

Designing Protograph LDPC Codes for Differential Chaotic Bit-Interleaved Coded Modulation System for Underwater Acoustic Communications
 , , ,
, , ,
Abstract
:1. Introduction
1.1. Existing Coding Schemes for UWA Communications
1.2. The Coding Schemes for the DCSK-Based Systems
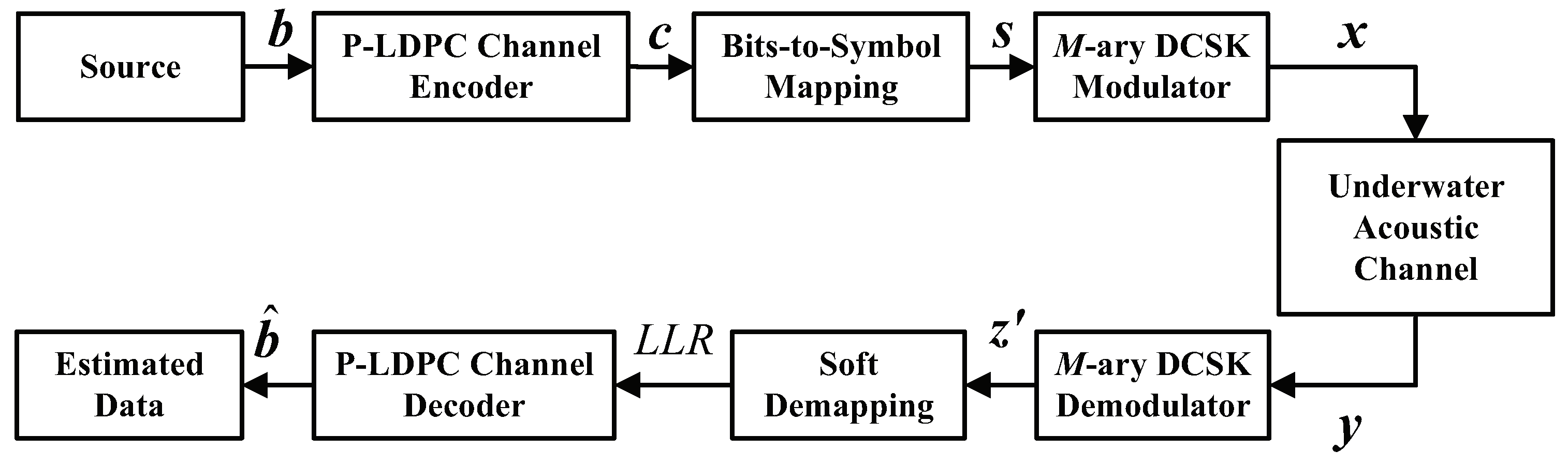
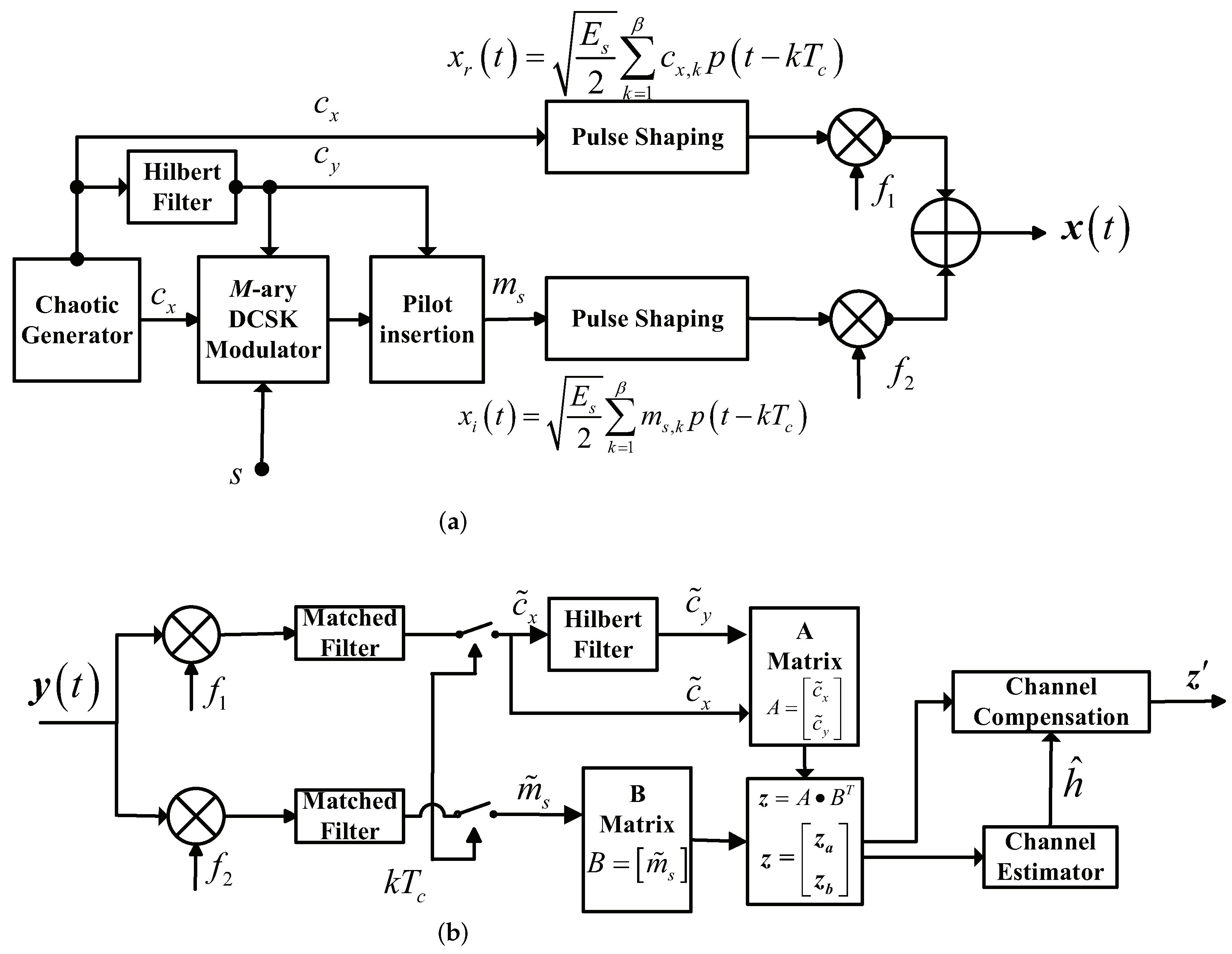
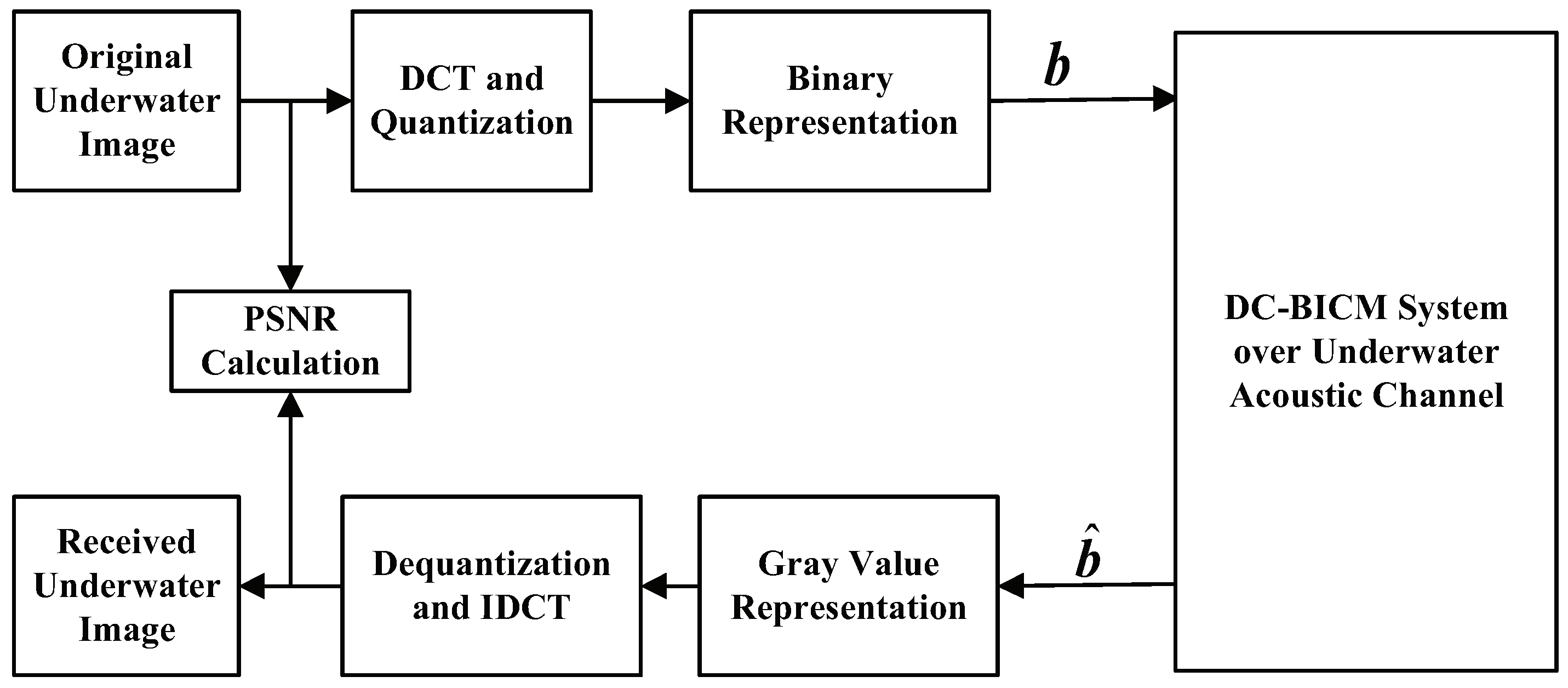
2. The DC-BICM System over Underwater Acoustic Channels
- Step 1.
- Initialization. The LLRs obtained from the soft demapping module in the DC-BICM system (Equation (9)) feeds into the P-LDPC channel decoder to initialize the LLR messages in the decoder.
- Step 2.
- LLRs updating. This step consists of two kinds of message-updating processes. The first is the check-to-variable (CTV) message updating from the check node (CN) to the variable node (VN) in the P-LDPC codes, and the second is the variable-to-check (VTC) message updating from the VN to the CN in the P-LDPC codes. The two procedures run in turn.
- Step 3.
- Termination decision. When the maximum iteration number is reached or the decoded sequence satisfies the parity-check equation, the iteration of Step 2 will terminate. Otherwise, the iteration between the CTV message updating and VTC message updating in Step 2 will continue.
- Step 4.
- Output. When the iteration stops, the decoded sequence will output as the estimated source sequence.
3. Proposed Design of Protograph LDPC Codes for the DC-BICM-System-Based UWA Communications
| Algorithm 1: The Proposed Design Framework of P-LDPC Codes for the DC-BICM System over UWA Channels |
| Initialization: |
|
| Code Design Process: |
|
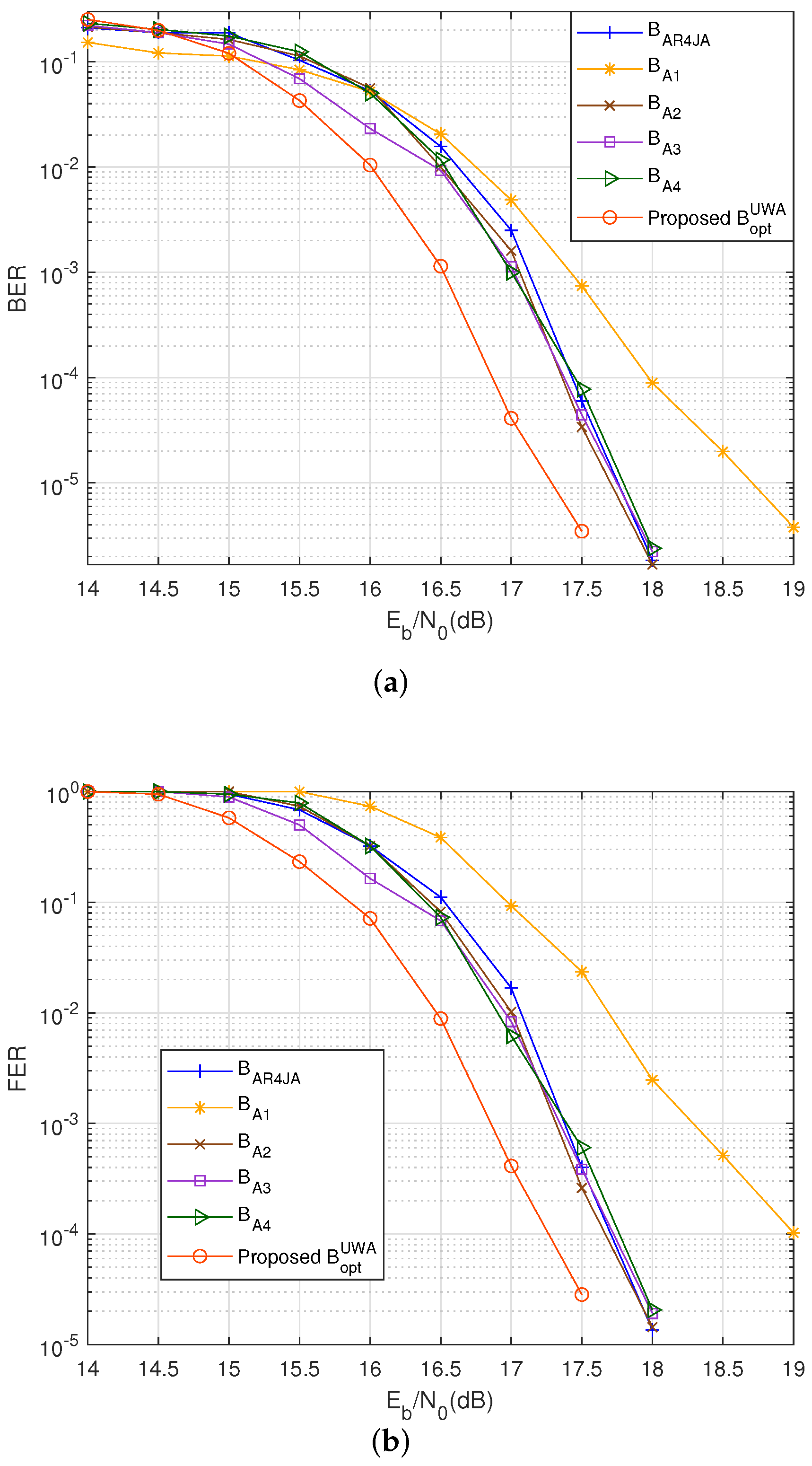
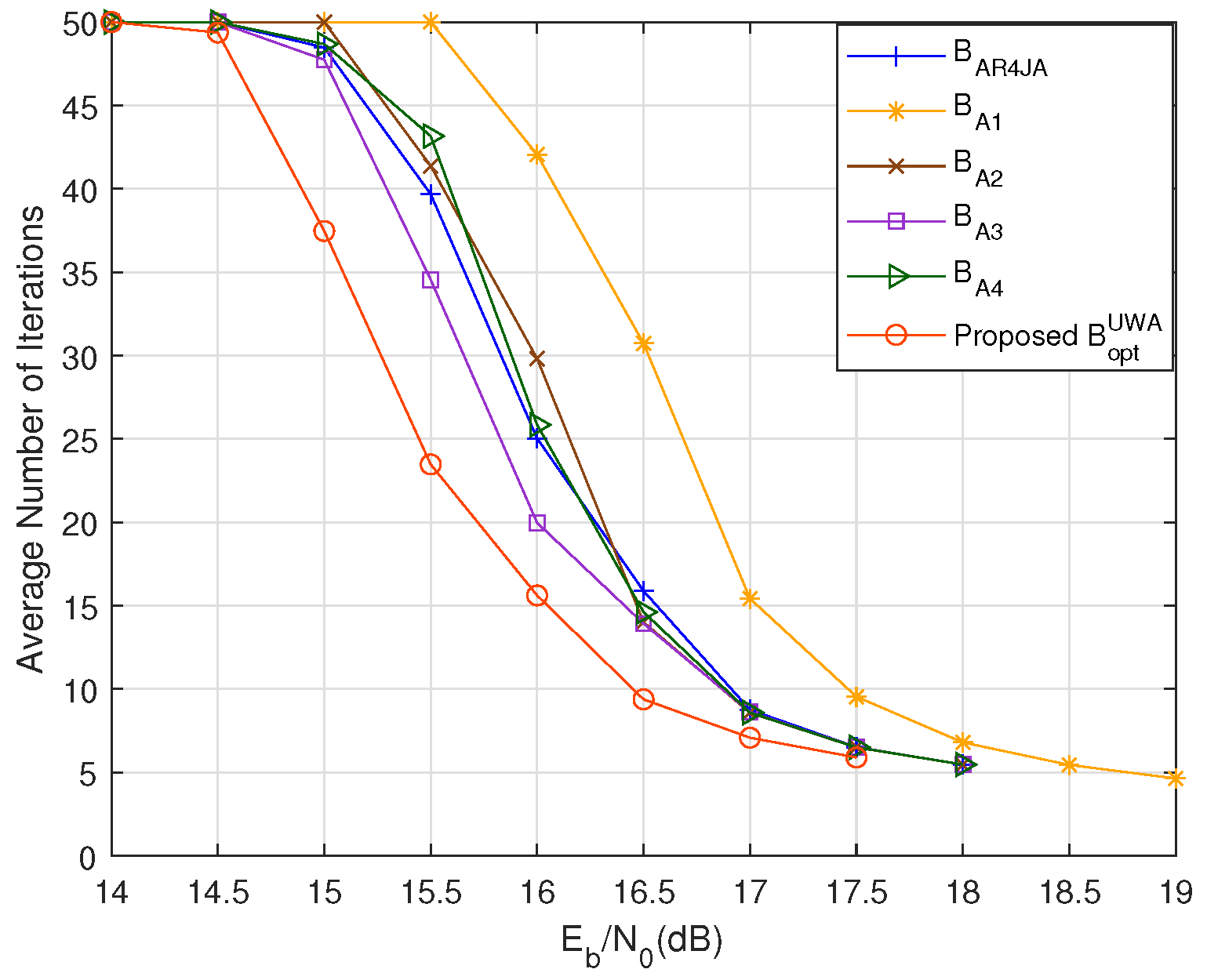
4. Simulation Results and Discussions
4.1. Performance Comparison
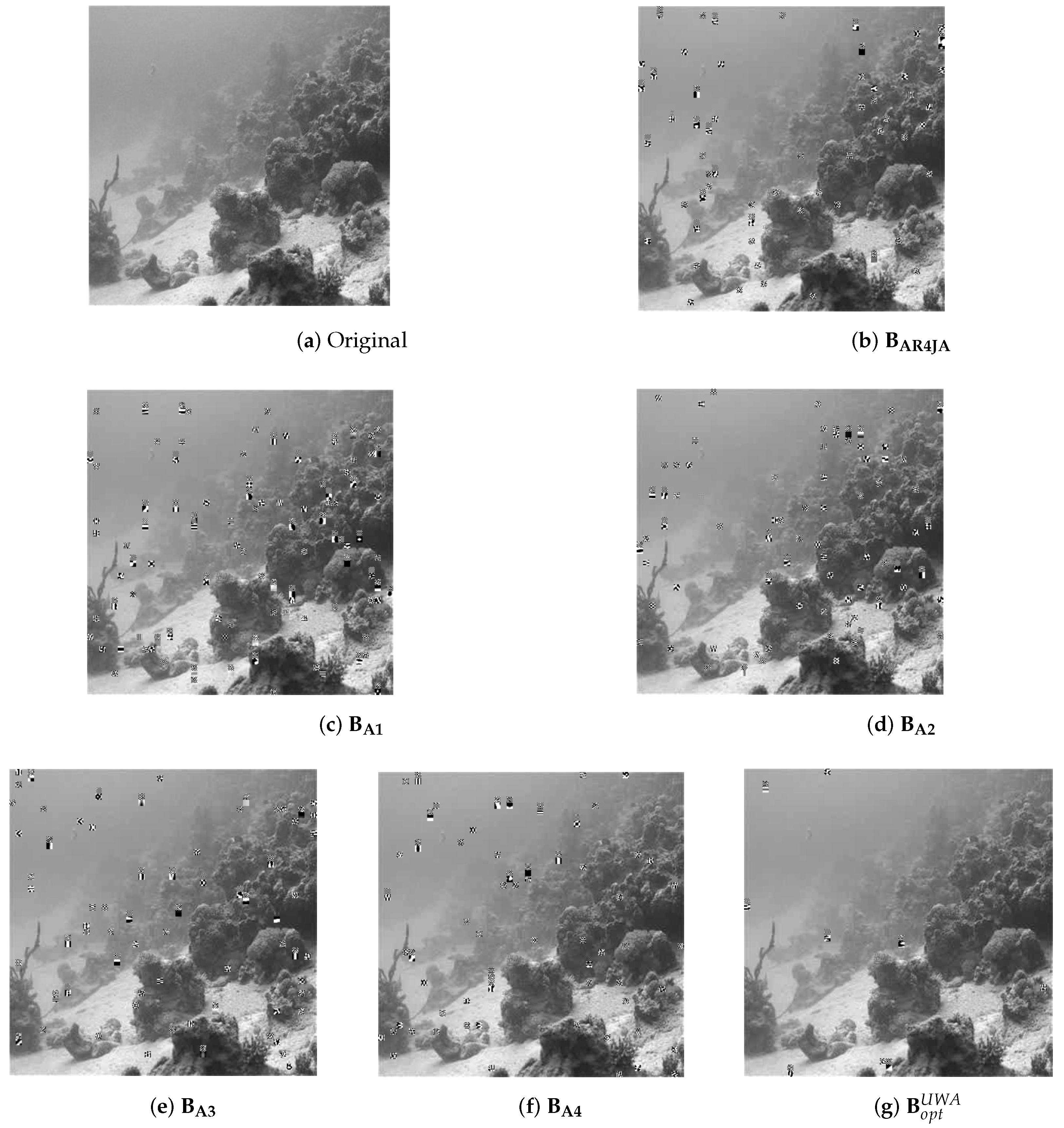
4.2. Underwater Image Transmission Comparisons
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| UWA | Underwater Acoustic |
| DC-BICM | Differential Chaotic Bit-interleaved Coded Modulation |
| UASs | Underwater Acoustic Sensor networks |
| IoT | Internet of Things |
| UIoT | Underwater Internet of Things |
| CDSSS | Chaotic Direct-Sequence Spread Spectrum |
| DCSK | Differential Chaos Shift Keying |
| OFDM | Orthogonal Frequency-division Multiplexing |
| LDPC | Low-Density Parity Check |
| P-LDPC | Protograph Low-Density Parity Check |
| EXIT | Extrinsic Information Transfer |
| TC-DCM | Trellis-Coded Differential Chaotic Modulation |
| GVDMM | Generalized Variable Degree Matched Mapping |
| AWGN | Additive White Gaussian Noise |
| LLR | Log-Likelihood Ratios |
| GA | Gaussian Approximation |
| BP | Belief Propagation |
| LMDG | Linear Minimum Distance Growth |
| VN | Variable Nodes |
| PCM | Parity-Check Matrices |
| PEG | Progressive Edge Growth |
| BER | Bit Error Rate |
| FER | Frame Error Rate |
References
- Liu, Y.; Wang, H.; Cai, L.; Shen, X.; Zhao, R. Fundamentals and advancements of topology discovery in underwater acoustic sensor networks: A review. IEEE Sens. J. 2021, 21, 21159–21174. [Google Scholar] [CrossRef]
- Zhang, R.; Ma, X.; Wang, D.; Yuan, F.; Cheng, E. Adaptive coding and bit-power loading algorithms for underwater acoustic transmissions. IEEE Trans. Wirel. Commun. 2021, 20, 5798–5811. [Google Scholar] [CrossRef]
- Hayes, S.; Grebogi, C.; Ott, E. Communicating with chaos. Phys. Rev. Lett. 1993, 70, 3031. [Google Scholar] [CrossRef] [PubMed]
- Dedieu, H.; Kennedy, M.P.; Hasler, M. Chaos shift keying: Modulation and demodulation of a chaotic carrier using self-synchronizing Chua’s circuits. IEEE Trans. Circuits Syst. II Analog. Digit. Signal Process. 1993, 40, 634–642. [Google Scholar] [CrossRef]
- Cai, X.; Xu, W.; Wang, L.; Chen, G. Towards high-data-rate noncoherent chaotic communication: A multiple-mode differential chaos shift keying system. IEEE Trans. Wirel. Commun. 2021, 20, 4888–4901. [Google Scholar] [CrossRef]
- Kolumbán, G.; Vizvári, B.; Schwarz, W.; Abel, A. Differential chaos shift keying: A robust coding for chaos communication. In Proceedings of the NDES, Seville, Spain, 27–28 June 1996; Volume 96, pp. 87–92. [Google Scholar]
- Kolumbán, G.; Kis, G.; Kennedy, M.; Jáko, Z. FM-DCSK: A new and robust solution to chaos communications. In Proceedings of the International Symposium on Nonlinear Theory and Its Applications, Honolulu, HI, USA, 29 November–3 December 1997; pp. 117–120. [Google Scholar]
- Ding, Q.; Wang, J. Design of frequency-modulated correlation delay shift keying chaotic communication system. IET Commun. 2011, 5, 901–905. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, P.; Feng, X.; Sun, H. Efficient imaging method for multireceiver SAS. IET Radar Sonar Navig. 2022, 16, 1470–1483. [Google Scholar] [CrossRef]
- Escribano, F.J.; Kaddoum, G.; Wagemakers, A.; Giard, P. Design of a new differential chaos-shift-keying system for continuous mobility. IEEE Trans. Commun. 2016, 64, 2066–2078. [Google Scholar] [CrossRef]
- Azou, S.; Burel, G.; Pistre, C. A chaotic direct-sequence spread-spectrum system for underwater communication. In Proceedings of the OCEANS’02 MTS/IEEE, Biloxi, MI, USA, 29–31 October 2002; Volume 4, pp. 2409–2415. [Google Scholar]
- Azou, S.; Burel, G.; Le Duff, L.; Pistre, C. Sea trial results of a chaotic direct-sequence spread spectrum underwater communication system. In Proceedings of the Oceans 2003. Celebrating the Past… Teaming Toward the Future (IEEE Cat. No. 03CH37492), San Diego, CA, USA, 22–26 September 2003; Volume 3, pp. 1539–1546. [Google Scholar]
- Shu, X.; Wang, J.; Wang, H.; Yang, X. Chaotic direct sequence spread spectrum for secure underwater acoustic communication. Appl. Acoust. 2016, 104, 57–66. [Google Scholar] [CrossRef]
- Chen, M.; Xu, W.; Wang, D.; Wang, L. Multi-carrier chaotic communication scheme for underwater acoustic communications. IET Commun. 2019, 13, 2097–2105. [Google Scholar] [CrossRef]
- Cai, X.; Hu, L.; Xu, W.; Wang, L. Design of an OFDM-based differential cyclic-shifted DCSK system for underwater acoustic communications. In Proceedings of the 2021 26th IEEE Asia-Pacific Conference on Communications (APCC), Kuala Lumpur, Malaysia, 11–13 October 2021; pp. 304–309. [Google Scholar]
- Cai, X.; Xu, W.; Wang, L.; Kaddoum, G. Joint energy and correlation detection assisted non-coherent OFDM-DCSK system for underwater acoustic communications. IEEE Trans. Commun. 2022, 70, 3742–3759. [Google Scholar] [CrossRef]
- Goalic, A.; Trubuil, J.; Beuzelin, N. Channel coding for underwater acoustic communication system. In Proceedings of the OCEANS 2006, Boston, MA, USA, 18–21 September 2006; pp. 1–4. [Google Scholar]
- Roy, S.; Duman, T.M.; McDonald, V.; Proakis, J.G. High-rate communication for underwater acoustic channels using multiple transmitters and space–time coding: Receiver structures and experimental results. IEEE J. Ocean. Eng. 2007, 32, 663–688. [Google Scholar] [CrossRef]
- Huang, J.; Zhou, S.; Willett, P. Nonbinary LDPC coding for multicarrier underwater acoustic communication. IEEE J. Sel. Areas Commun. 2008, 26, 1684–1696. [Google Scholar] [CrossRef]
- Wan, L.; Zhou, H.; Xu, X.; Huang, Y.; Zhou, S.; Shi, Z.; Cui, J.H. Adaptive modulation and coding for underwater acoustic OFDM. IEEE J. Ocean. Eng. 2014, 40, 327–336. [Google Scholar] [CrossRef]
- Nguyen, T.V.; Nosratinia, A.; Divsalar, D. The design of rate-compatible protograph LDPC codes. IEEE Trans. Commun. 2012, 60, 2841–2850. [Google Scholar] [CrossRef]
- Chen, Z.; Xu, X.; Chen, Y. Application of protograph-based LDPC codes in underwater acoustic channels. In Proceedings of the 2014 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Guilin, China, 5–8 August 2014; pp. 923–927. [Google Scholar]
- Chen, Z.; Xu, X.; Chen, Y. Finite-length EXIT analyses for protograph LDPC codes over underwater acoustic channels. In Proceedings of the 2017 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Xiamen, China, 22–25 October 2017; pp. 1–6. [Google Scholar]
- Inoue, Y.; Hisano, D.; Maruta, K.; Hara-Azumi, Y.; Nakayama, Y. Deep joint source-channel coding and modulation for underwater acoustic communication. In Proceedings of the 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 7–11 December 2021; pp. 1–7. [Google Scholar]
- He, Y.; Wang, L.; Zhou, C.; Chen, G. A novel trellis-coded differential chaotic modulation system. In Proceedings of the 2017 Wireless Telecommunications Symposium (WTS), Chicago, IL, USA, 26–28 April 2017; pp. 1–6. [Google Scholar]
- Zhou, C.; Hu, W.; Wang, L.; Chen, G. Turbo trellis-coded differential chaotic modulation. IEEE Trans. Circuits Syst. II Express Briefs 2017, 65, 191–195. [Google Scholar] [CrossRef]
- Zhang, B.; Wang, L.; Zhou, C.; Xu, W. Serial concatenated trellis-coded differential chaotic modulation. In Proceedings of the 2018 IEEE 29th Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Bologna, Italy, 9–12 September 2018; pp. 1–5. [Google Scholar]
- Zhan, J.; Wang, L.; Katz, M.; Chen, G. A differential chaotic bit-interleaved coded modulation system over multipath Rayleigh channels. IEEE Trans. Commun. 2017, 65, 5257–5265. [Google Scholar] [CrossRef]
- Chen, P.; Shi, L.; Fang, Y.; Cai, G.; Wang, L.; Chen, G. A coded DCSK modulation system over Rayleigh fading channels. IEEE Trans. Commun. 2018, 66, 3930–3942. [Google Scholar] [CrossRef]
- Lyu, Y.; Wang, L.; Cai, G.; Chen, G. Iterative receiver for M-ary DCSK systems. IEEE Trans. Commun. 2015, 63, 3929–3936. [Google Scholar] [CrossRef]
- Chen, Q.; Wang, L.; Lyu, Y.; Chen, G. Designing protograph-based LDPC codes for iterative receivers on M-ary DCSK systems. IEEE Trans. Circuits Syst. II Express Briefs 2017, 65, 466–470. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, P.; Huang, P.; Sun, H.; Ying, W. Wide-bandwidth signal-based multireceiver SAS imagery using extended chirp scaling algorithm. IET Radar Sonar Navig. 2022, 16, 531–541. [Google Scholar] [CrossRef]
- Miao, M.; Wang, L.; Chen, G. Performance and capacity analysis of MDCSK-BICM for impulsive noise of PLC. IEEE Trans. Power Deliv. 2021, 37, 3164–3175. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, L.; Chen, Q.; Xu, W. Optimization of constellation-based DC-BICM systems over power line channels. In Proceedings of the 2018 IEEE 29th Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Bologna, Italy, 9–12 September 2018; pp. 576–577. [Google Scholar]
- Xu, Z.; Wang, L.; Chen, G. Joint coding/decoding optimization for DC-BICM system: Collaborative design. IEEE Commun. Lett. 2021, 25, 2487–2491. [Google Scholar] [CrossRef]
- Chen, Q.; Wang, L. Design and analysis of joint source channel coding schemes over non-standard coding channels. IEEE Trans. Veh. Technol. 2020, 69, 5369–5380. [Google Scholar] [CrossRef]
- Song, D.; Wang, L.; Xu, Z.; Chen, G. Joint code rate compatible design of DP-LDPC code pairs for joint source channel coding over implant-to-external channel. IEEE Trans. Wirel. Commun. 2022, 21, 5526–5540. [Google Scholar] [CrossRef]
- Tang, C.; Shen, H.; Jiang, M.; Zhao, C. Optimization of generalized VDMM for protograph-based LDPC coded BICM. IEEE Commun. Lett. 2014, 18, 853–856. [Google Scholar] [CrossRef]
- Han, J.; Zhang, L.; Zhang, Q.; Leus, G. Low-complexity equalization of orthogonal signal-division multiplexing in doubly-selective channels. IEEE Trans. Signal Process. 2018, 67, 915–929. [Google Scholar] [CrossRef]
- Wang, S.; Wang, X. M-DCSK-based chaotic communications in MIMO multipath channels with no channel state information. IEEE Trans. Circuits Syst. II Express Briefs 2010, 57, 1001–1005. [Google Scholar] [CrossRef]
- Chen, P.; Shi, L.; Fang, Y.; Lau, F.C.; Cheng, J. Rate-diverse multiple access over Gaussian channels. IEEE Trans. Wirel. Commun. 2023; early access. [Google Scholar] [CrossRef]
- Dai, L.; Fang, Y.; Yang, Z.; Chen, P.; Li, Y. Protograph LDPC-coded BICM-ID with irregular CSK mapping in visible light communication systems. IEEE Trans. Veh. Technol. 2021, 70, 11033–11038. [Google Scholar] [CrossRef]
- Elkelesh, A.; Ebada, M.; Cammerer, S.; Schmalen, L.; Ten Brink, S. Decoder-in-the-loop: Genetic optimization-based LDPC code design. IEEE Access 2019, 7, 141161–141170. [Google Scholar] [CrossRef]
- Elkelesh, A.; Ebada, M.; Cammerer, S.; Ten Brink, S. Decoder-tailored polar code design using the genetic algorithm. IEEE Trans. Commun. 2019, 67, 4521–4534. [Google Scholar] [CrossRef]
- Das, S.; Suganthan, P.N. Differential evolution: A survey of the state-of-the-art. IEEE Trans. Evol. Comput. 2010, 15, 4–31. [Google Scholar] [CrossRef]
- Hu, X.Y.; Eleftheriou, E.; Arnold, D.M. Regular and irregular progressive edge-growth tanner graphs. IEEE Trans. Inf. Theory 2005, 51, 386–398. [Google Scholar] [CrossRef]
- Xu, Z.; Wang, L.; Hong, S. Joint early stopping criterions for protograph LDPC codes-based JSCC system in image transmission. Entropy 2021, 23, 1392. [Google Scholar] [CrossRef]
- Zhang, X.; Wu, H.; Sun, H.; Ying, W. Multireceiver SAS imagery based on monostatic conversion. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2021, 14, 10835–10853. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rate | Size | P | G | |||||
|---|---|---|---|---|---|---|---|---|
| 1/2 | 6 × 10 | 2 | 2 | 50 | 2000 | 0.7 | 0.2 |
| 17dB | 20.5466 | 18.5325 | 20.0685 | 20.3160 | 20.6202 | 26.8985 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Z.; Chen, Q.; Li, Y.; Cai, G.; Lin, L.; Zheng, J.; Sun, Y. Designing Protograph LDPC Codes for Differential Chaotic Bit-Interleaved Coded Modulation System for Underwater Acoustic Communications. J. Mar. Sci. Eng. 2023, 11, 914. https://doi.org/10.3390/jmse11050914
Xu Z, Chen Q, Li Y, Cai G, Lin L, Zheng J, Sun Y. Designing Protograph LDPC Codes for Differential Chaotic Bit-Interleaved Coded Modulation System for Underwater Acoustic Communications. Journal of Marine Science and Engineering. 2023; 11(5):914. https://doi.org/10.3390/jmse11050914
Chicago/Turabian StyleXu, Zhiping, Qiwang Chen, Yang Li, Guofa Cai, Lixiong Lin, Jiachun Zheng, and Yanglong Sun. 2023. "Designing Protograph LDPC Codes for Differential Chaotic Bit-Interleaved Coded Modulation System for Underwater Acoustic Communications" Journal of Marine Science and Engineering 11, no. 5: 914. https://doi.org/10.3390/jmse11050914