1. Introduction
Wave overtopping occurs when the wave run-up is higher than the crest freeboard. Wave overtopping transfers the wave energy to the crest and rear side of the coastal defense structure. It affects the stability of the structure’s crest and rip rap structure [
1]. Moreover, the wave overtopping flow poses a threat to the safety of pedestrians since the crest of the structures is often used as a recreation place. As reported in EurOtop [
2], in 2015, 11 people died due to wave overtopping or wave action on a coastal structure in UK. In addition, global warming leads to sea level rise, and stronger wave storms may exacerbate the wave overtopping hazard. The recent studies by Gao et al. [
3,
4] also show that long-period coastal waves have significant adverse effects on wave overtopping. It is not feasible to avoid wave overtopping due to the cost of an uneconomical high coastal defense structure. Therefore, it is essential to estimate wave overtopping flow behavior accurately.
Wave overtopping flows can be characterized by wave overtopping flow velocity (OFV) and wave overtopping layer thickness (OLT). These parameters are considered important when pedestrian safety on a coastal defense structure is a priority. There is extensive literature focused on OFV and OLT on sea dike crests, e.g., van Gent [
5], Schüttrumpf [
6], and van der Meer et al. [
7]. These studies have proposed empirical design formulas to predict OFV and OLT, which are collected in the EurOtop [
2] manual. Several studies also have investigated the tolerable limits for OFV and OLT to ensure pedestrian safety under overtopping flow on vertical wall structures. For example, Bae et al. [
8] and Cao et al. [
9]. studied the tolerable limits for these parameters on vertical wall structures. However, a few studies have focused on OFV and OLT on armored breakwater crests [
10,
11,
12].
A breakwater is typically constructed in areas where water waves are severe and at high risk of wave overtopping. Existing empirical formulas used for predicting OFV and OLT on sea dikes can serve as the basis for predictions on breakwater crests. In the empirical design equations, there are reduction factors and empirical coefficients that depend on hydraulic and geometrical conditions. These variables need to be calibrated with experimental data to improve estimation accuracy [
13,
14]. An example of this approach is presented in Mares-Nassare et al. [
10], where they adopted and calibrated existing empirical formulas on sea dikes proposed by Schüttrumpf and van Gent [
15] and EurOtop [
2]. They also introduced a new formula for estimating OLT on rubble mound breakwaters. OFV was estimated from the measured OLT at the middle of the crest. As suggested by Pepi et al. [
14], further research is still required for different hydraulic and structure geometries.
In this study, we investigated the OFV and OLT on a composite breakwater through physical experimentation. We adopted and calibrated the existing prediction formula for the sea dike and proposed new empirical coefficients and reduction factors to extend the application of the empirical equation for OFV and OLT estimation on the breakwater. Unlike common measurement techniques for OFV and OLT, such as micro propeller and wave gauge, this study used a digital imaging technique to measure the wave overtopping flow parameters and understand the flow behavior from spatial distribution as well as temporal change.
The paper is organized as follows.
Section 2 presents a literature review of previous studies on OFV and OLT. In
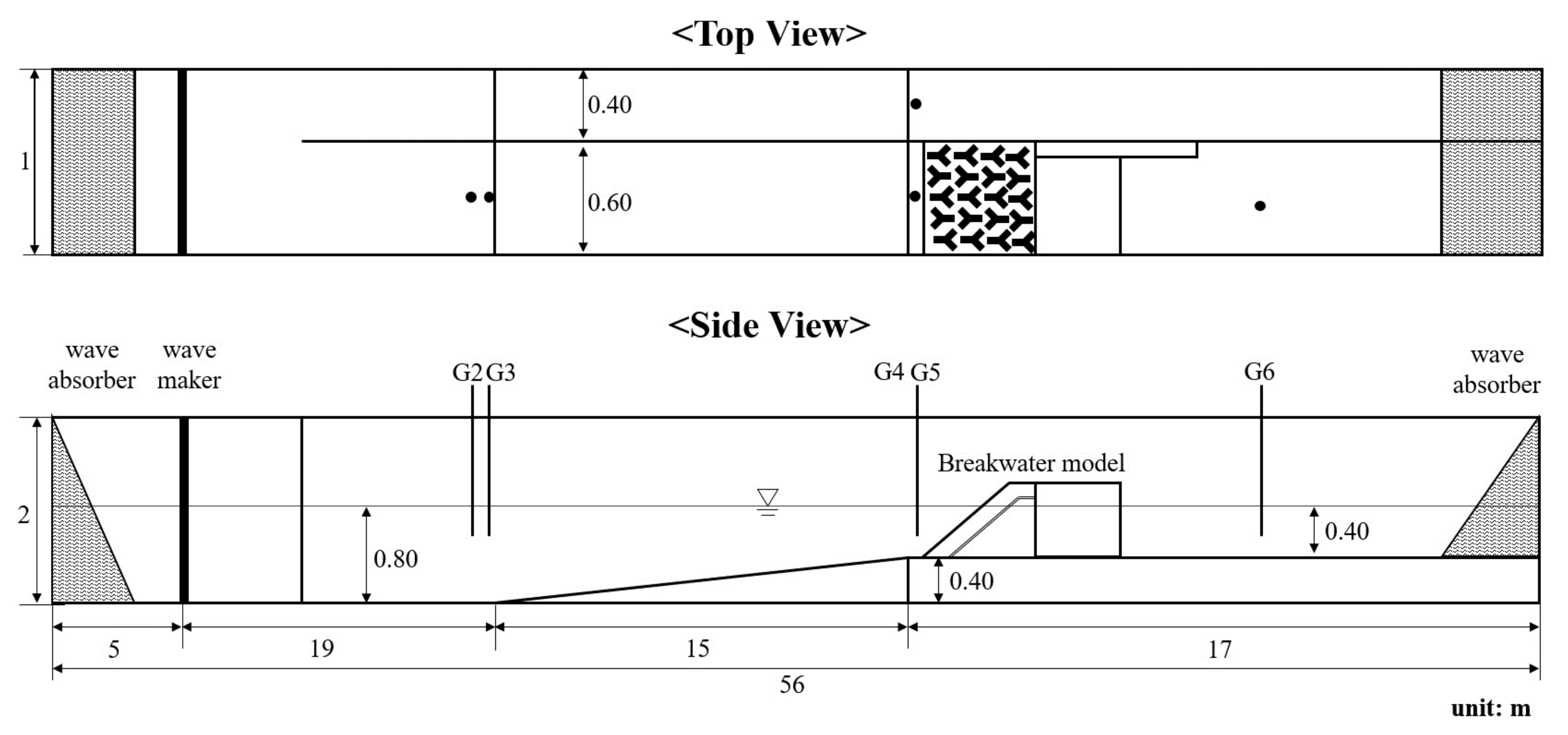
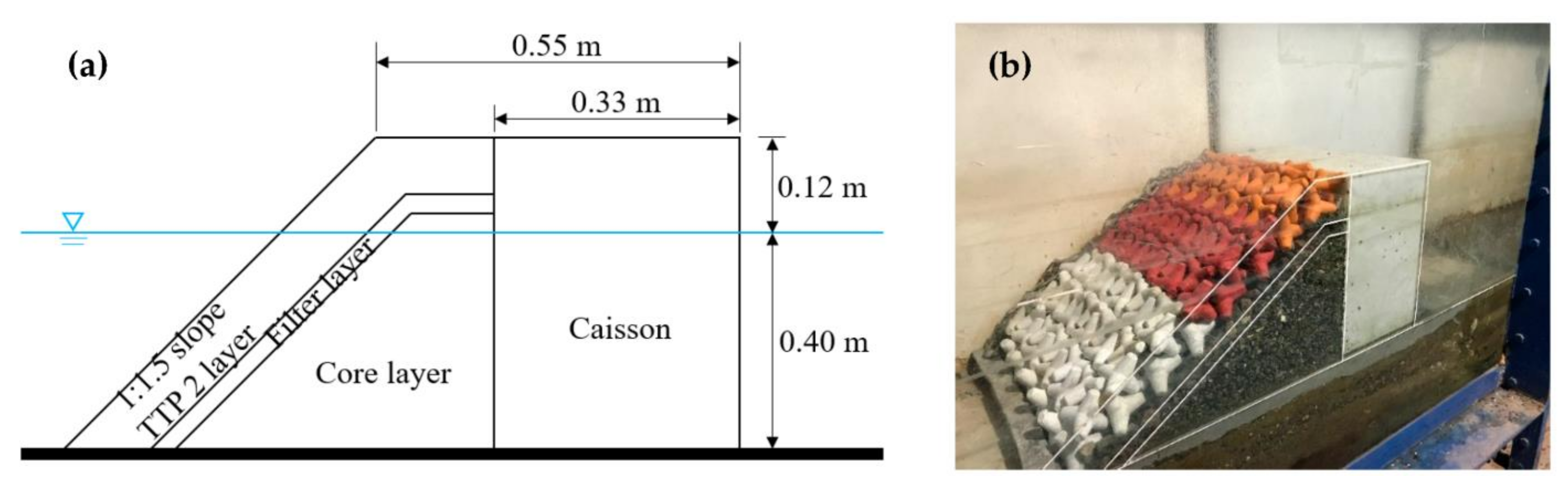
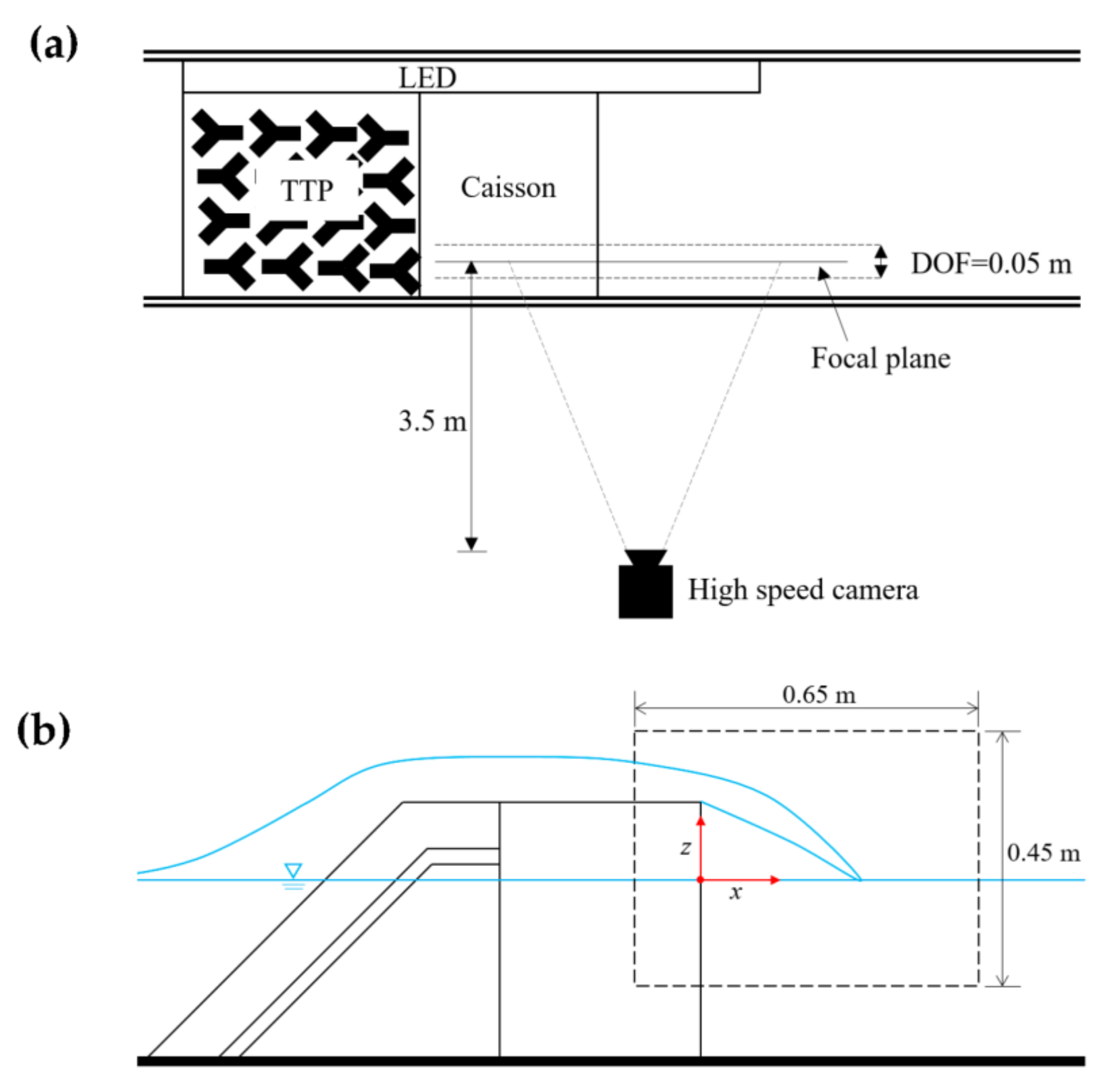
Section 3, we describe the physical experiment setup and the measurement technique.
Section 4 provides a comparison of the measured OFV and OLT with the estimation using the existing empirical equations as well as relationships of the parameters. Additionally, we provide flow patterns and the application of the new empirical coefficients and reduction factors in different wave conditions and structure geometries in this section. The interpretation of the results is discussed in
Section 5. Finally, we draw a conclusion in
Section 6.
2. Literature Review
Wave overtopping occurs when the wave run-up height,
, exceeds the structure crest freeboard,
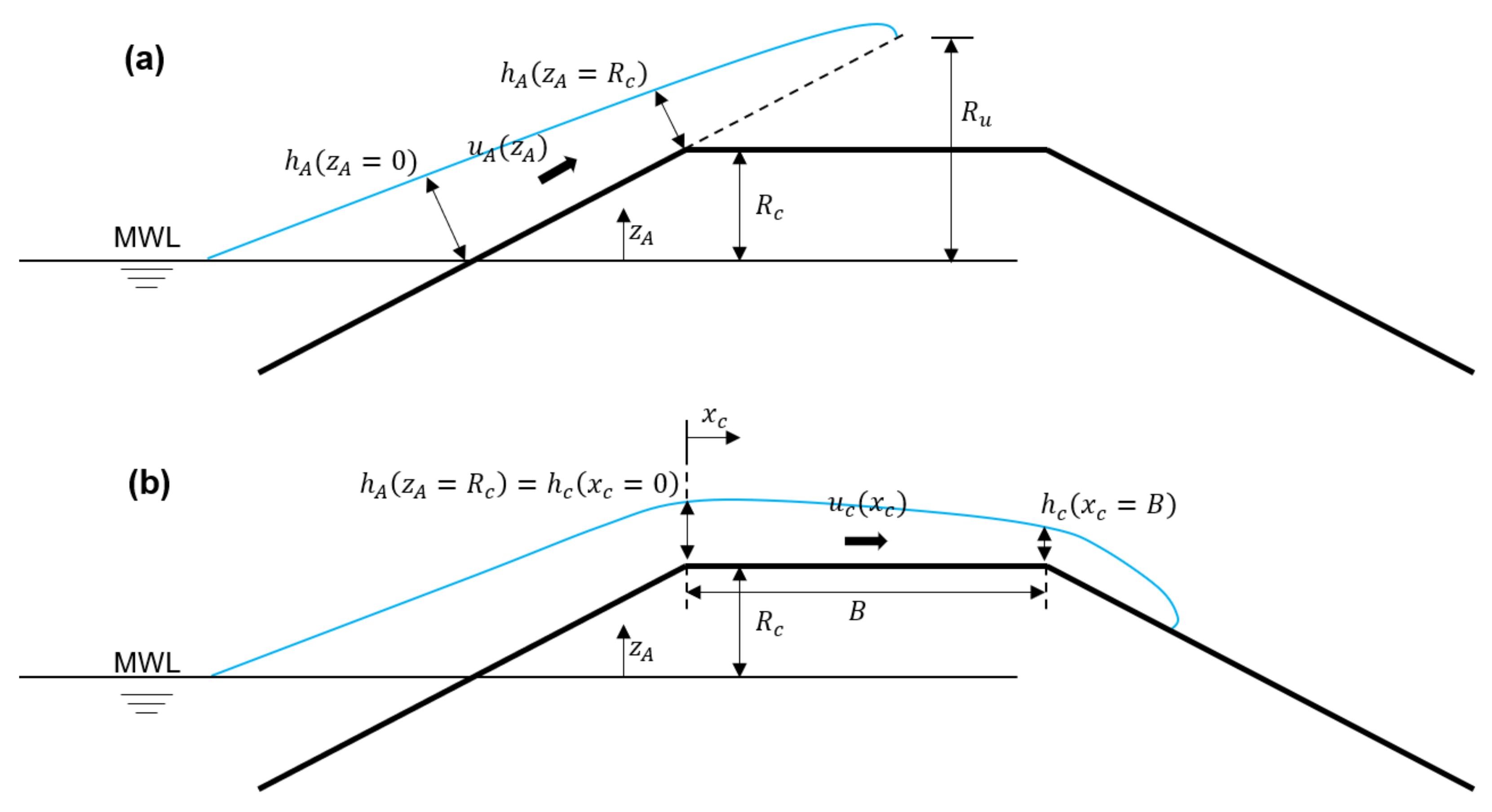
. The wave run-up height is a vertical difference between the highest point of wave run-up and the mean water level (MWL). Wave run-up height can be calculated for the situation where the crest freeboard is high enough to prevent wave overtopping. During wave overtopping, the crest freeboard height is less than the wave run-up height. In that condition, the seaward slope is virtually extended to allow considering a fictitious wave run-up level, as shown in
Figure 1a. This fictitious wave run-up on a sea dike structure was investigated by van Gent [
16] through a prototype measurement for physical model testing and numerical modeling, and Equation (1) was proposed to estimate the fictitious wave run-up height:
where
= 1.35,
= 4.7,
is given by Equation (2),
is given by Equation (3),
is the significant wave height of the incident wave height at the toe of the structure, and
is the surf similarity or Iribarren number given by Equation (4).
where
T is the spectral wave period and
is the seaward structure slope.
Van Gent [
5] and Schüttrumpf et al. [
6] performed an experiment focusing on the measurement of OFV and OLT on sea dikes. van Gent [
5] carried out a small-scale experiment using a sea dike with a single seaward slope
1/4, and Schüttrumpf et al. [
6] used a dike with three different seaward slopes,
1/3, 1/4, and 1/6. In addition, Schüttrumpf et al. [
6] also conducted a large-scale experiment to confirm the small-scale experiment result. In van Gent [
5], the wave run-up parameters were estimated based on a fictitious wave run-up height calculated using Equations (1)–(4), while, in Schüttrumpf et al. [
6], the wave run-up parameters were derived from measured wave run-up height. van Gent [
5] and Schuttrumpf et al. [
6] combined the findings in Schüttrumpf and van Gent [
15] and proposed Equations (5) and (6) to estimate the wave run-up parameters on the seaward slope of the sea dike.
where
is the wave run-up velocity;
is the wave run-up layer thickness;
is the elevation from the MWL; and
and
are the empirical coefficients given in
Table 1. The transition line between the seaward slope and crest is the initial condition for the wave overtopping flow on the crest. The overtopping flow parameters at this point can be estimated using Equations (5) and (6), with
(
Figure 1b). Schüttrumpf and van Gent [
15] also proposed a method to estimate the wave overtopping flow parameters, OFV (
) and OLT (
), along the dike crest using Equations (7) and (8):
where
is the distance from the intersection of the crest and seaward slope;
is the crest width;
is the friction coefficient; and
and
are the empirical coefficients given in
Table 1.
As seen in
Table 1, the empirical coefficient for wave run-up layer thickness,
, given by Schüttrumpf et al. [
6], is about 2 times larger (i.e., 2.2) than that by van Gent [
5]. They proposed a different empirical coefficient based on their own experimental results. This led to different results on the estimation of OLT, as shown in Mares-Nasarre et al. [
10]. According to Schüttrumpf and van Gent [
15], the discrepancy between these empirical coefficients was due to the different dike geometries and instruments they used. Bosman et al. [
17] investigated the discrepancy of these empirical coefficients through a physical experiment. Two different dike geometries,
1/4 and
1/6 were used, with one wave condition for both dikes. They found that the seaward slope of the structure influences these empirical coefficients. Later, Lorke et al. [
18] conducted a physical experiment that measured the OFV and OLT at the seaward crest edge and landward crest edge using wave gauges and micro propellers. The authors also proposed new empirical coefficients based on the seaward slope of the structure.
Van der Meer et al. [
7] conducted a physical test on a dike with a slope
1/3 and measured the OFV and OLT at the seaward crest edge and landward crest edge. In their study, they combined their experimental results with the observation from van Gent [
5] and Schüttrumpf et al. [
6]. Based on this newly combined data, van der Meer et al. [
7] proposed Equation (9) to estimate
at the seaward crest edge with a slightly different empirical coefficient,
, as shown in
Table 1. The
along the dike crest is then estimated as the decay function given by Equation (10):
where
is the wavelength based on the spectral wave period. The empirical coefficient in Equation (9) is
, meaning that the slope angles of the structure is taken into account in the prediction. van der Meer et al. [
7] also proposed Equation (11) to estimate
along the sea dike crest:
Based on their analysis, OLT decreases directly behind the seaward crest edge and then remains almost constant along the crest. The wave run-up layer thickness at the seaward edge, , is 50% larger than gave in Equation (11).
Based on the aforementioned studies, it can be concluded that the wave overtopping flow parameters along the crest can be estimated based on the wave run-up parameters at the seaward crest together with the empirical coefficient. However, since the seaward slope of the sea dike is impermeable and smooth, the estimation of a fictitious wave run-up height formula using Equations (1)–(4) is not applicable for rough slopes such as breakwater structures. EurOtop [
2] provided an empirical formula to estimate the fictitious wave run-up on the armored front slope of a structure such as a breakwater using Equation (12):
with the maximum value of
where
is the influence of roughness of the slope;
is the influence of oblique wave attack;
is the influence of berm;
is a coefficient of
when
1.8:
In the case of an impermeable and smooth seaward slope structure, where the wave attack is perpendicular to the structure without a berm, the roughness factor,
, the influence of oblique wave attack,
, and the influence of the berm,
, are equal to 1. The
value for different types of armor units can be found in [
2]. For 2 layered tetrapods on a rubble mound breakwater with a permeable core, they derived
0.42.
EurOtop [
2] adopted Equations (5) and (6) to estimate the wave run-up parameters, wave run-up velocity,
, and wave run-up layer thickness,
. As shown in
Table 1, EurOtop [
2] specifies the empirical coefficient
1.4 for the slope 1/3 and 1/4 and
= 1.5 for the slope of 1/6. In the case of the seaward structure slope between these values, EurOtop [
2] suggested applying interpolation to obtain the empirical coefficient. Similarly, EurOtop [
2] also provided the empirical coefficient
0.20 for the of slope 1/3 and 1/4 and
0.30 for the slope of 1/6 and suggested an interpolation method to obtain an empirical coefficient between these slopes. The OFV along the crest was then estimated using Equation (10). According to EurOtop [
2], the OLT along the crest was 2/3 of that at the seaward crest edge (
(
>>0)) =
(
)).
Recently Mares-Nasarre et al. [
10] conducted an experiment on a mound breakwater with the seaward slope
2/3, focusing on OFV and OLT at the middle of the crest. Mares-Nasarre et al. [
10] used Equation (12) proposed by EurOtop [
2] to estimate the fictitious wave run-up height on three different armor units: 1-layer cubipod, 2-layers rock, and 2-layers cube. The wave run-up layer thickness at the seaward crest edge (
)) and at the middle of the crest (
=
B/2)) was estimated using Equations (6) and (8). They calibrated the roughness factor,
, and empirical coefficient,
, with their experiment data following procedures given in Molines and Medina [
13] and proposed a new empirical coefficient, as shown in
Table 1.
According to Molines and Medina [
13] the roughness factor,
, is a fitting parameter and needs to be calibrated based on the database. Pepi et al. [
14] proposed a new formula to calculate the roughness factor for 2-layers rock mound breakwater with the seaward slope
1/2. Calibration of
, as well as the empirical coefficient, reduced the difference between measured and estimated wave overtopping parameters [
10,
13,
14]. This indicates that using the available empirical equation with a calibrated empirical coefficient and roughness factor has a potential application in the estimation of wave overtopping flow parameters on different coastal defense structures. Hence, in this paper, we extend the application of the empirical equation. We adopted Equation (12) to estimate the fictitious wave run-up height on the breakwater with 2-layers tetrapods and a permeable core. Then the wave run-up parameters were estimated using Equations (5) and (6). Finally, the OFV was estimated using Equation (10), and the OLT was estimated as
(
>>0)) =
(
[
2]. The roughness factor and empirical coefficient were calibrated following the method presented by Molines and Medina [
13] and Mares-Nasarre et al. [
10].
5. Discussion
OFV and OLT on the composite breakwater can be predicted with the existing equations in the literature. The fictitious wave run-up height,
, needs to be estimated firstly by wave conditions at the structure toe. EurOtop [
2] provides an empirical equation to estimate
on a permeable slope structure using Equation (12) where the roughness factor,
, in this equation needs to be calibrated with experimental data to obtain the optimum estimation. With the estimated
, the wave run-up flow velocity and wave run-up layer thickness at the seaward crest edge of the breakwater can then be estimated using Equations (5) and (6) given by Schüttrumpf and van Gent [
15]. The empirical coefficients,
and
, in these two equations also need to be calibrated with experiment data. The roughness factor,
, obtained in this study using a two-level bootstrap resampling is not significantly different from that provided by EurOtop [
2]. The optimum estimation in this study is determined using the 50% percentile of the roughness factor as
0.35. This value is slightly smaller than the roughness factor value by EurOtop [
2],
0.38, for two-layered tetrapod armors. The similarity of the roughness factor values is likely due to both experiments with the same front slope (
1/1.5). The empirical coefficient,
, for the OFV in this study has a smaller value compared to
1.30 from van Gent [
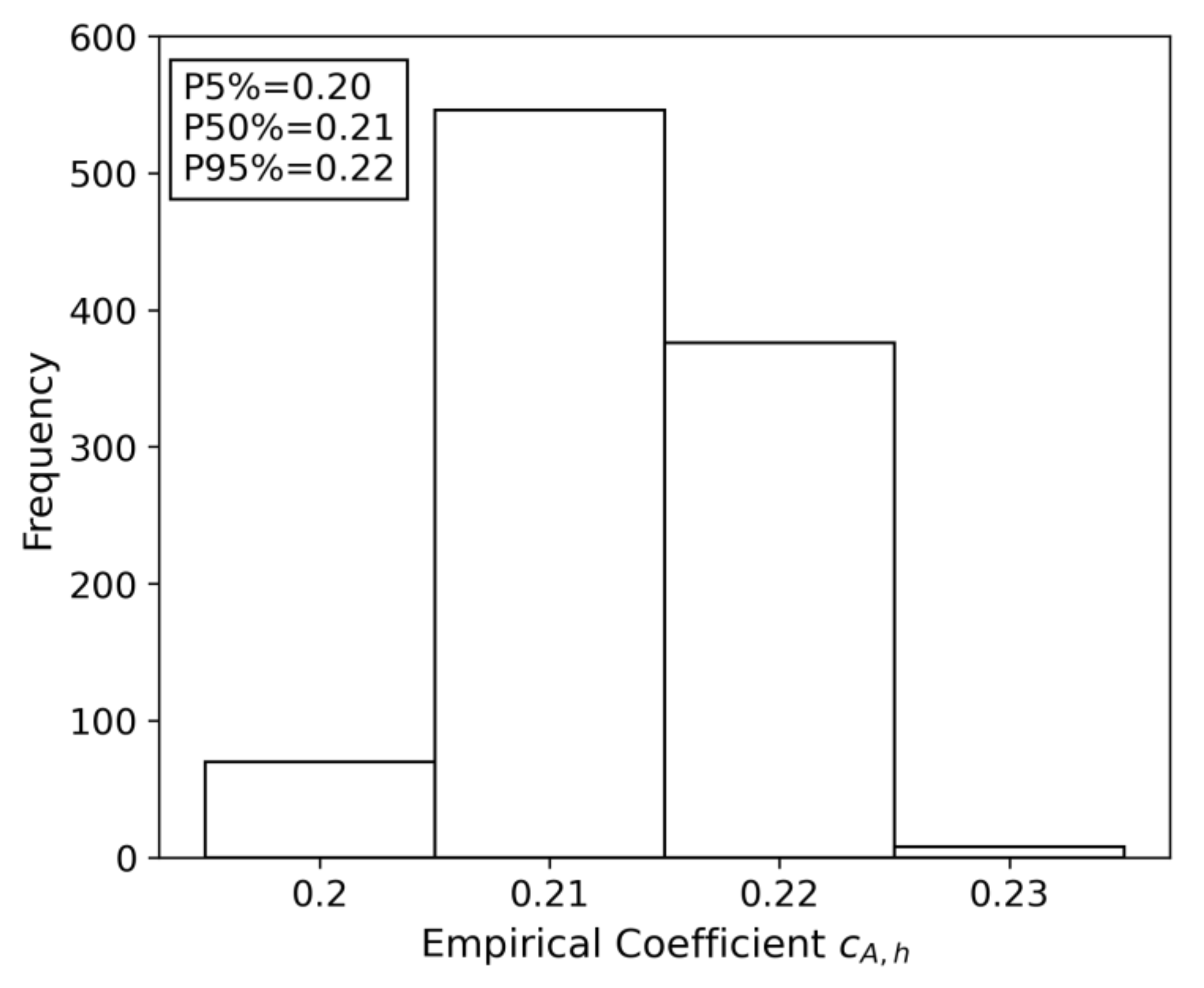
5] conducting the reliable experiments. In the OLT, the optimum empirical coefficient,
, is determined using the 50% percentile as
0.21. The
value is close to
0.20 by EurOtop [
2]. The difference in the empirical coefficient for the OFV (
) is likely explained by the different structure geometry of the experiments, as discussed in Schüttrumpf and van Gent [
15]. As shown in this study, using the empirical coefficients,
and
, and roughness factor,
, calibrated with the experiments can improve the estimation of OFV and OLT on composite breakwaters.
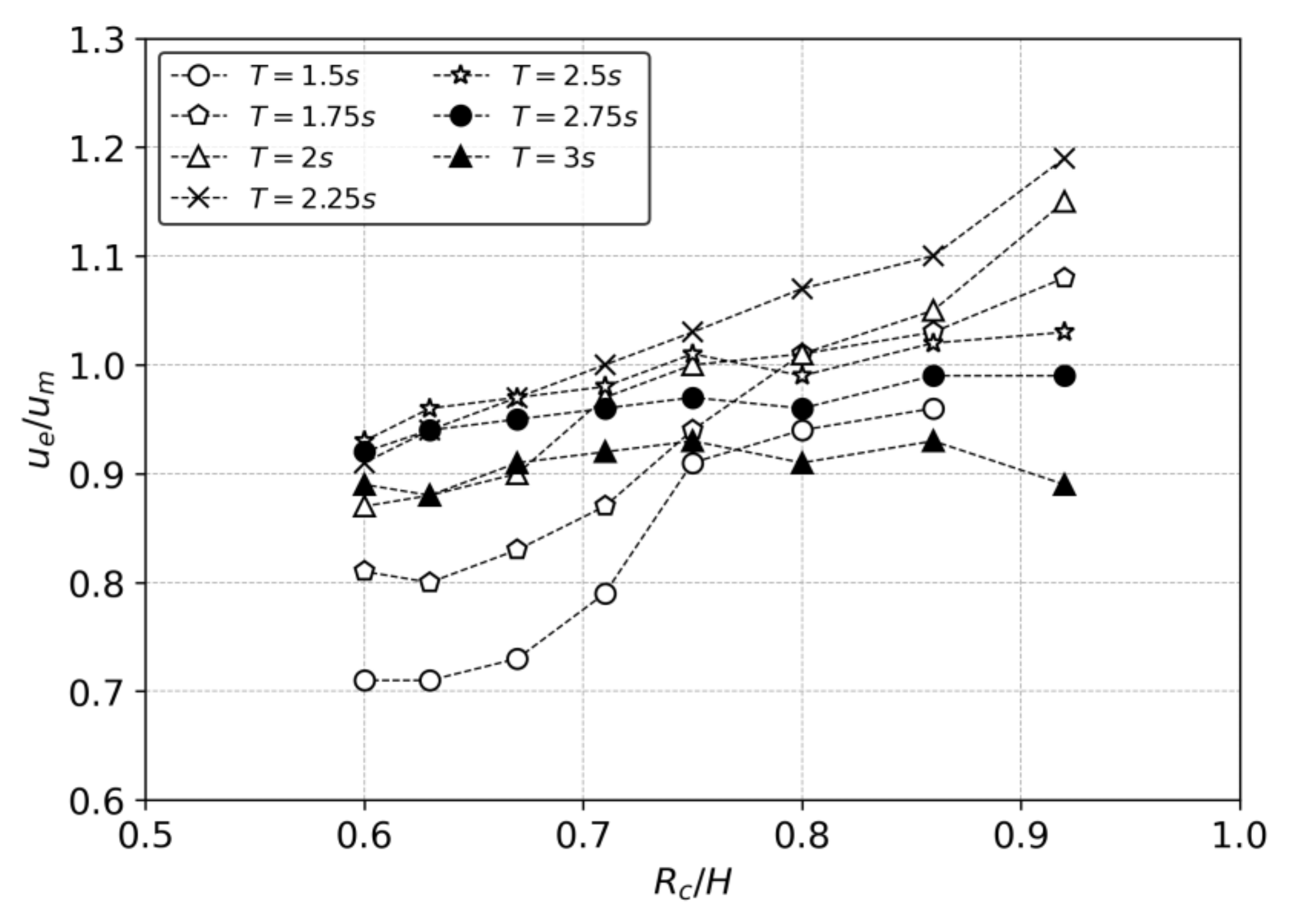
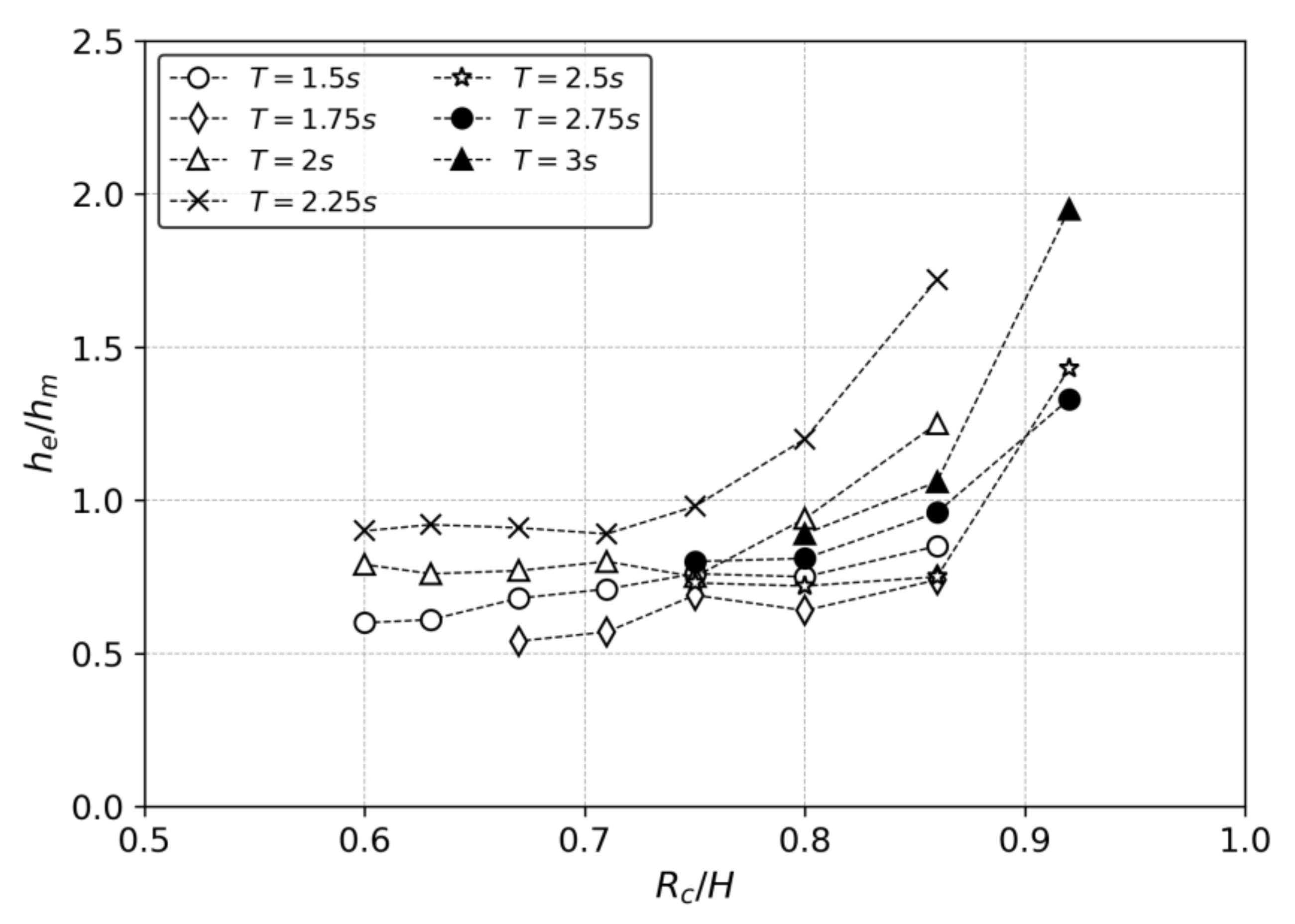
On the other hand, the estimated OFV,
, fluctuates in the wave period of
1.5–2.25 s, where the
is underestimated in the relatively large wave height and overestimated in the relatively small wave height. In the longer wave period of
2.5–3.0 s,
remains relatively constant. The patterns are likely explained by the different water wave conditions as presented in
Table 2. Based on the linear wave theory, the shorter wave period used in this study is mostly of the intermediate water depth condition at the structure location (0.064
0.114) and the longer wave period is close to the shallow water depth condition (0.028
0.041). The overtopping flows of the short wave period are relatively sensitive to the interaction between the structure front and water waves, and are also subject to wave breaking as the wave height increases. The Iribarren’s number for the short wave period is in the range of 2.79–3.47, indicating the collapsing breaking type, which leads to wave breaking, causing nonlinearity and complicated interaction. In the OLT, a relatively uniform estimation is observed for the relatively large wave heights, but it mostly underestimates the OLT. As the wave height decreases, the estimated OLT (
) increases like the cases of OFV. Flows during the small wave heights are affected by most factors over the structure model and environmental conditions because the flows have relatively little momentum. The application of newly determined empirical coefficients shows the possibility of existing equations with optimized coefficients for various types of coastal structures. However, the discrepancy observed in relatively short and long waves means that a better empirical equation is needed to predict overtopping flows more accurately.
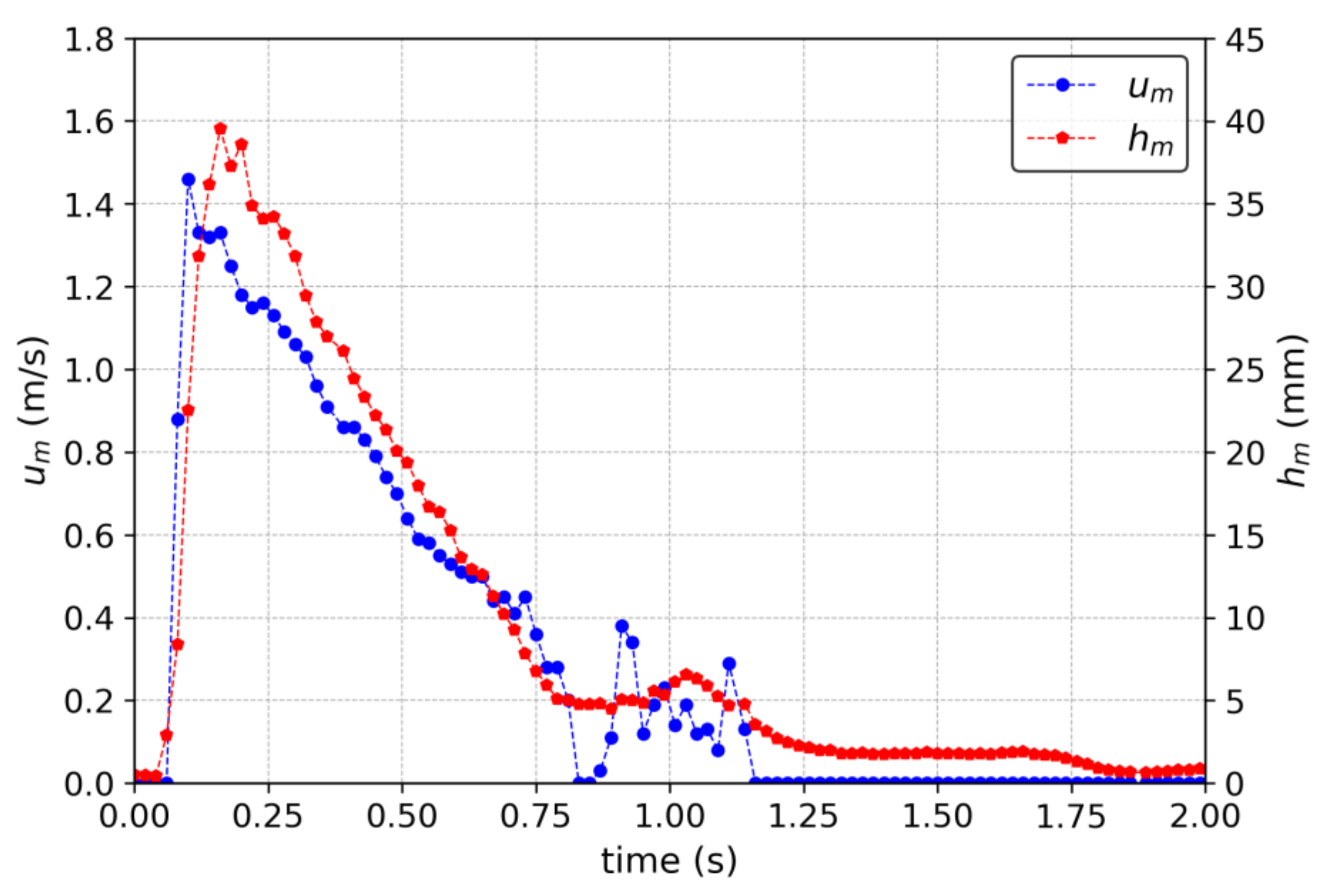
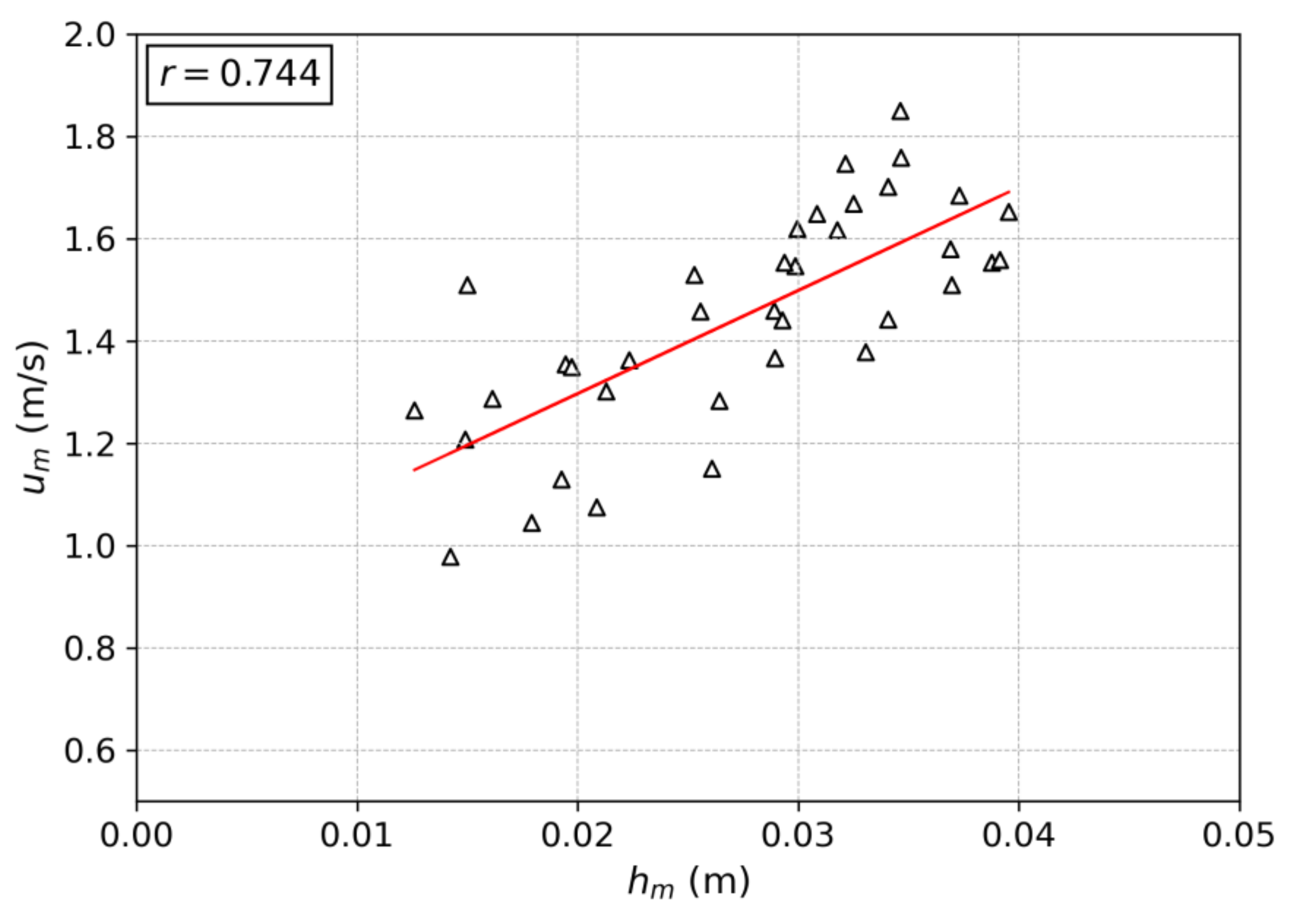
In this study, the OFV and OLT were measured from the same wave overtopping event. The maximum OFV occurred in the beginning stage first, and then the maximum OLT followed. There was little time difference between the maximum values, and they showed a similar temporal distribution pattern, which indicates the largest momentum of the flow occurs in the wavefront. From coupling OFV and OLT for the same event, there was a positive linear relationship between these two variables. This result differs from the result obtained by Mares-Nasarre et al. [
10] and Hughes et al. [
21], where there is no clear relationship between OFV and OLT. This difference may be due to the different methods used in the experiments. In this study, the spatial and temporal investigation using imaging techniques provided detailed information about the behavior of the overtopping flow properties, such as flow velocity and layer thickness. The OFV is determined from one of the vertically distributed horizontal velocity components, unlike the previous studies employing a point velocimeter. Moreover, the aeration of the overtopping flow is likely to lead to the inaccurate acquisition of the free surface by a capacitance-type wave gauge. From the flow images, the aeration was observed in the wave front where the max OLT occurred, which implies the possibility of errors in catching maximum values. From the positive relationship between OFV and OLT in this study, the rapidly increasing rate of momentum is expected relative to OFV and OLT.
6. Conclusions
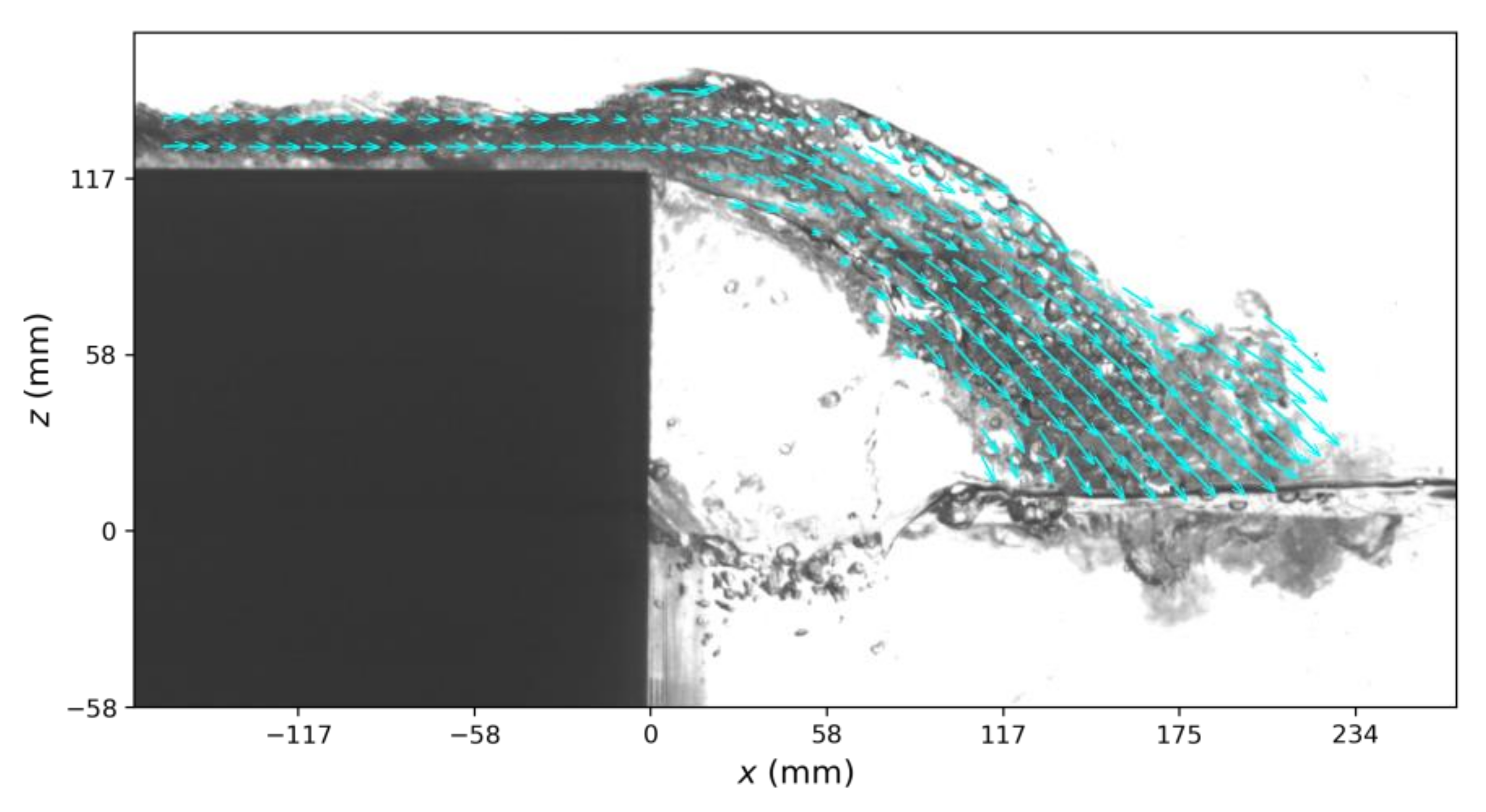
The wave overtopping occurs when the wave run-up, , is higher than the crest freeboard of a coastal structure, . In such conditions, the water wave affects not only the structure’s front slope but also the structure’s crest and rear side. In addition, wave overtopping also poses a threat to the safety of people and vehicles on the structure crest. However, most of the previous studies have focused on wave overtopping flow parameters on impermeable structures such as sea dikes, with only a few studies on breakwaters. To address this gap, this study investigated OFV and OLT on composite breakwaters through physical experimentation. In this study, 55 physical tests for the composite breakwater with the tetrapod armors were performed on the two-dimensional wave flume. The OFV at the rear edge of the breakwater crest was measured using a digital imaging technique called bubble image velocimetry (BIV), which provides reliable measurements without disturbing the overtopping flow. The OLT was measured by digitizing the digital images obtained from the BIV technique.
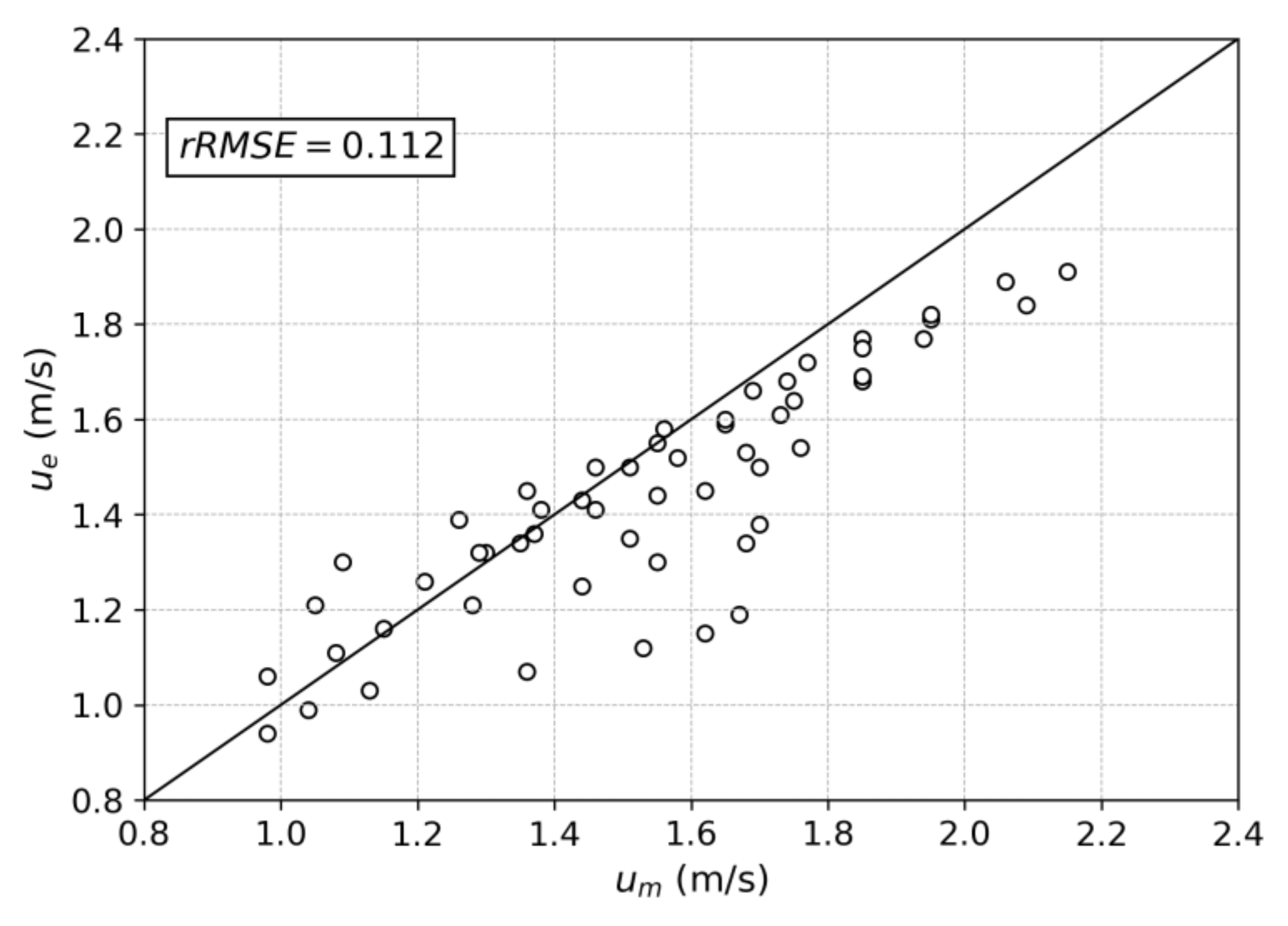
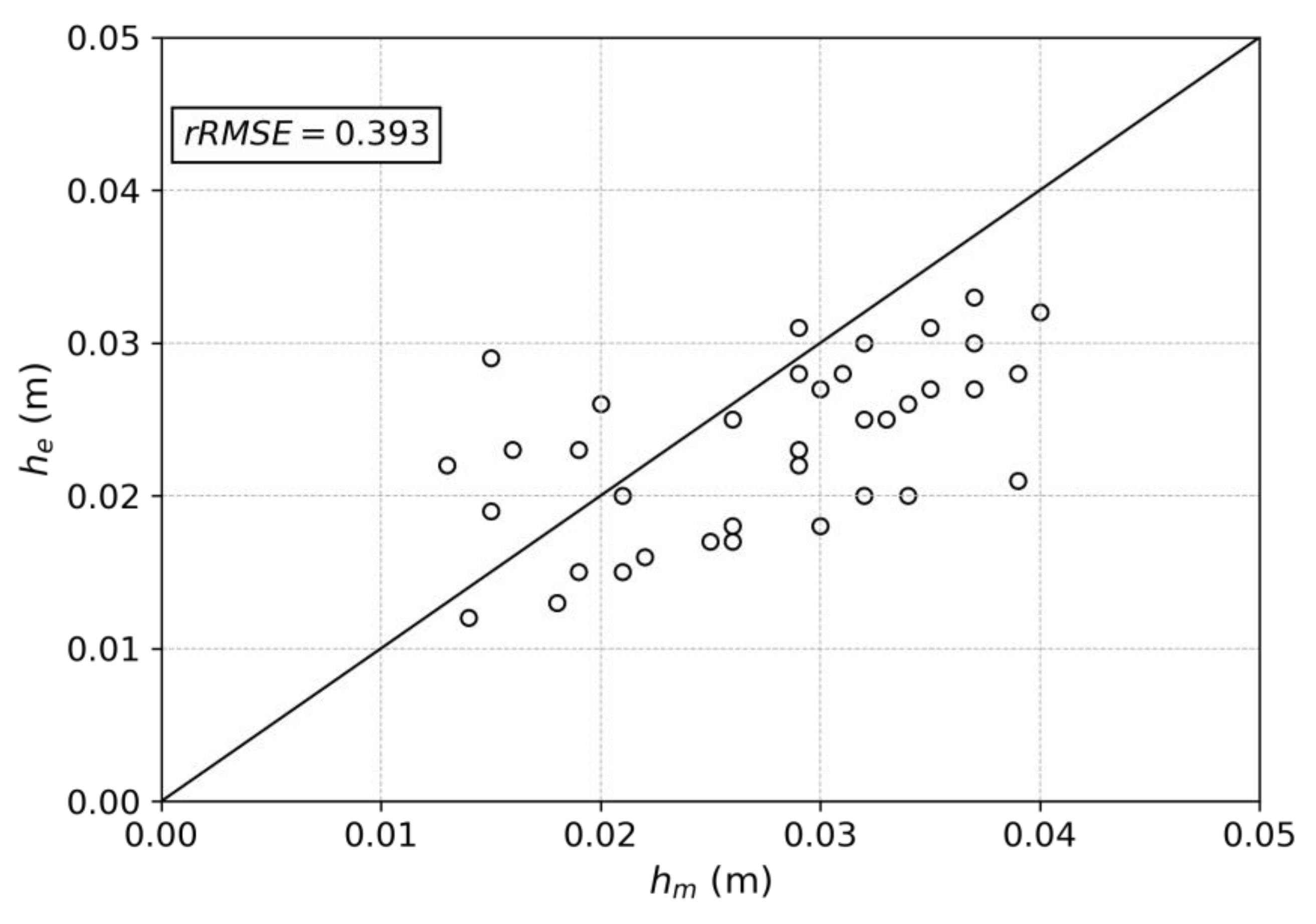
The measured OFV and OLT were compared with the empirical equations provided in EurOtop [
2], Schüttrumpf and van Gent [
15], and van der Meer et al. [
7]. The roughness factor,
, in Equation (12) and the empirical coefficients,
and
, in Equations (5) and (6) were calibrated with the experiment data. The new roughness factor for the two-layered tetrapods,
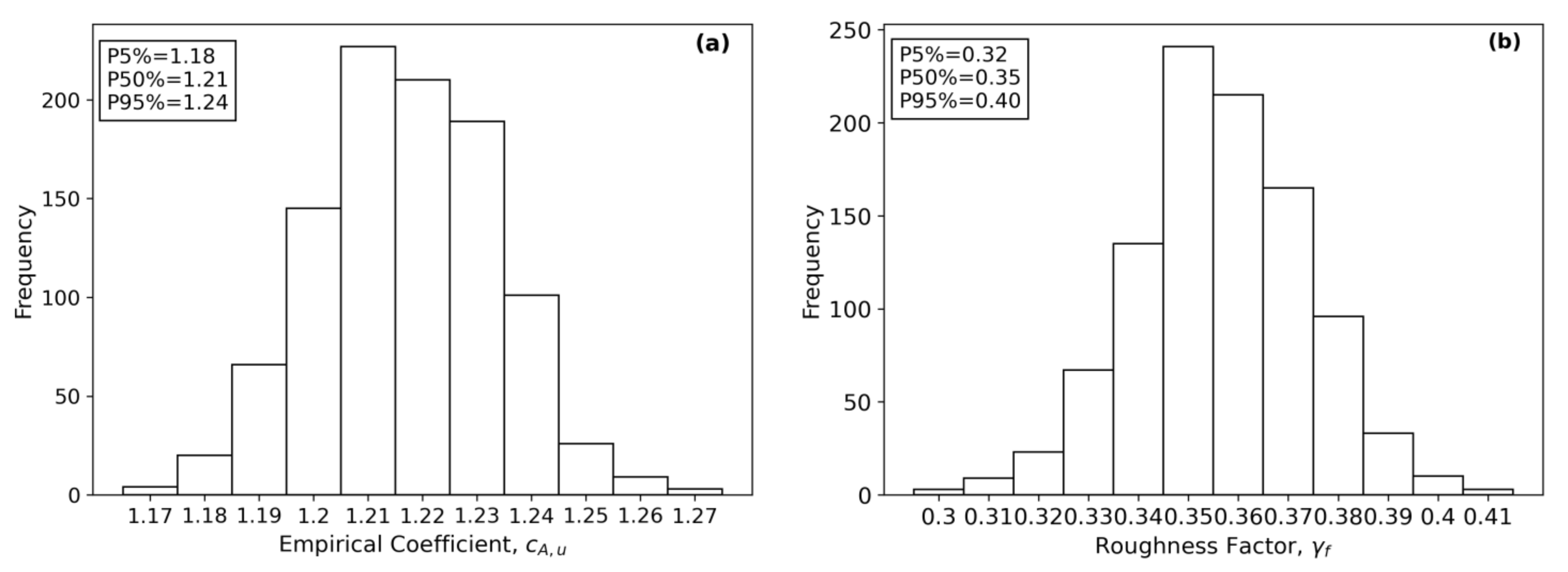
0.35, and empirical coefficients,
1.21 and
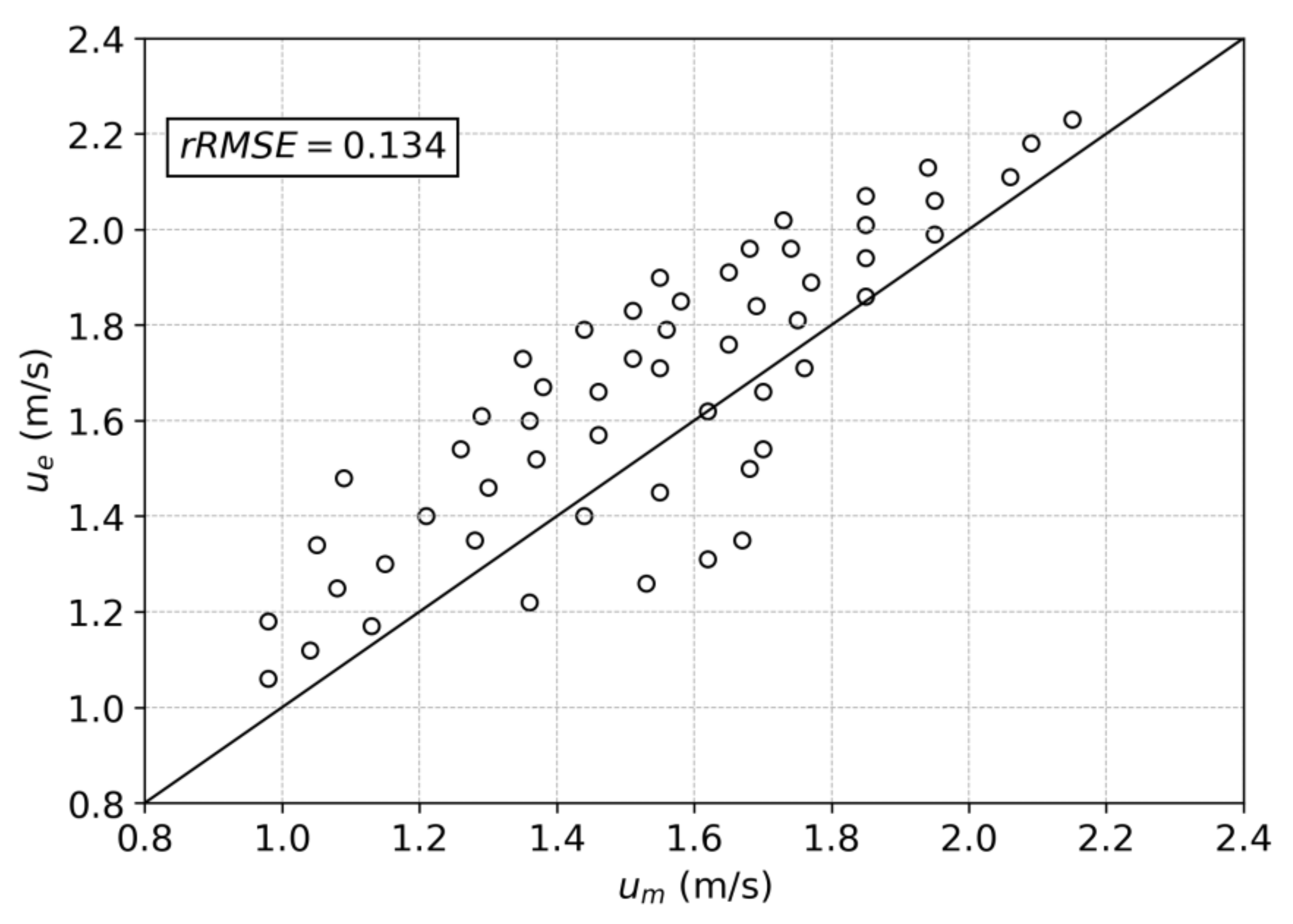
0.21, were obtained through the bootstrap resampling technique. The rRMSE for the estimation of OFV was 0.112 and that of the OLT was 0.393. The new empirical coefficients and roughness factor obtained in this study were used to estimate the OFV and OLT in various wave conditions, which shows promising results for relevant coefficient determination. However, the agreements between the estimations and the measurements are not consistent over all wave conditions and structure geometries. In particular, the estimation for short-wave conditions showing discrepancies needs to be approached through another empirical formula. The results of this study are applicable to composite breakwater structures with armor slope
1:1.5 and relative crest freeboard 0.6
1 in non-breaking wave condition 0.008
0.057. More advanced empirical approaches are needed and will be further tested for irregular wave conditions as well.
From the temporal change of OFV and OLT, both parameters show the maximum values with little time difference in the wavefront, having a pattern of sudden increase and gradual decrease. Therefore, the largest momentum of the overtopping flow is expected to occur in the beginning stage of the flow. There is also a positive relationship between OFV and OLT for the same overtopping event, which implies that the momentum of the flow and overtopping volume would increase rapidly.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}