
A Method for Inverting Shallow Sea Acoustic Parameters Based on the Backward Feedback Neural Network Model
 ,
,
Abstract
:1. Introduction
2. Geoacoustic Parameters Inversion Method Based on the Neural Network Model
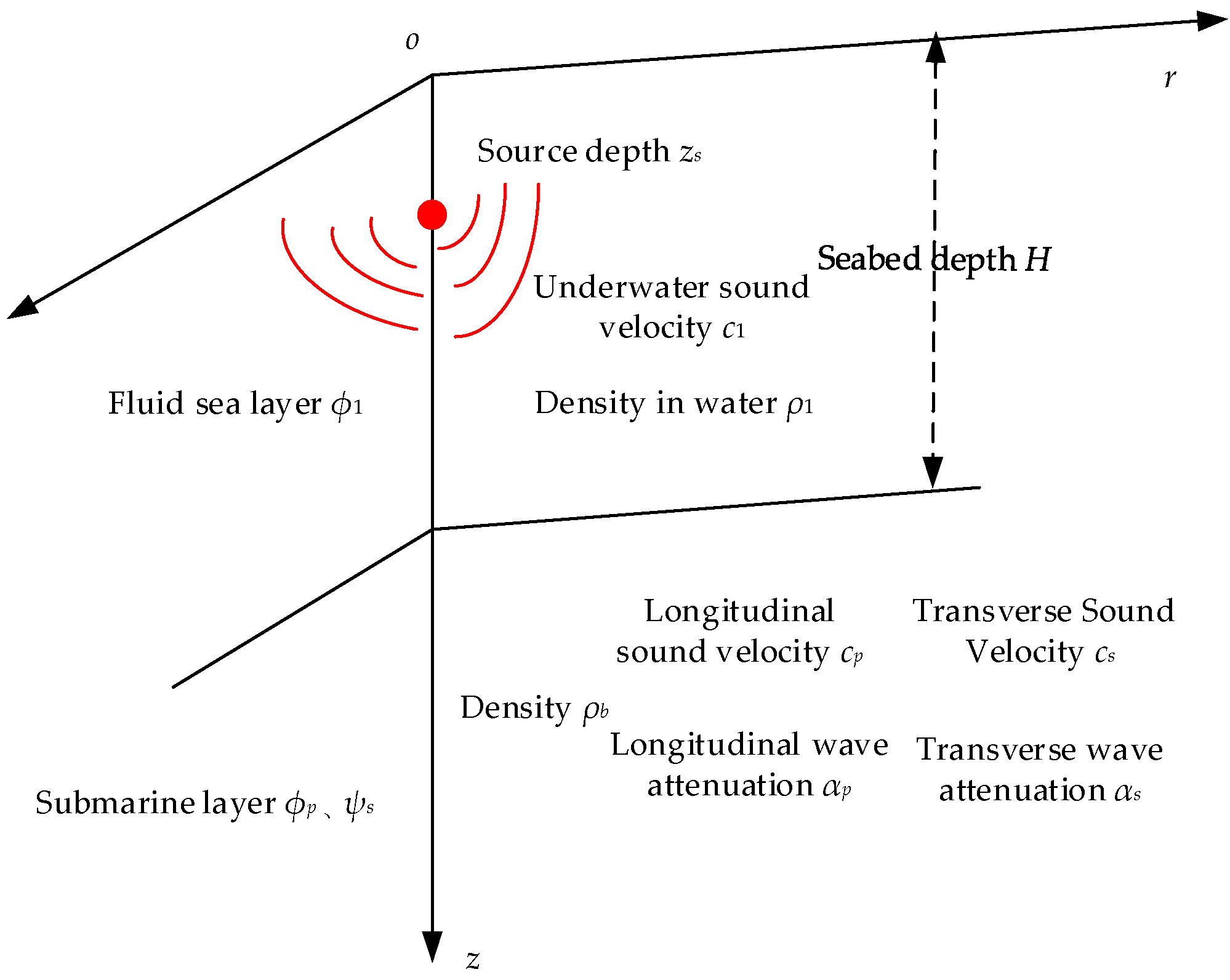
2.1. Sound Field Modeling in the Shallow Sea
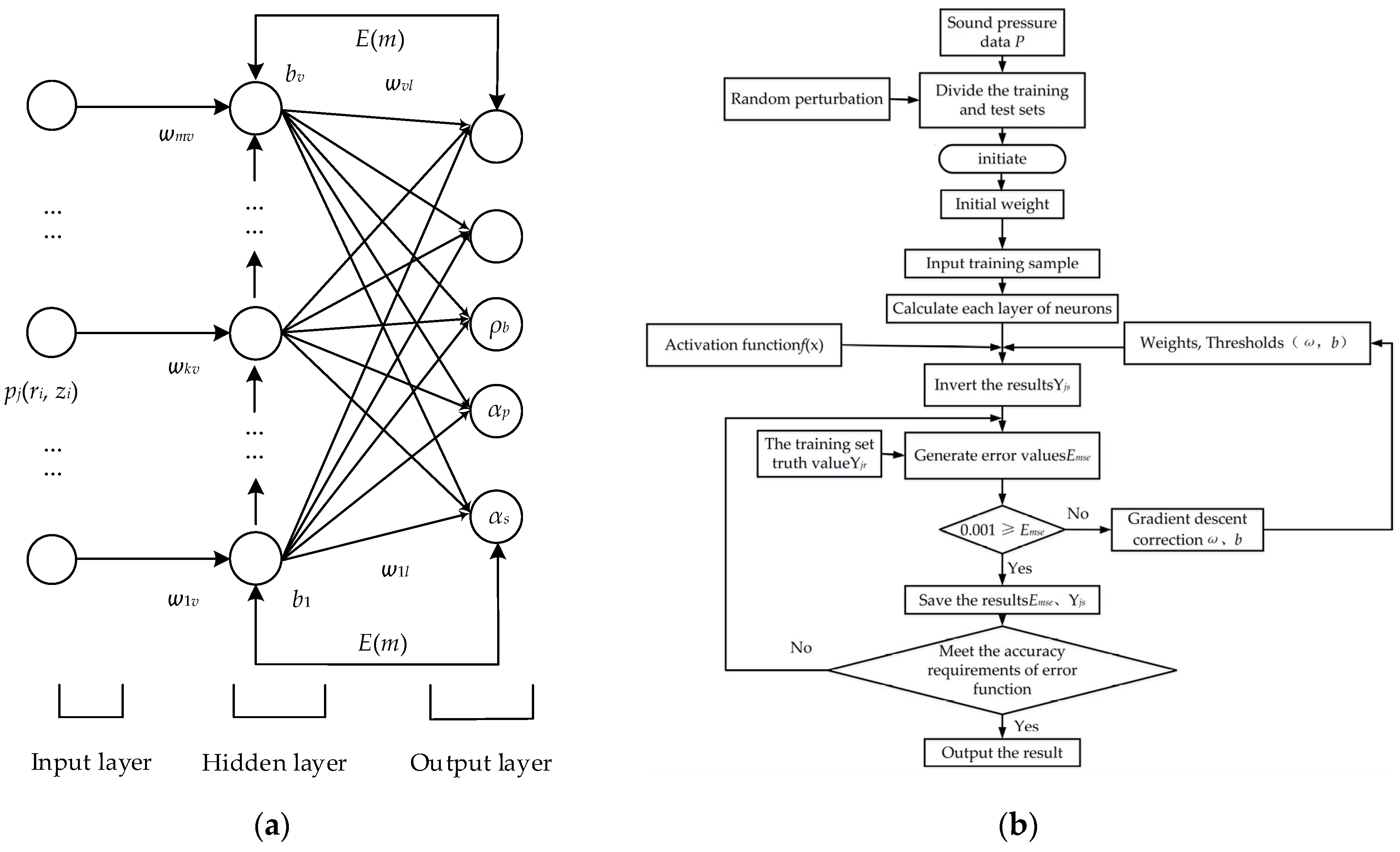
2.2. Construction of BP Neural Network
2.3. BP model Training Data Generation
3. BP Neural Network Model Verification
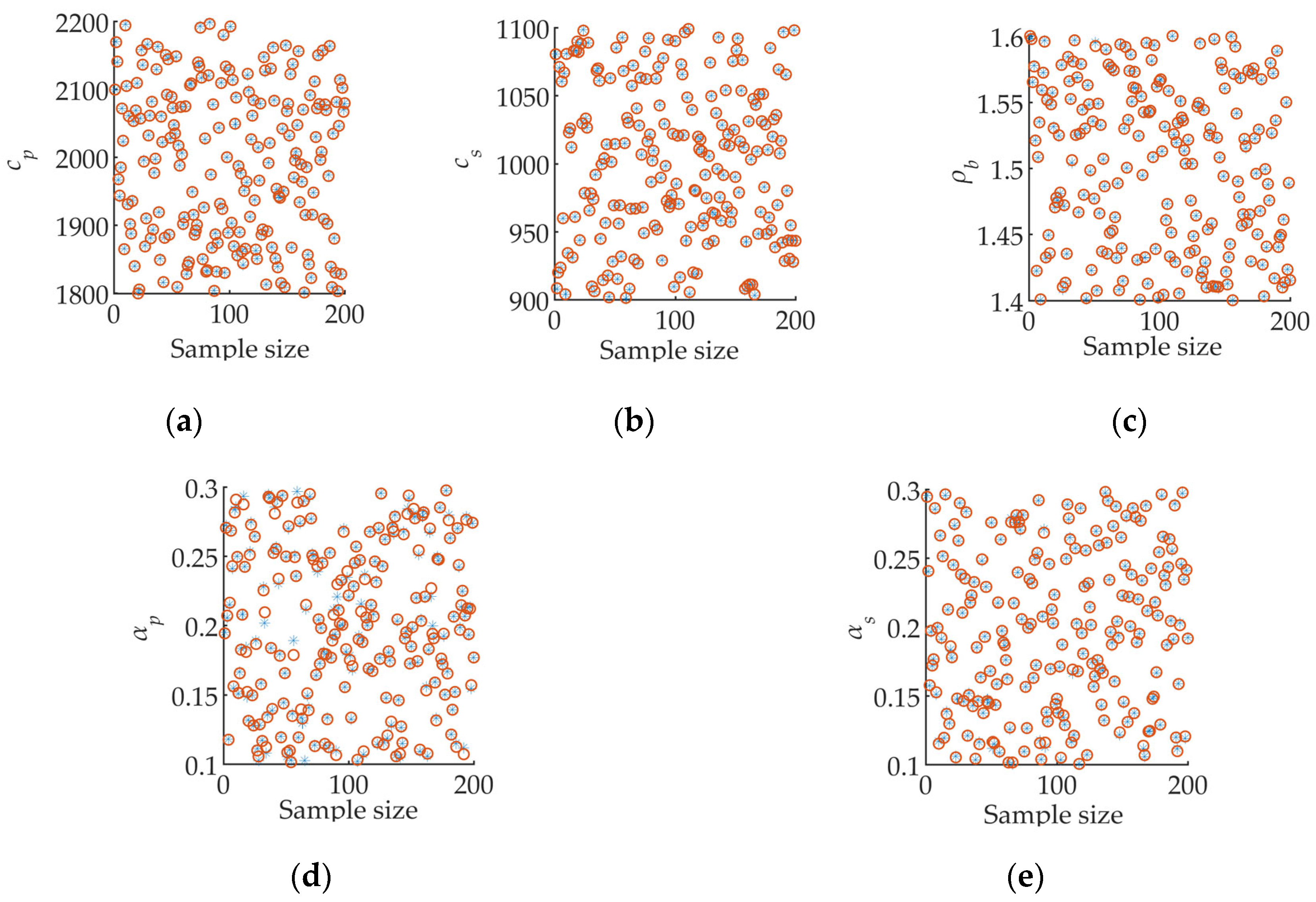
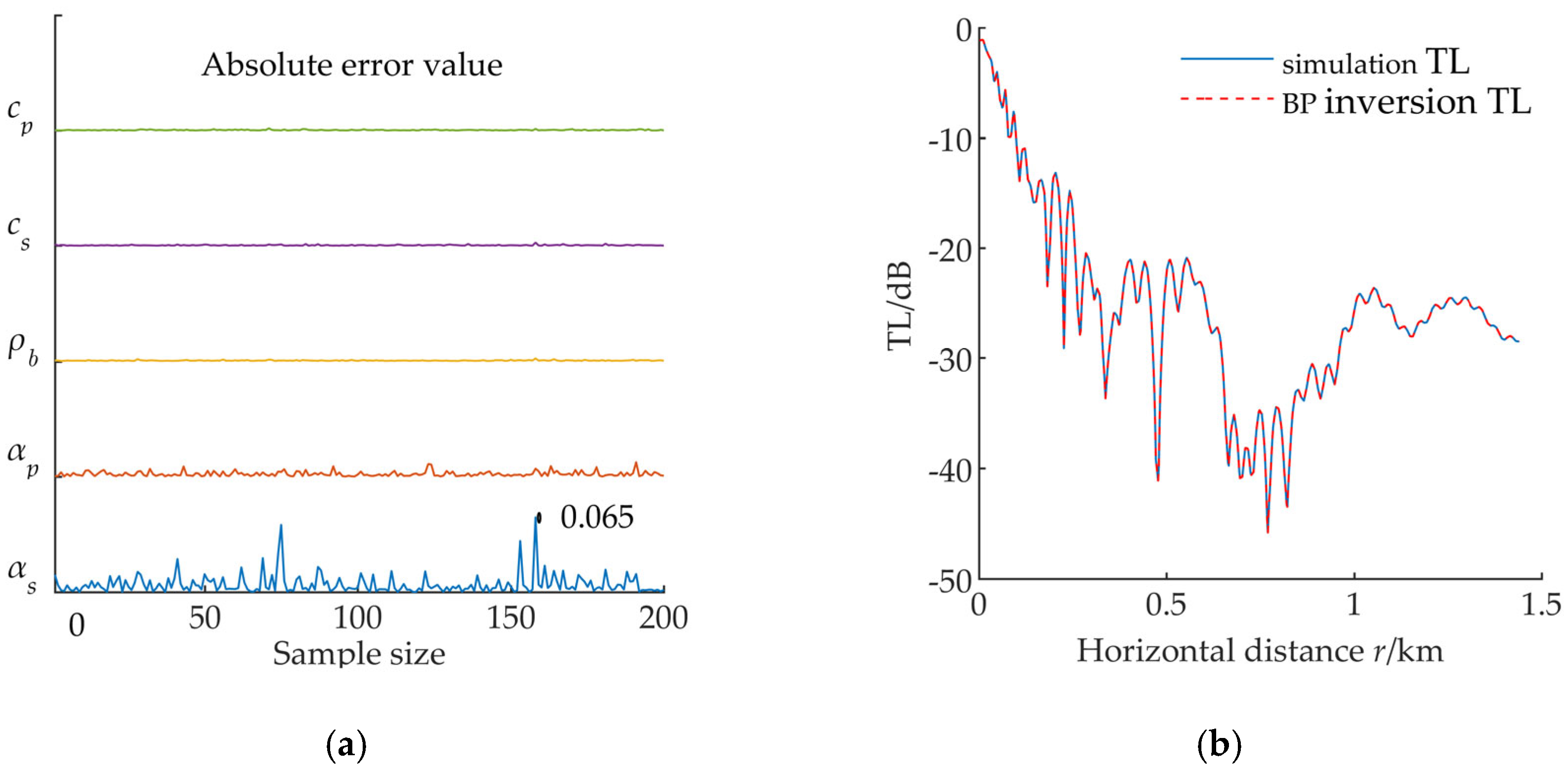
3.1. Simulation Data Verification
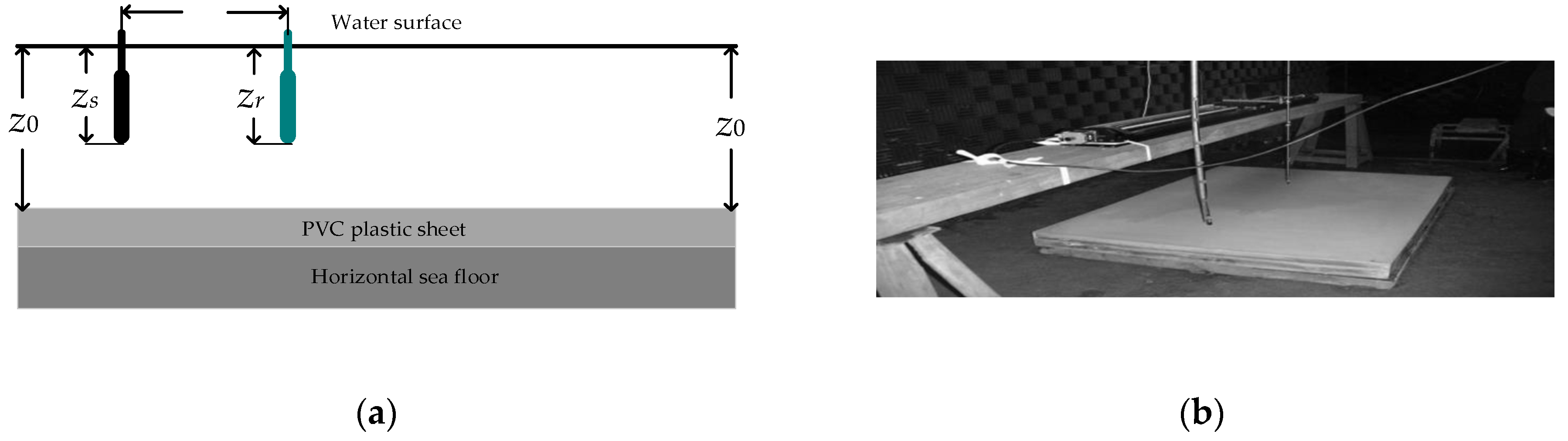
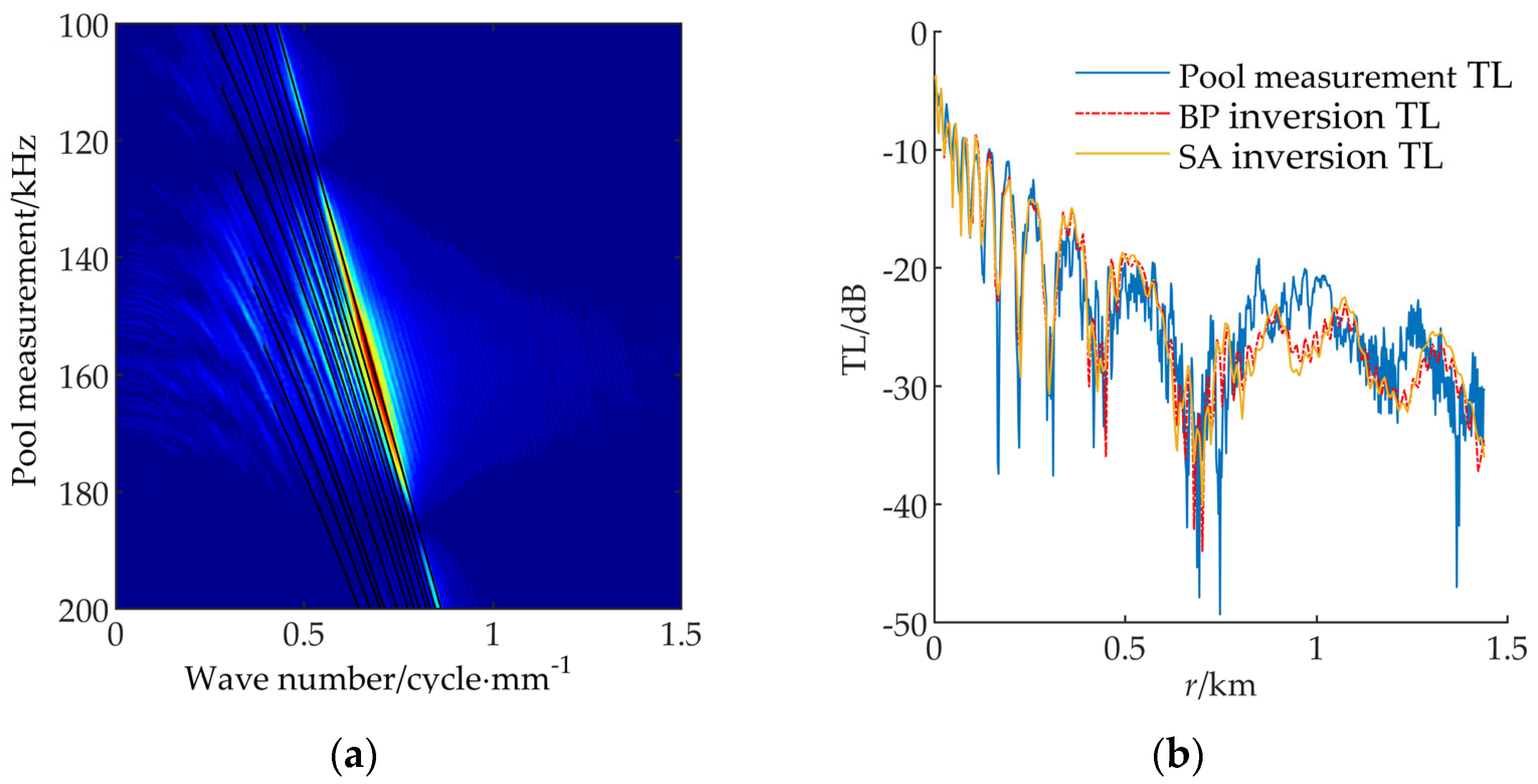
3.2. Validation of Measured Data
4. Conclusions
- This study proposes an inversion method for five ground acoustic parameters using the back propagation (BP) neural network model. The method utilizes the fast field method (FFM) to predict the shallow sea sound pressure field and establishes a relationship model between the predicted sound pressure field and the ground sound parameters. By inputting measured sound pressure field data into the neural network model, accurate inversion results for the five subsea acoustic parameters are obtained. The method is validated through simulation and experimental data.
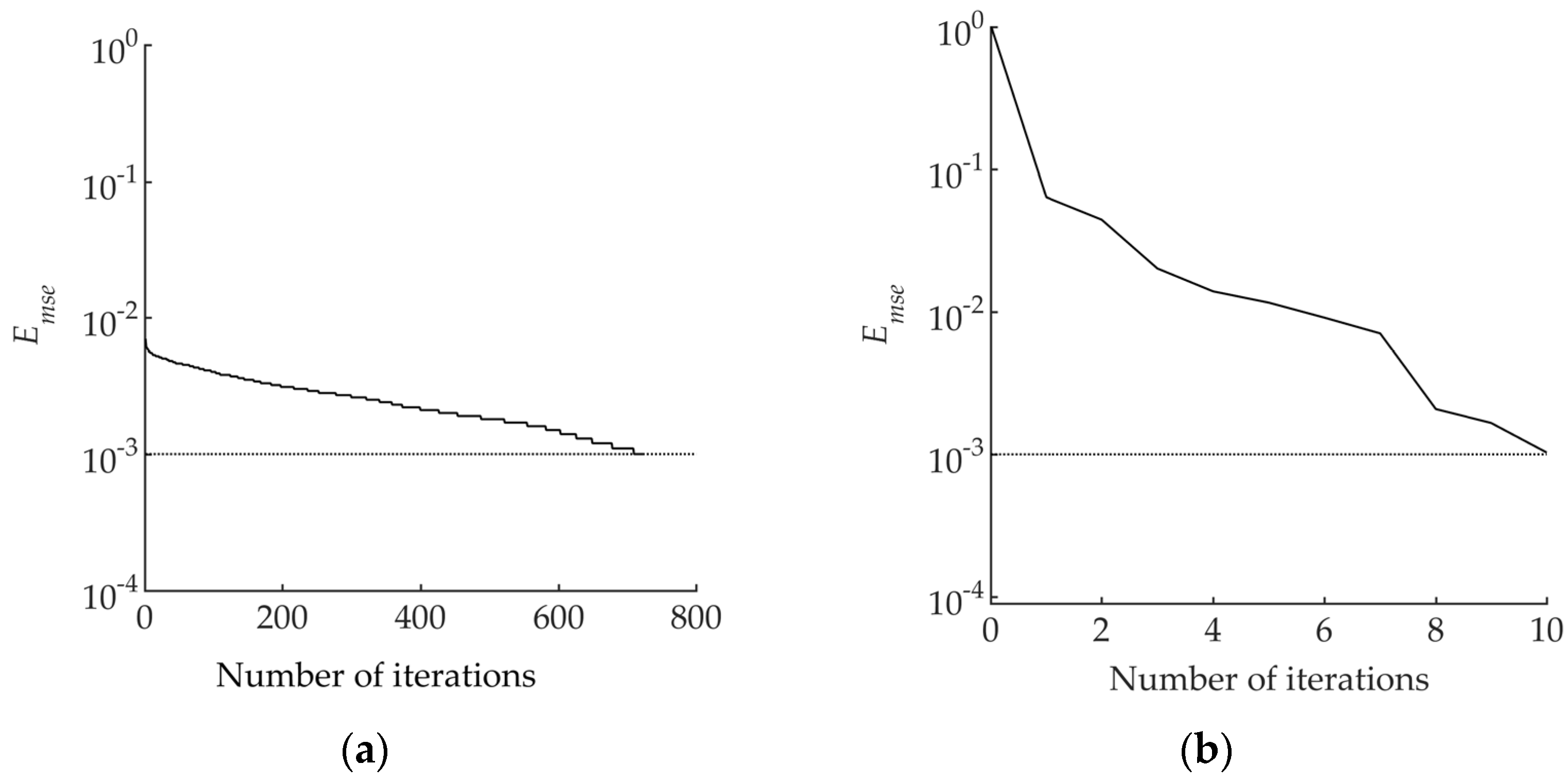
- Compared to existing optimization algorithms, the neural network-based inversion method for acoustic parameters in the shallow sea offers higher efficiency and avoids local optima. By adjusting the weights and thresholds of neurons, the neural network quickly approximates the mapping relationship between measured data and the parameters to be inverted. Among them, all kinds of weights in the hyperparameter matrix [w, b] determine the establishment process of the network, effectively avoiding the resulting error caused by the local optimal of a single parameter. The established network effectively mitigates errors caused by local optima in individual parameters. With comparable accuracy requirements, this method improves inversion efficiency, enables direct application to similar problems, eliminates redundant calculations, and enhances the overall efficiency and applicability.
- For the acoustic pressure field in water, the five acoustic parameters, i.e., shallow sea bottom density, p-wave velocity, S-wave velocity, p-wave velocity attenuation, and S-wave velocity attenuation, have different effects. It can be seen from the results of this paper that the accuracy of the inversion results of the two algorithms for S-wave acoustic velocity cp, i.e., p-wave acoustic velocity cs and the density ρb of the sedimentary layer, are all higher than S-wave attenuation αp and p-wave attenuation αs, which accords with the physical property that the first three types of acoustic parameters have a greater influence on the shallow sea sound pressure field in forward modeling. Due to the complexity of the shallow sea bottom and the influence of various noises on the distribution of sound fields in seawater, the actual calculation results may be somewhat different to the real situation. In addition, the coupling relationship between the physical parameters of the seabed and the sensitivity relationship of each parameter are also factors that affect the accuracy of the calculation. Given the above deficiencies, the BP neural network model is further optimized by adjusting the neural network structure and adding random noise to the subsequent research to obtain the earth acoustic parameter inversion model with stronger reliability. At the same time, the influence of network setting parameters on the accuracy of inversion results is further studied and discussed in detail. This paper focuses on conducting sound field simulation calculations and submarine sediment parameter inversion using a shallow sea semi-infinite seabed model. In future research, we plan to incorporate multi-layer seabed models to improve the parameter inversion process based on real-world seabed conditions. Additionally, we will explore the integration of GA and other optimization algorithms to enhance the performance of the BP neural network algorithm and improve the accuracy of predictions. These advancements aim to enhance the authenticity and effectiveness of the inversion process.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| b | The threshold of each neuron of the neural network |
| BP | Backward feedback neural network algorithm |
| c1 | Underwater sound velocity |
| cp | Longitudinal sound velocity |
| cs | Transverse sound velocity |
| Emse | Root mean square error |
| H | Sea depth |
| l | Number of nodes in the output layer |
| MAE | Mean absolute error |
| n | The threshold of each neuron of the neural network |
| SA | Backward feedback neural network algorithm |
| TL | Propagation loss |
| v | Number of hidden layer nodes |
| w | The weights between the layers of the neural network |
| Predict the sound pressure value | |
| Measured sound pressure value | |
| zs | Source depth |
| zs | Sound source depth |
| zre | Receiving depth |
| αs | Transverse wave attenuation |
| αp | Longitudinal wave attenuation |
| Learning rate | |
| ρ1 | Density in water |
| ρb | Density |
| ϕ1 | Fluid sea layer |
| ϕp | Submarine layer |
| ψs | Submarine layer |
References
- Ren, Q.Y.; Piao, S.C.; Ma, L. Geoacoustic inversion using ship noise vector field. J. Harbin Eng. Univ. 2018, 39, 236–240. [Google Scholar]
- Li, Z.L.; Zhang, R.H. Hybrid geoacoustic inversion method and its application to different sediments. J. Acoust. Soc. Am. 2017, 142, 2558. [Google Scholar] [CrossRef]
- Ma, L.; Wen, M.H.; Qiao, G. Design and Application of Acoustic Communication System for Unmanned Undersea Vehicle. J. Unmanned Undersea Syst. 2018, 26, 449–455. [Google Scholar]
- Gerstoft, P. Inversion of seismoacoustic data using genetic algorithms and aposteriori probability distributions. J. Acoust. Soc. Am. 1994, 95, 770–782. [Google Scholar] [CrossRef] [Green Version]
- Dragna, D.; Blanc-Benon, P. Sound propagation over the ground with a random spatially-varying surface admittance. J. Acoust. Soc. Am. 2017, 142, 2058–2072. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dall’Osto, D.R.; Dahl, P.H. Geoacoustic inversion based on particle velocity. J. Acoust. Soc. Am. 2016, 139, 2125. [Google Scholar] [CrossRef]
- Li, Q.Q.; Yang, F.L.; Zhang, K. Moving source parameter estimation in an uncertain environment. Acta Phys. Sin. 2016, 65, 155–163. [Google Scholar]
- Becker, K.M. Geoacoustic Inversion in Laterally Varying Shallow Water Environments Using High-Resolution Wavenumber Estimation. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2017. [Google Scholar]
- Qiu, C.J.; Chen, Y.; Ma, S.Q.; Zhou, M. Research on vertical correlation of deep sea sound field based on reliable acoustic path. Acoust. Technol. 2019, 3, 270–277. [Google Scholar]
- Wang, Z.J. Inversion for Sea Bottom Parameters Using Vertical Array. Bachelor’s Thesis, Harbin Engineering University, Harbin, China, 2008. [Google Scholar]
- Song, W.H.; Wang, P.Y. High-Resolution Modal Wavenumber Estimation in Range-Dependent Shallow Water Waveguides Using Vertical Line Arrays. J. Acoust. Soc. Am. 2022, 152, 691–705. [Google Scholar] [CrossRef]
- Huang, X.R.; Dai, Y.; Xu, Y.G. Seismic Inversion Experiments Based on Deep Learning Algorithm Using Different Datasets. J. Southwest. Pet. Univ. 2020, 42, 16–25. [Google Scholar]
- Wu, Z.Q.; Mao, Z.H.; Wang, Z. Research on China’s Coastal GPS Stations for Tide Coefficients. Hydrogr. Surv. Charting 2019, 39, 11–15. [Google Scholar]
- Li, R.Y.; Zhang, H.Q.; Zhuang, Q. BP Neural Network and Improved Differential Evolution for Transient Electromagnetic Inversion. Comput. Geosci. 2020, 137, 104–106. [Google Scholar] [CrossRef]
- Wen, B.Y.; Tang, W.C.; Tian, Y.W. Significant Wave Height Field Inversion of High Frequency Radar Based on BP Neural Network. J. Huazhong Univ. Sci. Technol. 2021, 49, 114–119. [Google Scholar]
- Zhu, H.H.; Xiao, R.; Zhu, J. Influence of Internal Solitary Waves on Sound Propagation in Three-dimensional Shallow Sea. Acta Acust. 2021, 46, 365–374. [Google Scholar]
- Tian, X.; Conibear, L.; Steward, J. A Neural-Network Based MPAS—Shallow Water Model and Its 4D-Var Data Assimilation System. Atmosphere 2023, 14, 157. [Google Scholar] [CrossRef]
- Burgan, H.I. Comparison of different ANN (FFBP, GRNN, RBF) algorithms and Multiple Linear Regression for daily streamflow prediction in Kocasu River, Turkey. Fresenius Environ. Bull. 2022, 31, 4699–4708. [Google Scholar]
- Hamilton, E.L. Geoacoustic modeling of the sea floor. J. Acoust. Soc. Am. 1980, 68, 1313–1340. [Google Scholar] [CrossRef]
- Frederick, C.; Villar, S.; Michalopoulou, Z.H. Seabed classification using physics-based modeling and machine learning. J. Acoust. Soc. Am. 2020, 148, 859–872. [Google Scholar] [CrossRef]
- Komen, D.; Neilsen, T.B.; Howarth, K. Seabed and range estimation of impulsive time series using a convolutional neural network. J. Acoust. Soc. Am. 2020, 147, 403–408. [Google Scholar] [CrossRef]
- Li, Q.Q.; Khan, S.; Yang, F.L.; Xu, Y.; Zhang, K. Compressive Acoustic Sound Speed Profile Estimation in the Arabian Sea. Mar. Geod. 2020, 43, 603–620. [Google Scholar] [CrossRef]
- Li, L.J.; Sun, H.X.; Liu, Y.R. Numerical analysis on radiation acoustic field of ideal sound source. Mach. Des. Manuf. 2019, 4, 192–195. [Google Scholar]
- Zhu, H.H.; Zheng, G.X.; Zhang, H.G. Study on propagation characteristics of low frequency acoustic signal in shallow water environment. J. Shanghai Jiao Tong Univ. 2017, 51, 1464–1472. [Google Scholar]
- Stoll, R.D.; Kan, T.K.G. Reflection of acoustic waves at a water-sediment interface. J. Acoust. Soc. Am. 1998, 70, 149–156. [Google Scholar] [CrossRef]
- Li, M.Z.; Li, Z.L.; Li, Q.Q. Geoacoustic inversion for bottom parameters in a thermocline environment in the northern area of the South China Sea. Acta Acust. 2019, 44, 321–328. [Google Scholar]
- Zhou, J.B.; Tang, J.; Yang, Y.X. A study on the estimation of source bearing in an ASA wedge: Diminishing the estimation error caused by horizontal refraction. J. Mar. Sci. Eng. 2021, 9, 1449. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, P.; Zhou, M. Multireceiver SAS imagery with generalized PCA. IEEE Geosci. Remote Sens. Lett. 2023, 99, 1. [Google Scholar] [CrossRef]
- Zhou, J.B. Analysis of ambient noise spectrum level correlation characteristics in the China Sea. IEEE Access 2020, 8, 7217–7226. [Google Scholar] [CrossRef]
- Li, X.M.; Piao, S.C.; Zhang, M.H. A passive source location method in a shallow water waveguide with a single sensor based on Bayesian theory. Sensors 2019, 19, 1452. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Wu, H.; Sun, H.; Ying, W. Multireceiver SAS imagery based on monostatic conversion. IEEE J.-STARS 2021, 14, 10835–10853. [Google Scholar] [CrossRef]
- Zheng, G.X.; Piao, S.C.; Zhu, H.H. Bayesian inversion method of geo-acoustic parameter in shallow sea using acoustic pressure field. J. Harbin Eng. Univ. 2021, 42, 497–504. [Google Scholar]
- Feng, X.; Zhou, M.Z.; Zhang, X.B. Variational Bayesian Inference Based Direction of Arrival Estimation in Presence of Shal-low Water Non-Gaussian Noise. J. Electron. Inf. Technol. 2022, 44, 1887–1896. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Geoacoustic Parameters | Search Range | Truth Value |
|---|---|---|
| c1 (m/s) | / | 1500 |
| ρ1 (g/cm3) | / | 1.025 |
| cp2 (m/s) | 1800–2200 | 2000 |
| cs2 (m/s) | 900–1100 | 1000 |
| ρb (g/cm3) | 1.4–1.6 | 1.5 |
| αp2 (dB·λ−1) | 0.1–0.3 | 0.2 |
| αs2 (dB·λ−1) | 0.1–0.3 | 0.2 |
| MAE | cp | cs | ρb | αp | αs |
|---|---|---|---|---|---|
| value | 2.8187 | 1.5010 | 0.0175 | 0.2103 | 0.0518 |
| SA | BP | Parameter Setting |
|---|---|---|
| Population number | Training set | 2000 |
| Temperature drop rate | Learning rate η | 0.01 |
| Minimum temperature/accuracy | accuracy | 0.001 |
| Objective function | Loss function | Emse |
| Initial temperature | / | 10 |
| Inversion Algorithm | cp | cs | ρb | αp | αs | CPU Usage Time | Number of Iterations | Calculation Accuracy |
|---|---|---|---|---|---|---|---|---|
| Truth value | 2000.00 | 1000.00 | 1.50 | 0.20 | 0.20 | / | / | / |
| SA algorithm | 2000.0922 | 999.5928 | 1.4993 | 0.2005 | 0.2110 | 10 ± 5 min | 780 ± 50 | 10–3 |
| Relative error of SA | 0.0046% | 0.041% | 0.047% | 0.25% | 5.5% | / | / | / |
| BP neural network model | 1999.1283 | 999.6819 | 1.5003 | 0.1998 | 0.2015 | 3 ± 1.5 min | 10 ± 5 | 10–3 |
| Relative error of BP model | 0.043% | 0.032% | 0.020% | 0.10% | 0.75% | / | / | / |
| Geoacoustic Parameters | Search Range | Inversion Results of BP | Inversion Results of SA |
|---|---|---|---|
| cp (m/s) | 2200–2500 | 2386.6 | 2379.6 |
| cs (m/s) | 1100–1300 | 1136.2 | 1191.1 |
| ρb (g/cm3) | 1.0–1.8 | 1.21 | 1.23 |
| αp (dB·λ−1) | 0.1–1.1 | 0.43 | 0.58 |
| αs (dB·λ−1) | 0.1–1.1 | 1.01 | 0.77 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, H.; Cui, Z.; Liu, J.; Jiang, S.; Liu, X.; Wang, J. A Method for Inverting Shallow Sea Acoustic Parameters Based on the Backward Feedback Neural Network Model. J. Mar. Sci. Eng. 2023, 11, 1340. https://doi.org/10.3390/jmse11071340
Zhu H, Cui Z, Liu J, Jiang S, Liu X, Wang J. A Method for Inverting Shallow Sea Acoustic Parameters Based on the Backward Feedback Neural Network Model. Journal of Marine Science and Engineering. 2023; 11(7):1340. https://doi.org/10.3390/jmse11071340
Chicago/Turabian StyleZhu, Hanhao, Zhiqiang Cui, Jia Liu, Shenghui Jiang, Xu Liu, and Jiahui Wang. 2023. "A Method for Inverting Shallow Sea Acoustic Parameters Based on the Backward Feedback Neural Network Model" Journal of Marine Science and Engineering 11, no. 7: 1340. https://doi.org/10.3390/jmse11071340