the distance information between different tour points.
- (3)
- In view of the situation in which the number of tourists is much larger than the number of guiding robots, the group that needs guiding robots most is identified through the evaluation of the communication atmosphere field of different groups.
2. Related Works
2.1. Artificial Emotional Model
2.2. Robot Navigation Strategy
3. Methodology
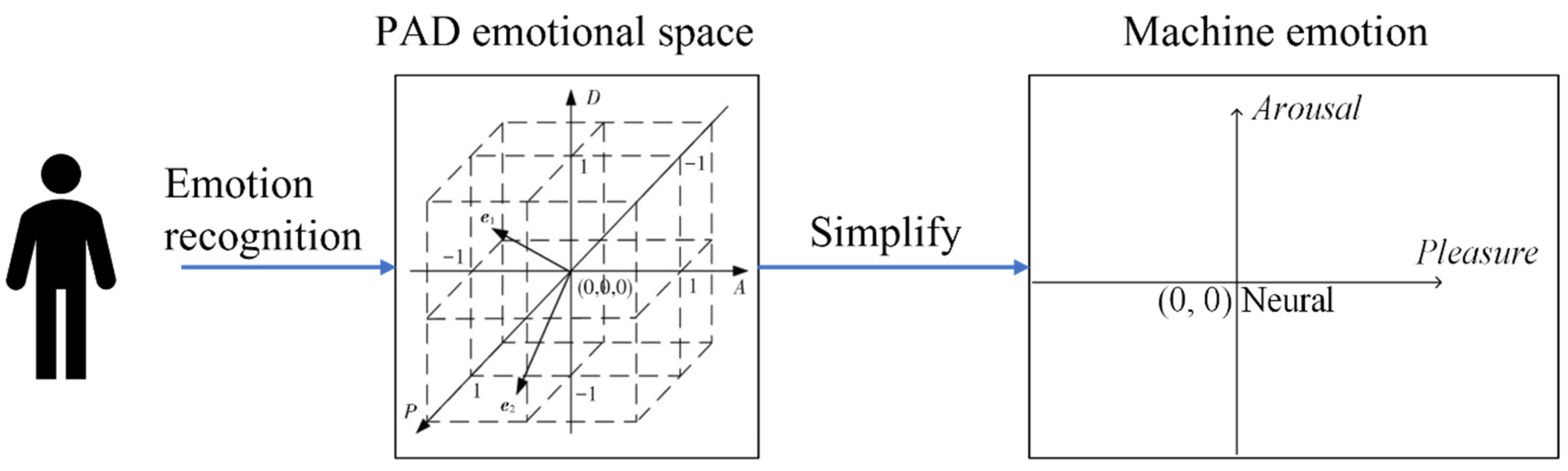
3.1. Concept of Machine Emotion
3.1.1. Description of Machine Emotion
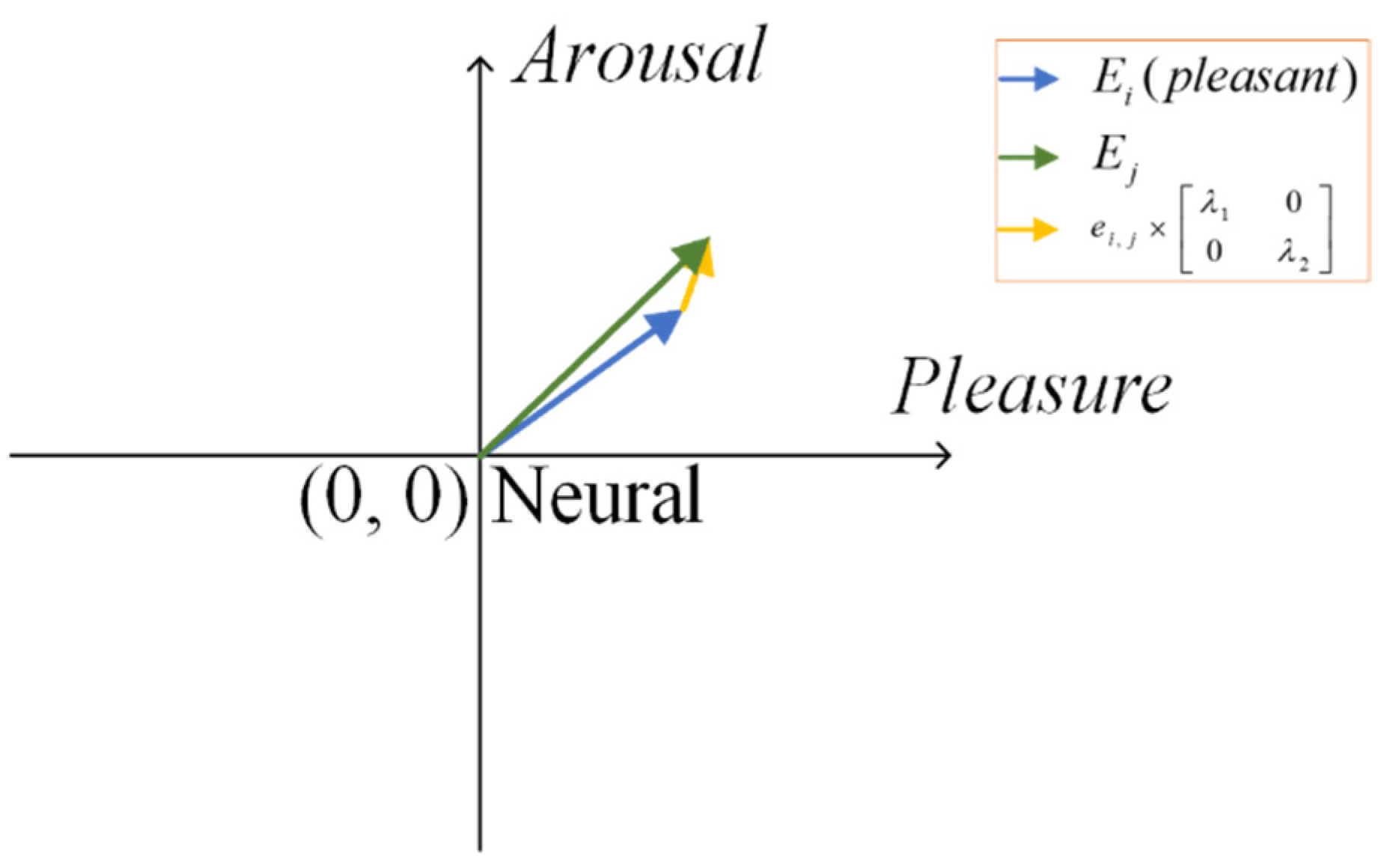
3.1.2. Transformation of Machine Emotion
3.1.3. The Influence of Current Emotion
3.1.4. Synthesis of Initial Machine Emotion
3.2. Navigation Strategy
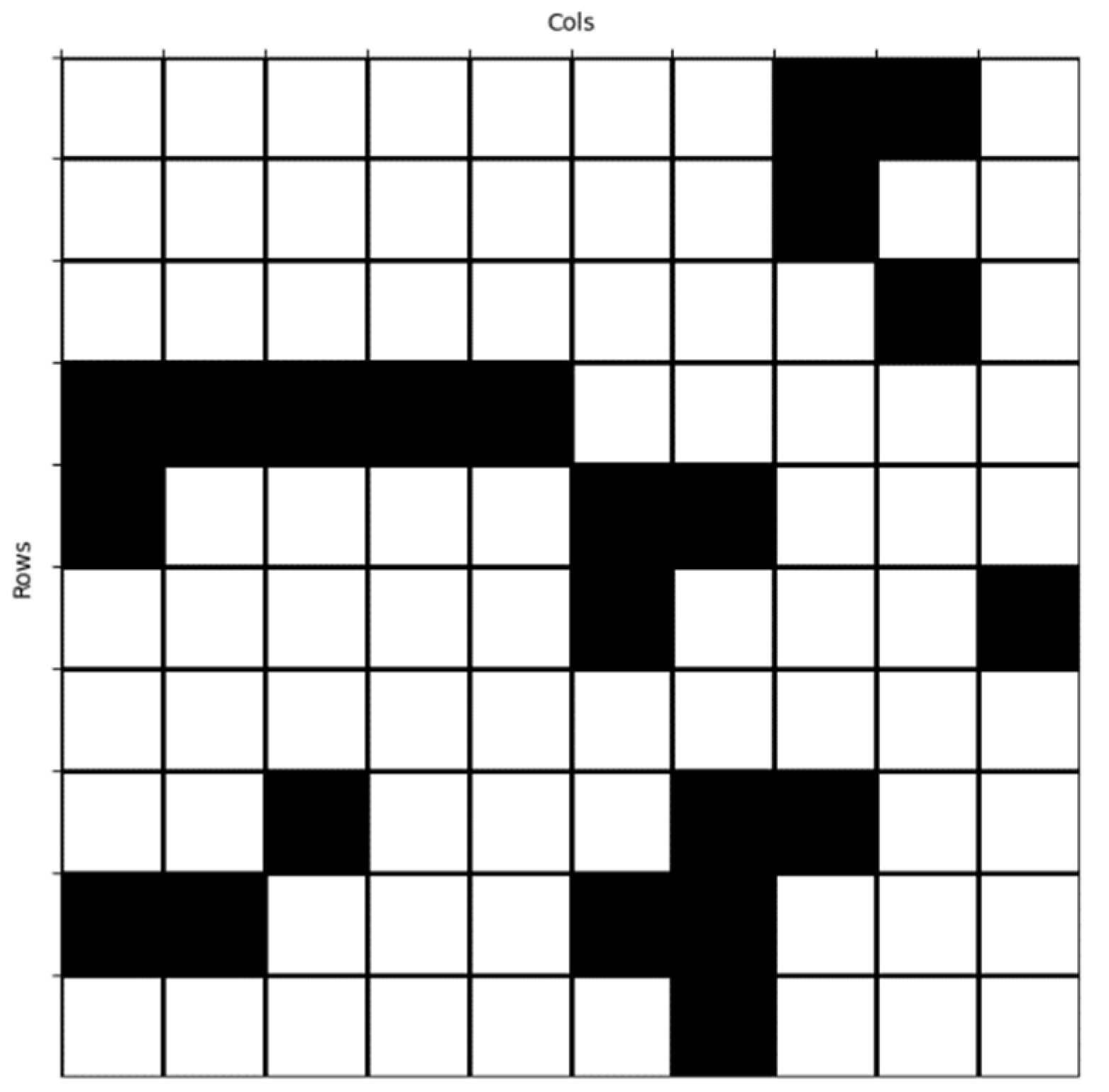
3.2.1. The Establishment of the Transcendental Scene Map
3.2.2. Machine Emotion Objective Function
3.2.3. Machine Emotion Penalty Function
3.2.4. Linear Weighted Multi-Objective Optimization Method Based on Machine Emotion
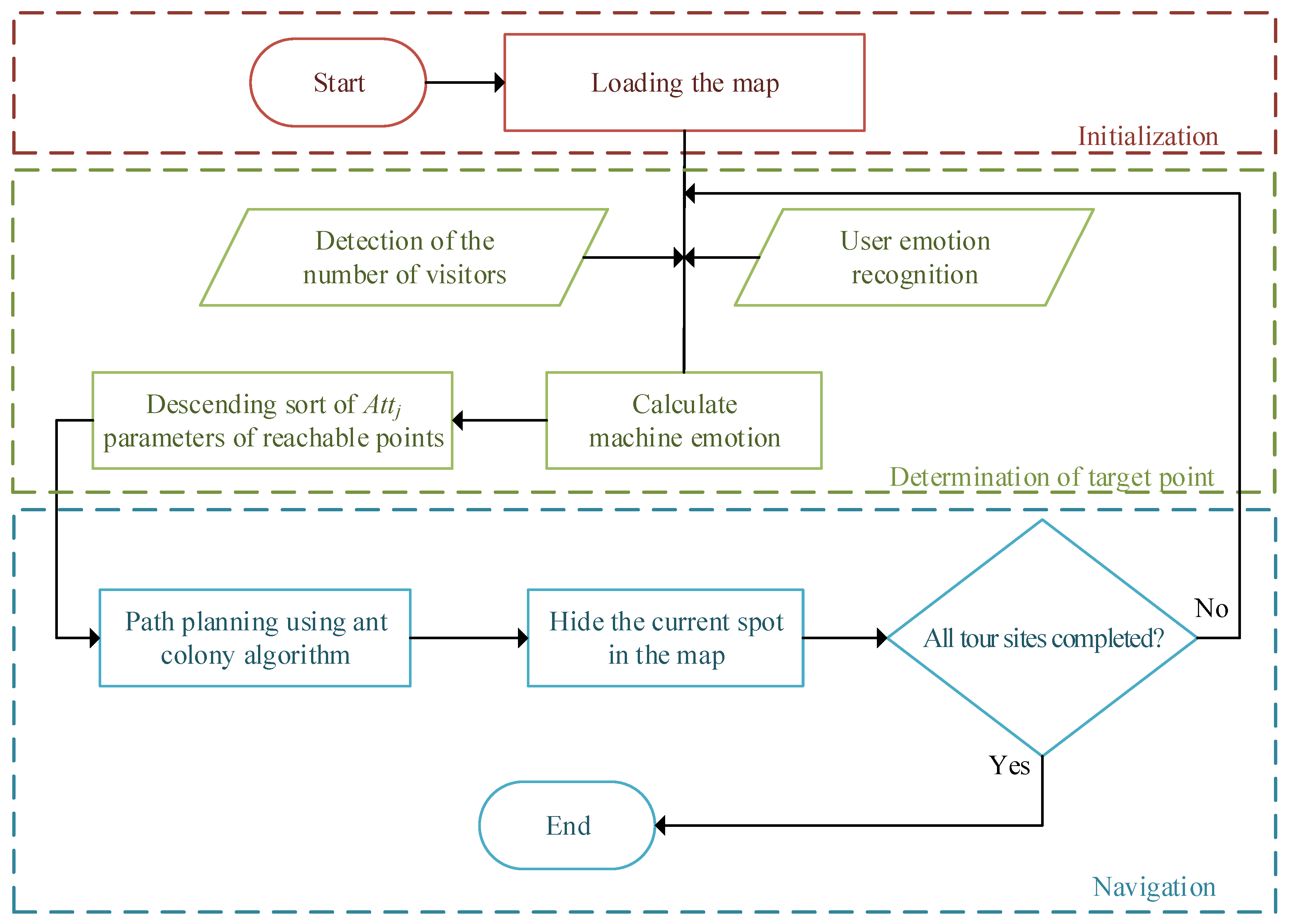
3.2.5. Navigation Process
4. Experiments and Discussions
4.1. Introduction to Experimental Platform
4.1.1. Hardware Environment Introduction
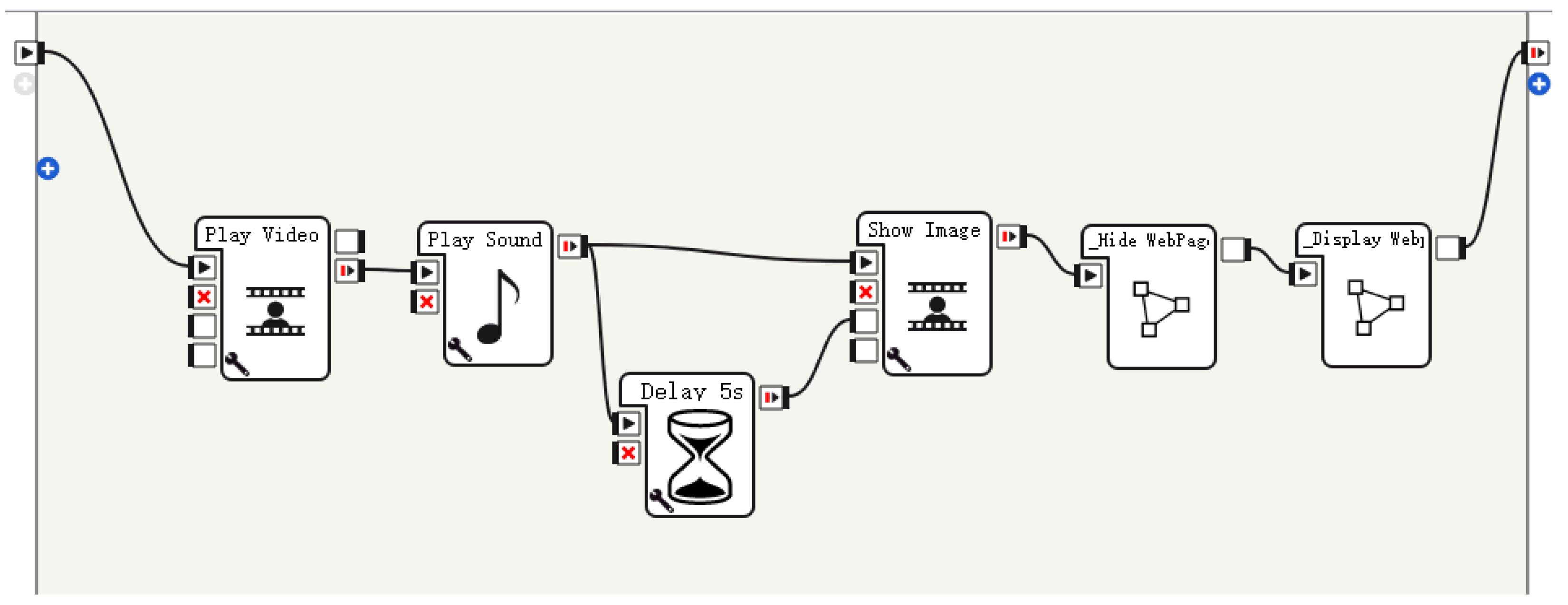
4.1.2. Introduction to Software Development Environment
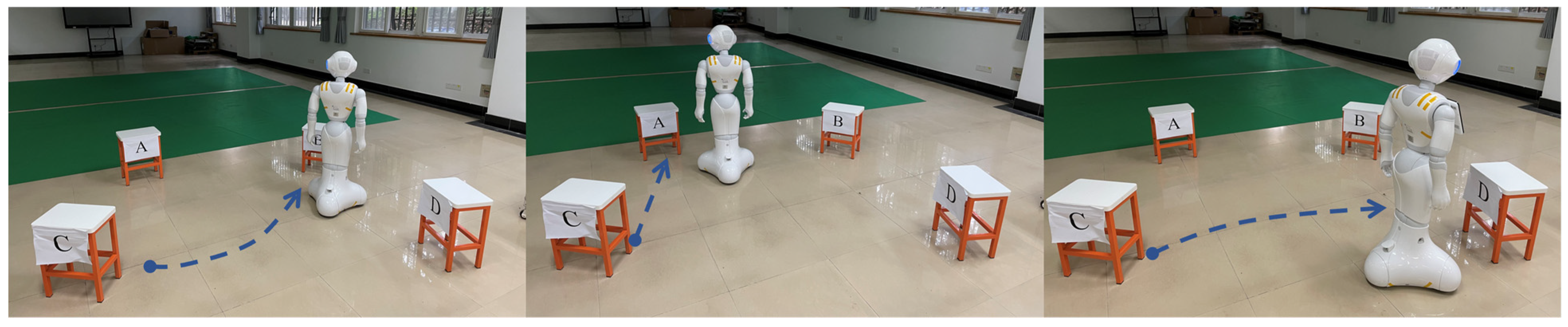
4.2. Authentication on Pepper
- Can you feel the robot sensing your mood changes?
- Can you feel that the robot senses your preferences/has some empathy?
- Does such a robot bring you a better experience?
5. Conclusions and Future Work
- (a)
- Using more informative maps to increase the basis that the guide robot can use to predict tourists’ preferences.
- (b)
- At present, only two dimensions are used to describe machine emotions, and it is hoped that a more appropriate emotional space can be used to describe machine emotions to better judge user emotions.
- (c)
- Specifying more navigation strategies for different scenarios, optimizing and applying them to more types of service robots.
- (d)
- After the start of the navigation, input is only available from a single tourist. In future research, real-time communication and atmosphere field analysis will be used to improve the strategy to achieve the goal of taking multiple inputs from different tourists.
Author Contributions
Funding
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Tao, Y. Development of Service Robots for The Development of Intelligent Society. Sci. Technol. Rev. 2015, 33, 58–65. [Google Scholar]
- Guo, Y.; Xie, Y.; Chen, Y.; Ban, X.; Sadoun, B.; Obaidat, M.S. An Efficient Object Navigation Strategy for Mobile Robots Based on Semantic Information. Electronics 2022, 11, 1136. [Google Scholar] [CrossRef]
- IFR. Service-Robots. Available online: https://ifr.org/service-robots (accessed on 28 June 2022).
- Graterol, W.; Diaz-Amado, J.; Cardinale, Y.; Dongo, I.; Lopes-Silva, E.; Santos-Libarino, C. Emotion Detection for Social Robots Based on NLP Transformers and an Emotion Ontology. Sensors 2021, 21, 1322. [Google Scholar] [CrossRef] [PubMed]
- Xiao, G.; Ma, Y.; Liu, C.; Jiang, D. A machine emotion transfer model for intelligent human-machine interaction based on group division. Mech. Syst. Signal Process. 2020, 142, 106736. [Google Scholar] [CrossRef]
- Su, Y. Ontology-Based Agent Emotion Recognition and Emotion Induction Research; Lanzhou University: Lanzhou, China, 2019. [Google Scholar]
- Wessman, A.E.; Ricks, D.F. Mood and Personality; Holt Rinehart and Winston: Oxford, UK, 1966; pp. 23–99. [Google Scholar]
- Russell, J.A. A circumplex model of affect. J. Personal. Soc. Psychol. 1980, 39, 1161–1178. [Google Scholar] [CrossRef]
- Miwa, H.; Takanobu, H.; Takanishi, A. Human-Like Head Robot WE-3RV for Emotional Human-Robot Interaction. In Romansy; Bianchi, G., Jean-Claude, G., Rzymkowski, R., Eds.; Springer: Vienna, Austria, 2002; Volume 14, pp. 519–526. [Google Scholar]
- Wu, W.; Li, H. Artificial emotion modeling and human-computer interaction experiment in PAD emotion space. J. Harbin Inst. Technol. 2019, 51, 29–37. [Google Scholar]
- Tian, Z.; Chen, X.; Jiang, D. An artificial emotion model based on mutual mapping between discrete states and latitude space. J. Syst. Simul. 2021, 33, 1062–1069. [Google Scholar]
- Chen, J.; Jiang, D. A machine-oriented framework for artificial emotion simulation. J. Shantou Univ. 2020, 35, 36–46. [Google Scholar]
- Bi, R. AI Literary Emotion Is a Kind of Artificial Emotion; Yangtze River Art and Literature Publishing House: Beijing, China, 2020; Volume 19, pp. 136–139. [Google Scholar]
- Jiang, H.; Xu, J.; Lin, S.; Yang, C.; Yang, W.; Guo, J. Minimal emotion expression for intelligent terminals. J. Comput. Aided Des. Comput. Graph. 2020, 32, 1042–1051. [Google Scholar]
- Niloy, M.A.; Shama, A.; Chakrabortty, R.K.; Ryan, M.J.; Badal, F.R.; Tasneem, Z.; Ahamed, H.; Moyeen, S.I.; Das, S.K.; Ali, F.; et al. Critical design and control issues of indoor autonomous mobile robots: A review. IEEE Access 2021, 9, 35338–35370. [Google Scholar] [CrossRef]
- Kruse, T.; Pandey, A.K.; Alami, R.; Kirsch, A. Human-Aware Robot Navigation: A Survey. Robot. Auton. Syst. 2013, 61, 1726–1743. [Google Scholar] [CrossRef] [Green Version]
- Charalampous, K.; Kostavelis, I.; Gasteratos, A. Recent trends in social aware robot navigation: A survey. Robot. Auton. Syst. 2017, 93, 85–104. [Google Scholar] [CrossRef]
- Möller, R.; Furnari, A.; Battiato, S.; Härmä, A.; Farinella, G.M. A survey on human-aware robot navigation. Robot. Auton. Syst. 2021, 145, 103837. [Google Scholar] [CrossRef]
- He, L.; Zhang, H.; Yuan, L.; Liu, Z.; Zhang, W.; Zhong, R.; Zhang, S. A review of social awareness navigation methods for service robots. Comput. Eng. Appl. 2022, 58, 1–11. [Google Scholar]
- Ferrer, G.; Garrell, A.; Sanfeliu, A. Social-Aware Robot Navigation in Urban Environments. In Proceedings of the European Conference on Mobile Robots, Catalonia, Spain, 25–27 September 2013; pp. 331–336. [Google Scholar]
- Malviya, A.; Kala, R. Social robot motion planning using contextual distances observed from 3D human motion tracking. Expert Syst. Appl. 2021, 184, 115515. [Google Scholar] [CrossRef]
- Pérez-Hurtado, I.; Orellana-Martín, D.; Martínez-del-Amor, M.Á.; Valencia-Cabrera, L. A membrane computing framework for social navigation in robotics. Comput. Electr. Eng. 2021, 95, 107408. [Google Scholar] [CrossRef]
- Wang, C.; Li, Y.; Ge, S.S.; Lee, T.H. Adaptive Control for Robot Navigation in Human Environments based on Social Force Model. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation(ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 5690–5695. [Google Scholar]
- Reddy, A.K.; Malviya, V.; Kala, R. Social cues in the autonomous navigation of indoor mobile robots. Int. J. Soc. Robot. 2021, 13, 1335–1358. [Google Scholar] [CrossRef]
- Kivrak, H.; Cakmak, F.; Kose, H.; Yavuz, S. Waypoint based path planner for socially aware robot navigation. Clust. Comput. 2022, 25, 1665–1675. [Google Scholar] [CrossRef]
- Repiso, E.; Zanlungo, F.; Kanda, T.; Garrell, A.; Sanfeliu, A. People’s v-Formation and Side-by-Side Model adapted to Accompany Groups of People by Social Robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS), Macau, China, 3–8 November 2019; pp. 2082–2088. [Google Scholar]
- Kivrak, H.; Cakmak, F.; Kose, H.; Yavuz, S. Social navigation framework for assistive robots in human inhabited unknown environments. Eng. Sci. Technol. 2021, 24, 284–298. [Google Scholar] [CrossRef]
- Patompak, P.; Jeong, S.; Chong, N.Y.; Nilkhamhang, I. Mobile Robot Navigation for Human-Robot Social Interaction. In Proceedings of the 16th International Conference on Control, Automation and Systems (ICCAS), Gyeongju, Korea, 16–19 October 2016; pp. 1298–1303. [Google Scholar]
- Truong, X.T.; Yoong, V.N.; Ngo, T.D. Socially aware robot navigation system in human interactive environments. Intell. Serv. Robot. 2017, 10, 287–295. [Google Scholar] [CrossRef]
- Yang, C.T.; Zhang, T.; Chen, L.P.; Fu, L.C. Socially-Aware Navigation of Omnidirectional Mobile Robot with Extended Social Force Model in Multi-Human Environment. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics(SMC), Bari, Italy, 6–9 October 2019; pp. 1963–1968. [Google Scholar]
- James, J.; Watson, C.I.; Macdonald, B. Artificial Empathy in Social Robots: An analysis of Emotions in Speech. In Proceedings of the 27th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Nanjing, China, 27–31 August 2018. [Google Scholar]
- Fung, P.; Bertero, D.; Wan, Y.; Dey, A.; Chan, R.H.Y.; Siddique, F.B.; Yang, Y.; Wu, C.; Lin, R. Towards Empathetic Human-Robot Interactions; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Chen, D.; Liu, Z.T. Multi-Objective Route Planning Based on Machine Emotion. In Proceedings of the 7th International Workshop on Advanced Computational Intelligence and Intelligent Informatics (IWACIII 2021), Beijing, China, 31 October–3 November 2021. [Google Scholar]
- Russell, J.A.; Mehrabian, A. Evidence for a three-factor theory of emotions. J. Res. Personal. 1977, 11, 273–294. [Google Scholar] [CrossRef]
- Mehrabian, A. Framework for a comprehensive description and measurement of emotional states. Genet. Soc. Gen. Psychol. Monogr. 1995, 121, 339–361. [Google Scholar]
- Alenzi, Z.; Alenzi, E.; Alqasir, M.; Alruwaili, M.; Alhmiedat, T.; Alia, O.M. A Semantic Classification Approach for Indoor Robot Navigation. Electronics 2022, 11, 2063. [Google Scholar] [CrossRef]
- Zhang, R. Human-Computer Communication Atmosphere Field Modeling Based on Fuzzy AHP and Its Application in Human-Computer Interaction System; China University of Geosciences: Wuhan, China, 2018. [Google Scholar]
- Liu, Z.T.; Wu, M.; Li, D.-Y.; Chen, L.-F.; Dong, F.-Y.; Yamazaki, Y.; Hirota, K. Concept of Fuzzy Atmosfield for Representing Communication Atmosphere and its Application to Humans-Robots Interaction. J. Adv. Comput. Intell. Intell. Inform. 2013, 17, 3–17. [Google Scholar] [CrossRef]
- Zhang, X. Development and application of Pepper robot intelligent interaction based on Choregraphe. Netw. Secur. Technol. Appl. 2020, 12, 55–57. [Google Scholar]
- Chen, B.; Lu, Z.; Zhou, Y.; Ye, Q. Indoor speech separation and sound source localization system based on dual microphones. Comput. Appl. 2018, 38, 3643–3648. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Emotion State | P | A |
|---|---|---|
| urgent | −0.95 | −0.32 |
| not urgent | 1.57 | −0.79 |
| pleasant | 2.77 | 1.21 |
| unpleasant | −1.60 | −0.80 |
| active | 1.72 | 1.71 |
| upset | −1.20 | 0.40 |
| Pepper | Specifications | |
|---|---|---|
| Size | 1200 mm × 425 mm × 485 mm | |
| Weight | 28 Kg | |
| Battery | Lithium batteries | |
| Capacity: 30.0 Ah/795 Wh | ||
| Run time: more than 12 h | ||
| Sensor | Head | Mic × 4, speaker × 2, 2 × 5 million pixel camera, 3D camera, etc. |
| Chest | Gyro sensor, inertial sensor | |
| Hand | Touch sensor × 2 | |
| Leg | Sonar sensor × 2, laser sensor × 6, infrared sensor × 2, omnidirectional wheel × 3, etc. | |
| Display | 10.1 inch touch display | |
| Platform | NAOqi OS | |
| Internet | Wi-Fi/Ethernet/Bluetooth | |
| Speed | Up to 3 km/h | |
| Climbing | Up to 1.5 cm | |
| Move | 20 degrees of freedom in total | |
| Head: 2, Arm: 2 × 5, Leg: 3, Hand: 2 | ||
| Current Point | Machine Emotion | Target Point |
|---|---|---|
| C | unpleasant | A |
| C | active | B |
| C | pleasant | D |
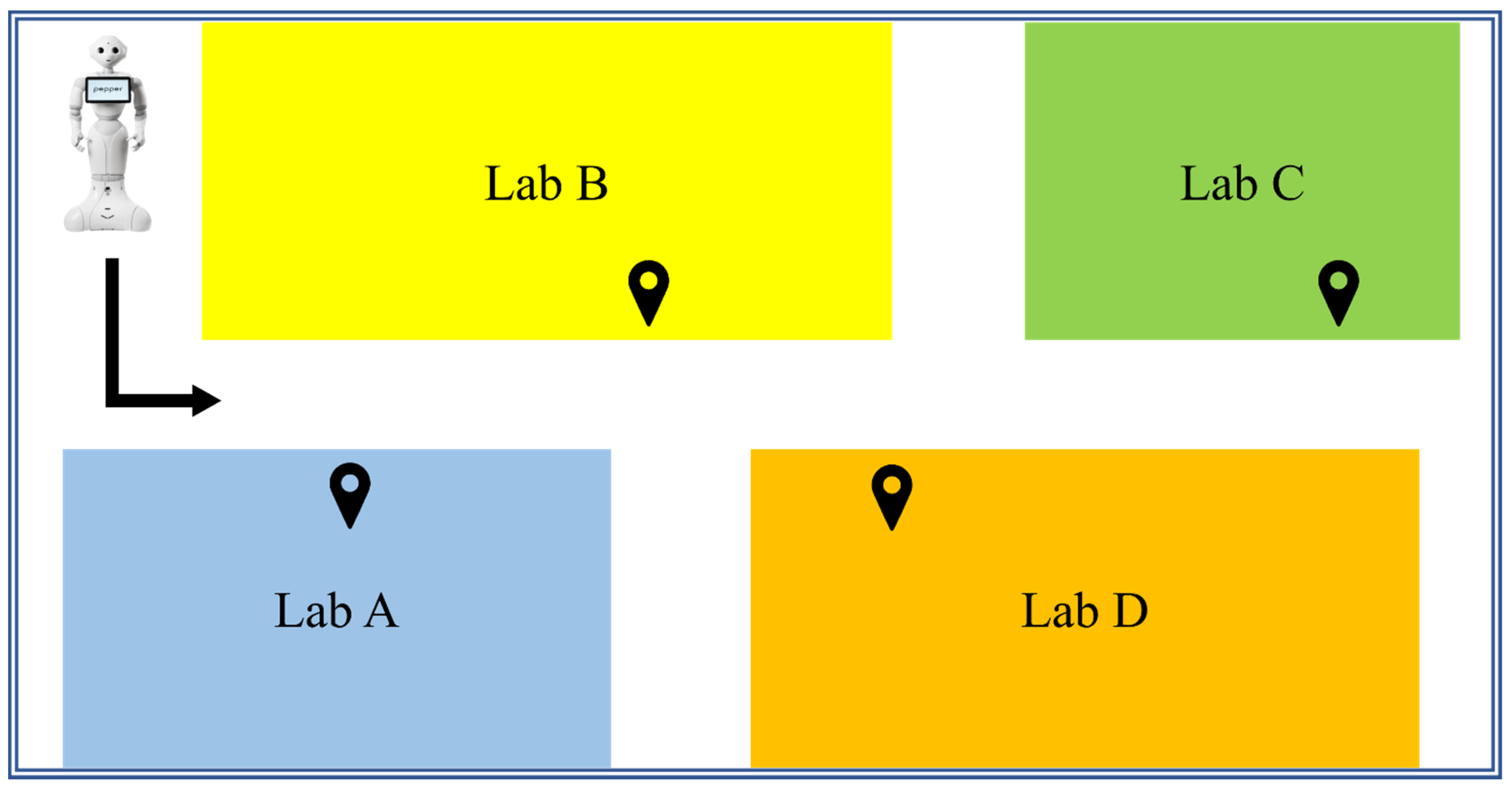
| Tour Point | Location | Relevance to Other Locations |
|---|---|---|
| Lab A | (8, 9) | B: middle; C: weak; D: weak |
| Lab B | (17, 9) | A: middle; C: weak; D: weak |
| Lab C | (13, 6) | A: weak; B: middle; D: strong |
| Lab D | (24, 6) | A: weak; B: middle; C: strong |
| Experimenter | Evaluation 1 | Evaluation 2 | Evaluation 3 | |
|---|---|---|---|---|
| Group 1 | 01 | 2 | 2 | 4 |
| 02 | 1 | 1 | 3 | |
| 03 | 1 | 1 | 3 | |
| 04 | 1 | 1 | 4 | |
| 05 | 1 | 1 | 2 | |
| 06 | 1 | 1 | 2 | |
| 07 | 2 | 1 | 3 | |
| 08 | 1 | 1 | 3 | |
| Average | 1.25 | 1.125 | 3 | |
| Group 2 | 09 | 3 | 3 | 4 |
| 10 | 4 | 3 | 3 | |
| 11 | 4 | 4 | 4 | |
| 12 | 5 | 4 | 5 | |
| 13 | 4 | 3 | 3 | |
| 14 | 4 | 4 | 4 | |
| 15 | 4 | 4 | 4 | |
| 16 | 5 | 5 | 4 | |
| Average | 4.125 | 3.75 | 3.875 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, D.; Ge, Y. Multi-Objective Navigation Strategy for Guide Robot Based on Machine Emotion. Electronics 2022, 11, 2482. https://doi.org/10.3390/electronics11162482
Chen D, Ge Y. Multi-Objective Navigation Strategy for Guide Robot Based on Machine Emotion. Electronics. 2022; 11(16):2482. https://doi.org/10.3390/electronics11162482
Chicago/Turabian StyleChen, Dan, and Yuncong Ge. 2022. "Multi-Objective Navigation Strategy for Guide Robot Based on Machine Emotion" Electronics 11, no. 16: 2482. https://doi.org/10.3390/electronics11162482