
Adaptive Beamforming with Hydrophone Arrays Based on Oblique Projection in the Presence of the Steering Vector Mismatch

Abstract
:1. Introduction
2. Problem Formulation
2.1. Signal Model
- t: arbitrary sampling time.
- : the received data sampled by the array.
- : the actual SV of the desired signal.
- : the SV of the dth interference.
- : the wavefront of the desired signal.
- : the wavefront of the dth interference.
- : the zero mean Gaussian white noise, representing additive noise in the environment received by the array.
- : the statistical expectation.
- : the covariance matrix of the desired signal.
- : the covariance matrix of interference-plus-noise.
- : the covariance matrix of the Gaussian white noise.
- : the power of the desired signal.
- : the power of the dth interference.
- : the power of noise.
- L: the sample size.
- : the conjugate-transpose operator.
- : the normalized interference-plus-noise covariance matrix of with respect to the power of noise.
- : the presumed SV of the desired signal.
2.2. Adaptive Beamforming
3. The Proposed Algorithm Based on OP
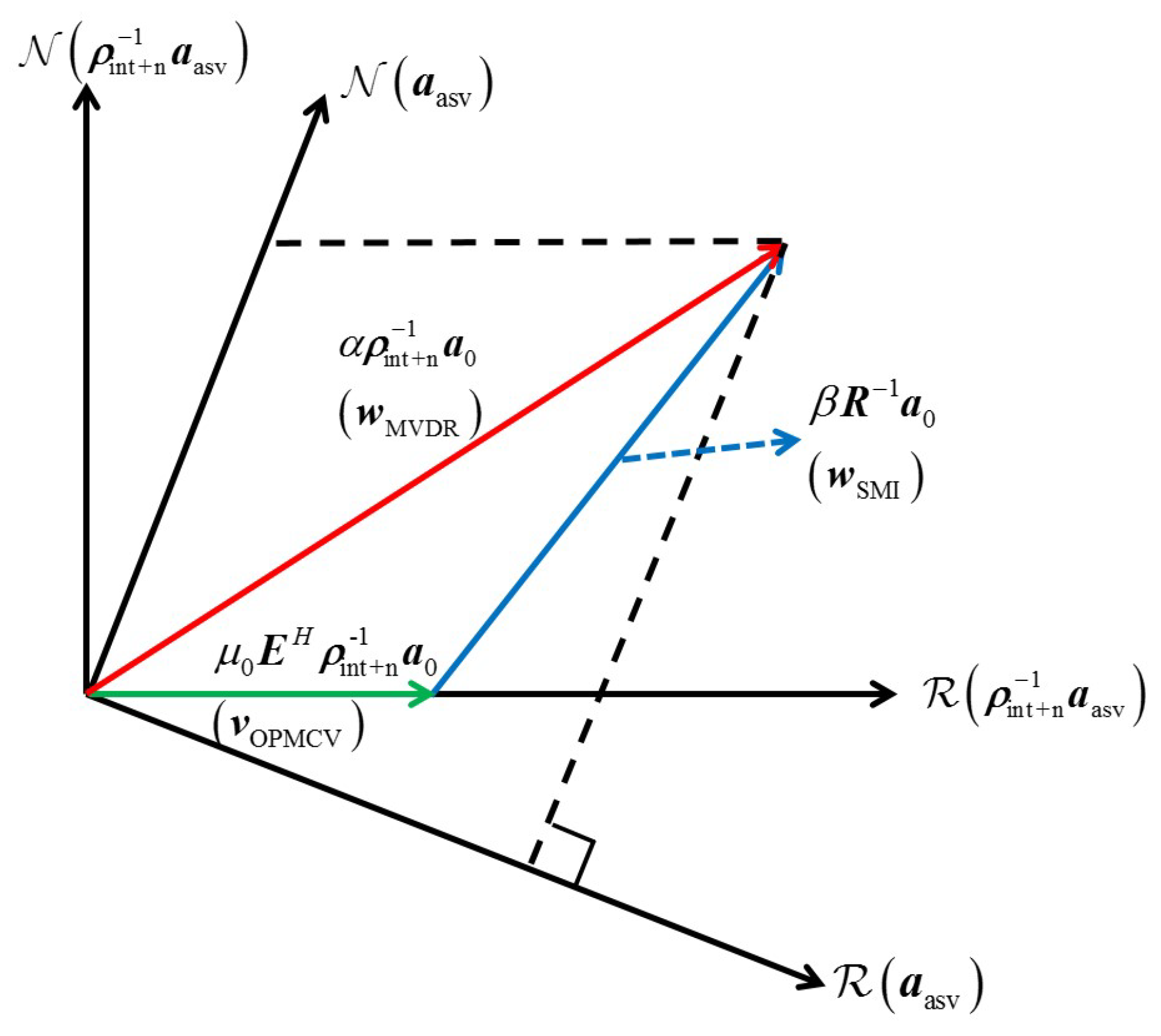
3.1. The OP-ABF Algorithm
- : an undetermined real number.
- : the principal component of .
- : an oblique projection matrix.
3.2. Solutions of E and μα
- : the eigenvalue matrix in which eigenvalues are in descending order.
- : the eigenvector matrix corresponding to the eigenvalues.
- : the eigenvectors that span the signal-plus-interference subspace associated with dominant eigenvalues.
- : the eigenvectors that span the noise subspace.
- : the linear coefficient vector of .
- : the linear coefficient vector of .
- : a random vector that lies in or .
- : the angle sector centering at the direction of with a range of .
- : the bearing of .
- : the nominal SV at that is uniformly sampled in .
- P: the number of samples in .
- : a linear coefficient vector in the set in (29).
- : the dimension of .
- : the orthogonal projection matrix of
- : the orthogonal projection matrix of .
- : the virtual covariance matrix of the interference-plus-noise in the complementary set of .
- : the complementary set of .
- Q: the number of samples in .
- : the nominal SV at that is uniformly sampled in .
- : the L dominant eigenvectors corresponding to the largest L eigenvalues.
4. SINRout Analysis of the OP-ABF
5. Simulation Results
5.1. The Results on ULA
- : the presumed SV in the l-th path.
- : the angle independently drawn in each trial from a Gaussian distribution of while changing from trial to trial.
- : a random phase that obeys the uniform distribution of in each simulation [38].
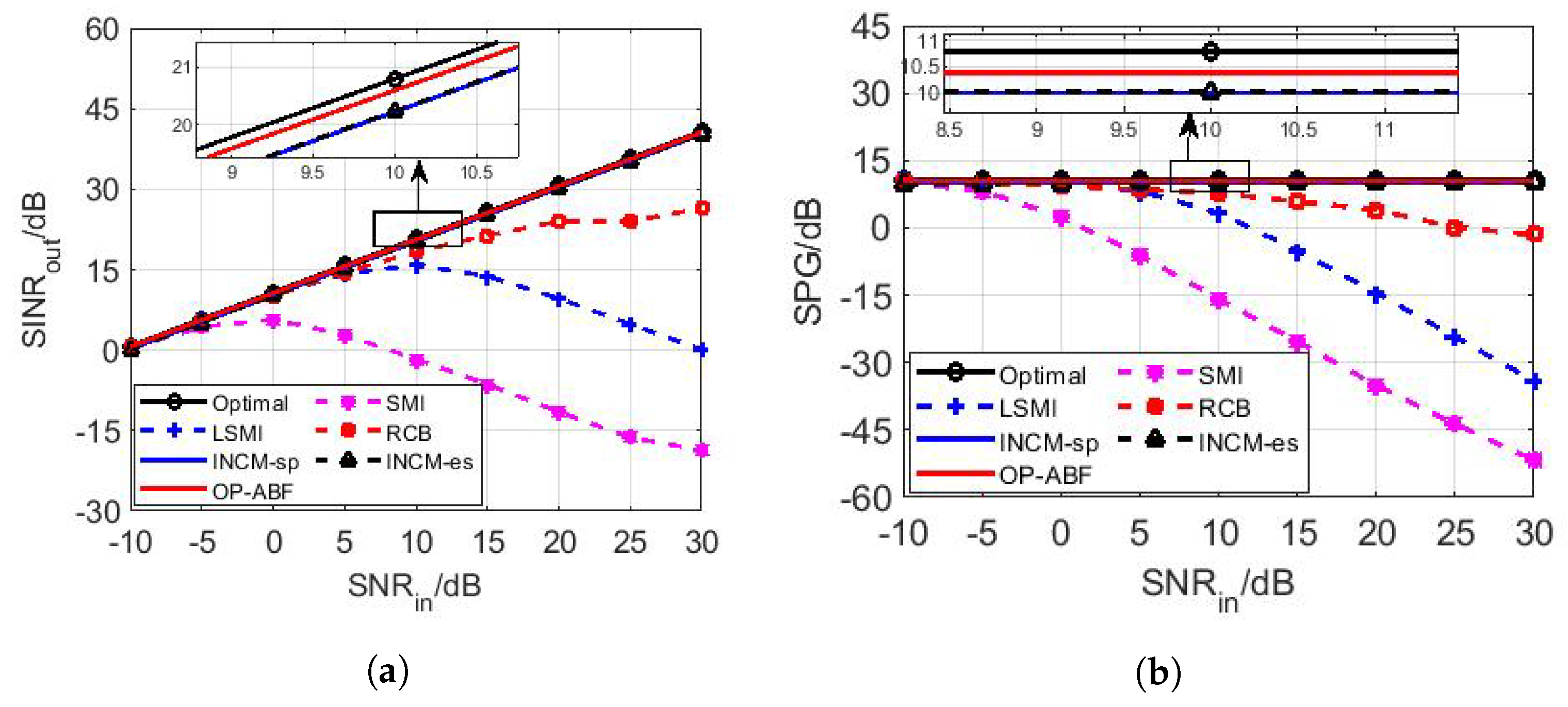
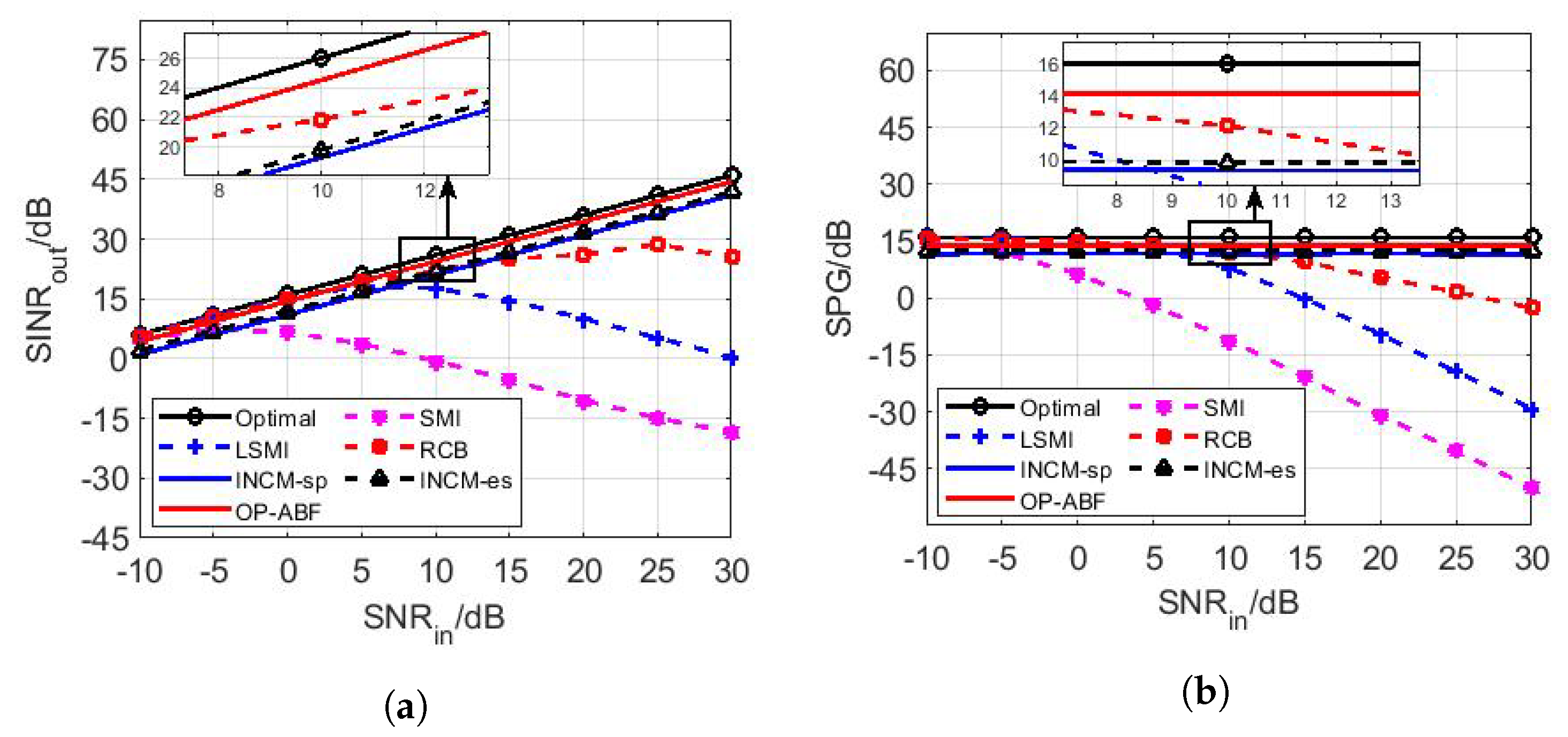
5.1.1. The SINRout and SPG versus the SNRin
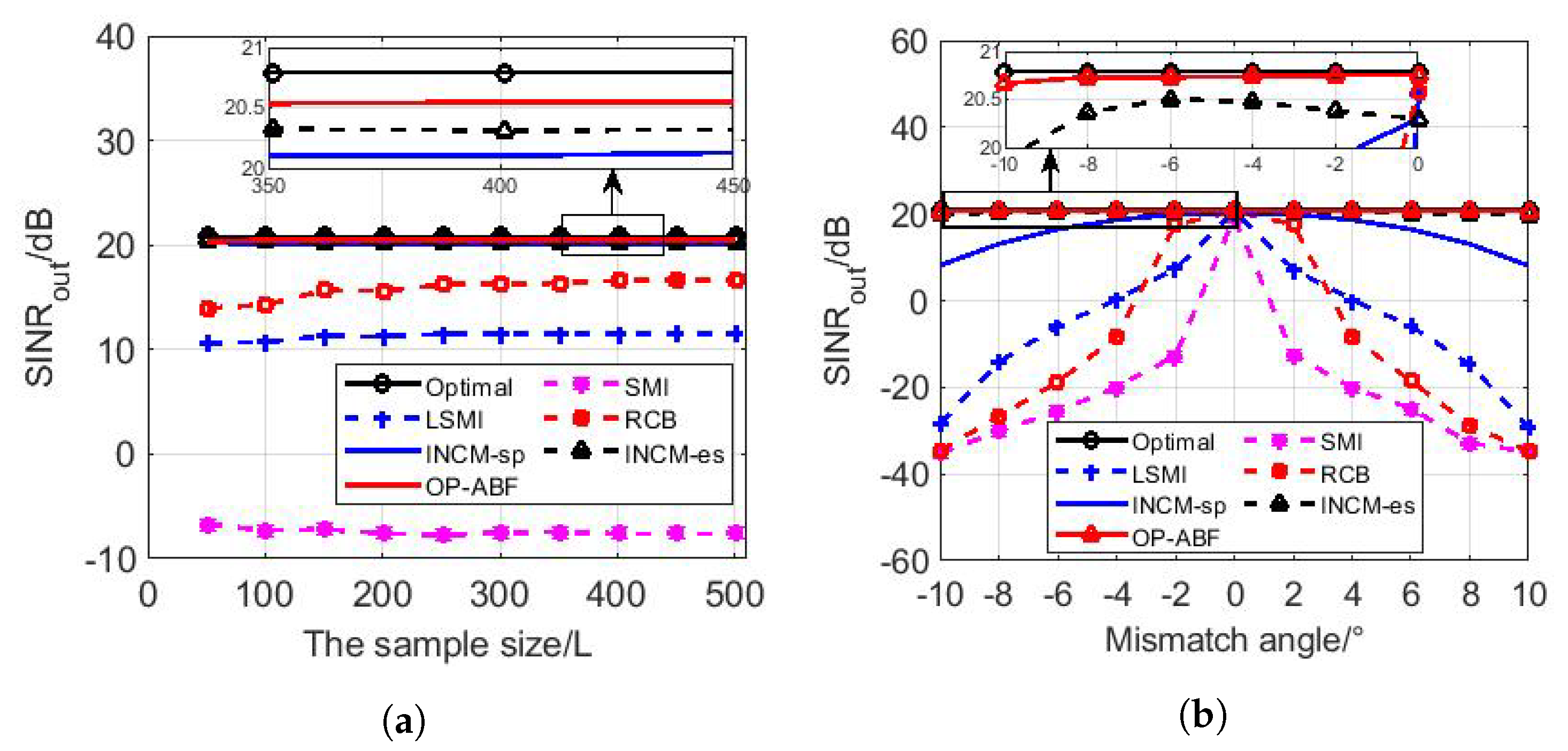
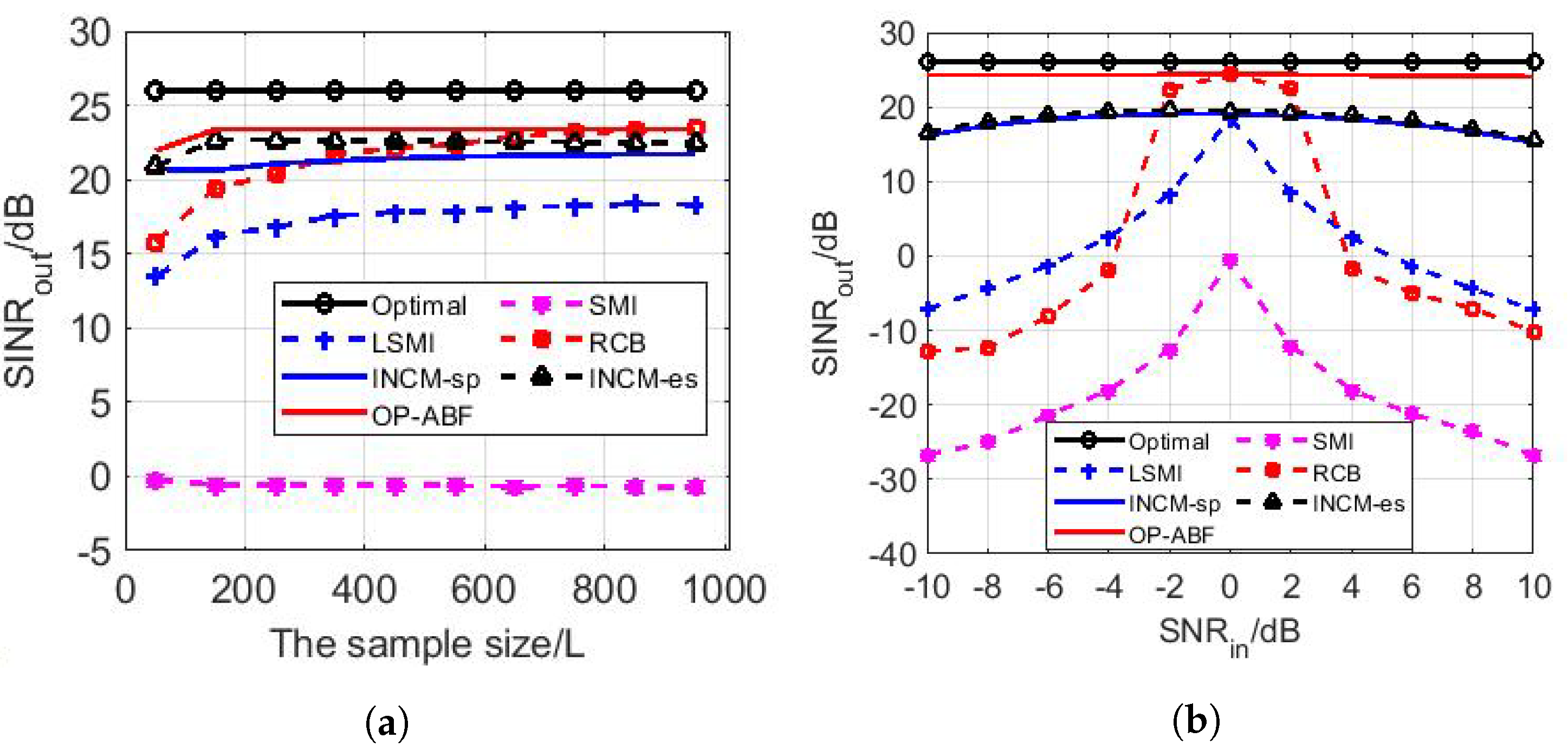
5.1.2. SINRout versus the Sample Size
5.1.3. SINRout versus Mismatch Angles
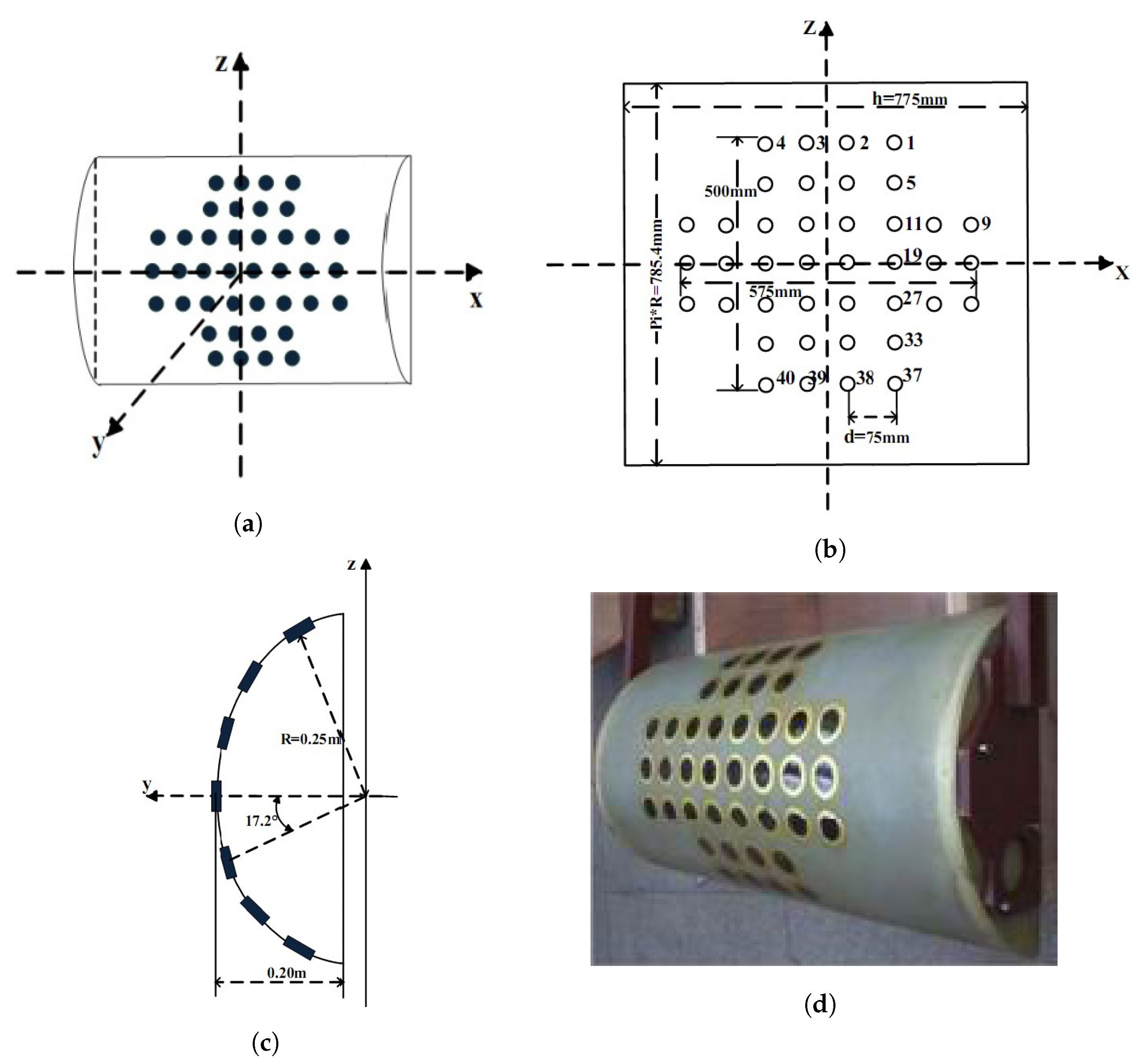
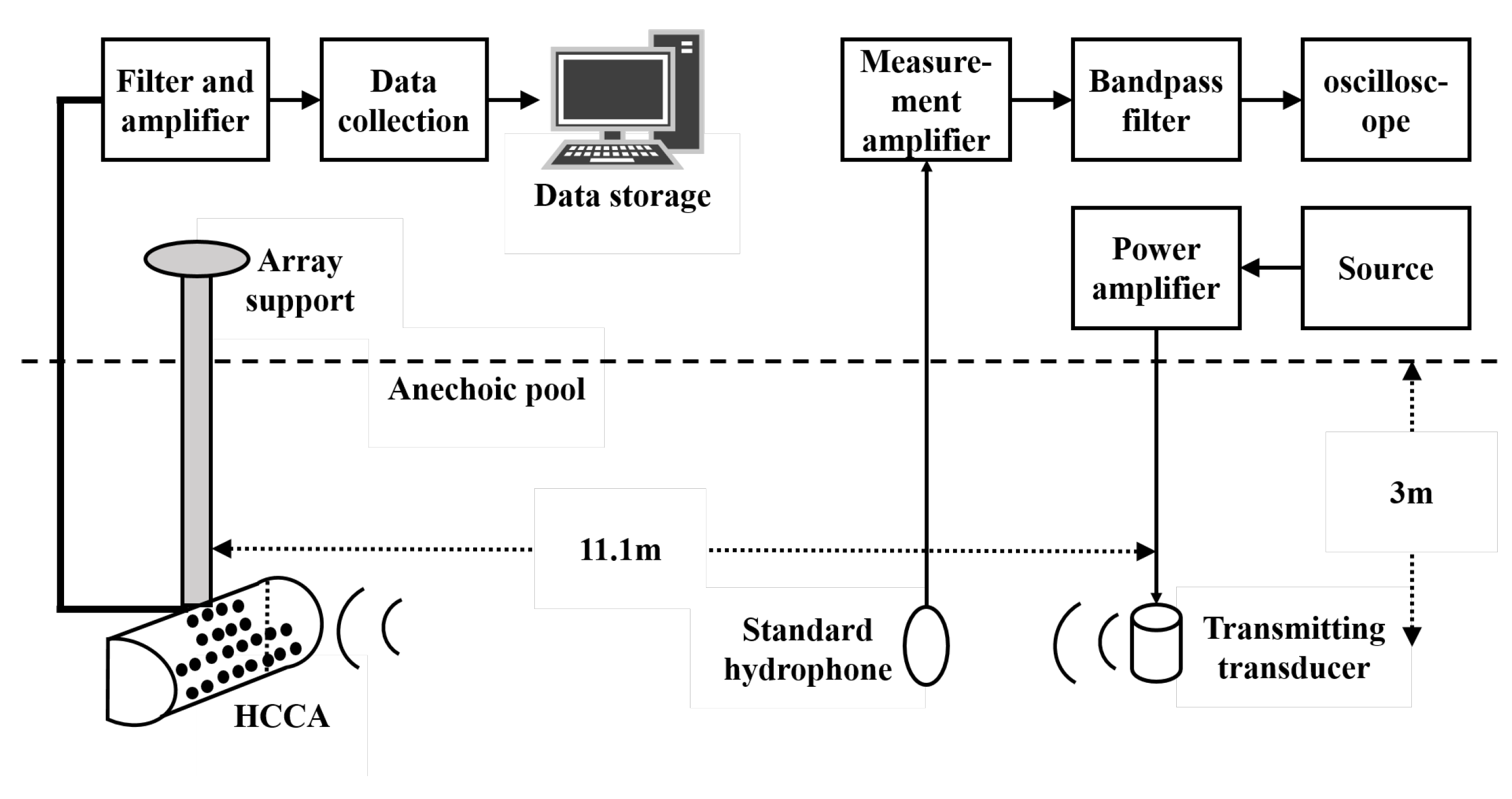
5.2. The Results on HCCA
5.2.1. The SINRout and SPG versus the SNRin
5.2.2. SINRout versus the Sample Size
5.2.3. SINRout versus Mismatch Angles
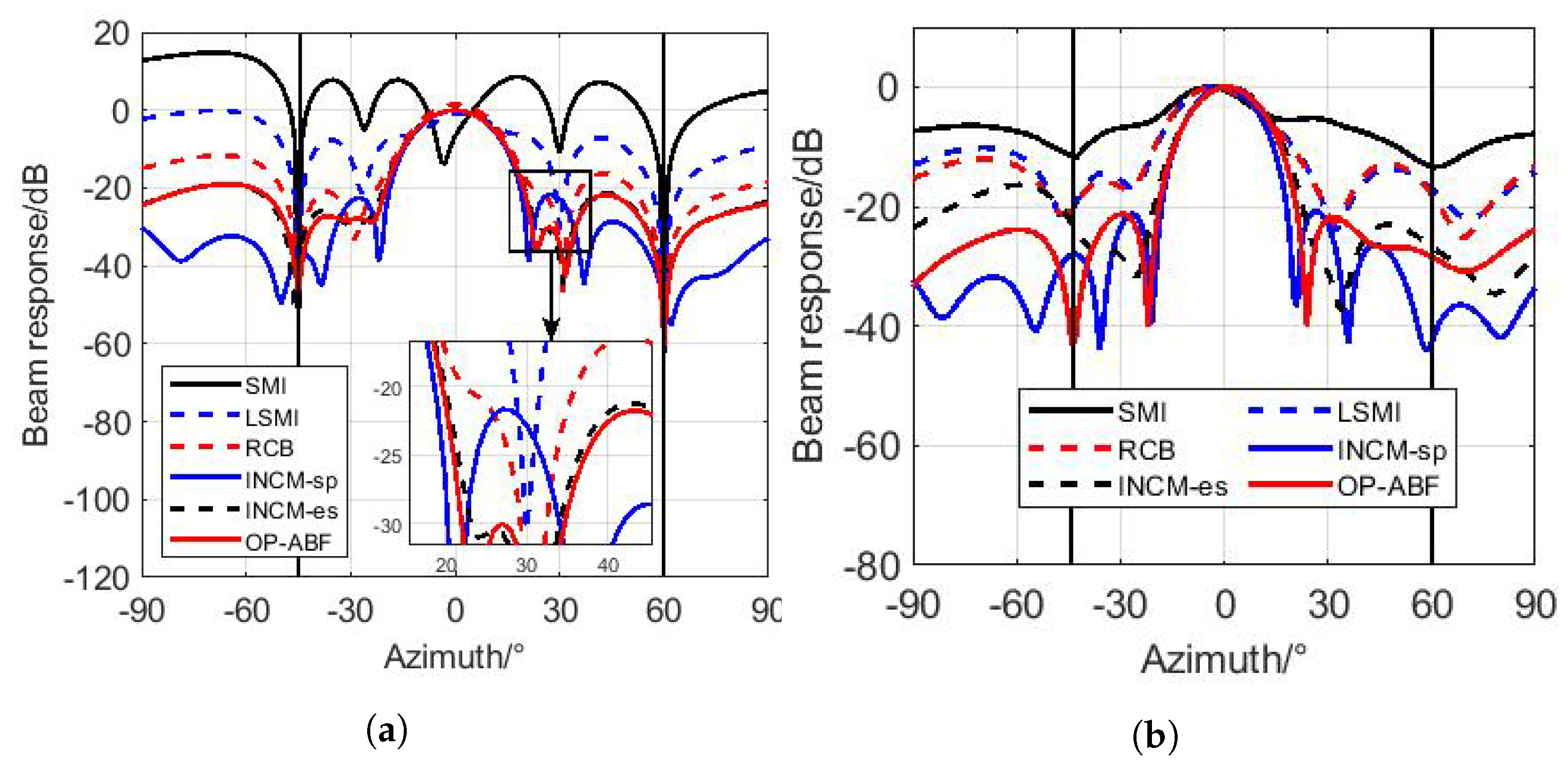
5.2.4. Beampatterns
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
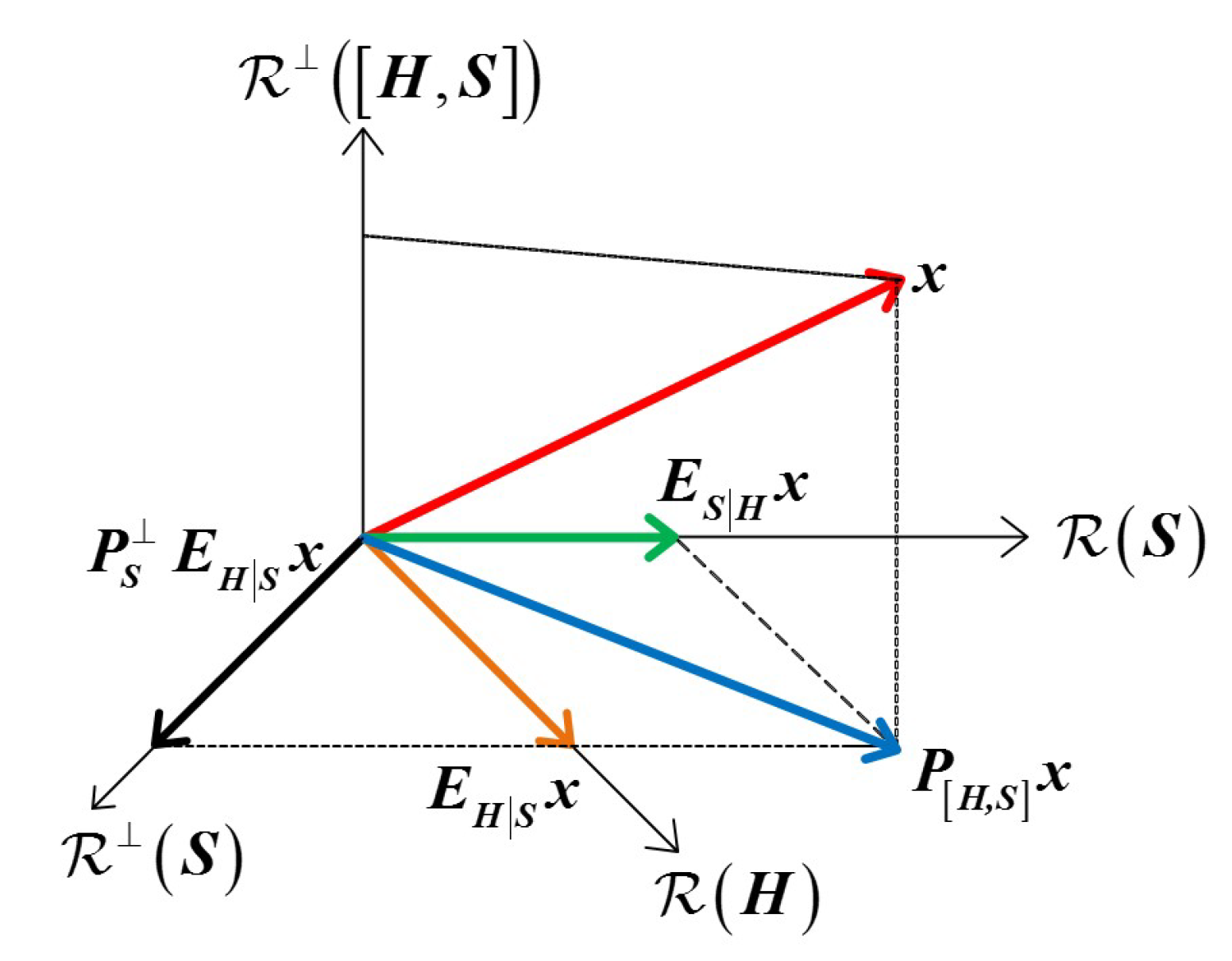
Appendix A. Oblique Projection

References
- Nielsen, R.O. Sonar Signal Processing; Artech House: Boston, MA, USA, 1991; ISBN 978-0890064535. [Google Scholar]
- Knight, W.C.; Pridham, R.G.; Kay, S.M. Digital Signal Processing for Sonar. Proc. IEEE 1981, 69, 1451–1506. [Google Scholar] [CrossRef]
- Vaccaro, R.J. The past, present, and the future of underwater acoustic signal processing. IEEE Signal Process. Mag. 1998, 15, 21–51. [Google Scholar] [CrossRef]
- Baggeroer, A.B. Sonar arrays and array processing. AIP Conf. Proc. 2005, 760, 3–24. [Google Scholar] [CrossRef]
- Li, Q.H. Digital Sonar Design in Underwater Acoustics: Principles and Applications; Zhejiang University Press: Hangzhou, China; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar] [CrossRef]
- Capon, J. High-resolution frequency-wavenumber spectrum analysis. Proc. IEEE 1969, 57, 1408–1418. [Google Scholar] [CrossRef]
- Huang, L.; Zhang, J.; Xu, X.; Ye, Z. Robust Adaptive Beamforming with a Novel Interference-Plus-Noise Covariance Matrix Reconstruction Method. IEEE Trans. Signal Process. 2015, 63, 1643–1650. [Google Scholar] [CrossRef]
- Gershman, A.B.; Turchin, V.I.; Zverev, V.A. Experimental results of localization of moving underwater signal by adaptive beamforming. IEEE Trans. Signal Process. 1995, 43, 2249–2257. [Google Scholar] [CrossRef]
- Yang, B.; Sun, C.; Chen, Y.L. Conformal Array Beampattern Optimization Method and Experimental Research Based on Sound Field Forecast. Torpedo Technol. 2006, 14, 18–20, 60. Available online: https://en.cnki.com.cn/Article_en/CJFDTotal-YLJS200601003.htm (accessed on 26 March 2023).
- Wax, M.; Anu, Y. Performance analysis of the minimum variance beamformer. IEEE Trans. Signal Process. 1996, 44, 928–937. [Google Scholar] [CrossRef]
- Cox, H. Resolving power and sensitivity to mismatch of optimum array processors. J. Acoust. Soc. Am. 1973, 54, 771–785. [Google Scholar] [CrossRef]
- Yan, S.F. Optimal Array Signal Processing: Beamforming Design Theory and Methods; Science Press: Beijing, China, 2018; ISBN 978-7-03-043964-2. [Google Scholar]
- Cox, H.; Zeskind, R.; Owen, M. Robust adaptive beamforming. IEEE Trans. Acoust. Speech Signal Process. 1987, 35, 1365–1376. [Google Scholar] [CrossRef]
- Jian, L.; Stoica, P.; Wang, Z.S. On robust capon beamforming and diagonal loading. IEEE Trans. Signal Process. 2003, 51, 1702–1715. [Google Scholar] [CrossRef]
- Vorobyov, S.A. Principles of minimum variance robust adaptive beamforming design. Signal Process. 2013, 93, 3264–3277. [Google Scholar] [CrossRef]
- Malioutov, D.; Cetin, M.; Willsky, A.S. A sparse signal reconstruction perspective for source localization with sensor arrays. IEEE Trans. Signal Process. 2005, 53, 3010–3022. [Google Scholar] [CrossRef]
- Gu, Y.; Goodman, N.A.; Hong, S.; Li, Y. Robust adaptive beamforming based on interference covariance matrix sparse reconstruction. Signal Process. 2014, 96, 375–381. [Google Scholar] [CrossRef]
- Wang, H.; Ma, Q.M. A robust adaptive beamforming algorithm based on covariance matrix reconstruction. Acta Acust. 2019, 44, 170–176. [Google Scholar] [CrossRef]
- Shen, F.; Chen, F.F.; Song, J.Y. Robust adaptive beamforming based on steering vector estimation and covariance matrix reconstruction. IEEE Commun. Lett. 2015, 19, 1636–1639. [Google Scholar] [CrossRef]
- Yuan, X.L.; Gan, L. Robust adaptive beamforming via a novel subspace method for interference covariance matrix reconstruction. Signal Process. 2017, 130, 233–242. [Google Scholar] [CrossRef]
- Yang, J.; Yang, Y.; Lei, B. An efficient robust adaptive beamforming method using steering vector estimation and interference covariance matrix reconstruction. In Proceedings of the 2018 OCEANS-MTS/IEEE Kobe Techno-Ocean (OTO), Kobe, Japan, 28–31 May 2018. [Google Scholar] [CrossRef]
- Chen, P.; Yang, Y.X.; Wang, Y.; Ma, Y.L.; Yang, L. Robust covariance matrix reconstruction algorithm for time-domain wideband adaptive beamforming. IEEE Trans. Veh. Technol. 2019, 68, 1405–1416. [Google Scholar] [CrossRef]
- Feldman, D.D.; Griffiths, L.J. A projection approach for robust adaptive beamforming. IEEE Trans. Signal Process. 1994, 42, 867–876. [Google Scholar] [CrossRef]
- Biguesh, M.; Valaee, S.; Champagne, B.; Bastani, M.H. A new beamforming algorithm based on signal subspace eigenvectors. In Proceedings of the Tenth IEEE Workshop on Statistical Signal and Array Processing (Cat. No.00TH8496), Pocono Manor, PA, USA, 16 August 2000. [Google Scholar] [CrossRef]
- Chang, A.C.; Chiang, C.T.; Chen, Y.H. A generalized eigenspace-based beamformer with robust capabilities. In Proceedings of the IEEE International Conference on Phased Array Systems and Technology, (Cat. No.00TH8510), Dana Point, CA, USA, 21–25 May 2000. [Google Scholar] [CrossRef]
- Yi, S.C.; Ying, W.; Wang, Y.L. Projection-based robust adaptive beamforming with quadratic constraint. Signal Process. 2016, 122, 65–74. [Google Scholar] [CrossRef]
- Zhang, X.D. Matrix Analysis and Applications, 2nd ed.; Tsinghua University Press: Beijing, China, 2013. [Google Scholar] [CrossRef]
- Behrens, R.T.; Scharf, L.L. Signal processing applications of oblique projection operators. IEEE Trans. Signal Process. 1994, 42, 1413–1424. [Google Scholar] [CrossRef]
- Yang, X.P.; Zhang, Z.A.; Zheng, T.; Long, T.; Sarkar, T.K. Mainlobe interference suppression based on eigen-projection processing and covariance matrix reconstruction. IEEE Antennas Wirel. Propag. Lett. 2014, 13, 1369–1372. [Google Scholar] [CrossRef]
- Guo, X.L.; Li, X.Y.; Qiu, W. A mainlobe jamming suppression method based on spatial spectrum estimation oblique projection filtering in beam space. Radar Sci. Technol. 2019, 17, 329–334. [Google Scholar] [CrossRef]
- Zhang, X.J.; He, Z.S.; Liao, B.; Zhang, X.P.; Yang, Y. Pattern synthesis via oblique projection based multi-point array response control. IEEE Trans. Antennas Propag. 2019, 67, 4602–4616. [Google Scholar] [CrossRef]
- Zhang, X.J.; He, Z.S.; Liao, B.; Yang, Y.; Zhang, J.F. Flexible array response control via oblique projection. IEEE Trans. Signal Process. 2019, 67, 3126–3139. [Google Scholar] [CrossRef]
- Wax, M.; Adler, A. Subspace-constrained array response estimation in the presence of model errors. IEEE Trans. Signal Process. 2021, 69, 417–427. [Google Scholar] [CrossRef]
- Zhang, X.; He, Z.; Xia, X.G.; Liao, B.; Zhang, X.; Yang, Y. OPARC: Optimal and precise array response control algorithm-part II: Multipoints and applications. IEEE Trans. Signal Process. 2019, 67, 668–683. [Google Scholar] [CrossRef]
- Van Trees, H.L. Optimum Array Processing: Part IV of Detection, Estimation, and Modulation Theory; John Wiley & Sons Ltd.: New York, NY, USA, 2002. [Google Scholar] [CrossRef]
- Grant, M.C.; Boyd, S.P. The CVX Users’ Guide, Release 2.2; CVX Research, Inc.: Austin, TX, USA, 2020; Available online: http://cvxr.com/cvx (accessed on 27 March 2023).
- Vorobyov, S.A.; Gershman, A.B.; Luo, Z.Q. Robust adaptive beamforming using worst-case performance optimization via Second-Order Cone programming. In Proceedings of the 2002 IEEE International Conference on Acoustics, Speech, and Signal Processing, Orlando, FL, USA, 13–17 May 2002. [Google Scholar] [CrossRef]
- Valaee, S.; Champagne, B.; Kabal, P. Parametric localization of distributed sources. IEEE Trans. Signal Process. 1995, 43, 2144–2153. [Google Scholar] [CrossRef]
- Reed, I.S.; Mallett, J.D.; Brennan, L.E. Rapid Convergence Rate in Adaptive Arrays. IEEE Trans. Aerosp. Electron. Syst. 1974, 10, 853–863. [Google Scholar] [CrossRef]
- Yu, Z.L.; Ser, W.; Er, M.H.; Gu, Z.; Li, Y. Robust Adaptive Beamformers Based on Worst-Case Optimization and Constraints on Magnitude Response. IEEE Trans. Signal Process. 2009, 57, 2615–2628. [Google Scholar] [CrossRef]
- COMSOL Multiphysics® v.5.2. Acoustics Module Users’ Guide; COMSOL AB: Stockholm, Sweden, 2021. Available online: https://cn.comsol.com/models/acoustics-module (accessed on 8 April 2023).
- Widrow, B.; Duvall, K.; Gooch, R.; Newman, W. Signal cancellation phenomena in adaptive antennas: Causes and cures. IEEE Trans. Antennas Propag. 1982, 30, 469–478. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
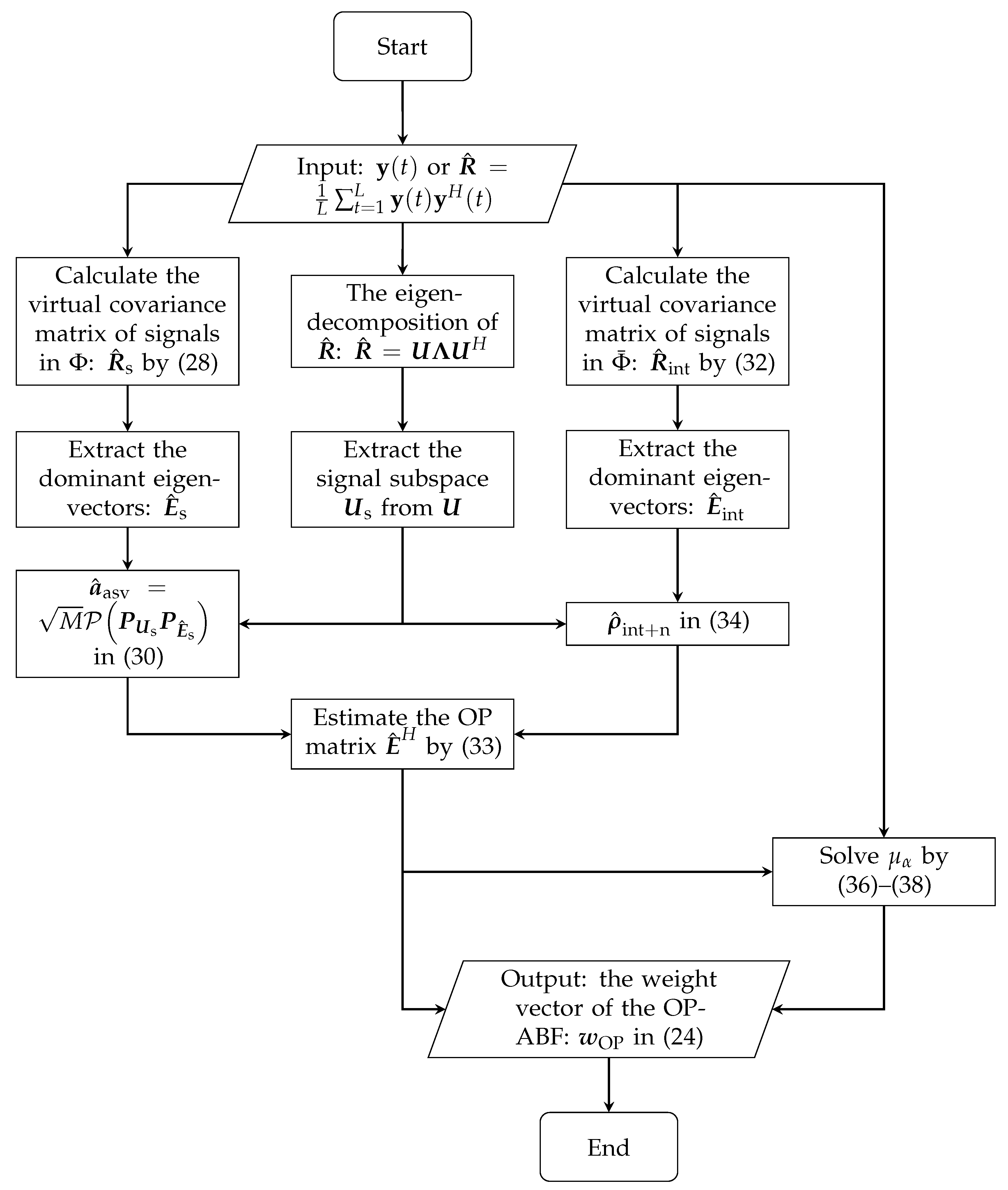
| step1: Obtain the eigen-subspaces corresponding to the dominant eigenvalues of in (3), in (28) and in (32) by eigen-decomposition, respectively. |
| step2: Substitute (30), (31), and (34) into (33). The OP matrix and the actual SV of the desired signal are estimated by and , respectively. |
| step3: Solve the optimization problem (36), and obtain the solution of in (38). |
| step4: Substitute , and into (24) and obtain . |
| The Length of the Bus Bar | The Radius | The Number of Hydrophones | The Spacing between Hydrophones | The Operating Frequency |
|---|---|---|---|---|
| h = 0.775 m | r = 0.25 m | 40 | d = 0.075 m | 6 kHz–10 kHz |
| Transmission | Reception | ||
|---|---|---|---|
| Instruments | Information | Instruments | Information |
| Source | RIGOL DG1000 function/arbitrary waveform generator | Conformal array | HCCA shown in Figure 5 and Table 2 |
| Power amplifier | L6 linear power amplifier | ||
| Transmitting Transducer | Overflow ring | Filter and amplifier | PF28000 Cut-off frequency: |
| Operating frequency: 8 kHz–10 kHz | 1 Hz–3.15 MHz | ||
| Oscilloscope | InfiniiVision 2000 X | Maximum gain multiplier: 8192 | |
| Bandpass filter | PF-1U Filter | Channels: 64 | |
| Cut-off frequency: 204.6 kHz | Data collection | Sampling frequency: 32 kHz–96 Hz | |
| Maximum gain multiplier: 8192 | |||
| Measurement amplifier | Conditioning Amplifier | ||
| Standard hydrophone | D/140/H | Data storage | Workstation |
| Operating frequency: 10 Hz–200 kHz | |||
| Receive sensitivity (re 1 V/μPa): −193 dB@1 kHz | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dai, Y.; Sun, C. Adaptive Beamforming with Hydrophone Arrays Based on Oblique Projection in the Presence of the Steering Vector Mismatch. J. Mar. Sci. Eng. 2023, 11, 876. https://doi.org/10.3390/jmse11040876
Dai Y, Sun C. Adaptive Beamforming with Hydrophone Arrays Based on Oblique Projection in the Presence of the Steering Vector Mismatch. Journal of Marine Science and Engineering. 2023; 11(4):876. https://doi.org/10.3390/jmse11040876
Chicago/Turabian StyleDai, Yan, and Chao Sun. 2023. "Adaptive Beamforming with Hydrophone Arrays Based on Oblique Projection in the Presence of the Steering Vector Mismatch" Journal of Marine Science and Engineering 11, no. 4: 876. https://doi.org/10.3390/jmse11040876