


A Subaperture Motion Compensation Algorithm for Wide-Beam, Multiple-Receiver SAS Systems
Abstract
:1. Introduction
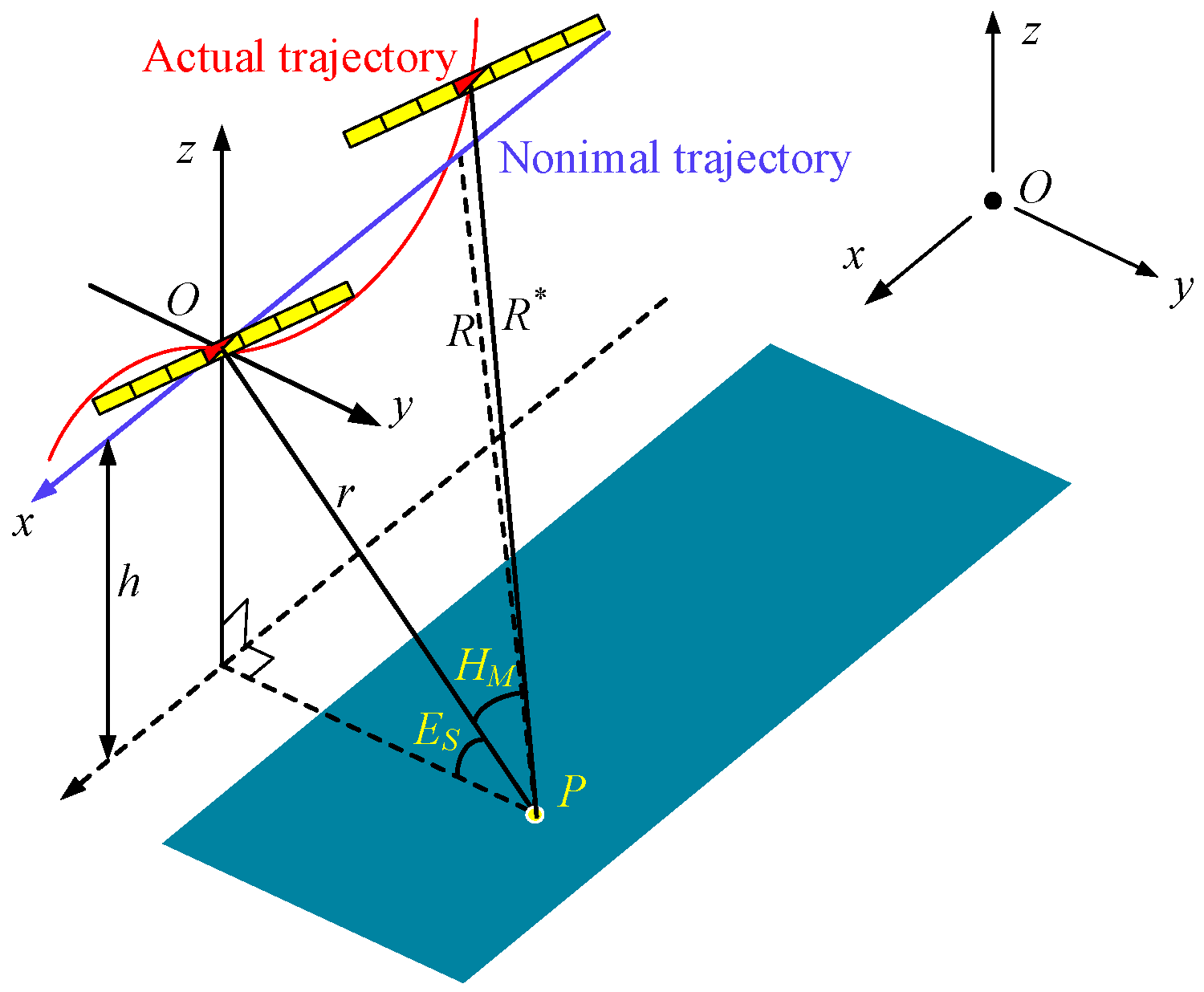
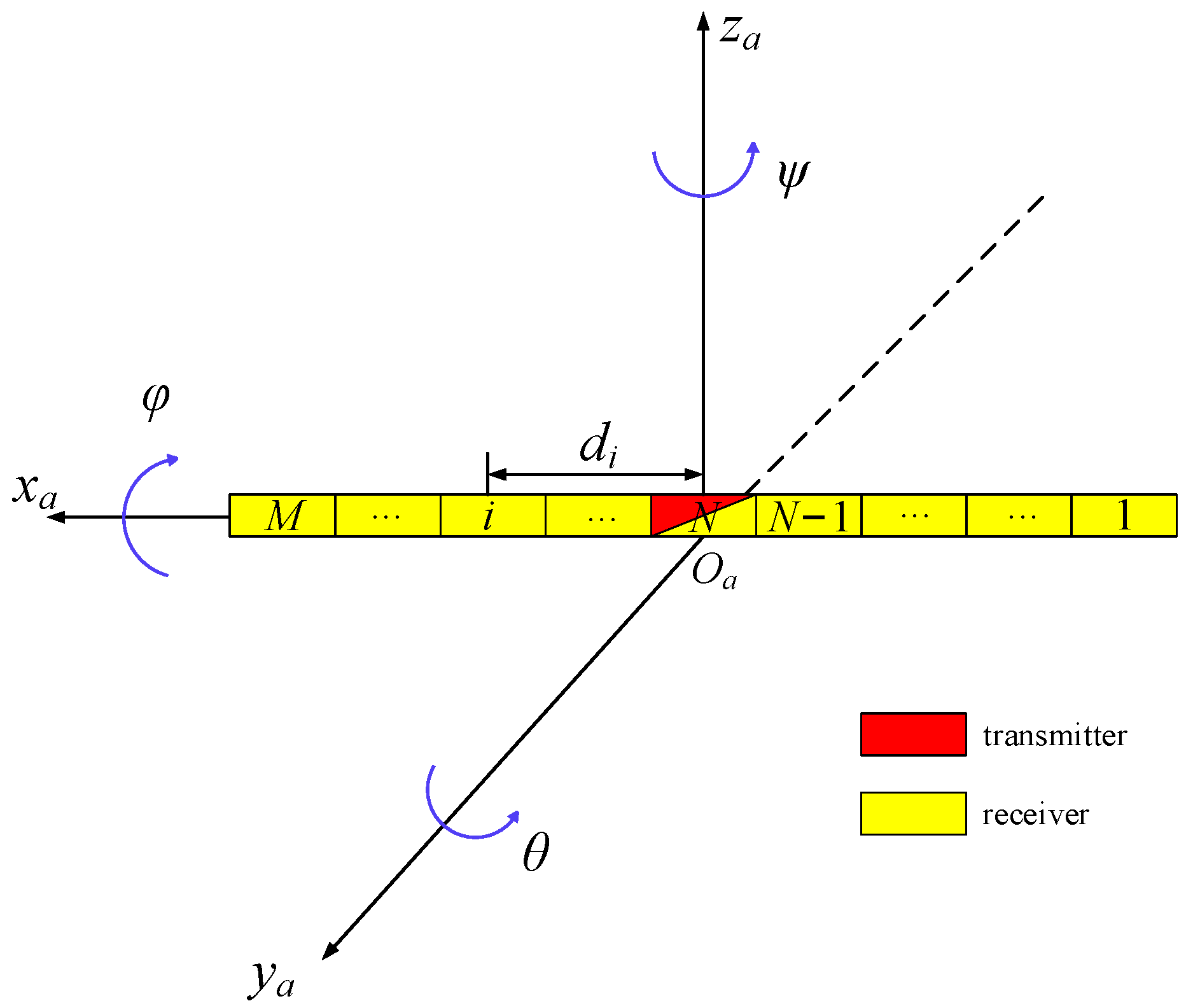
2. SAS Geometry and Exact Range History Error
3. Analysis of Range History Error
3.1. Decomposition of Range History Error
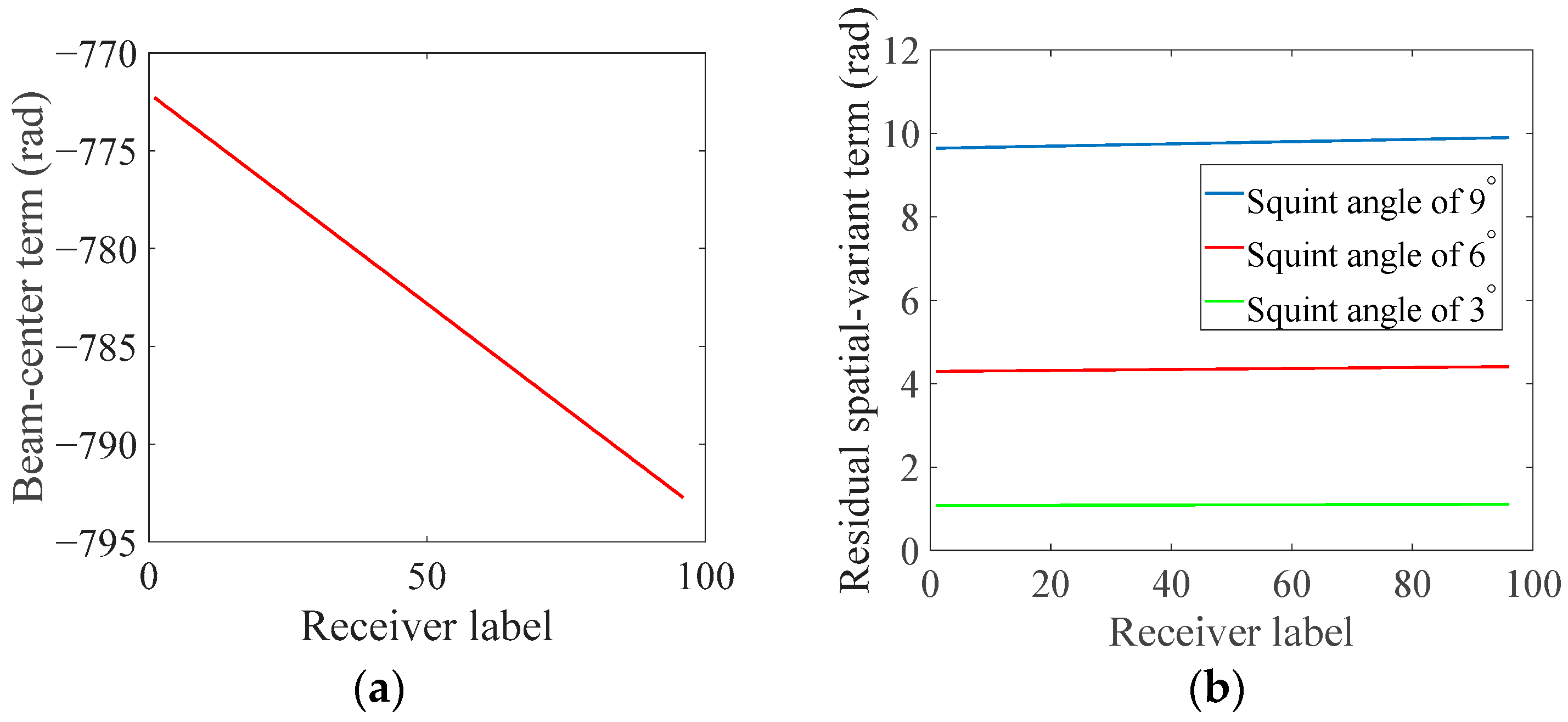
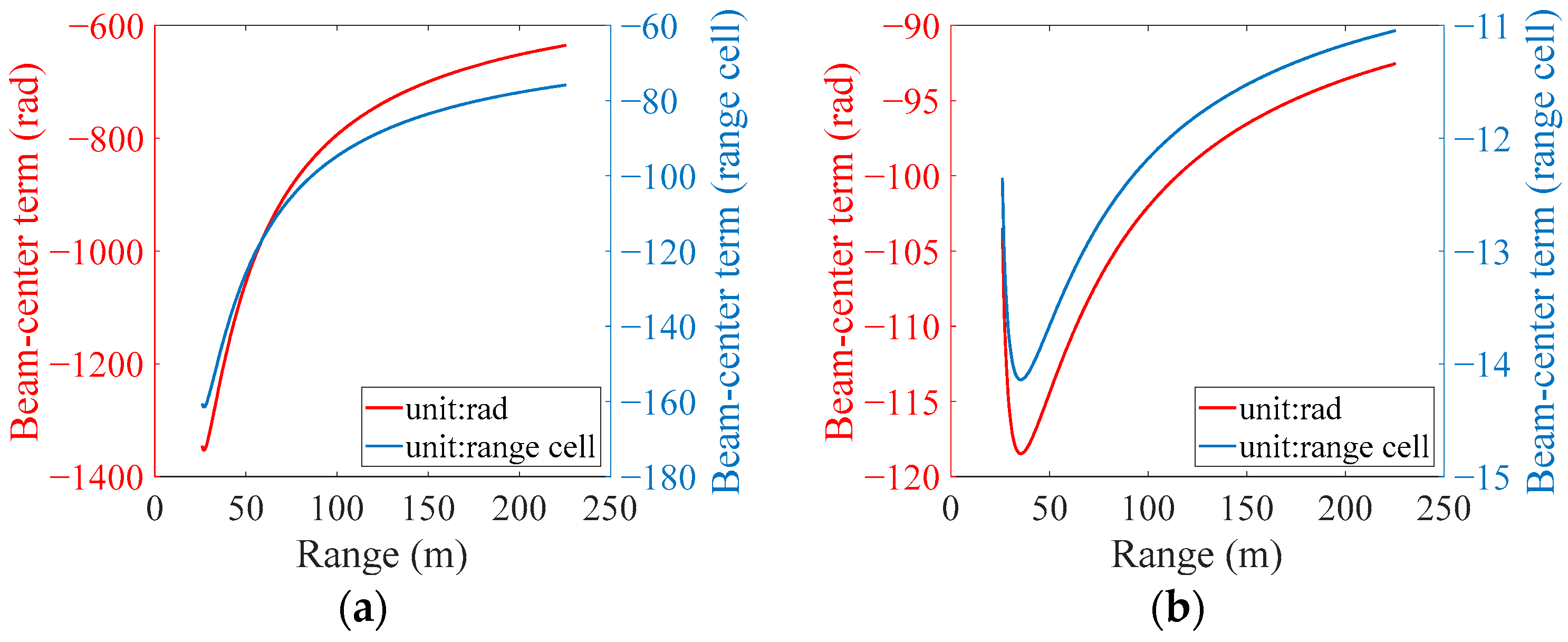
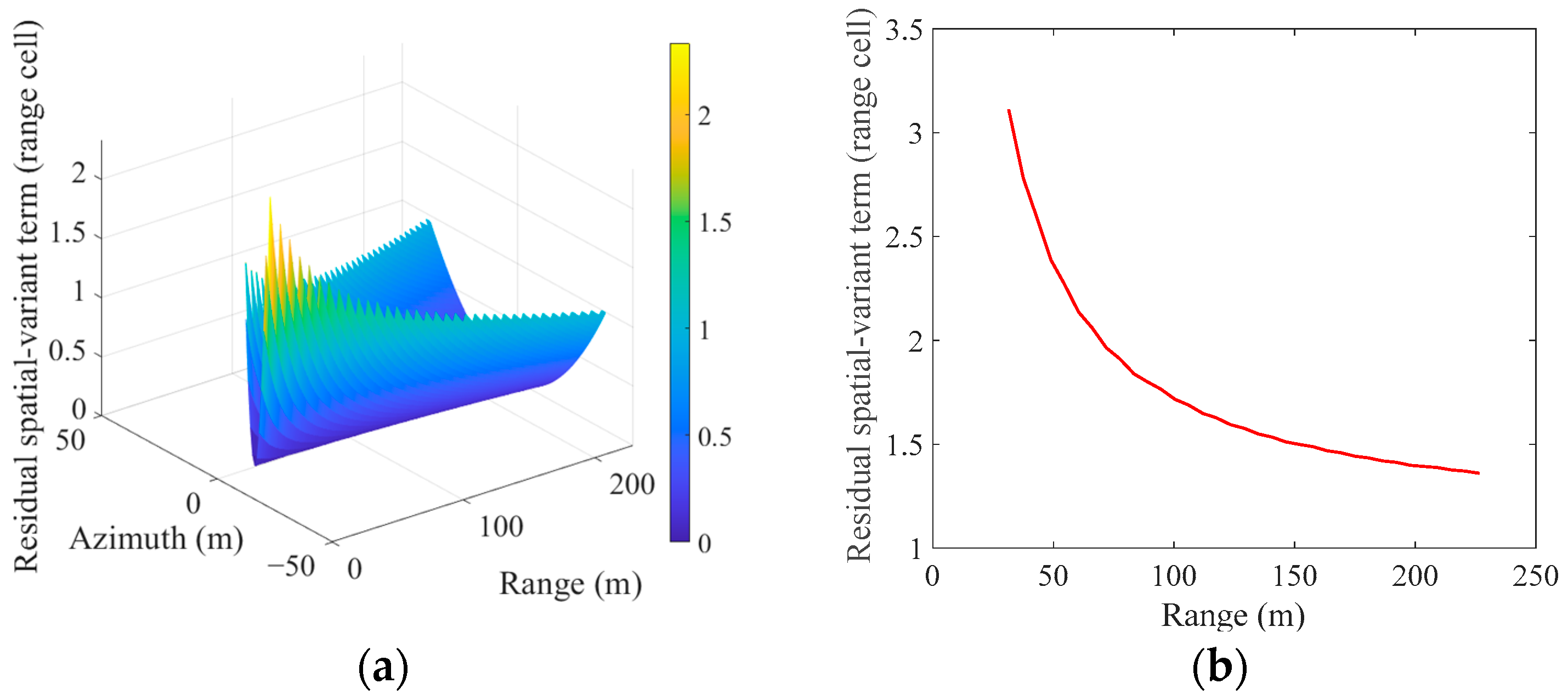
3.2. Spatial-Variant Characteristics of Range History Error
4. Subaperture MOCO Algorithm
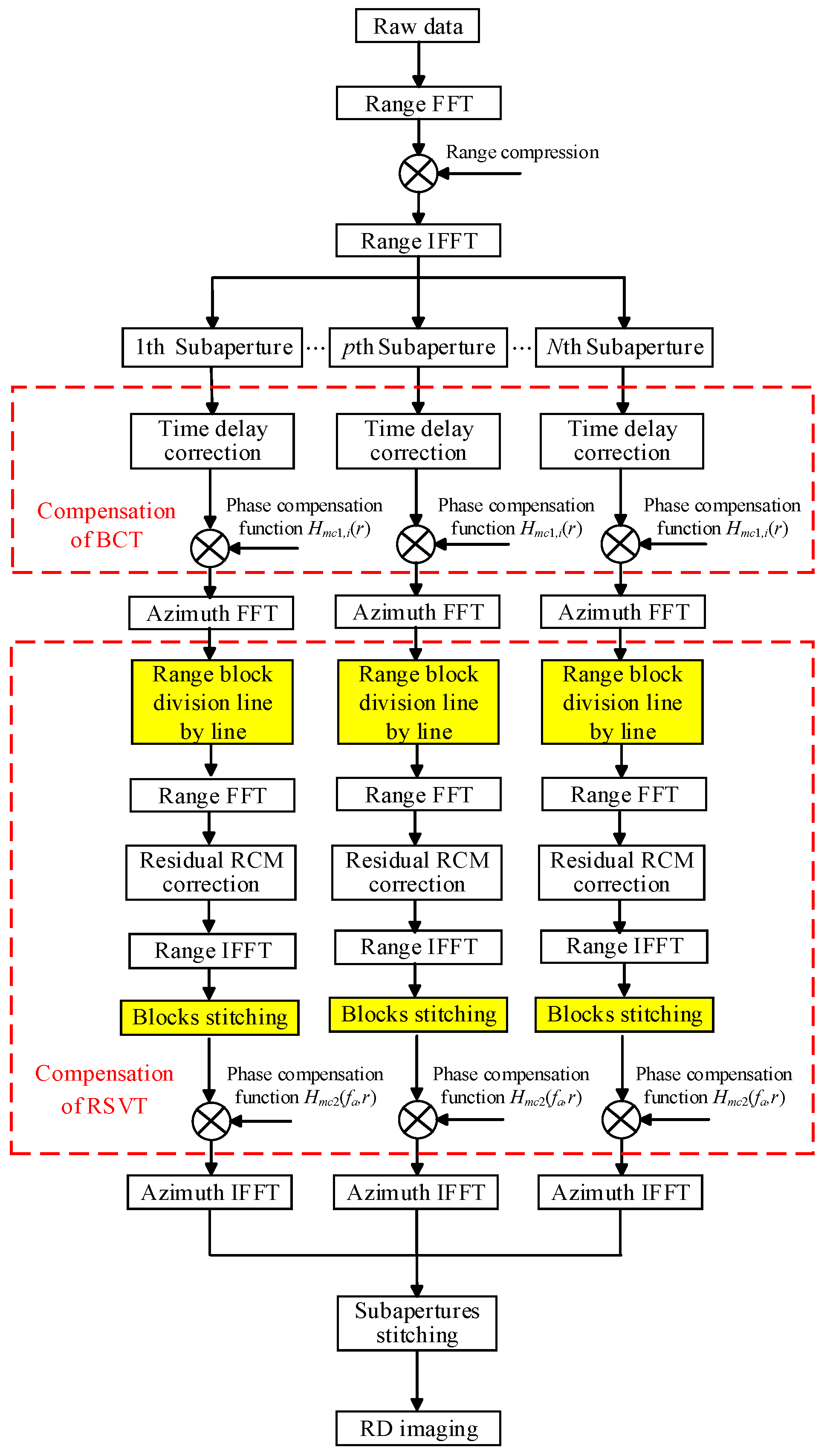
4.1. Algorithm Process
4.1.1. Compensation of BCT
4.1.2. Compensation of RSVT
4.1.3. Imaging
4.2. Applicable Conditions of the Algorithm
4.2.1. Reference Receiver Approximation Error
4.2.2. Angle Accommodation Error
4.3. Computational Efficiency
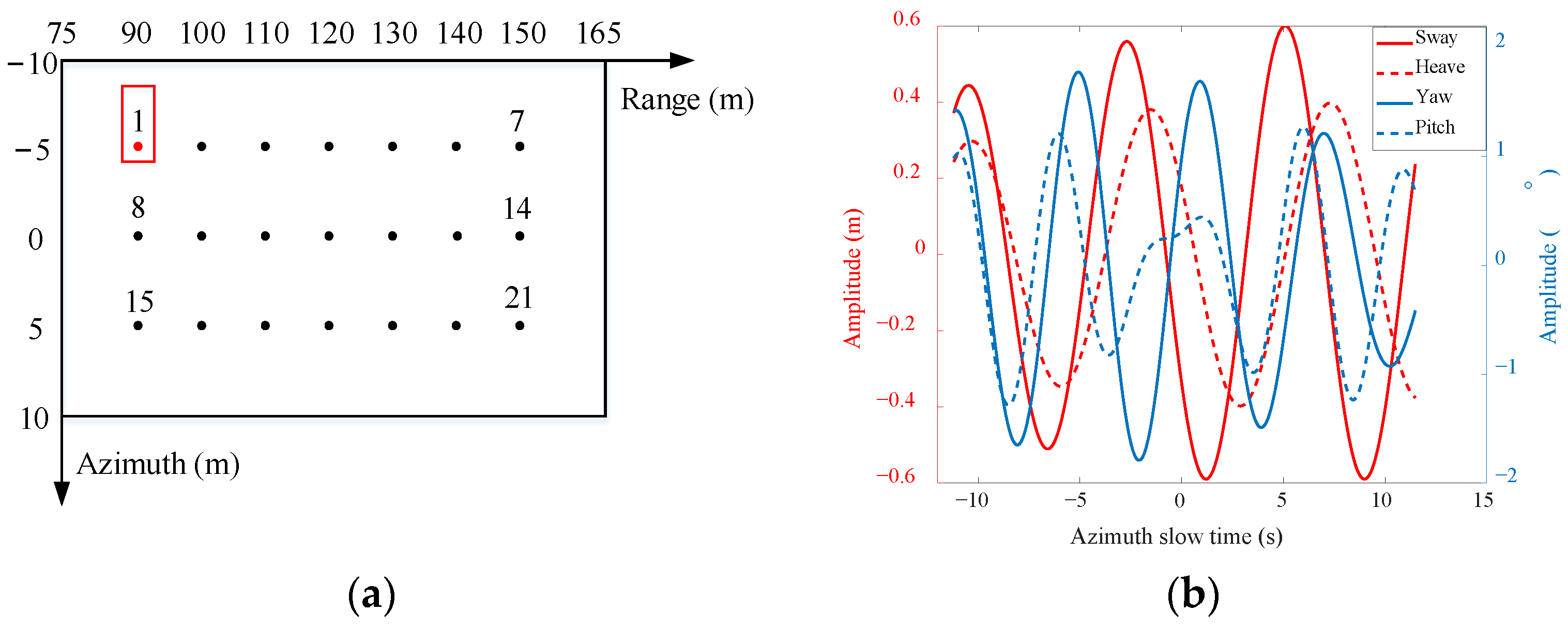
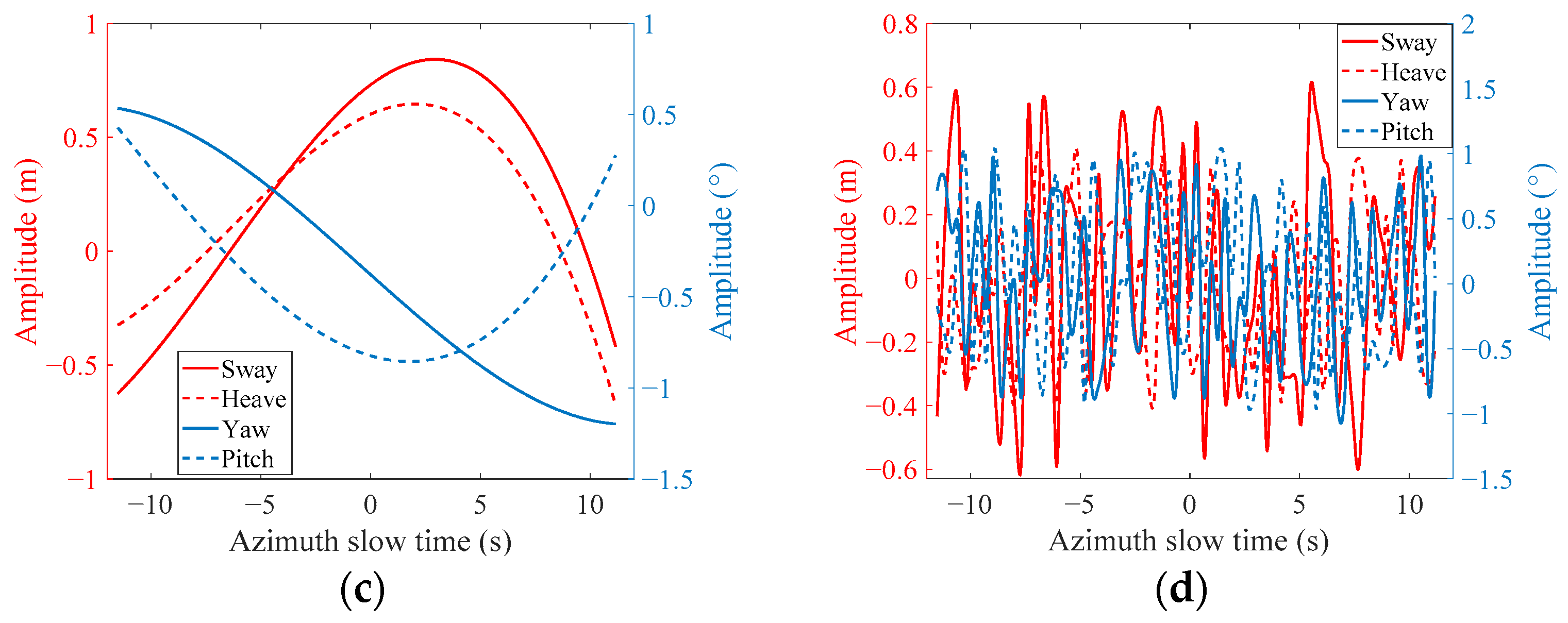
5. Experiments and Results
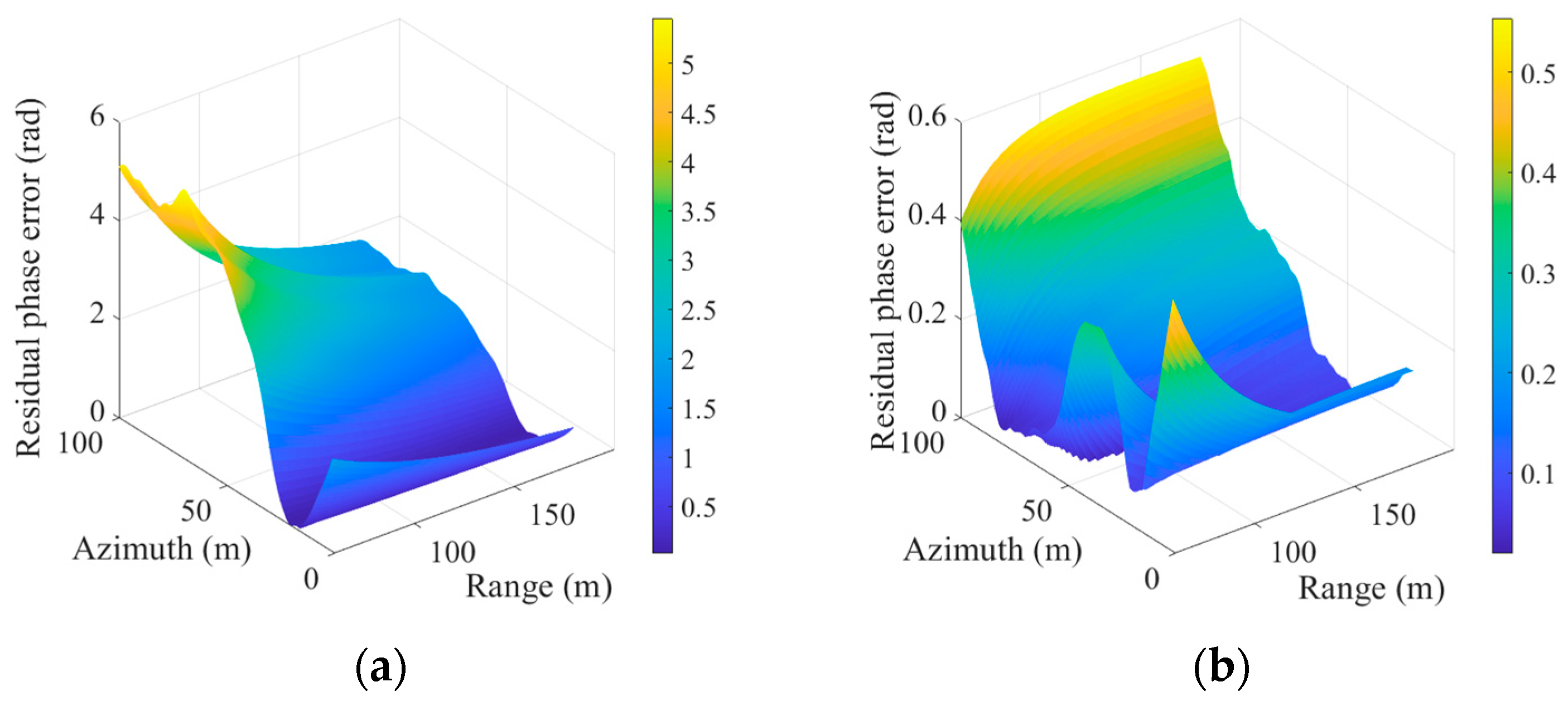
5.1. Residual Phase Error
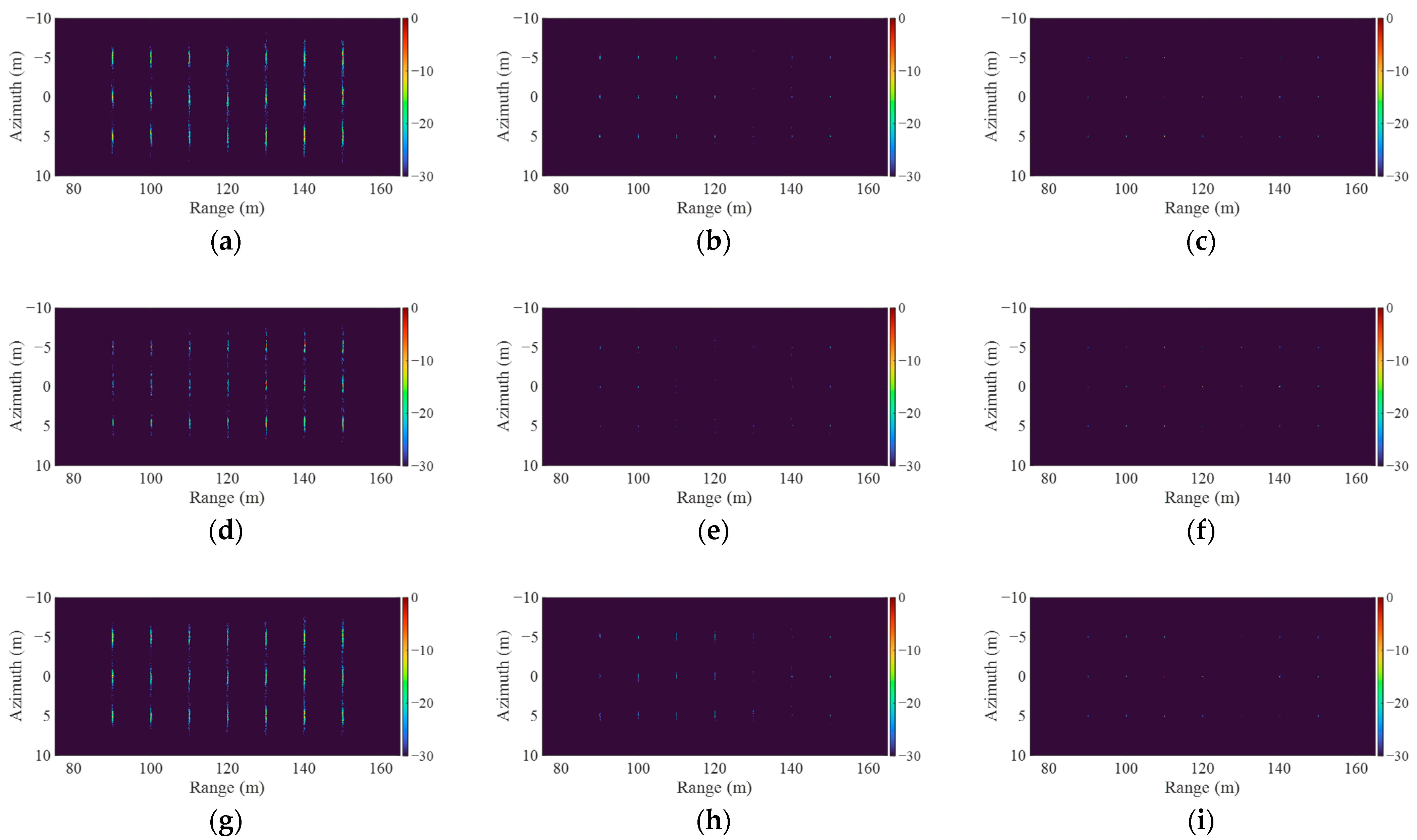
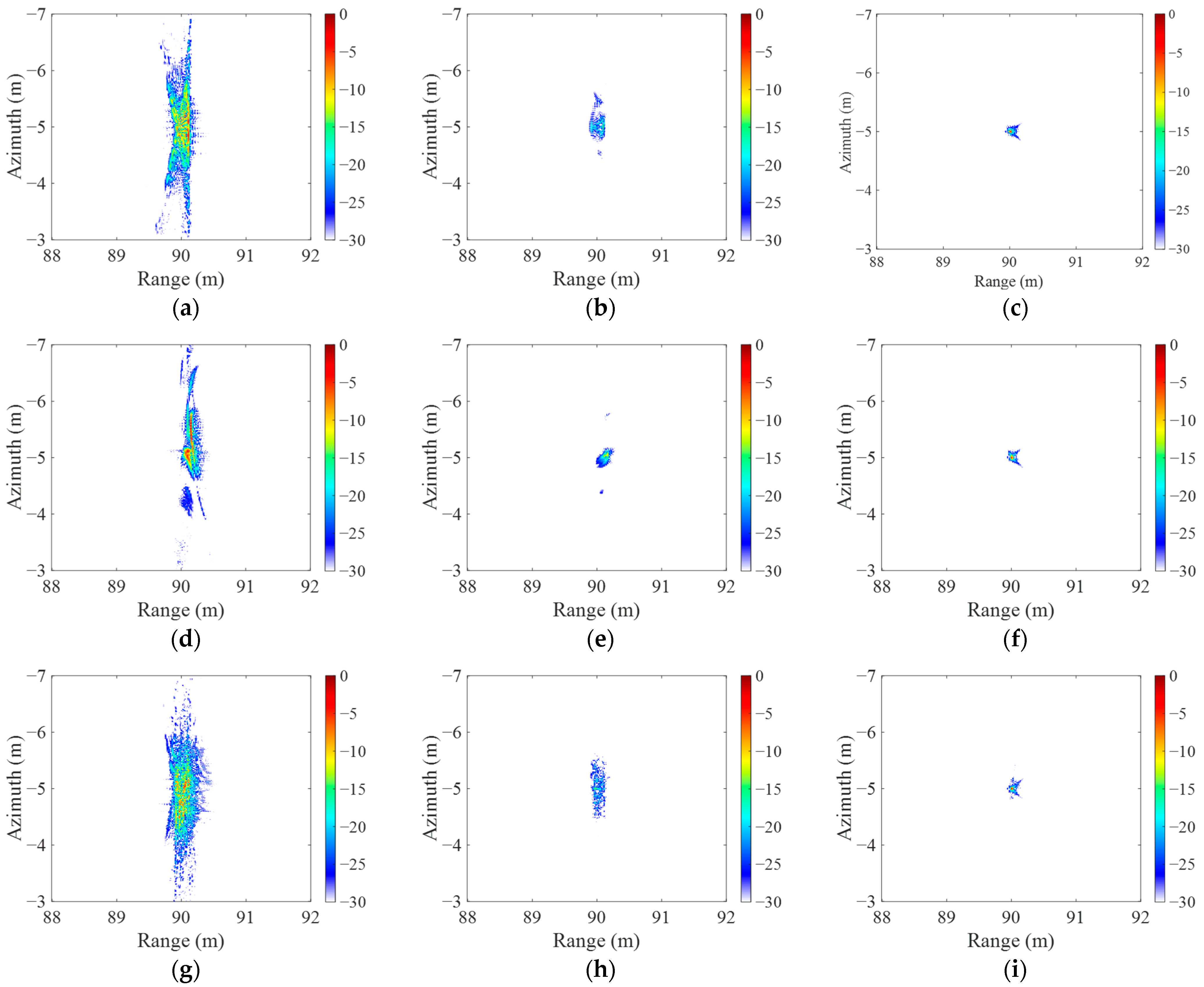
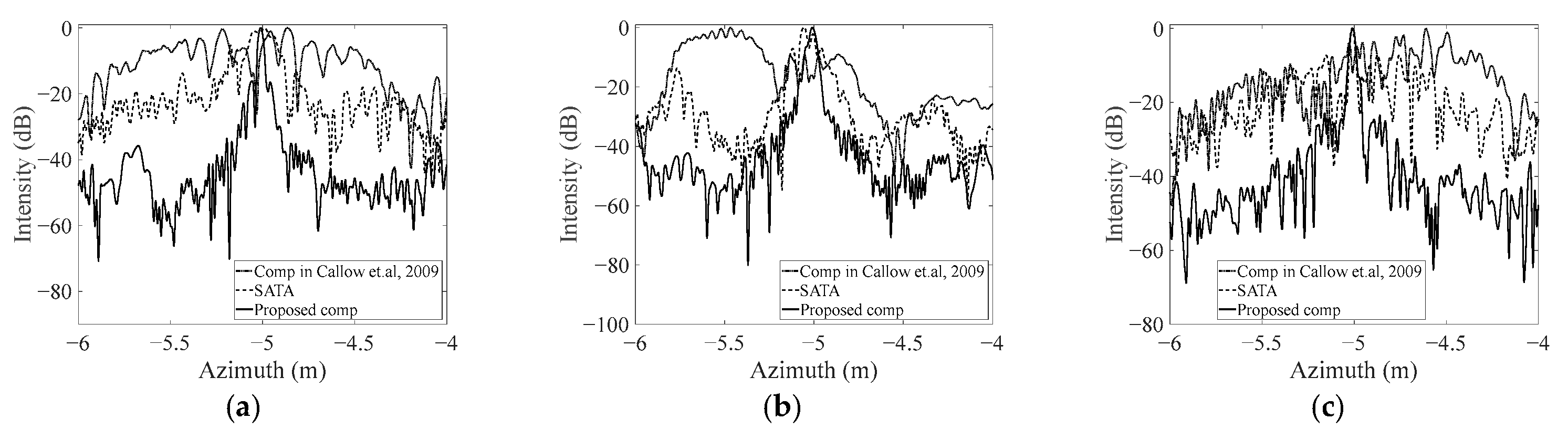
5.2. Ideal Point Target Imaging
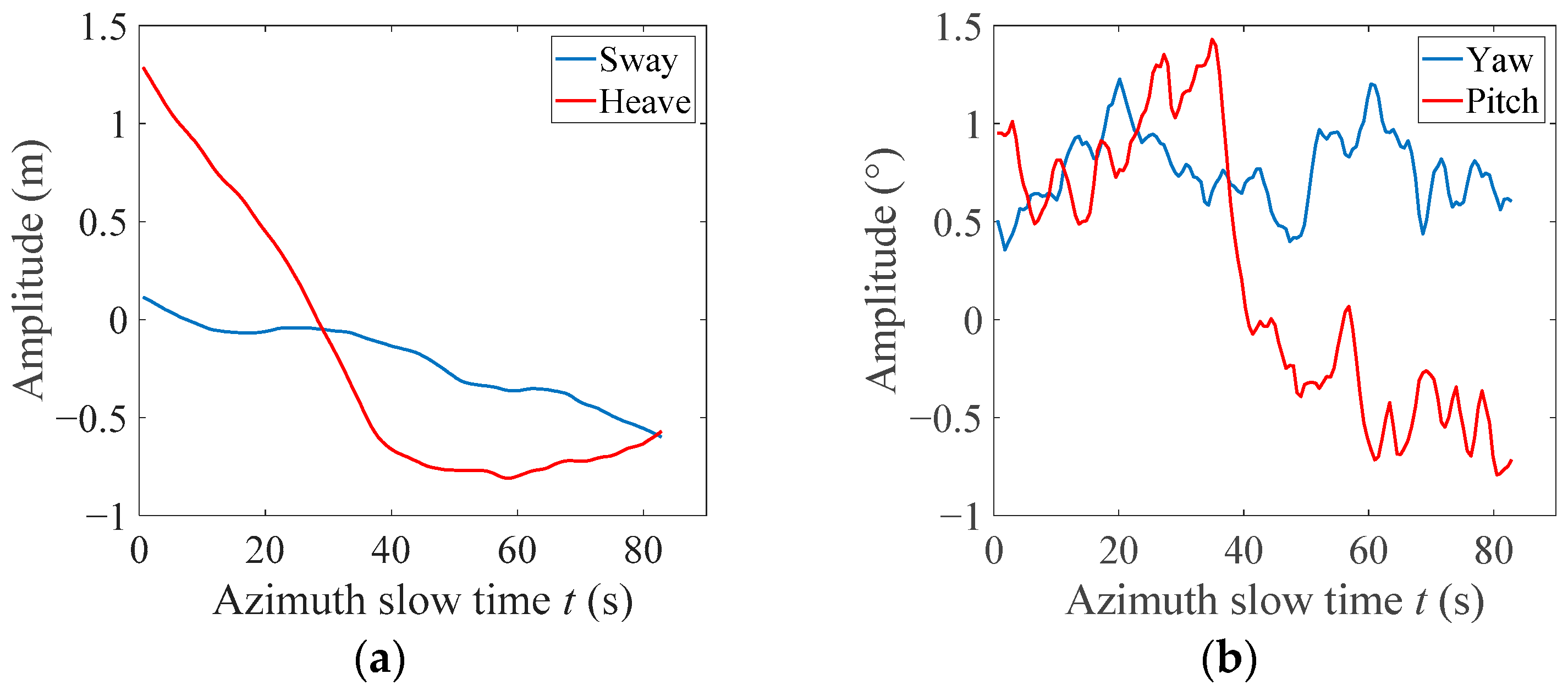
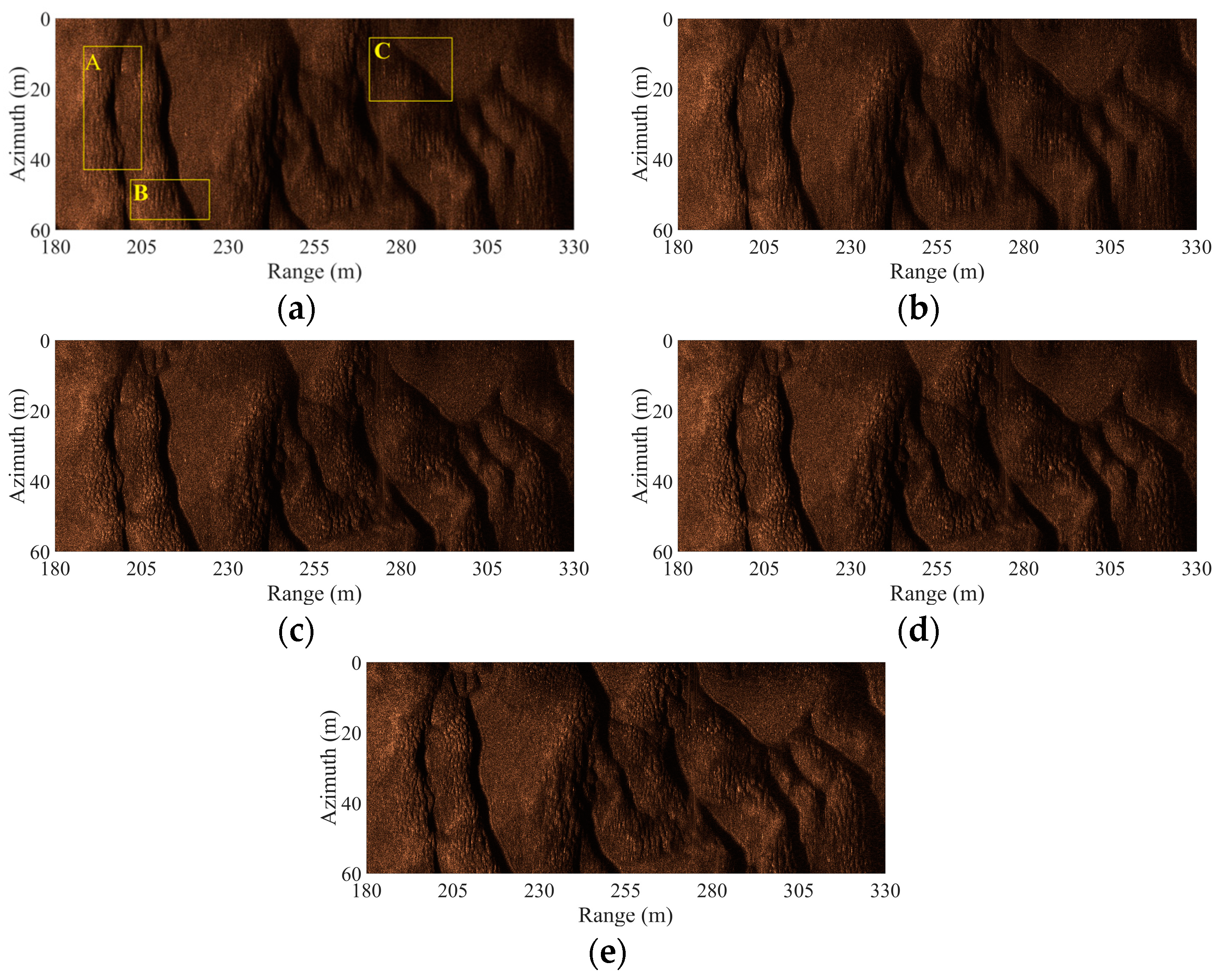
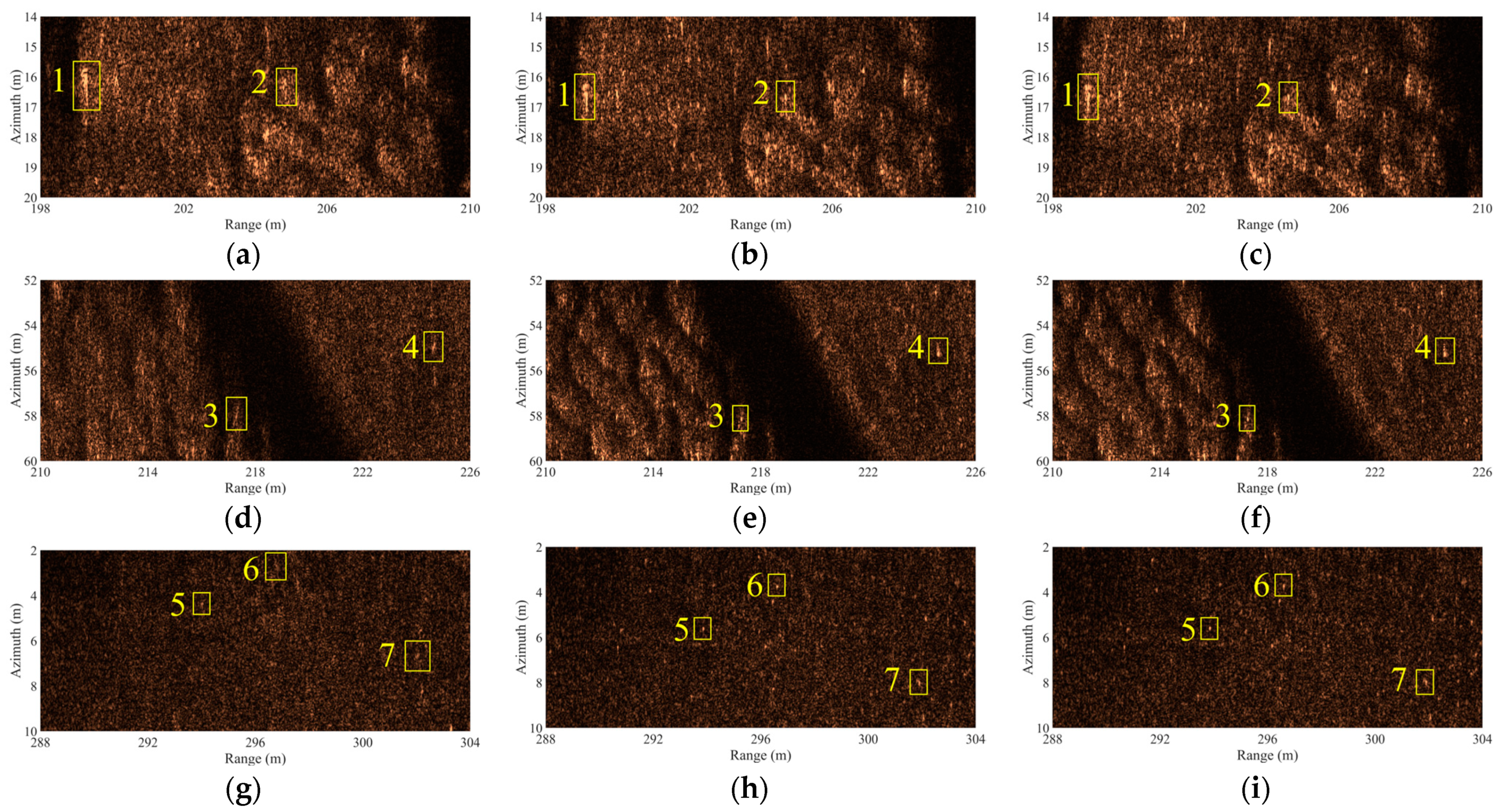
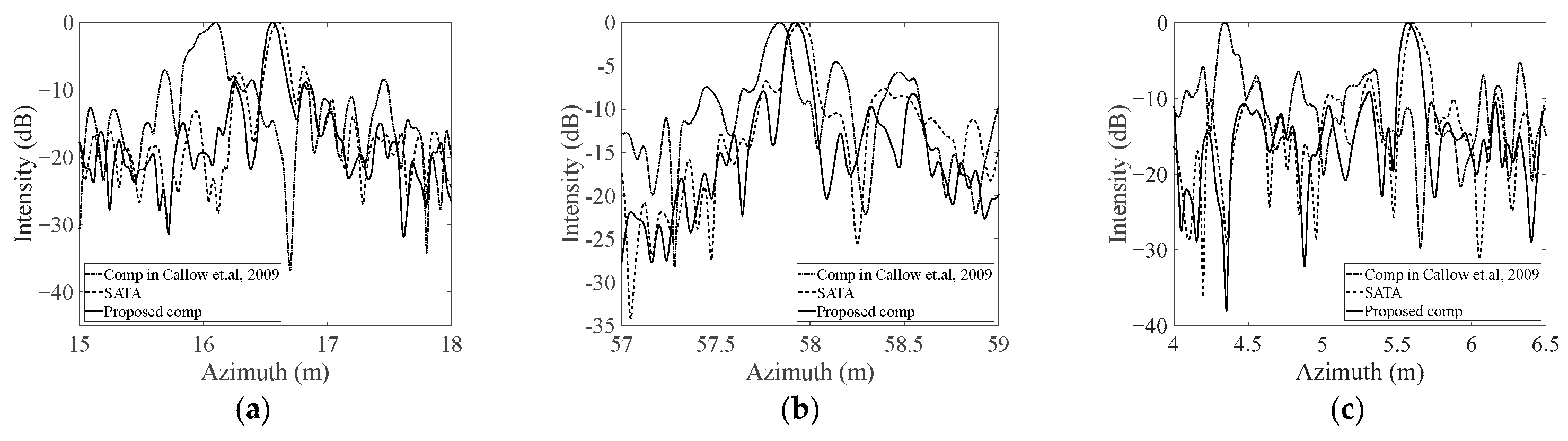
5.3. Real Experimental Data Imaging
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Hansen, R.E.; Callow, H.J.; Sæbø, T.O.; Synnes, S.A.V. Challenges in seafloor imaging and mapping with synthetic aperture sonar. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3677–3687. [Google Scholar] [CrossRef]
- Zhang, X.; Ying, W. Multireceiver SAS Imagery Based on Monostatic Conversion. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 10835–10853. [Google Scholar] [CrossRef]
- Zhang, P.; Tang, J.; Zhong, H.; Ning, M.; Liu, D.; Wu, K. Self-trained target detection of radar and sonar images using automatic deep learning. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4701914. [Google Scholar] [CrossRef]
- Zhang, X.; Ying, W. Wide-bandwidth Signal-based Multireceiver SAS Imagery Using Extended Chirp Scaling Algorithm. IET Radar Sonar Navig. 2022, 16, 531–541. [Google Scholar] [CrossRef]
- Raven, R.S. Electronic Stabilization for Displaced Phase Center Systems. U.S. Patent 4,244,036, 6 January 1981. [Google Scholar]
- Zhang, X.; Zhou, M. Multireceiver SAS Imagery with Generalized PCA. IEEE Geosci. Remote Sens. Lett. 2023, 20, 1502205. [Google Scholar] [CrossRef]
- Jiang, Z.; Liu, W.; Li, B.; Liu, J.; Zhang, C. A motion compensation method for synthetic aperture sonar based on segment displaced phases center algorithm and errors fitting. J. Electron. Inf. Technol. 2013, 35, 1185–1189. [Google Scholar] [CrossRef]
- Caporale, S.; Petillot, Y. A novel motion compensation approach for SAS. In Proceedings of the 2016 Sensor Signal Processing for Defence (SSPD), Edinburgh, UK, 22–23 September 2016; pp. 1–5. [Google Scholar]
- Leier, S.; Zoubir, A.M. Time delay estimation for motion compensation and bathymetry of SAS systems. In Proceedings of the 2012 20th European Signal Processing Conference (EUSIPCO), Bucharest, Romania, 27–31 August 2012; pp. 2293–2297. [Google Scholar]
- Huxtable, B.D.; Geyer, E.M. Motion compensation feasibility for high resolution synthetic aperture sonar. In Proceedings of the MTS/IEEE OCEANS Conference, Victoria, BC, Canada, 18–21 October 1993; Volume 1, pp. I125–I131. [Google Scholar]
- Callow, H.J.; Hayes, M.P.; Gough, P.T. Autofocus of stripmap SAS data using the range variant SPGA algorithm. In Proceedings of the MTS/IEEE OCEANS Conference, San Diego, CA, USA, 22–26 September 2003; Volume 5, pp. 2422–2426. [Google Scholar]
- Hansen, R.E.; Sæbø, T.O.; Gade, K.; Chapman, S. Signal processing for AUV based interferometric synthetic aperture sonar. In Proceedings of the IEEE/MTS OCEANS Conference, San Diego, CA, USA, 22–26 September 2003; Volume 5, pp. 2438–2444. [Google Scholar]
- Cook, D.A.; Christoff, J.T.; Fernandez, J.E. Motion compensation of AUV-based synthetic aperture sonar. In Proceedings of the MTS/IEEE OCEANS Conference, San Diego, CA, USA, 22–26 September 2003; Volume 4, pp. 2143–2148. [Google Scholar]
- Ma, M.; Tang, J.; Tian, Z.; Chen, Z. Motion compensation of multiple-receiver synthetic aperture sonar based on high-precision inertial navigation system. J. Huazhong Univ. Sci. Tech. (Nat. Sci. Ed.) 2020, 48, 73–78. [Google Scholar] [CrossRef]
- Li, H.; Tang, J.; Yuan, B. The integrated navigation underwater used in SAS motion compensation. In Proceedings of the 2009 Second International Conference on Intelligent Computation Technology and Automation, Changsha, China, 11 October 2009. [Google Scholar] [CrossRef]
- Huang, J.; Tang, J.; Wang, Q.; Wu, W. Motion Compensation in SAS with Multiple Receivers Based on ISCFT Imaging Algorithm. In Proceedings of the 2010 2nd International Conference on Information Engineering and Computer Science, Wuhan, China, 25–26 December 2010. [Google Scholar] [CrossRef]
- Ma, M.; Tang, J.; Tian, Z.; Zhong, H. Trajectory deviations in narrow-beam SAS: Analysis and compensation. In Proceedings of the 2018 11th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Beijing, China, 13–15 October 2018. [Google Scholar]
- Callow, H.J.; Hayes, M.P.; Gough, P.T. Motion-compensation improvement for widebeam, multiple-receiver SAS systems. IEEE J. Ocean. Eng. 2009, 34, 262–268. [Google Scholar] [CrossRef]
- Zhu, S.; Hu, J.; Tang, J.; Zhang, S. Simulation of SAS angular motion compensation. J. Syst. Simul. 2009, 21, 6564–6567. [Google Scholar] [CrossRef]
- Yin, H.; Liu, J.; Zhang, C. Motion compensation of synthetic aperture sonar based on inertial measuring system. J. Electron. Inf. Technol. 2007, 29, 63–66. [Google Scholar]
- Wu, H.; Tang, J.; Zhong, H.; Tong, Y. An azimuth-variant yaw angle compensation algorithm for multi-aperture synthetic aperture sonar with narrow beam. J. Nav. Univ. Eng. 2019, 31, 37–43. [Google Scholar] [CrossRef]
- Wilkinson, D.R. Efficient Image Reconstruction Techniques for a Multiple-Receiver Synthetic Aperture Sonar. Master’s Thesis, Department of Electrical and Computer Engineering, University of Canterbury, Christchurch, New Zealand, 2001. [Google Scholar]
- Moreira, A.; Mittermayer, J.; Scheiber, R. Extended Chirp Scaling Algorithm for Air- and Spaceborne SAR Data Processing in Stripmap and ScanSAR Imaging Modes. IEEE Trans. Geosci. Remote Sens. 1996, 34, 1123–1136. [Google Scholar] [CrossRef]
- Yang, M.; Zhu, D.; Song, W. Comparison of two-step and one-step motion compensation algorithms for airborne synthetic aperture radar. Electron. Lett. 2015, 51, 1108–1110. [Google Scholar] [CrossRef]
- Callow, H.J. Signal Processing for Synthetic Aperture Sonar Image Enhancement. Ph.D. Thesis, Dept. Electr. Electron. Eng., Univ. Canterbury, Christchurch, New Zealand, 2003. [Google Scholar]
- Sæbø, T.O.; Langli, B.; Callow, H.J.; Hammerstad, E.O.; Hansen, R.E. Bathymetric capabilities of the HISAS interferometric synthetic aperture sonar. In Proceedings of the MTS/IEEE OCEANS Conference, Vancouver, BC, Canada, 29 September–4 October 2007; pp. 1–10. [Google Scholar]
- Châtillon, J.; Adams, A.E.; Lawlor, M.A.; Zakharia, M.E. SAMI: A low-frequency prototype for mapping and imaging of the seabed by means of synthetic aperture. IEEE J. Ocean. Eng. 1999, 24, 4–15. [Google Scholar] [CrossRef]
- Warman, K.; Chick, K.; Chang, E. Synthetic aperture sonar processing for widebeam/broadband data. In Proceedings of the MTS/IEEE OCEANS Conference, Honolulu, HI, USA, 5–8 November 2001; Volume 1, pp. 208–211. [Google Scholar]
- Hayes, M.P.; Gough, P.T. Synthetic aperture sonar: A review of current status. IEEE J. Ocean. Eng. 2009, 34, 207–224. [Google Scholar] [CrossRef]
- Potsis, A.; Reigber, A.; Mittermayer, J.; Moreira, A.; Uzunoglou, N. Sub-aperture algorithm for motion compensation improvement in wide-beam SAR data processing. Electron. Lett. 2001, 37, 1405–1407. [Google Scholar] [CrossRef]
- Prats, P.; Reigber, A.; Mallorqui, J.J. Topography-dependent motion compensation for repeat-pass interferometric SAR systems. IEEE Geosci. Remote Sens. Lett. 2005, 2, 206–210. [Google Scholar] [CrossRef]
- Scheiber, R.; Bothale, V.M. Interferometric multi-look techniques for SAR data. In Proceedings of the IEEE IGARSS, Toronto, ON, Canada, 24–28 June 2002; Volume 1, pp. 173–175. [Google Scholar]
- Zheng, X.; Yu, W.; Li, Z. A novel algorithm for wide beam SAR motion compensation based on frequency division. In Proceedings of the IGARSS, Denver, CO, USA, 31 July–4 August 2006; pp. 3160–3163. [Google Scholar]
- de Macedo, K.A.C.; Scheiber, R. Precise topography- and aperture-dependent motion compensation for airborne SAR. IEEE Geosci. Remote Sens. Lett. 2005, 2, 172–176. [Google Scholar] [CrossRef]
- Prats, P.; de Macedo, K.A.C.; Reigber, A.; Scheiber, R.; Scheiber, R. Comparison of topography- and aperture-dependent motion compensation algorithms for airborne SAR. IEEE Geosci. Remote Sens. Lett. 2007, 4, 349–353. [Google Scholar] [CrossRef]
- Zhang, X.; Tang, J.; Zhong, H.; Zhang, S. Wavenumber-domain imaging algorithm for wide-beam multi-receiver synthetic aperture sonar. J. Harbin Eng. Univ. 2014, 35, 93–101. [Google Scholar]
- Bamler, R. A comparison of range-Doppler and wavenumber domain SAR focusing algorithms. IEEE Trans. Geosci. Remote Sens. 1992, 30, 706–713. [Google Scholar] [CrossRef]
- Kirk, J.C. Motion compensation for synthetic aperture radar. IEEE Trans. Aerosp. Electron. Syst. 1975, AES-11, 338–348. [Google Scholar] [CrossRef]
- Xue, G. Research of Motion Compensation in Airborne UWB SAR with High Resolution. Ph.D. Thesis, National University of Defense Technology, Changsha, China, 2008. [Google Scholar]
- Xu, J.; Tang, J.; Zhang, C.; Zhou, S.; Zhou, L. Multi-aperture synthetic aperture sonar imaging algorithm. Signal Process. 2003, 19, 157–160. [Google Scholar] [CrossRef]
- Hagen, P.E.; Hansen, R.E. Post-mission analysis with the HUGIN AUV and high-resolution interferometric SAS. In Proceedings of the MTS/IEEE OCEANS Conference, Boston, MA, USA, 18–22 September 2006; pp. 1–6. [Google Scholar]
- Wang, Z.; Bovik, A.C. A universal image quality index. IEEE Signal Process. Lett. 2002, 9, 81–84. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| signal carrier frequency | 100 kHz | length of transmitter | 0.04 m |
| signal time width | 20 ms | length of receiver | 0.02 m |
| signal bandwidth | 37.5 kHz | number of receivers | 96 |
| signal sampling frequency | 56.25 kHz | platform velocity | 3 m/s |
| pulse repetition interval | 0.32 s | distance to the seabed | 25 m |
| Motion Errors | Algorithm | IRW (cm) | PSLR (dB) | ISLR (dB) | Time (s) |
|---|---|---|---|---|---|
| Sinusoidal | Proposed algorithm | 3.07 | −16.24 | −13.05 | 28.64 |
| SATA | 14.45 | −5.66 | −7.48 | 16.62 | |
| Cubic polynomial | Proposed algorithm | 3.95 | −17.29 | −18.66 | 28.94 |
| SATA | 8.01 | −6.75 | −4.65 | 16.45 | |
| Uniform random | Proposed algorithm | 3.18 | −22.98 | −16.50 | 30.93 |
| SATA | 2.50 | −7.33 | 2.99 | 16.52 |
| Algorithm | Time (s) | SSIM | Target | IRW (cm) | PSLR (dB) | ISLR (dB) |
|---|---|---|---|---|---|---|
| Compensation in [18] | 4.98 | 0.34 | 1 | 27.15 | −7.97 | −3.83 |
| 3 | 15.60 | −4.53 | −0.12 | |||
| 5 | 10.61 | −4.17 | 1.17 | |||
| SATA | 2.73 | 0.49 | 1 | 15.87 | −6.56 | −3.59 |
| 3 | 15.56 | −6.77 | −2.19 | |||
| 5 | 15.01 | −7.26 | −2.91 | |||
| Proposed compensation | 4.67 | 0.57 | 1 | 13.55 | −8.77 | −4.26 |
| 3 | 12.70 | −7.92 | −3.37 | |||
| 5 | 13.34 | −9.13 | −4.44 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Cheng, G.; Tang, J.; Wu, H.; Tian, Z. A Subaperture Motion Compensation Algorithm for Wide-Beam, Multiple-Receiver SAS Systems. J. Mar. Sci. Eng. 2023, 11, 1627. https://doi.org/10.3390/jmse11081627
Zhang J, Cheng G, Tang J, Wu H, Tian Z. A Subaperture Motion Compensation Algorithm for Wide-Beam, Multiple-Receiver SAS Systems. Journal of Marine Science and Engineering. 2023; 11(8):1627. https://doi.org/10.3390/jmse11081627
Chicago/Turabian StyleZhang, Jiafeng, Guangli Cheng, Jinsong Tang, Haoran Wu, and Zhen Tian. 2023. "A Subaperture Motion Compensation Algorithm for Wide-Beam, Multiple-Receiver SAS Systems" Journal of Marine Science and Engineering 11, no. 8: 1627. https://doi.org/10.3390/jmse11081627