

AFB-GPSR: Adaptive Beaconing Strategy Based on Fuzzy Logic Scheme for Geographical Routing in a Mobile Ad Hoc Network (MANET)


Abstract
:
1. Introduction
- (i)
- High and rapid node mobility issues have substantial effects on the efficiency of routing algorithms; thus, the mobility increases the changes in the network topology, causing connection failure and increasing the re-initiation of the route-discovery operation.
- (ii)
- Medium Access Control (MAC) issues are responsible for node access to the shared medium and related to node mobility, Quality of Service (QoS), bandwidth, synchronization, hidden terminals, and exposed terminal problems.
- (iii)
- Scalability refers to the capacity of the routing protocol to expand the network with a large node density without causing any disruption or failure in data transmission or traffic loading.
- (iv)
- Energy consumption is another significant challenge when the devices are equipped with a limited-lifetime battery. Therefore, energy management for transferring information has to be minimized in ad hoc networks.
- (v)
- Security is a critical issue in data forwarding for randomly distributed nodes, where the data packets are more vulnerable to attacks due to the absence of centralized control.
- (vi)
- Furthermore, packet collision, resource constraints, interference, and packet loss are other significant challenges that MANET routing has faced.
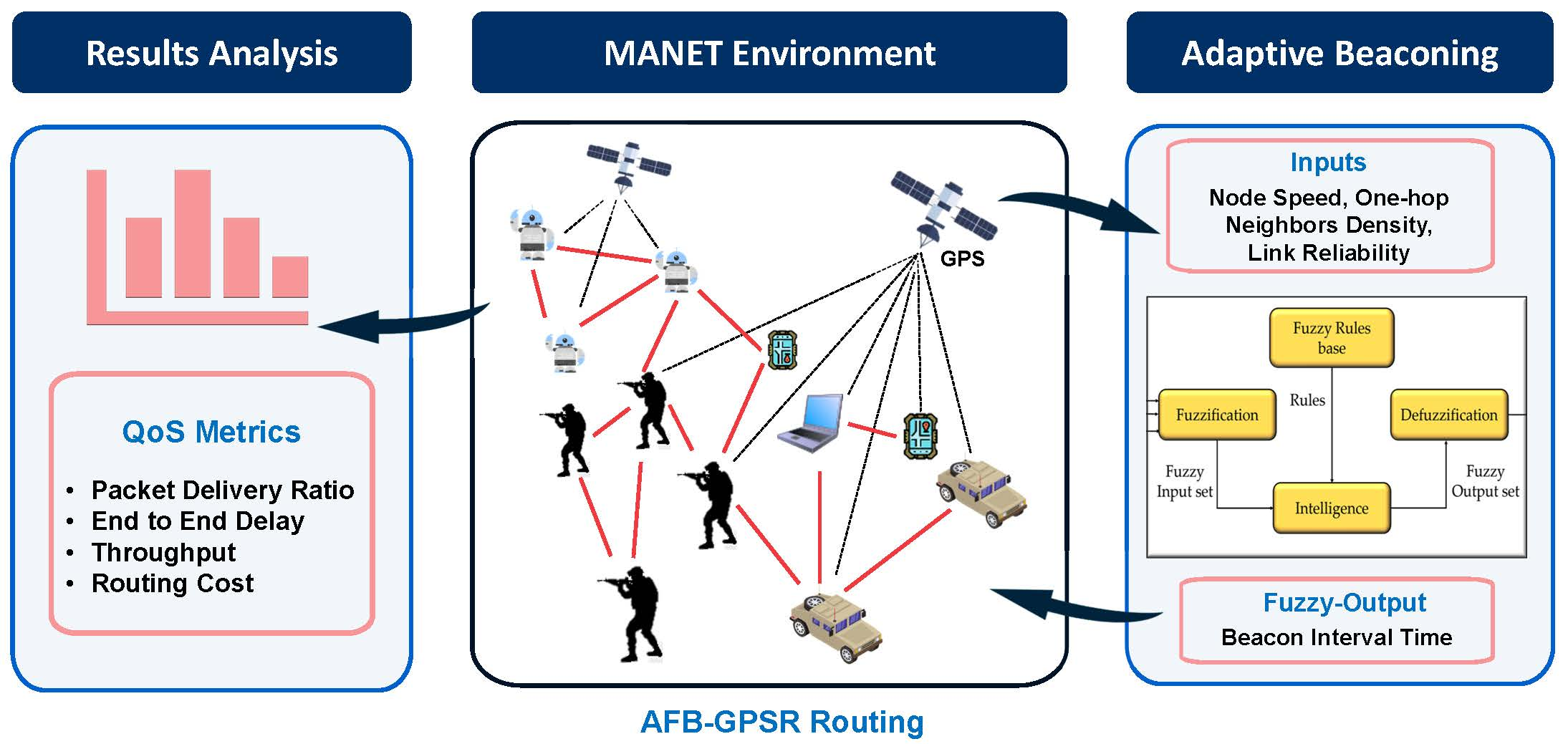
- An adaptive geographic routing protocol, namely AFB-GPSR, is proposed. To achieve this, an adaptive beaconing strategy based on fuzzy logic (AFB) is designed to optimize the update beacon intervals and improve the routing performance.
- The optimal beacon interval time (OBIT) is adjusted dynamically with the variations of three key network parameters: mobility of nodes, one-hop neighbors’ density, and link quality of the nodes.
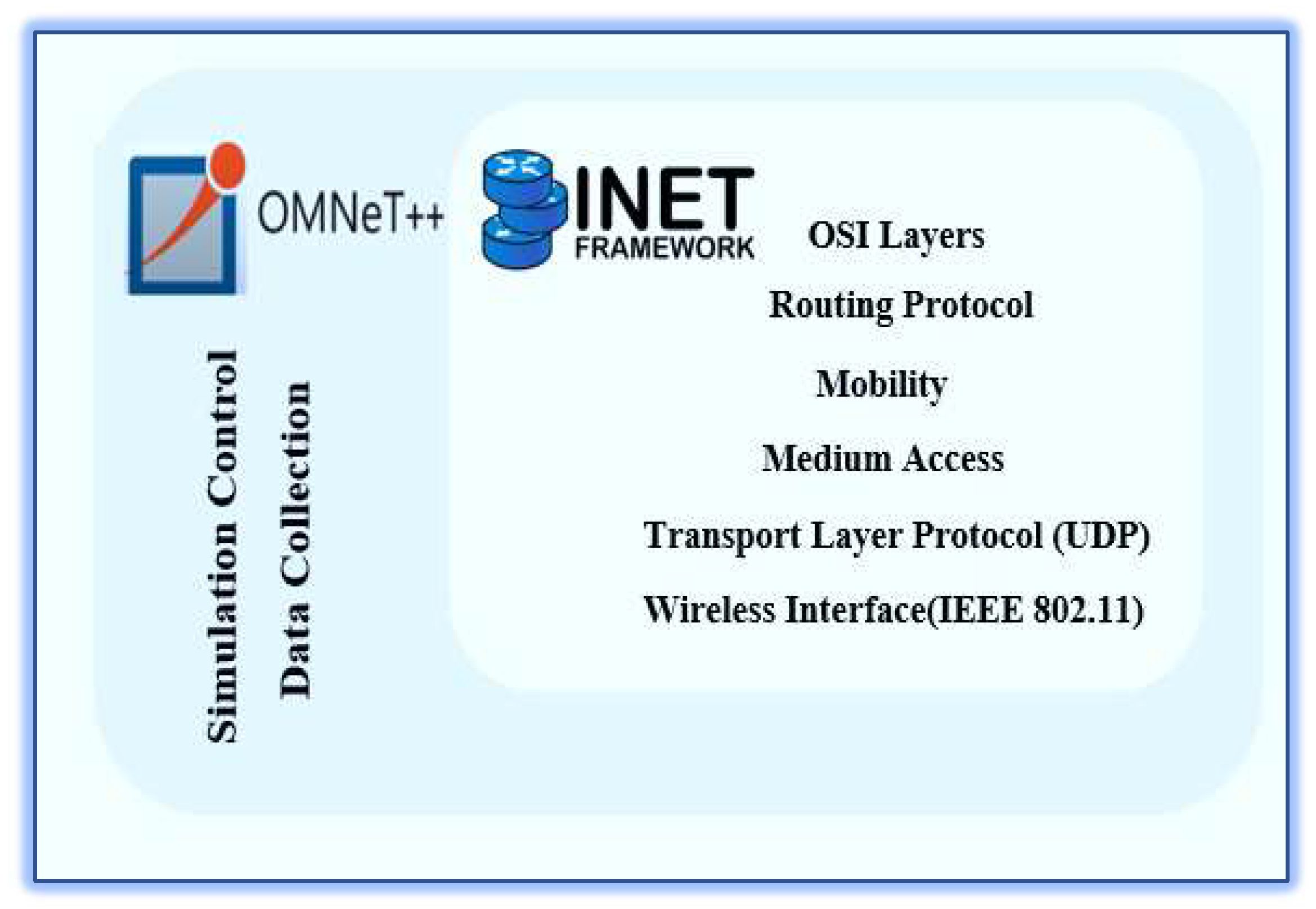
- Extensive simulations are carried out using OMNeT++ jointly with the INET framework to verify the AFB strategy with GPSR routing protocol. The results show that the AFB strategy reduces the routing cost and improves network reliability in terms of the packet-delivery ratio, throughput, normalized routing load and delay in comparison to traditional AODV and GPSR routing protocols.
- Moreover, the AFB-GPSR protocol exhibits good performance versus the state-of-the-art protocols in MANET environment.
- In conclusion, the AFB strategy is an effective solution in broadcasting beacons for geographical routing as it can maintain more information accuracy in the local topology.
2. Classifications of Routing Protocols: Overview
3. Literature Review
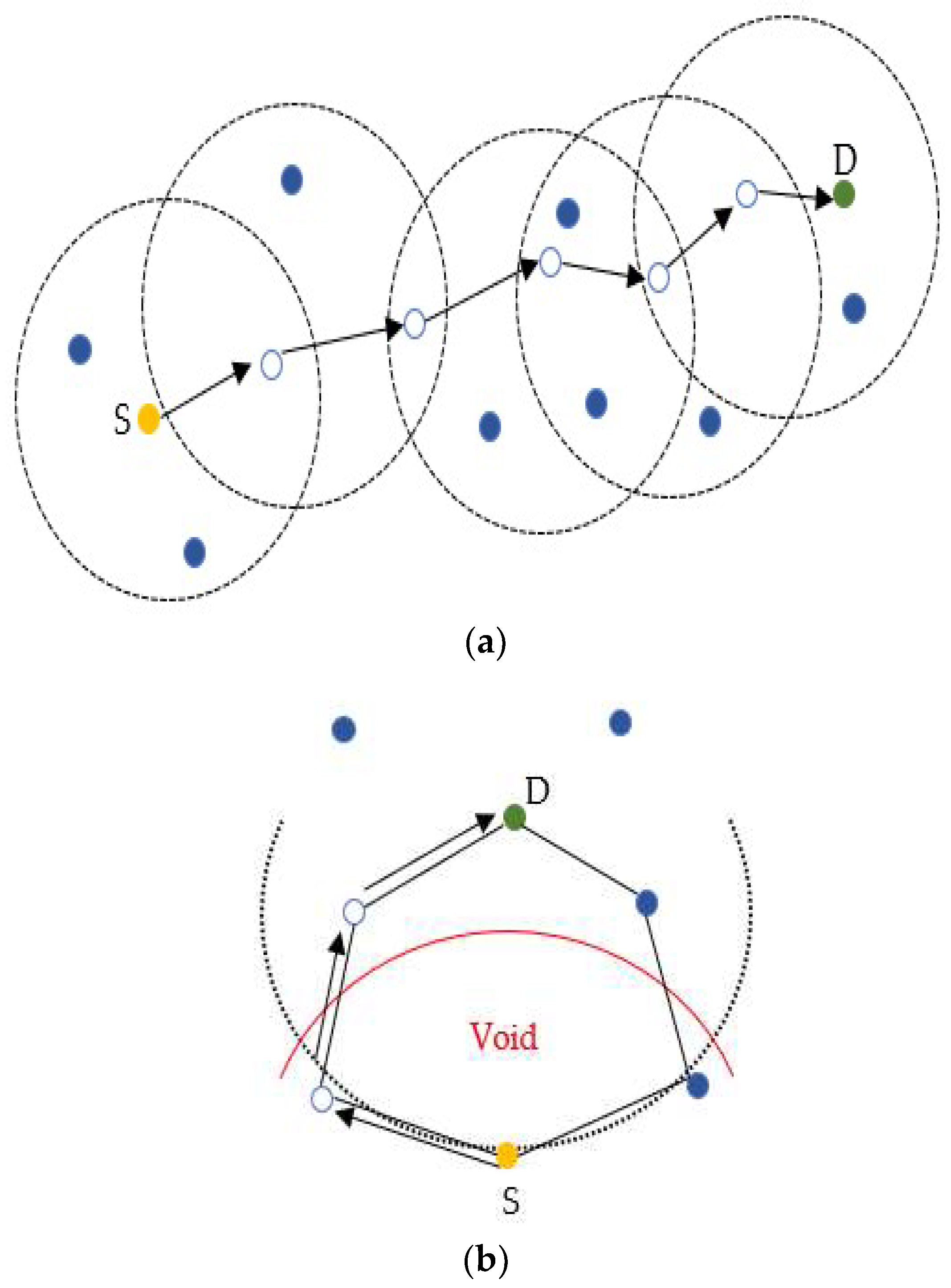
4. GPSR Routing Mechanism
4.1. Beaconing Approaches: Overview
- (1)
- There is no acknowledgment system for the short beacon message to let the sender know when it is successfully received.
- (2)
- A request to send/clear to transmit (RTS/CTS), a handshaking mechanism, is not employed prior to beacon transmission in order to prevent beacon broadcast collisions at the MAC layer.
- (3)
- The fixed contention window (CW) may increase the chances of collision and degrade the performance of beacon broadcast.
- Periodic Beaconing: Nodes send beacons at regular intervals. For instance, this method can be utilized in topological routing such as DSDV (Destination-Sequenced Distance Vector) and AODV (Ad hoc On-Demand Distance Vector) algorithms.
- Adaptive Beaconing: Beaconing intervals are constantly modified according to the network traffic load, connection quality, or mobility patterns.
- Beaconing triggered by events: Nodes transmit beacons in response to certain events or triggers (substantial change in their network state).
- Geographic Beaconing: Nodes use their geographical position to determine when and to whom beacons should be sent.
4.2. Beaconing Interval Time
5. The Proposed AFB-GPSR Strategy
- (1)
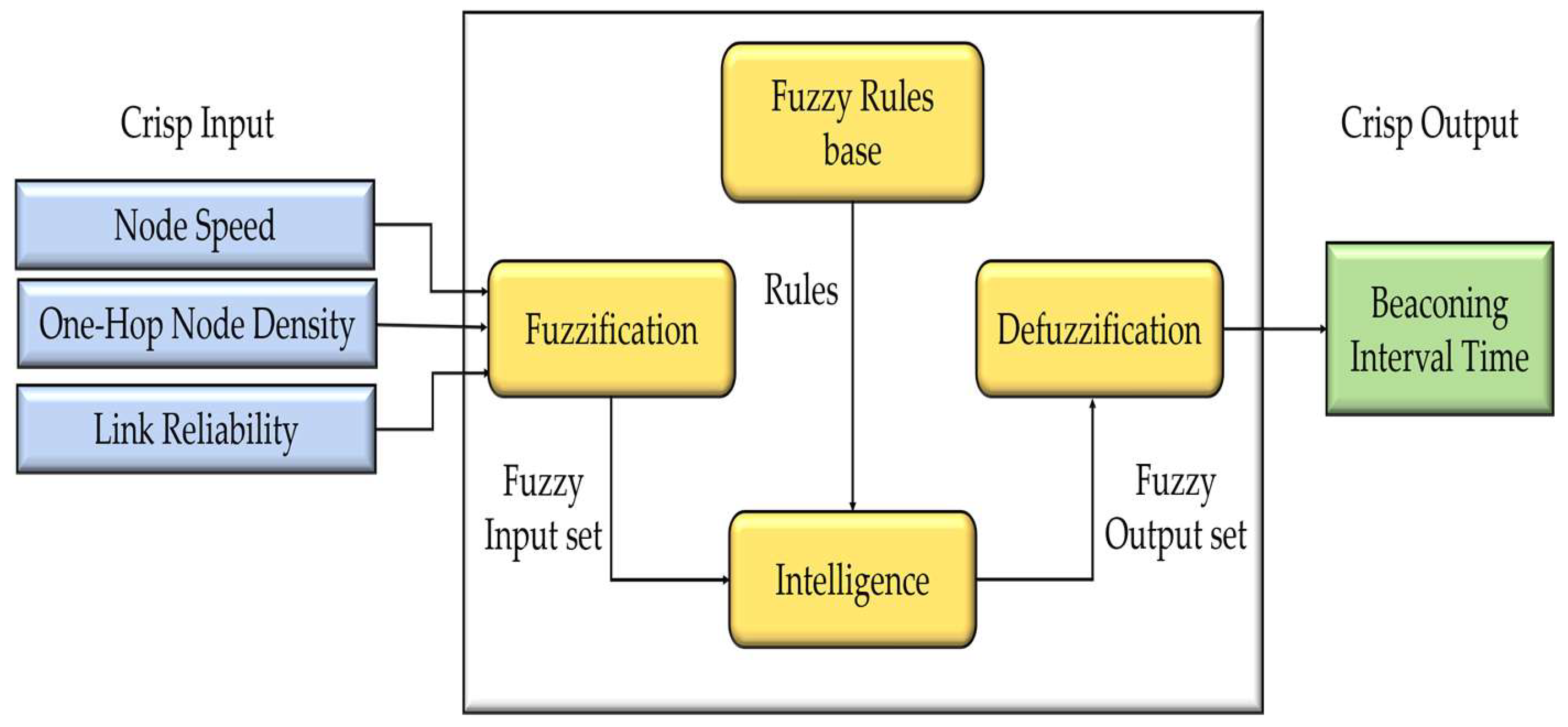
- Fuzzification module—The system’s crisp values are converted into fuzzy sets utilizing fuzzy linguistic variables and terms, as well as membership functions.
- (2)
- Knowledge base—contains expert-provided IF–THEN rules.
- (3)
- Inference engine—performs fuzzy inference on inputs using IF–THEN rules from the knowledge base.
- (4)
- Defuzzification module—converts the inference engine’s fuzzy set into a crisp value.
- (i)
- The node speed (NS) of the current sender, regarded as the main cause of link failure;
- (ii)
- The one-hop neighbors’ density (OHND), which affects the availability of next-hop resources; and
- (iii)
- The link reliability (LR) between the sender and its neighbors.
5.1. AFB-GPSR Architecture
- Nodes are positioned randomly in an unimpeded area;
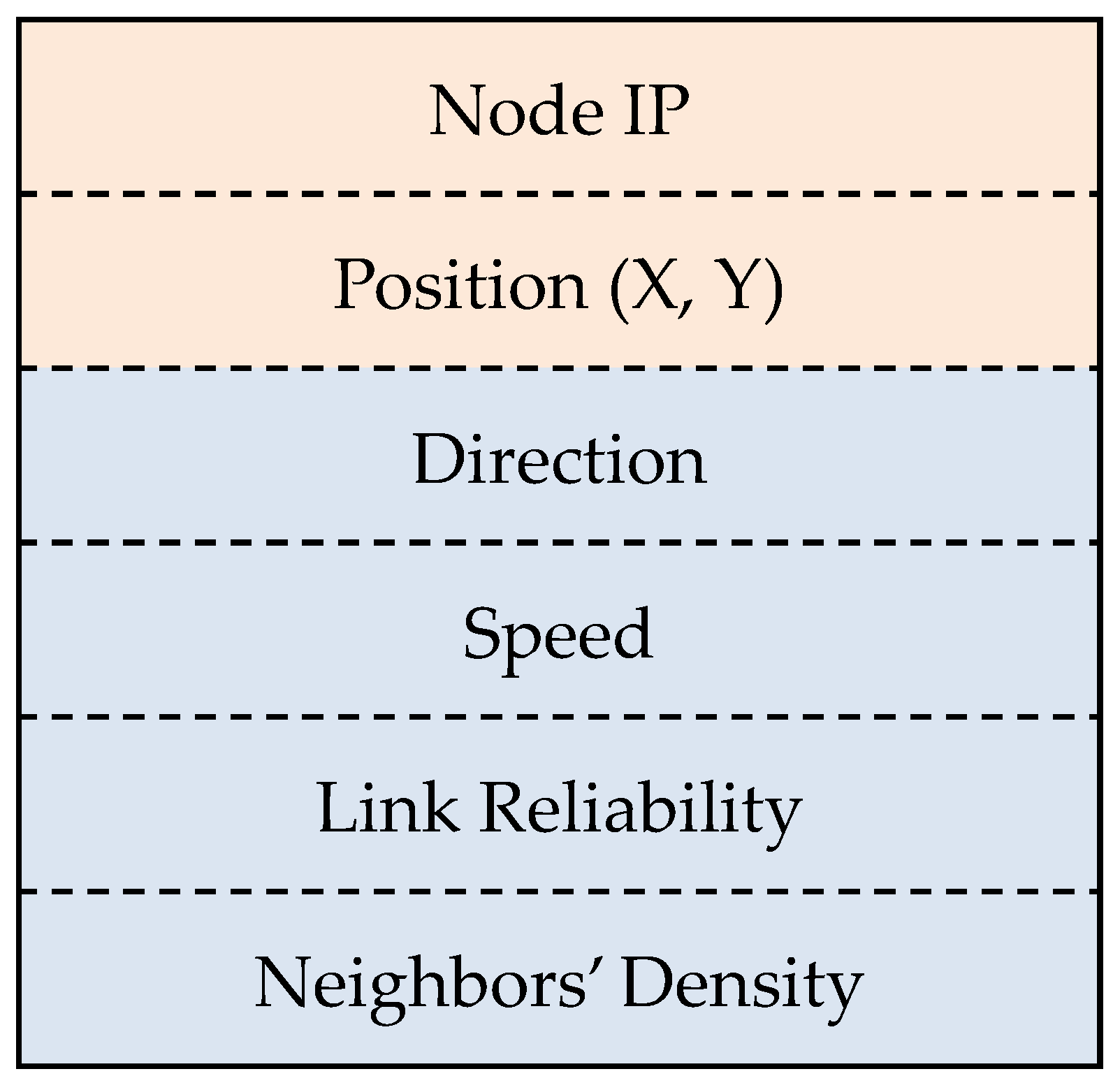
- Each node is aware of its own geographical coordinates (position), IP address, speed, and direction;
- Each node has the same transmission range and starts with an initial beacon interval for sharing information;
- Once the node receives beacon packets from its neighbor nodes in the coverage area, it can obtain the neighbor information list and calculate one-hop neighbors’ density and link reliability;
- The fuzzy logic model is triggered to calculate a new optimal beaconing interval time (OBIT) based on the three network parameters defined as NS, OHND, and LR;
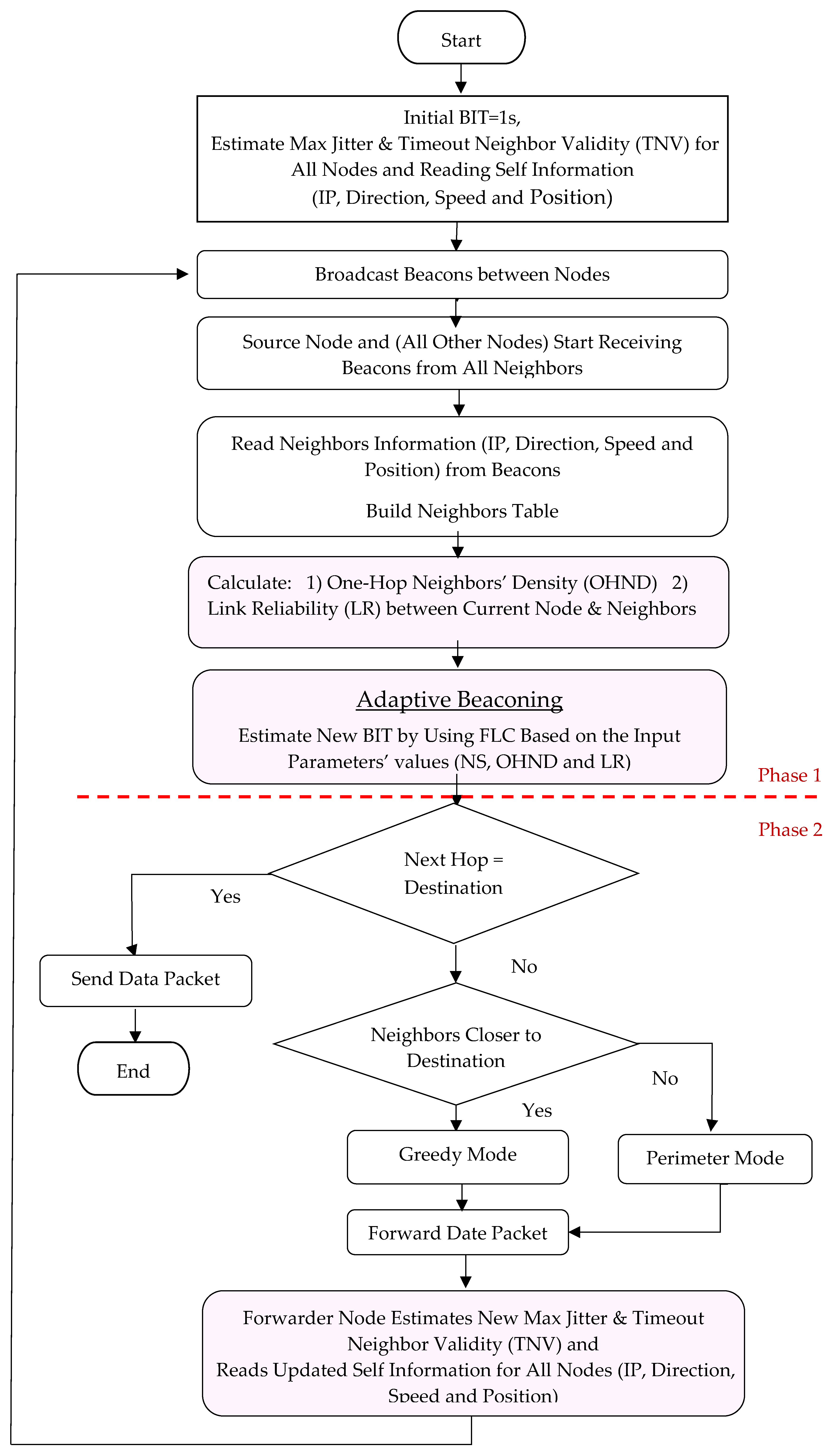
- Finally, the AFB-GPSR protocol can find the optimal next-hop route decision through the new beaconing interval time jointly with the original GPSR protocol to establish the routes using the GF (greedy forwarding) mode or perimeter mode.
| Algorithm 1. AFB-GPSR Mechanism |
| Input: Destination IP, Source IP Output: BIT //BIT = Beacon Interval Time, Initialize BIT = 1 //Start with initial value BIT = 1 s Phase1: Beaconing Phase For each node N do 1. Read self-address 2. Read self-position coordinates 3. Read self-speed 4. Read self-direction 5. End For 6. Broadcast Beacons 7. Update neighbors’ tables information based on neighbor node (Nn) beacons’ information 8. Estimate node speed (NS) 9. Estimate one-hop neighbors’ density (OHND) 10.Estimate link reliability (LR) 11. Evaluate a new BIT based on FLC inputs (Self-Speed, OHND and LR) Phase2: Routing Phase 12. If Nn is the destination Then, Send the data packet 13. Elseif Nn the closest node to the destination Then, Switch to Greedy mode 14. Else Switch to Perimeter mode 15. Forward the data packet 16. Update Self Table information (Address, Location, Speed and Direction) 17. Broadcast Beacons based on new FLC output BIT 18. Repeat Phase 1 and Phase 2 until Data Packet reach the destination |
5.2. Fuzzy Logic Composition
- One-hop neighbors’ density (OHND): The density of neighbors is determined by setting a counter for one-hop nodes that travel in the same direction as the source node, which is calculated as per (3). And the difference between the current source node angle and the neighbor angle is less than 45 degrees to be considered in the counter, where the neighbor recognized as per (3),
- Link reliability (LR): Link reliability has a significant impact on the network’s performance in terms of the link quality metric ETX [41,58]. The establishment of communication links between nodes is influenced by changes in the network topology, and these communication links may fail due to link failures. Hence, link reliability is described as per Equation (4).
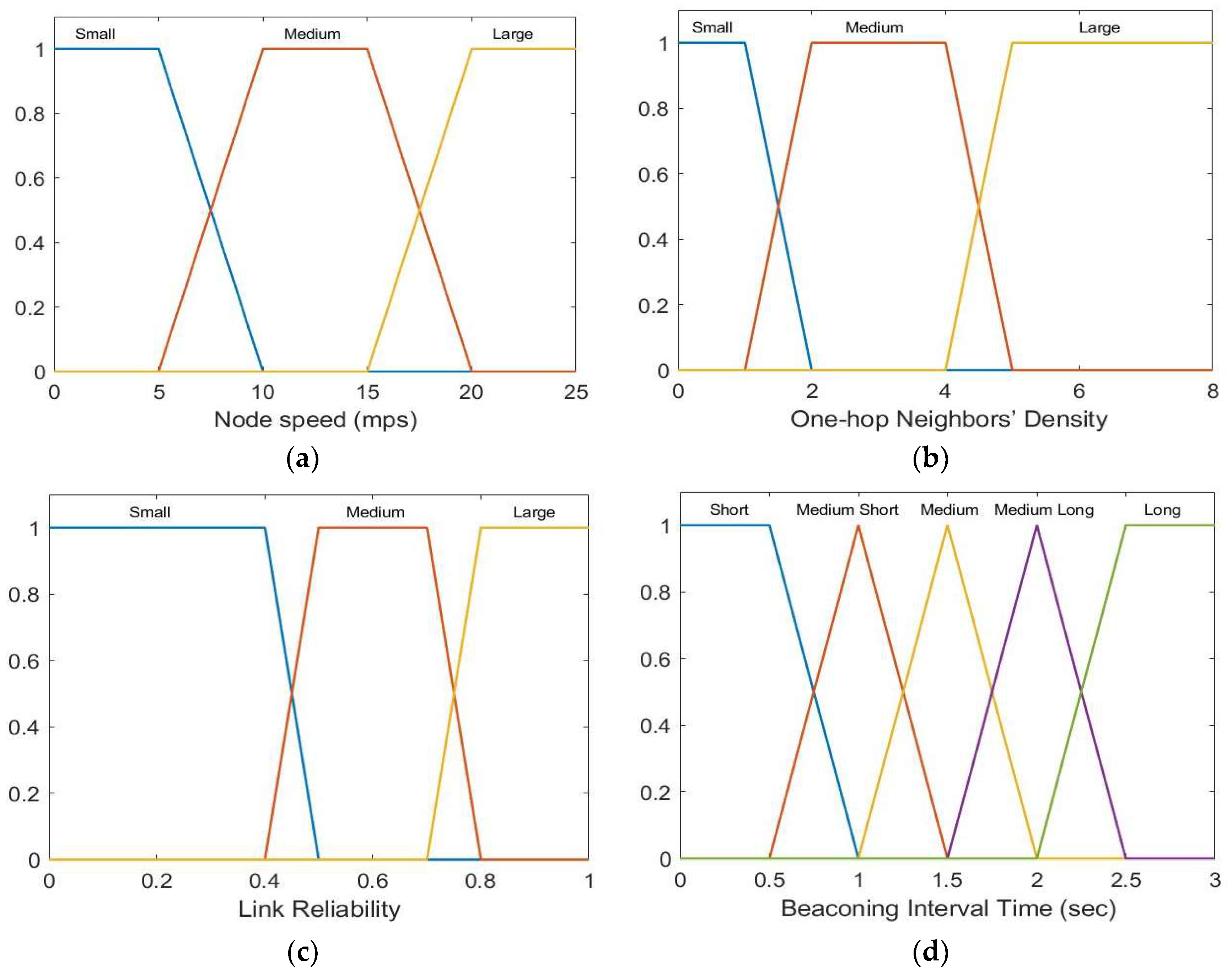
5.2.1. Fuzzification
5.2.2. Rules and Intelligent Decisions
5.2.3. Defuzzification
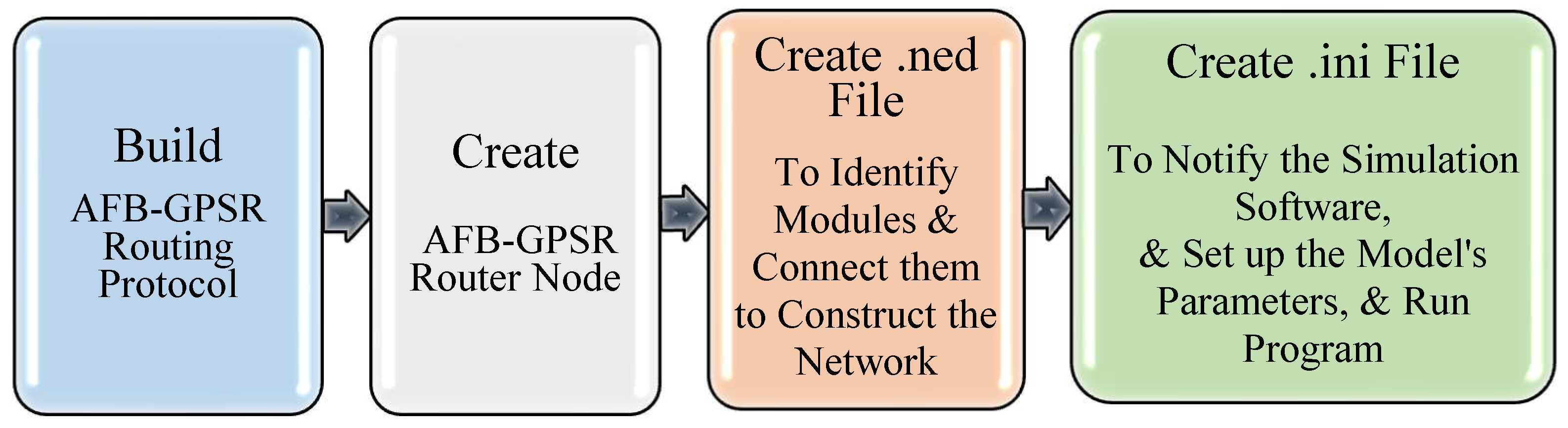
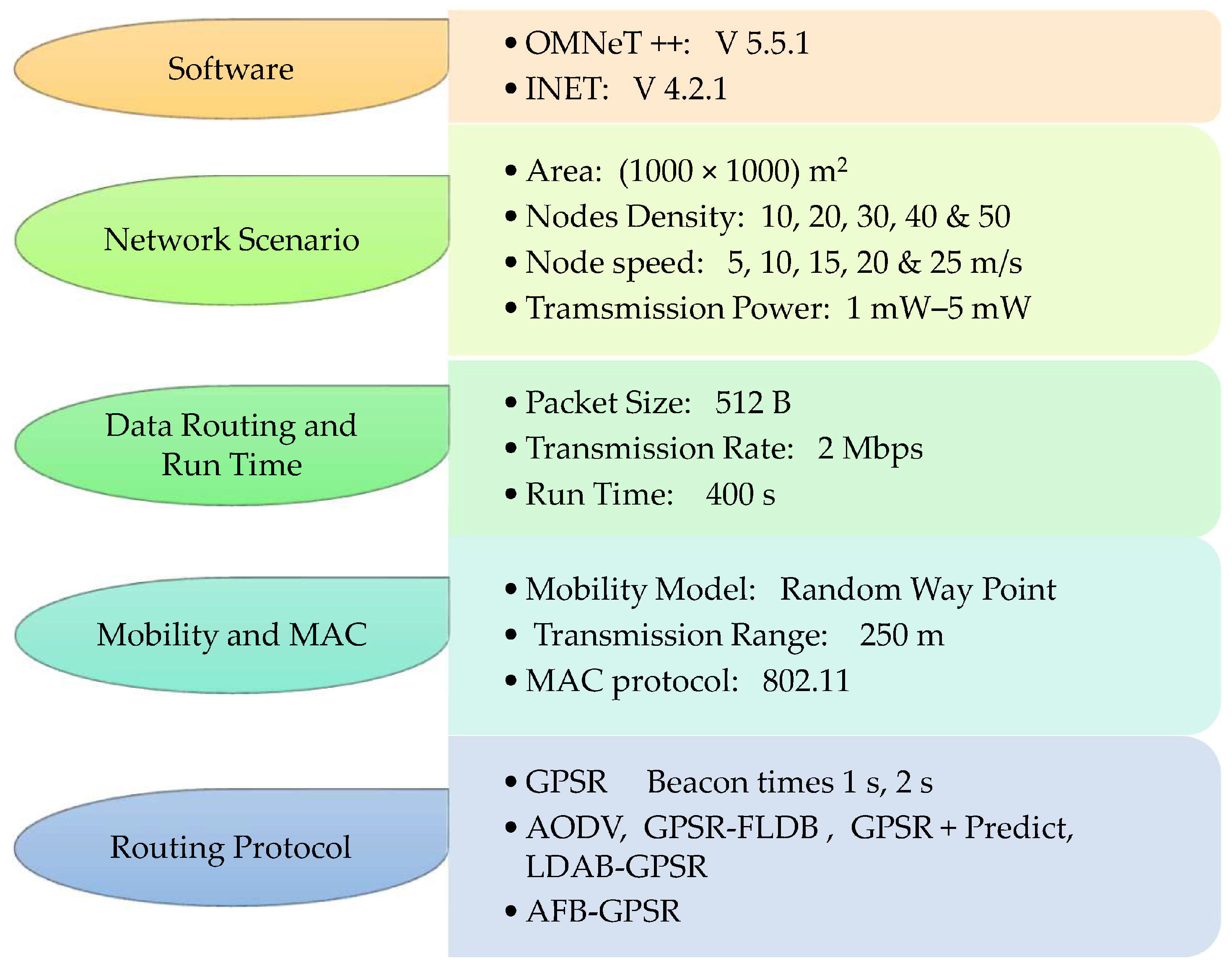
6. Simulation Setup
6.1. Simulation Methodology
6.2. Performance Metrics
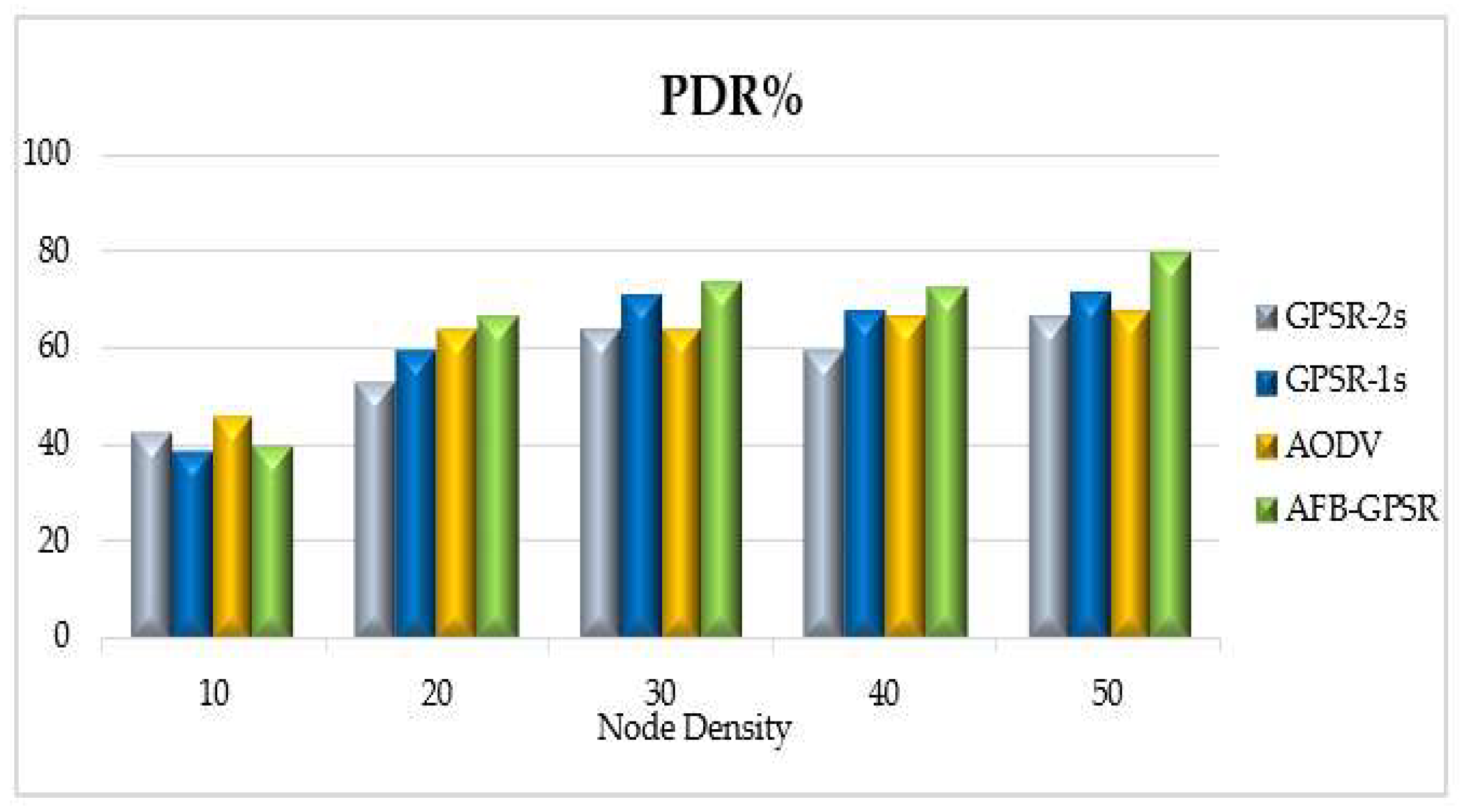
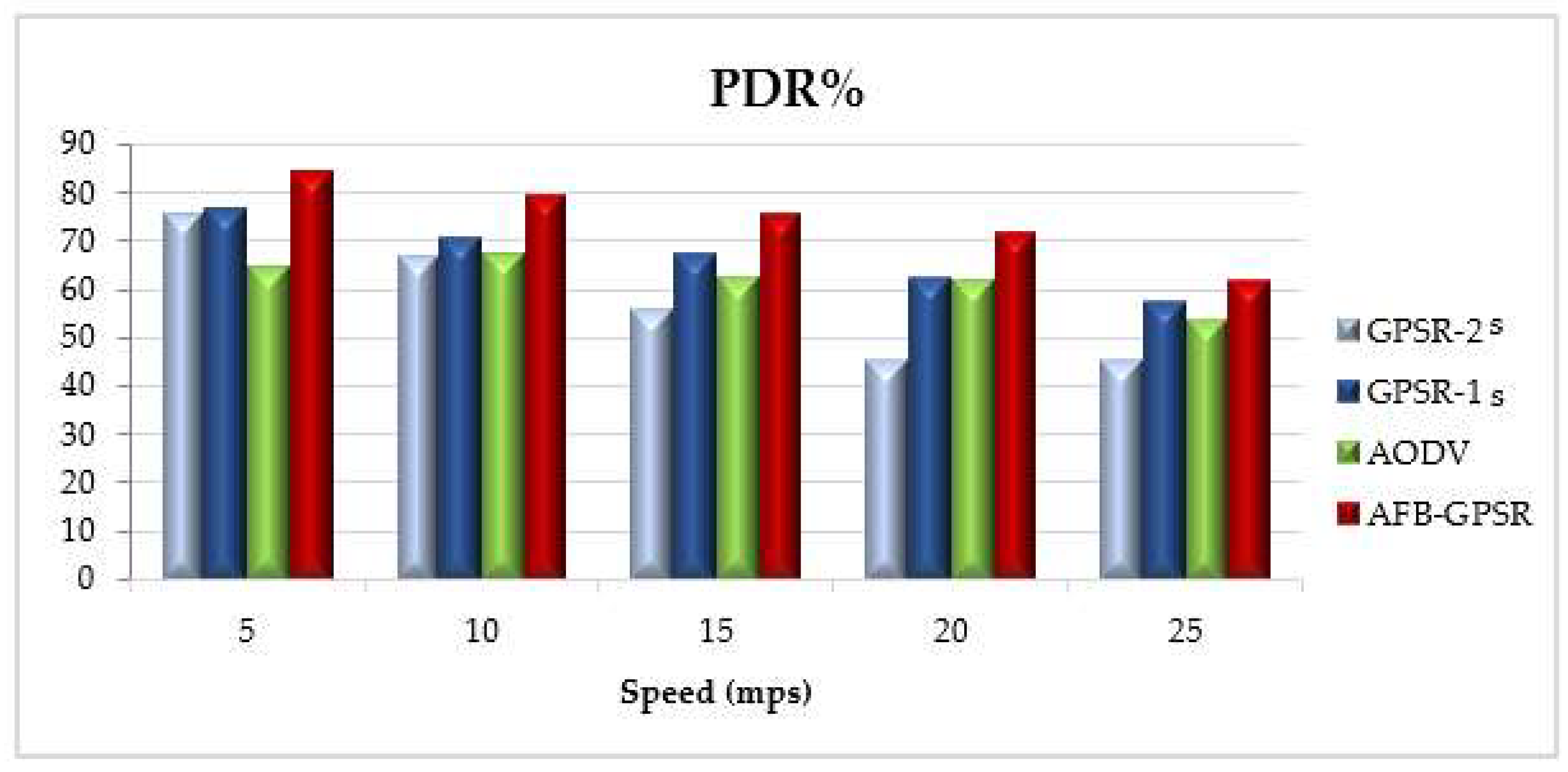
- PDR: This refers to the ratio of packets successfully received by the destination to the total number of packets delivered from the source;
- 2.
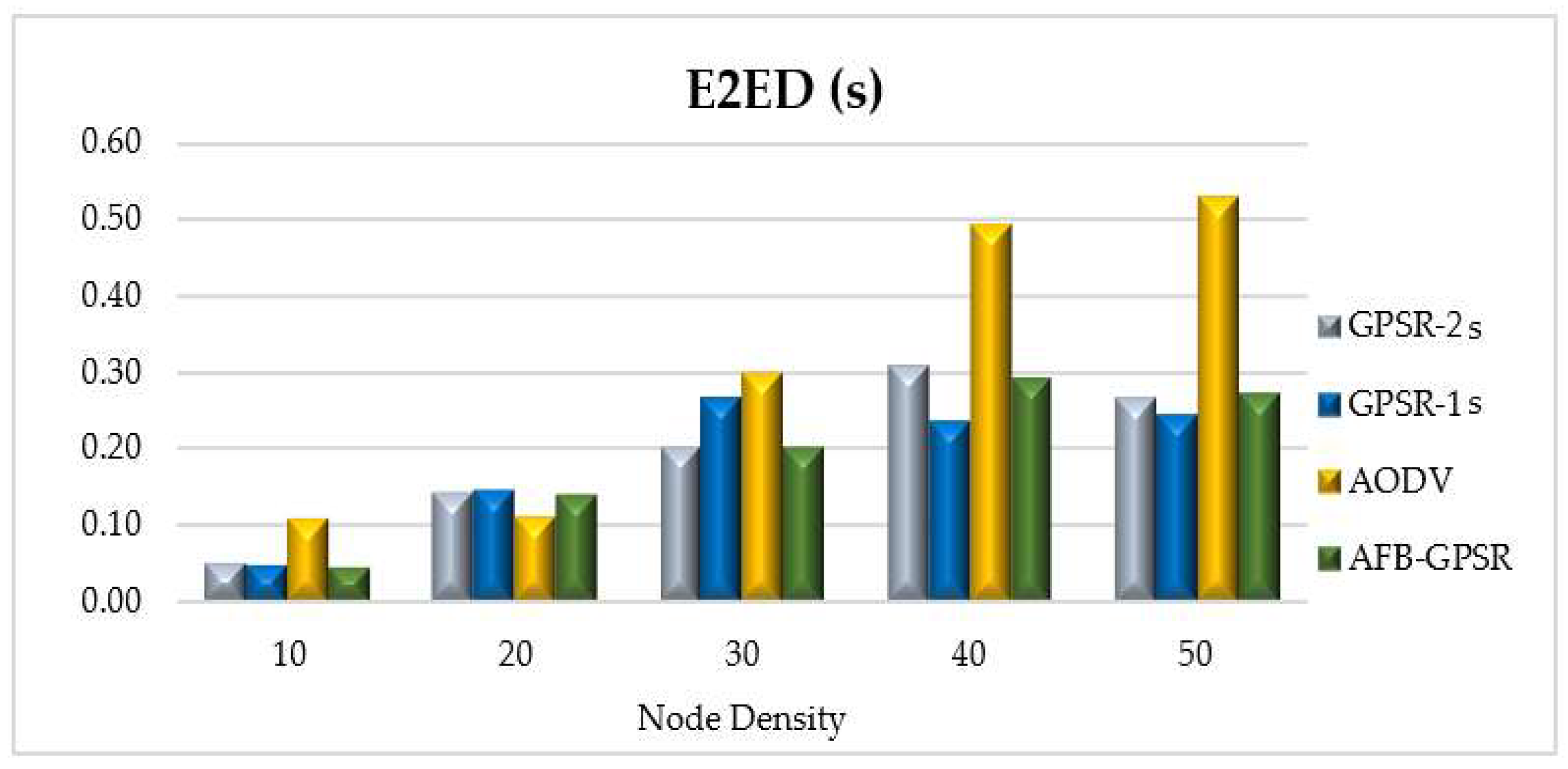
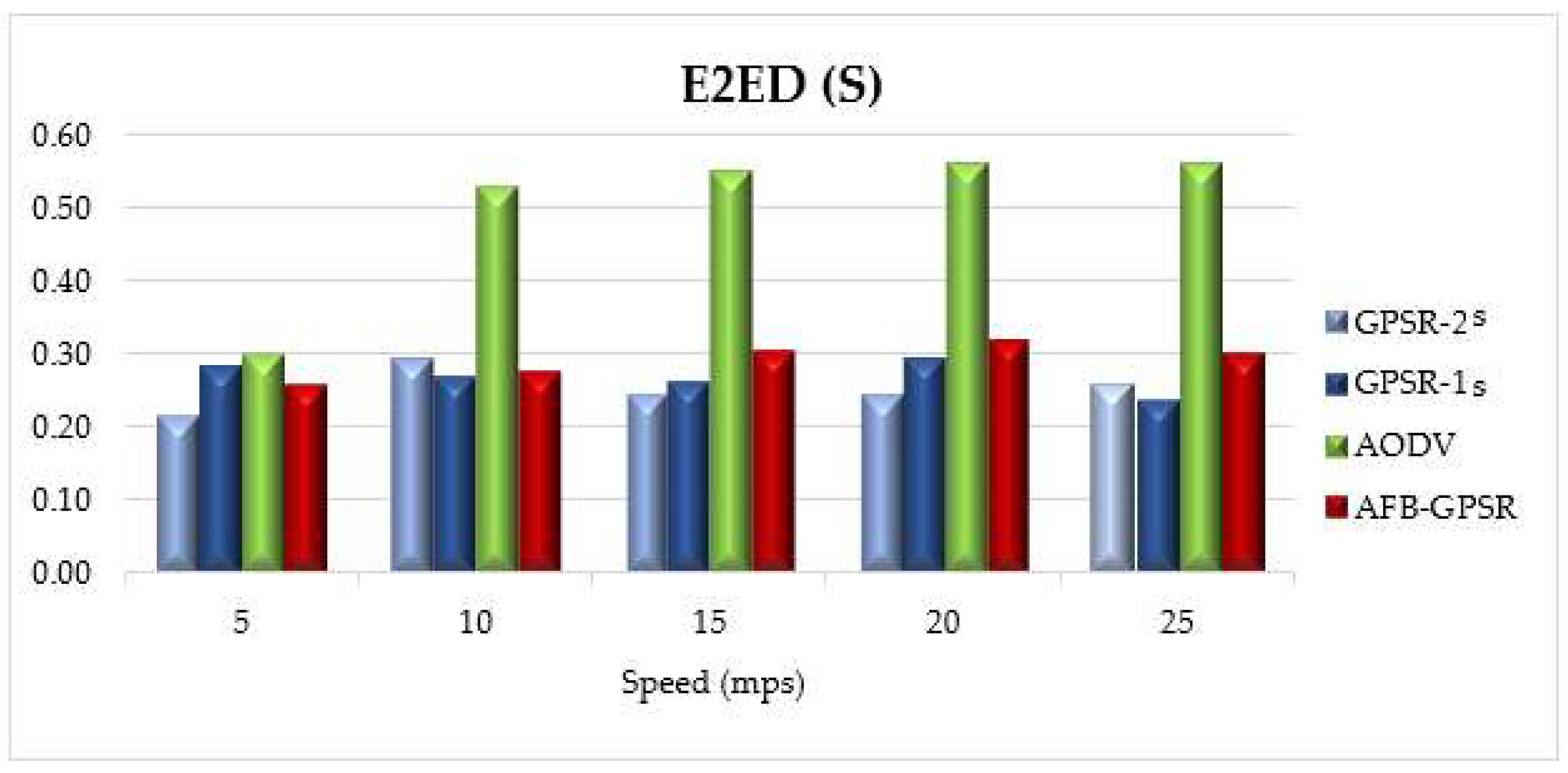
- E2ED: This is the period of time occupied by a packet traveling from the source until it is successfully received by the destination;
- 3.
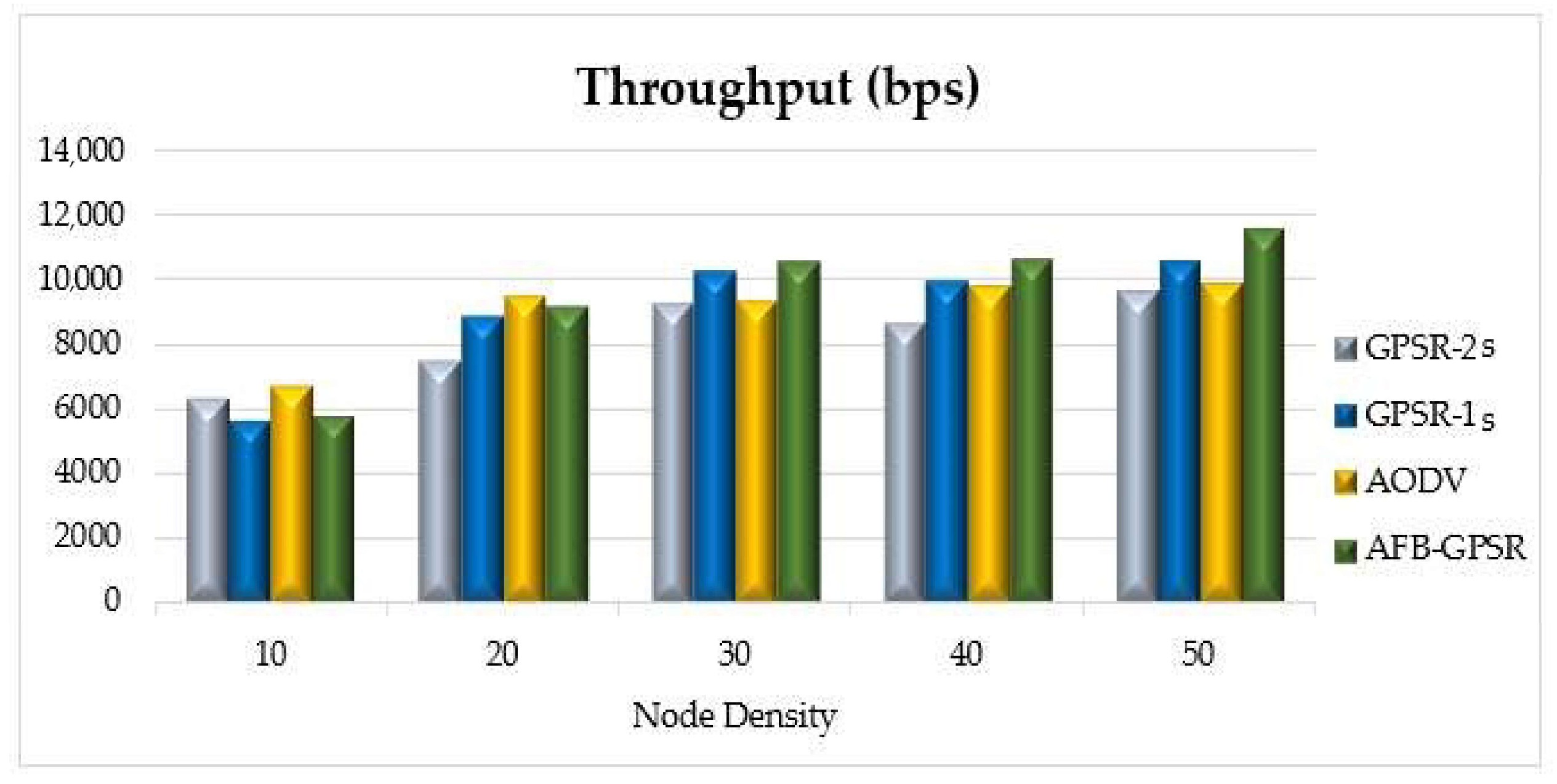
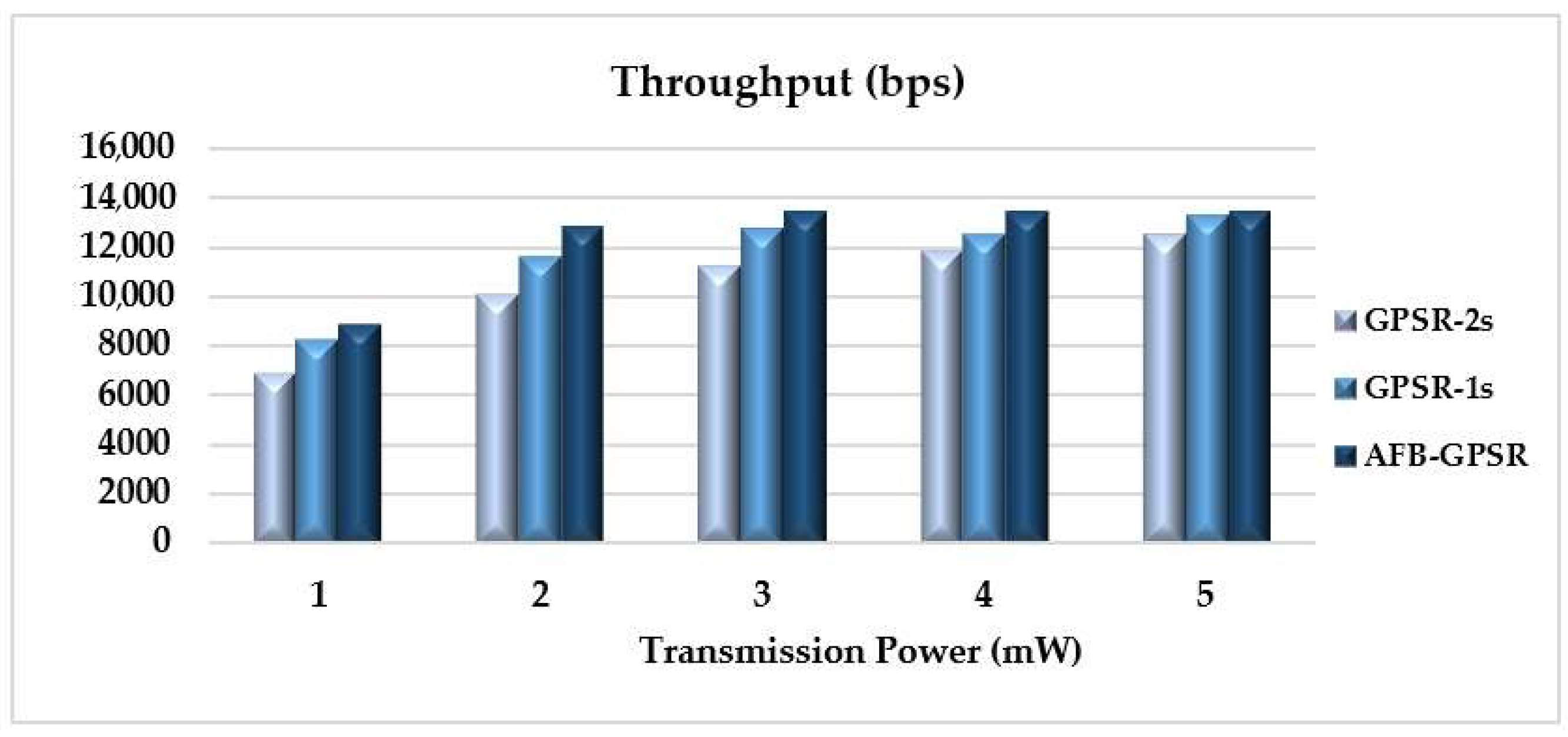
- Throughput (bps): This is expressed as the number of bits received successfully by the destination over a specified time period. In the case of the GPSR routing protocol, control overhead includes the total number of transmitted beacon packets.
- 4.
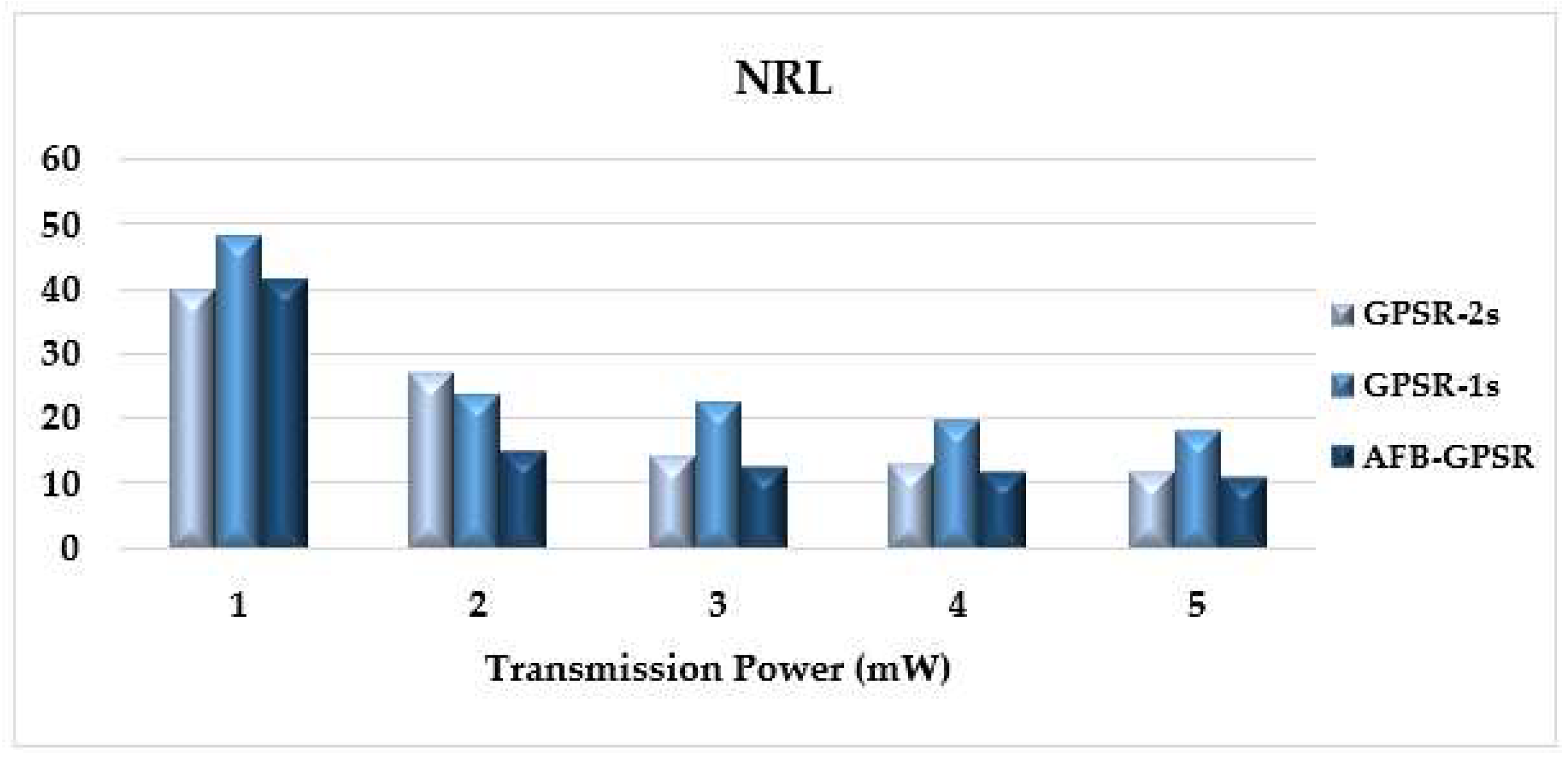
- Normalized Routing Load (NRL): It denotes the percentage of all routing control packets sent by all nodes divided by the number of data packets received at the destination:
7. Simulation Results and Discussion
- A.
- Experimental Scenario (1): The Impact of Node Density
- B.
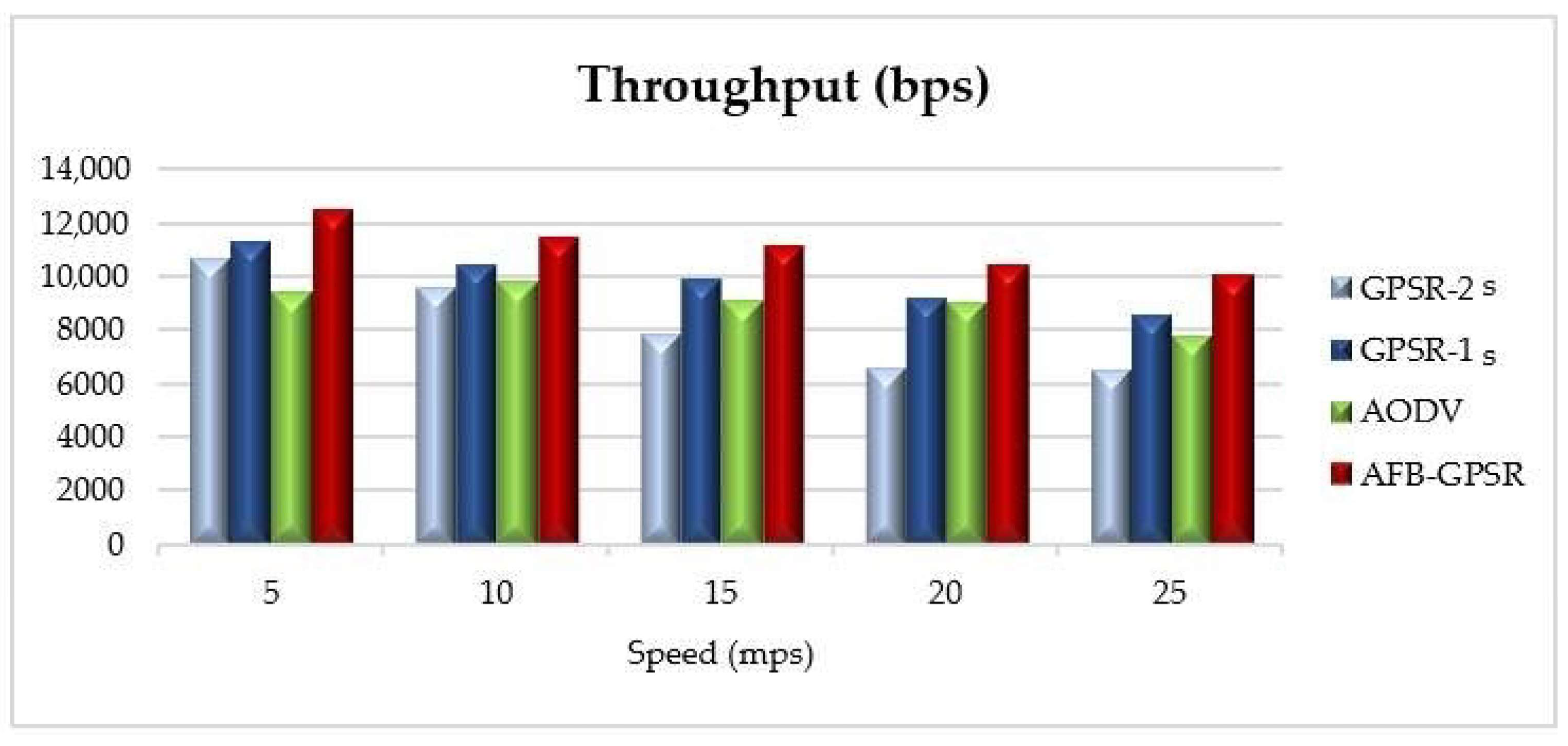
- Experimental Scenario (2): The Impact of Mobility Speed
- C.
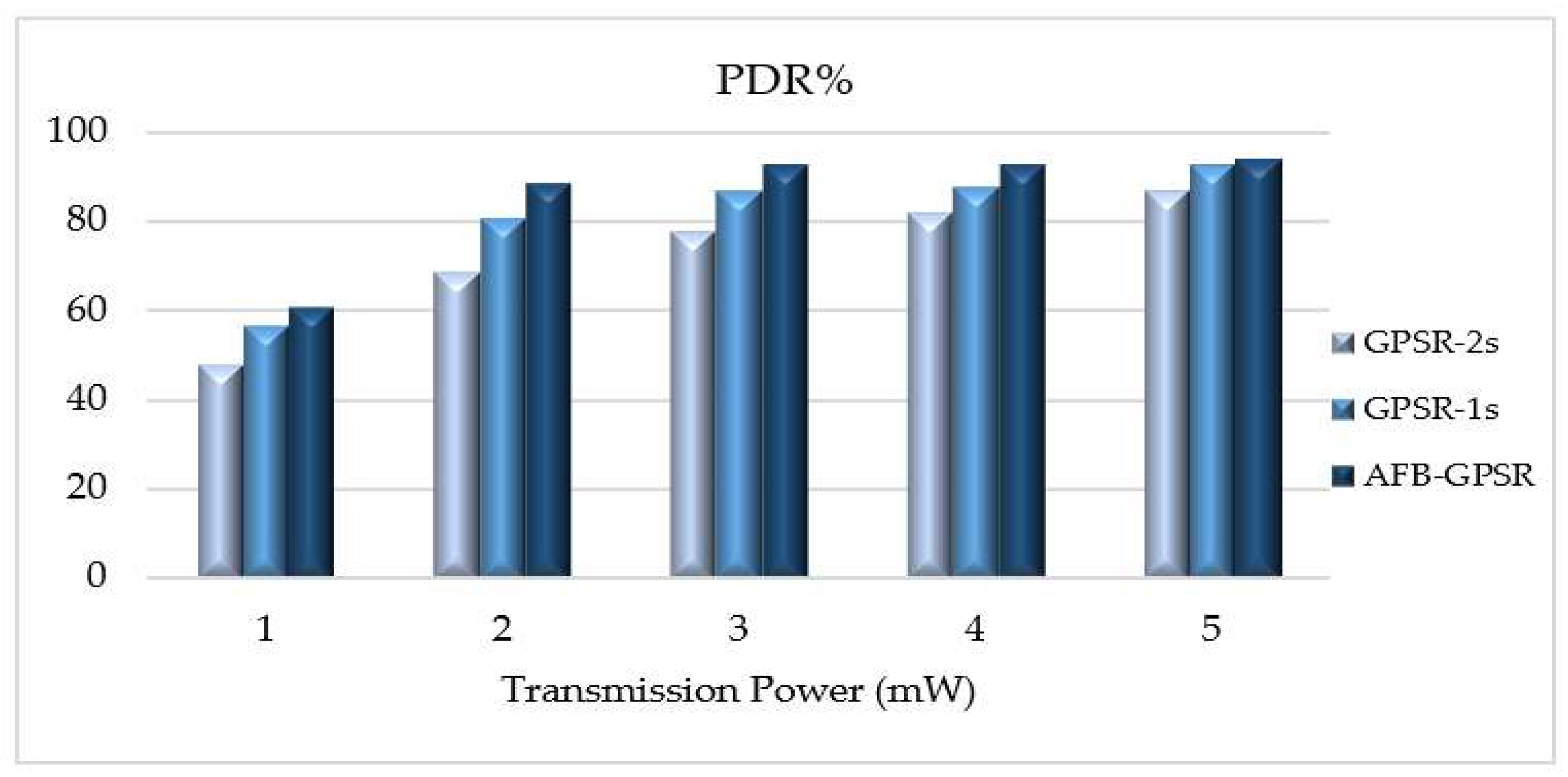
- Experimental Scenario (3): The Impact of Transmission Power
8. Performance Comparison with Related Protocols
9. Conclusions and Perspectives
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
References
- Al-Absi, M.A.; Al-Absi, A.A.; Sain, M.; Lee, H. Moving Ad Hoc Networks—A Comparative Study. Sustainability 2021, 13, 6187. [Google Scholar] [CrossRef]
- Quy, V.K.; Han, N.D.; Linh, D.M.; Ngoc, L.A. A Novel Method to Improve Performance of Major Nodes in Military MANET. IAENG Int. J. Comput. Sci. 2021, 48, 776–781. [Google Scholar]
- Lansky, J.; Ali, S.; Rahmani, A.M.; Yousefpoor, M.S.; Yousefpoor, E.; Khan, F.; Hosseinzadeh, M. Reinforcement Learning-Based Routing Protocols in Flying Ad Hoc Networks (FANET): A Review. Mathematics 2022, 10, 3017. [Google Scholar] [CrossRef]
- Yogarayan, S. Wireless Ad Hoc Network of MANET, VANET, FANET and SANET: A Review. J. Telecommun. Electron. Comput. Eng. JTEC 2021, 13, 13–18. [Google Scholar]
- Al-Essa, R.I.; Al-Suhail, G.A. A Service of RSU Communication in Internet of Vehicles (IoV) in Urban Environment. In ICCIDA 2022: Computational Intelligence, Data Analytics and Applications; Lecture Notes in Networks and Systems; Springer: Cham, Switzerland, 2023; Volume 643, pp. 291–303. [Google Scholar] [CrossRef]
- Manolopoulos, I.; Loukatos, D.; Kontovasilis, K. A Versatile MANET Experimentation Platform and Its Evaluation through Experiments on the Performance of Routing Protocols under Diverse Conditions. Future Internet 2022, 14, 154. [Google Scholar] [CrossRef]
- Sang, Q.; Wu, H.; Xing, L.; Xie, P. Review and Comparison of Emerging Routing Protocols in Flying Ad Hoc Networks. Symmetry 2020, 12, 971. [Google Scholar] [CrossRef]
- Alhameed, M.H.; Mahgoub, I.O. High Awareness Adaptive Beaconing Based on Fuzzy Logic in VANET. In Proceedings of the MobiWac ‘17: Proceedings of the 15th ACM International Symposium on Mobility Management and Wireless Access, New York, NY, USA, 21 November 2017; pp. 153–157. [Google Scholar] [CrossRef]
- Mahmud, I.; Cho, Y.-Z. Adaptive Hello Interval in FANET Routing Protocols for Green UAVs. IEEE Access 2019, 7, 63004–63015. [Google Scholar] [CrossRef]
- Saudi, N.A.M.; Arshad, M.A.; Buja, A.G.; Fadzil, A.F.A.; Saidi, R.M. Mobile Ad-Hoc Network (MANET) Routing Protocols: A Performance Assessment. In Proceedings of the Third International Conference on Computing, Mathematics and Statistics (iCMS2017), Langkawi, Malaysia, 28 March 2019; pp. 53–59. [Google Scholar] [CrossRef]
- Sirmollo, C.Z.; Bitew, M.A. Mobility-Aware Routing Algorithm for Mobile Ad Hoc Networks. Wirel. Commun. Mob. Comput. 2021, 2021, 6672297. [Google Scholar] [CrossRef]
- Al-Essa, R.I.; Al-Suhail, G.A. Mobility and Transmission Power of AODV Routing Protocol in MANET. In Proceedings of the 2022 2nd International Conference on Computing and Machine Intelligence (ICMI), Istanbul, Turkey, 15–16 July 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Han, S.Y.; Lee, D. An adaptive hello messaging scheme for neighbor discovery in on-demand MANET routing protocols. IEEE Commun. Lett. 2013, 17, 1040–1043. [Google Scholar]
- Li, X.; Huang, J. ABPP: An Adaptive Beacon Scheme for Geographic Routing in FANET. In Proceedings of the 2017 18th International Conference on Parallel and Distributed Computing, Applications and Technologies (PDCAT), Taipei, Taiwan, 18–20 December 2017; pp. 293–299. [Google Scholar] [CrossRef]
- Shelly, S.; Babu, A.V. Link Reliability Based Greedy Perimeter Stateless Routing for Vehicular Ad Hoc Networks. Int. J. Veh. Technol. 2015, 2015, 921414. [Google Scholar] [CrossRef]
- Aljabry, I.A.; Al-Suhail, G.A. A Simulation of AODV and GPSR Routing Protocols in VANET Based on Multimetrices. Iraqi J. Electr. Electron. Eng. 2021, 17, 66–72. [Google Scholar] [CrossRef]
- Shah, S.A.A.; Ahmed, E.; Xia, F.; Karim, A.; Shiraz, M.; Noor, R.M. Adaptive Beaconing Approaches for Vehicular Ad Hoc Networks: A Survey. IEEE Syst. J. 2018, 12, 1263–1277. [Google Scholar] [CrossRef]
- Singh, V.; Sharma, K.P.; Verma, H.K. Evaluating the Impact of Beacon Interval and Neighbor Timeout Timer on the Performance of Geographical Routing in FANETs. In Proceedings of the 3rd International Conference on Integrated Intelligent Computing Communication & Security (ICIIC 2021), Bangalore, Karnataka, India, 6–7 August 2021; Volume 4, pp. 331–338. [Google Scholar]
- Silva, A.; Niaz Reza, K.M.; Oliveira, A. An Adaptive GPSR Routing Protocol for VANETs. In Proceedings of the 2018 15th International Symposium on Wireless Communication Systems (ISWCS), Lisbon, Portugal, 28–31 August 2018. [Google Scholar] [CrossRef]
- Alemneh, E.; Senouci, S.; Messous, M. An energy-efficient adaptive beaconing rate management for pedestrian safety: A fuzzy logic-based approach. Pervasive Mob. Comput. 2020, 69, 101285. [Google Scholar] [CrossRef]
- Rawat, G.S.; Singh, K. Joint Beacon Frequency and Beacon Transmission Power Adaptation for Internet of Vehicles. Trans. Emerg. Telecommun. Technol. 2020, 33, e4124. [Google Scholar] [CrossRef]
- Yadav, K.; Bathla, R.K. MAC Issues in Mobile Ad-Hoc Network. Int. J. Comput. Appl. 2019, 181, 39–43. [Google Scholar] [CrossRef]
- Karp, B.; Kung, H.T. GPSR: Greedy Perimeter Stateless Routing for Wireless Networks. In Proceedings of the 6th Annual International Conference on Mobile Computing and Networking—MobiCom ’00 2000, New York, NY, USA, 1 August 2000. [Google Scholar] [CrossRef]
- Ouladdjedid, L.K.; Brik, B. Dynamic Beacon Distribution Mechanism for Internet of Vehicles: An Analytical Study. Electronics 2023, 12, 818. [Google Scholar] [CrossRef]
- Sarishma, T.R.; Kumar, S.; Awasthi, M.K. To Beacon or Not?: Speed Based Probabilistic Adaptive Beaconing Approach for Vehicular Ad-Hoc Networks; Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering; Springer: Cham, Switzerland, 2021; Volume 372. [Google Scholar] [CrossRef]
- Cao, Z.; Silva, B.N.; Diyan, M.; Li, J.; Han, K. Intersection Routing Based on Fuzzy Multi-Factor Decision for VANETs. Appl. Sci. 2020, 10, 6613. [Google Scholar] [CrossRef]
- Agrawal, S.; Tyagi, N.; Iqbal, A.; Rao, R.S. An Intelligent Greedy Position-Based Multi-hop Routing Algorithm for Next-Hop Node Selection in VANETs. Proc. Natl. Acad. Sci. India Sect. A Phys. Sci. 2018, 90, 39–47. [Google Scholar] [CrossRef]
- Ayub, M.S.; Adasme, P.; Melgarejo, D.C.; Rosa, R.L.; Rodriguez, D.Z. Intelligent Hello Dissemination Model for FANET Routing Protocols. IEEE Access 2022, 10, 46513–46525. [Google Scholar] [CrossRef]
- Hassan, A.; Ahmed, M.H.; Rahman, M.A. Adaptive beaconing system based on fuzzy logic approach for vehicular network. In Proceedings of the 2013 IEEE 24th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), London, UK, 8–11 September 2013; pp. 2581–2585. [Google Scholar] [CrossRef]
- Mendel, J.M. Fuzzy logic systems for engineering: A tutorial. Proc. IEEE 1995, 83, 345–377. [Google Scholar] [CrossRef]
- Sangaiah, A.K.; Javadpour, A.; Hsu, C.-C.; Haldorai, A.; Zeynivand, A. Investigating Routing in the VANET Network: Review and Classification of Approaches. Algorithms 2023, 16, 381. [Google Scholar] [CrossRef]
- Zhang, F.; Yang, G. A Stable Backup Routing Protocol for Wireless Ad Hoc Networks. Sensors 2020, 20, 6743. [Google Scholar] [CrossRef] [PubMed]
- Al-Essa, R.I.; Al-Suhail, G.A. An Efficacy of Transmission Power on DYMO Routing Protocol in VANET. In Proceedings of the 2022 International Conference on Engineering & MIS (ICEMIS), Istanbul, Turkey, 4–6 July 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Kaur, S.; Gupta, A.K. Position Based Routing in Mobile Ad-Hoc Networks: An Overview. Int. J. Comput. Sci. Technol. IJCST 2012, 3. [Google Scholar]
- Ramasamy Rajeswari, A. A Mobile Ad Hoc Network Routing Protocols: A Comparative Study. In Recent Trends in Communication Networks; IntechOpen: London, UK, 2020. [Google Scholar] [CrossRef]
- Sabor, N.; Sasaki, S.; Abo-Zahhad, M.; Ahmed, S.M. A Comprehensive Survey on Hierarchical-Based Routing Protocols for Mobile Wireless Sensor Networks: Review, Taxonomy, and Future Directions. Wirel. Commun. Mob. Comput. 2017, 2017, 2818542. [Google Scholar] [CrossRef]
- Sabaresan, V.; Godfrey Winster, S. Multicast Routing Protocols for Mobile ADHOC Networks. Int. J. Eng. Adv. Technol. 2019, 9, 148–163. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhang, H.; Du, X.; Zhou, Z.; Su, S.; Jin, R. Contention-based adaptive position update for intermittently connected VANETs. In Proceedings of the 2014 IEEE Global Communications Conference, Austin, TX, USA, 8–12 December 2014; pp. 51–56. [Google Scholar] [CrossRef]
- Alsaqour, R.; Abdelhaq, M.; Saeed, R.; Uddin, M.; Alsukour, O.; Al-Hubaishi, M.; Alahdal, T. Dynamic Packet Beaconing for GPSR Mobile Ad Hoc Position-Based Routing Protocol Using Fuzzy Logic. J. Netw. Comput. Appl. 2015, 47, 32–46. [Google Scholar] [CrossRef]
- Houssaini, Z.S.; Zaimi, I.; Oumsis, M.; Ouatik, S.E.A. GPSR + Predict: An Enhancement for GPSR to Make Smart Routing Decision by Anticipating Movement of Vehicles in VANETs. Adv. Sci. Technol. Eng. Syst. J. 2017, 2, 137–146. [Google Scholar] [CrossRef]
- Alzamzami, O.; Mahgoub, I. Fuzzy Logic-Based Geographic Routing for Urban Vehicular Networks Using Link Quality and Achievable Throughput Estimations. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2289–2300. [Google Scholar] [CrossRef]
- Naderi, M.; Zargari, F.; Ghanbari, M. Adaptive Beacon Broadcast in Opportunistic Routing for VANETs. Ad Hoc Netw. 2019, 86, 119–130. [Google Scholar] [CrossRef]
- Hu, C.-L.; Sosorburam, C. Enhanced Geographic Routing with Two-Hop Neighborhood Information in Sparse MANETs. Wirel. Pers. Commun. 2019, 107, 417–436. [Google Scholar] [CrossRef]
- Neelagiri, P.; Bhaskaran, V.M.; Linda, P.E. Effective Beaconing for Better Throughput in MANET. Int. J. Wirel. Mob. Comput. 2019, 17, 43–53. [Google Scholar] [CrossRef]
- Alnabhan, M.M. Advanced GPSR in Mobile Ad-Hoc Networks (MANETs). Int. J. Interact. Mob. Technol. iJIM 2020, 14, 107–131. [Google Scholar] [CrossRef]
- Rana, K.K.; Sharma, V.; Tiwari, G. Fuzzy Logic-Based Multi-Hop Directional Location Routing in Vehicular Ad-Hoc Network. Wirel. Pers. Commun. 2021, 121, 831–855. [Google Scholar] [CrossRef]
- Saifan, R.; Abu-Zant, S.; Alnabelsi, S.H.; Hawa, M.; Jubair, F. LDAB-GPSR: Location PreDiction with Adaptive Beaconing—Greedy Perimeter Stateless Routing Protocol for Mobile Ad Hoc Networks. Inf. Technol. Control 2022, 51, 235–251. [Google Scholar] [CrossRef]
- Aljabry, I.A.; Al-Suhail, G.A. Improving the Route Selection for Geographic Routing Using Fuzzy-Logic in VANET. In Intelligent Computing & Optimization, Proceedings of the ICO: 2022, Hua Hin, Thailand, 27–28 October 2022; Vasant, P., Zelinka, I., Weber, G.W., Eds.; Springer: Cham, Switzerland, 2022; Lecture Notes in Networks and Systems; Volume 371. [Google Scholar] [CrossRef]
- Singh, V.; Sharma, K.P.; Verma, H.K. ABNT: Adaptive Beaconing and Neighbor Timeout for Geographical Routing in UAV Networks. Peer-to-Peer Netw. Appl. 2022, 15, 2079–2100. [Google Scholar] [CrossRef]
- Kumar, S.; Raw, R.S.; Bansal, A.; Singh, P. UF-GPSR: Modified geographical routing protocol for flying ad-hoc networks. Trans. Emerg. Telecommun. Technol. 2023, 34, e4813. [Google Scholar] [CrossRef]
- Alshehri, A.; Badawy, A.-H.A.; Huang, H. FQ-AGO: Fuzzy Logic Q-Learning Based Asymmetric Link Aware and Geographic Opportunistic Routing Scheme for MANETs. Electronics 2020, 9, 576. [Google Scholar] [CrossRef]
- Aljabry, I.A.; Al-Suhail, G.A.; Jabbar, W.A. A Fuzzy GPSR Route Selection Based on Link Quality and Neighbor Node in VANET. In Proceedings of the 2021 International Conference on Intelligent Technology, System and Service for Internet of Everything (ITSS-IoE), Sana’a, Yemen, 1–2 November 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Smiri, S.; Ben Abbou, A.; Boushaba, A.; Zahi, A.; Ben Abbou, R. WA-GPSR: Weight-Aware GPSR-Based Routing Protocol for VANET. Int. J. Interact. Mob. Technol. iJIM 2021, 15, 69–83. [Google Scholar] [CrossRef]
- Bengag, A.; Bengag, A.; Elboukhari, M. A Novel Greedy Forwarding Mechanism Based on Density, Speed and Direction Parameters for Vanets. Int. J. Interact. Mob. Technol. iJIM 2020, 14, 196–204. [Google Scholar] [CrossRef]
- Ullah, S.; Mohammadani, K.H.; Khan, M.A.; Ren, Z.; Alkanhel, R.; Muthanna, A.; Tariq, U. Position-Monitoring-Based Hybrid Routing Protocol for 3D UAV-Based Networks. Drones 2022, 6, 327. [Google Scholar] [CrossRef]
- Bouk, S.H.; Kim, G.; Ahmed, S.H.; Kim, D. Hybrid Adaptive Beaconing in Vehicular Ad Hoc Networks: A Survey. Int. J. Distrib. Sens. Netw. 2015, 11, 390360. [Google Scholar] [CrossRef]
- Hasan, N.; Mishra, A.; Ray, A.K. Fuzzy Logic Based Cross-Layer Design to Improve Quality of Service in Mobile Ad-Hoc Networks for Next-Gen Cyber Physical System. Eng. Sci. Technol. Int. J. 2022, 35, 101099. [Google Scholar] [CrossRef]
- Sharma, A.; Bansal, A.; Rishiwal, V. Efficient on Demand Routing Protocol to Optimize Throughput in Manet. Int. J. Recent Technol. Eng. IJRTE 2019, 8, 2653–2660. [Google Scholar] [CrossRef]
- Perkins, C.E.; Royer, E.M. Ad-hoc on-demand distance vector routing. In Proceedings of the Second IEEE Workshop on Mobile Computing Systems and Applications—WMCSA’99, New Orleans, LA, USA, 25–26 February 1999; pp. 90–100. [Google Scholar]
- OMNeT++ Discrete Event Simulator. Available online: https://omnetpp.org/ (accessed on 1 December 2022).
- Aljabry, I.A.; Al-Suhail, G.A. A Survey on Network Simulators for Vehicular Ad-hoc Networks (VANETS). Int. J. Comput. Appl. 2021, 174, 1–9. [Google Scholar] [CrossRef]
- Karabulut, M.A.; Shahen Shah, A.F.M.; Ilhan, H.; Pathan, A.-S.K.; Atiquzzaman, M. Inspecting VANET with Various Critical Aspects—A Systematic Review. Ad Hoc Netw. 2023, 103281. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Routing Protocol | Categories | Description | Advantages | Drawbacks |
|---|---|---|---|---|
| Topology-based | Reactive: AODV, DSR, ACOR, DYMO | On-demand routing; routes are founded when required by establishing route requests across the network. |
|
|
| Proactive: STAR, DSDV, OLSR | The routes kept updating in a table even though there is no demand for a route (table-driven) |
|
| |
| Hybrid: DVRP, ZRP, HSLS | Combine Reactive and Proactive routing algorithms. |
|
| |
| Geographic-based | GPSR, LAR, MORA, VADD, | The path establishment is based on the node’s location information from GPS equipment. |
|
|
| Hierarchical-based | HSR, HDVG | The nodes are organized into hierarchal groups. |
|
|
| Multicast-based | CBM, MDR, SMORT, AOMDV | A node establishes route to a single or multiple destinations simultaneously. |
|
|
| Geo-cast-based | DGR, IVG | Send messages to a single or multiple nodes based on location (combine geographic and multicast routing). |
|
|
| Cluster based | GBDRP, PBSM, LEACH | The protocol divides network nodes into a number of overlapping or disparate clusters and assigns cluster heads to keep track of cluster membership. |
|
|
| Research | Year | Routing | Simulator | Network | Objective |
|---|---|---|---|---|---|
| Ref. [38] | 2014 | Contention-based Adaptive Position Update (CAPU) | NS-2 | VANET | To update the positions of the nodes and improve the greedy forwarding mechanism |
| Ref. [39] | 2015 | GPSR-FLDB (Adaptive Beaconing) | NS-2 | MANET | Optimizes beacon interval time in GPSR routing |
| Ref. [40] | 2017 | GPSR + Predict (Adaptive beaconing) | NS-2 | VANET | To ensure that each vehicle estimates its own position for the near future. |
| Ref. [41] | 2019 | (FL-DGR) Fixed beaconing | NS-3.25 + SUMO | VANET | To increase PDR, throughput and decrease average E2ED |
| Ref. [42] | 2019 | (ABOR) Adaptive Update Beacon in Opportunistic Routing | NS-2.3 | VANET | To reduce beacon overhead, channel contention To increase accuracy of the next hop and QoS |
| Ref. [43] | 2019 | Enhanced Geographic Routing with two-hop neighborhood information | ------- | MANET | To deal with critical communication voids in sparse MANETs. To reduce overhead and delay against communication voids |
| Ref. [44] | 2019 | MODEL Adaptive Beaconing (Fuzzy-based) | NS-2 | MANET | Maintenance of the trade-off between beacon rate overhead and routing precision |
| Ref. [45] | 2020 | AGPSR (Update Beacons) Velocity-based | Programming C# | MANET | Beacon Interval Updating periodically depends on velocity to improve greedy forwarding |
| Ref. [46] | 2021 | FL-MDLR (Fixed Beaconing) | NS-2 | VANET | To establish a stable route from the source S to destination node D. |
| Ref. [47] | 2022 | LDAB-GPSR (Slow-Start Adaptive Beaconing) | NS-2.35 | MANET | To optimize packet-delivery ratio and reduce average control overhead. |
| Ref. [48] | 2022 | FL-QN GPSR (Fixed Beaconing) | OMNeT + SUMO | VANET | To detect the appropriate next-hop node for packet forwarding. |
| Ref. [49] | 2022 | ABNT (Adaptive Beaconing) | NS-3 | FANET | To establish an adaptive beacon to control the transmission in UAV networks. |
| Ref. [50] | 2023 | UP-GPSR (Fixed Beaconing) | NS-3 | FANET | To select optimal next-hop (i.e., optimize greedy forwarding) |
| Proposed Work | 2023 | AFB-GPSR (Adaptive Beaconing) Fuzzy-based | OMNeT | MANET | To update optimal beacon interval to increase network reliability and reduce routing overhead |
| Seq | NS | OHND | LR | Output (BIT) |
|---|---|---|---|---|
| 1 | Small | Small | Small | Short |
| 2 | Small | Small | Medium | Medium Short |
| 3 | Small | Small | Large | Medium Short |
| 4 | Small | Medium | Small | Medium Short |
| 5 | Small | Medium | Medium | Medium |
| 6 | Small | Medium | Large | Medium Long |
| 7 | Small | Large | Small | Medium |
| 8 | Small | Large | Medium | Medium Long |
| 9 | Small | Large | Large | Long |
| 10 | Medium | Small | Small | Short |
| 11 | Medium | Small | Medium | Medium Short |
| 12 | Medium | Small | Large | Medium |
| 13 | Medium | Medium | Small | Medium Short |
| 14 | Medium | Medium | Medium | Medium |
| 15 | Medium | Medium | Large | Medium Long |
| 16 | Medium | Large | Small | Medium Long |
| 17 | Medium | Large | Medium | Long |
| 18 | Medium | Large | Large | Long |
| 19 | Large | Small | Small | Short |
| 20 | Large | Small | Medium | Short |
| 21 | Large | Small | Large | Medium Short |
| 22 | Large | Medium | Small | Medium Short |
| 23 | Large | Medium | Medium | Medium |
| 24 | Large | Medium | Large | Medium Long |
| 25 | Large | Large | Small | Medium Long |
| 26 | Large | Large | Medium | Medium Long |
| 27 | Large | Large | Large | Medium Long |
| Routing Protocol | Experimental Scenario (1) | ||
|---|---|---|---|
| PDR% | E2E Delay | Throughput | |
| GPSR-2s | 57% | 0.193 | 8243 |
| GPSR-1s | 62% | 0.187 | 9015 |
| AODV | 62% | 0.308 | 9017 |
| AFB-GPSR | 67% | 0.187 | 9519 |
| Experimental Scenario (2) | |||
| PDR% | E2E Delay | Throughput | |
| GPSR-2s | 58% | 0.25 | 8276 |
| GPSR-1s | 67% | 0.27 | 9924 |
| AODV | 62% | 0.5 | 9056 |
| AFB-GPSR | 75% | 0.29 | 11,161 |
| Experimental Scenario (3) | |||
| PDR% | NRL | Throughput | |
| GPSR-2s | 73% | 21 | 10,568 |
| GPSR-1s | 81% | 27 | 11,733 |
| AODV | ---- | ----- | ---- |
| AFB-GPSR | 86% | 18 | 12,462 |
| Method | Year | Routing | Network’s Parameters | PDR% | E2ED | Throughput |
|---|---|---|---|---|---|---|
| Ref. [39] | 2015 | GPSR-FLDB | Data Packet Size 512 B, Node Speed 40 m/s NS2.33 | ~90% | 600 ms | ---- |
| Ref. [40] | 2017 | GPSR + Predict | Data Packet Size 64 B, Node Speed 20 m/s NS2.33 | ~80% | 20 ms | 24 Kbps |
| Ref. [47] | 2022 | LDAB-GPSR | ~90% | 17 ms | 30 Kbps | |
| Proposed Protocol | 2023 | AFB-GPSR | Data Packet Size 512 B, Node Speed 20 m/s OMNeT++ | 80% | 270 ms | 11 Kbps |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Essa, R.I.; Al-Suhail, G.A. AFB-GPSR: Adaptive Beaconing Strategy Based on Fuzzy Logic Scheme for Geographical Routing in a Mobile Ad Hoc Network (MANET). Computation 2023, 11, 174. https://doi.org/10.3390/computation11090174
Al-Essa RI, Al-Suhail GA. AFB-GPSR: Adaptive Beaconing Strategy Based on Fuzzy Logic Scheme for Geographical Routing in a Mobile Ad Hoc Network (MANET). Computation. 2023; 11(9):174. https://doi.org/10.3390/computation11090174
Chicago/Turabian StyleAl-Essa, Raneen I., and Ghaida A. Al-Suhail. 2023. "AFB-GPSR: Adaptive Beaconing Strategy Based on Fuzzy Logic Scheme for Geographical Routing in a Mobile Ad Hoc Network (MANET)" Computation 11, no. 9: 174. https://doi.org/10.3390/computation11090174