
Enhancement of the Robustness on Advancing Layer Method with Trimmed Hexahedral Volume Mesh for the Generation of the Boundary Layer Grids

Abstract
:1. Introduction
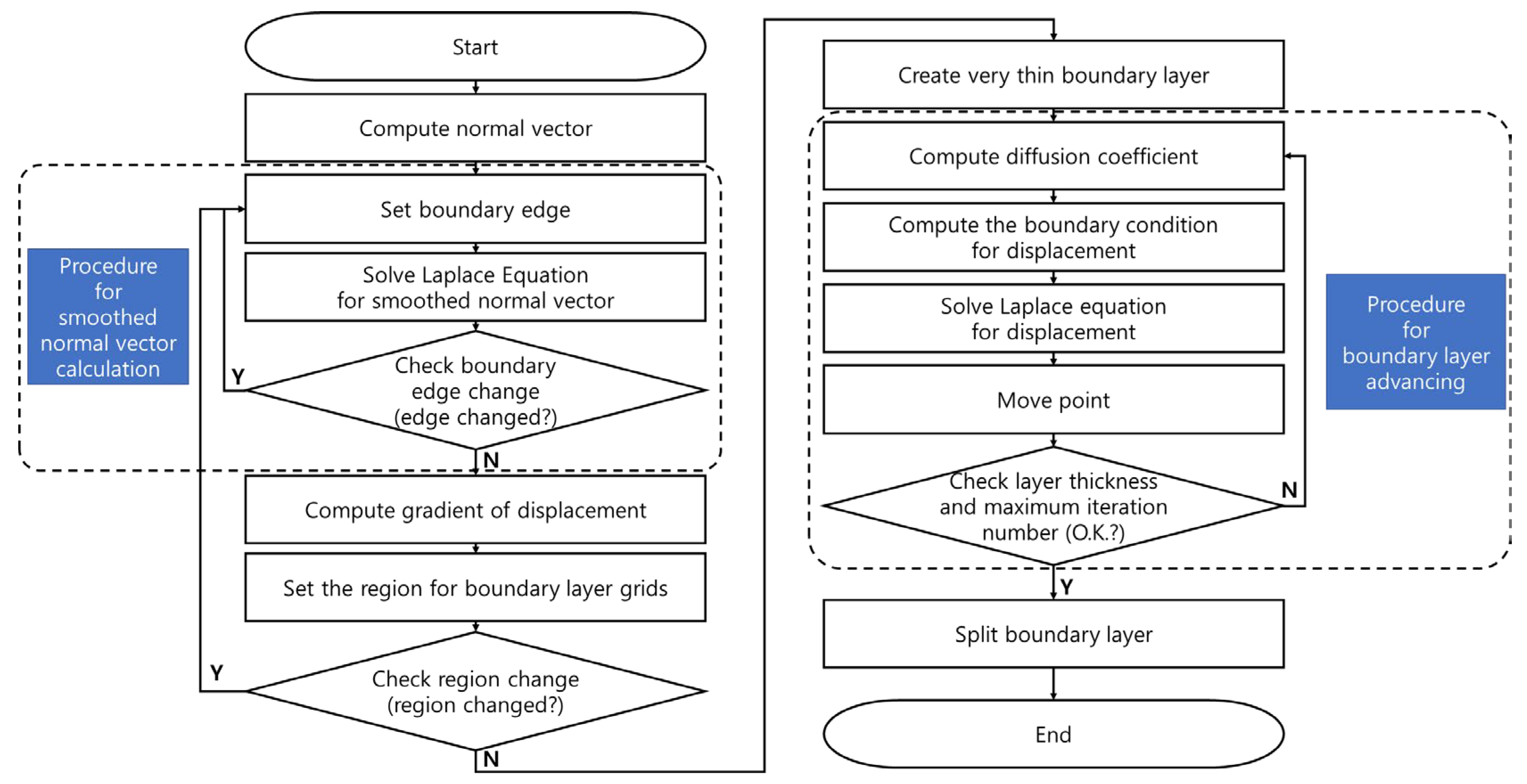
2. Numerical Methods
- Calculating normal vectors of boundary faces,
- Calculating smoothed normal vector and displacement vector,
- Searching for the regions where boundary layer grids cannot be generated,
- Recalculating smoothed normal vector and displacement vector,
- Creating very thin boundary layer grids by copying corresponding boundary grids,
- Creating a boundary layer grid by moving the copied grid points while gradually increasing the displacement vector,
- Cutting and finalizing the boundary layer grids.

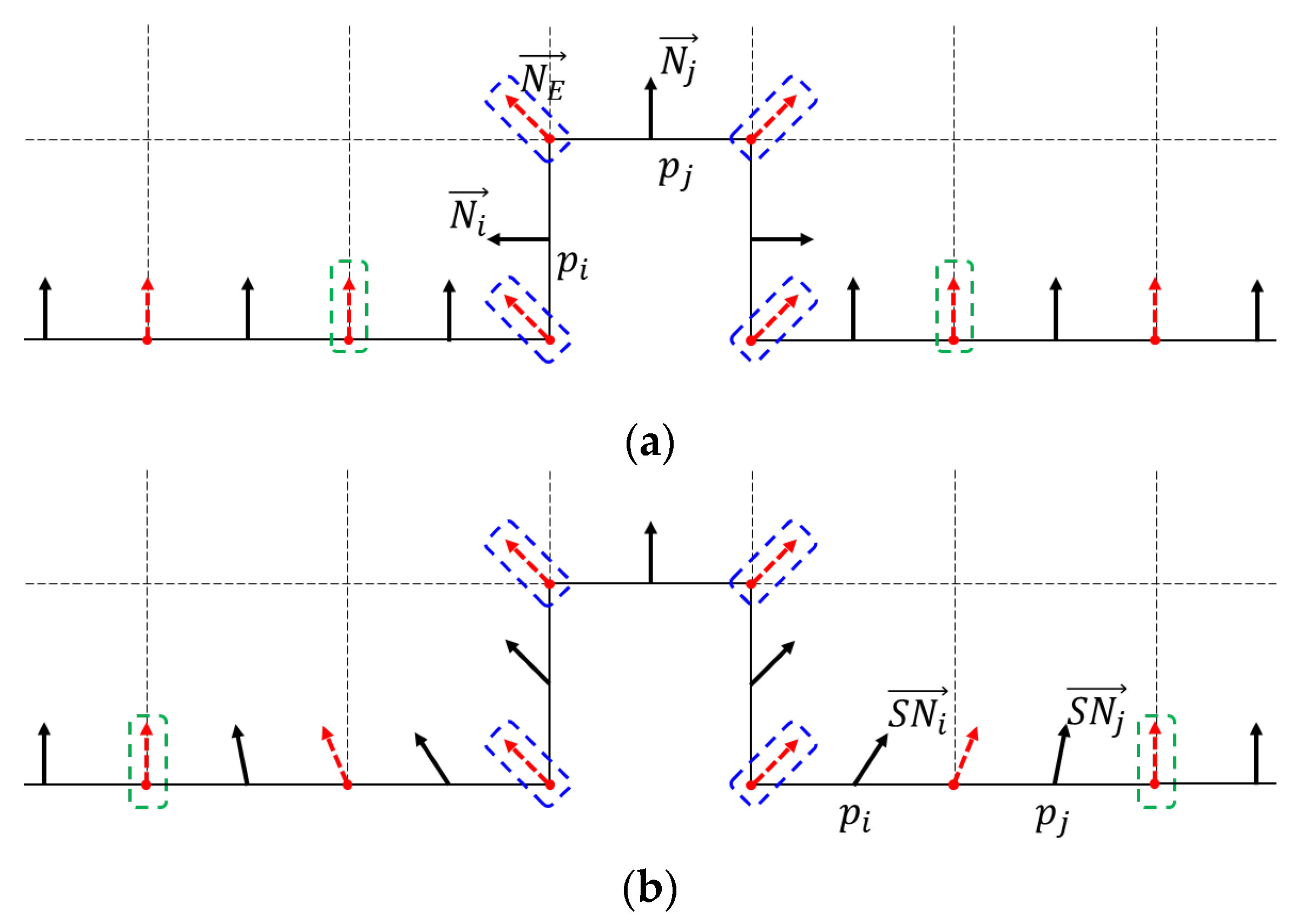
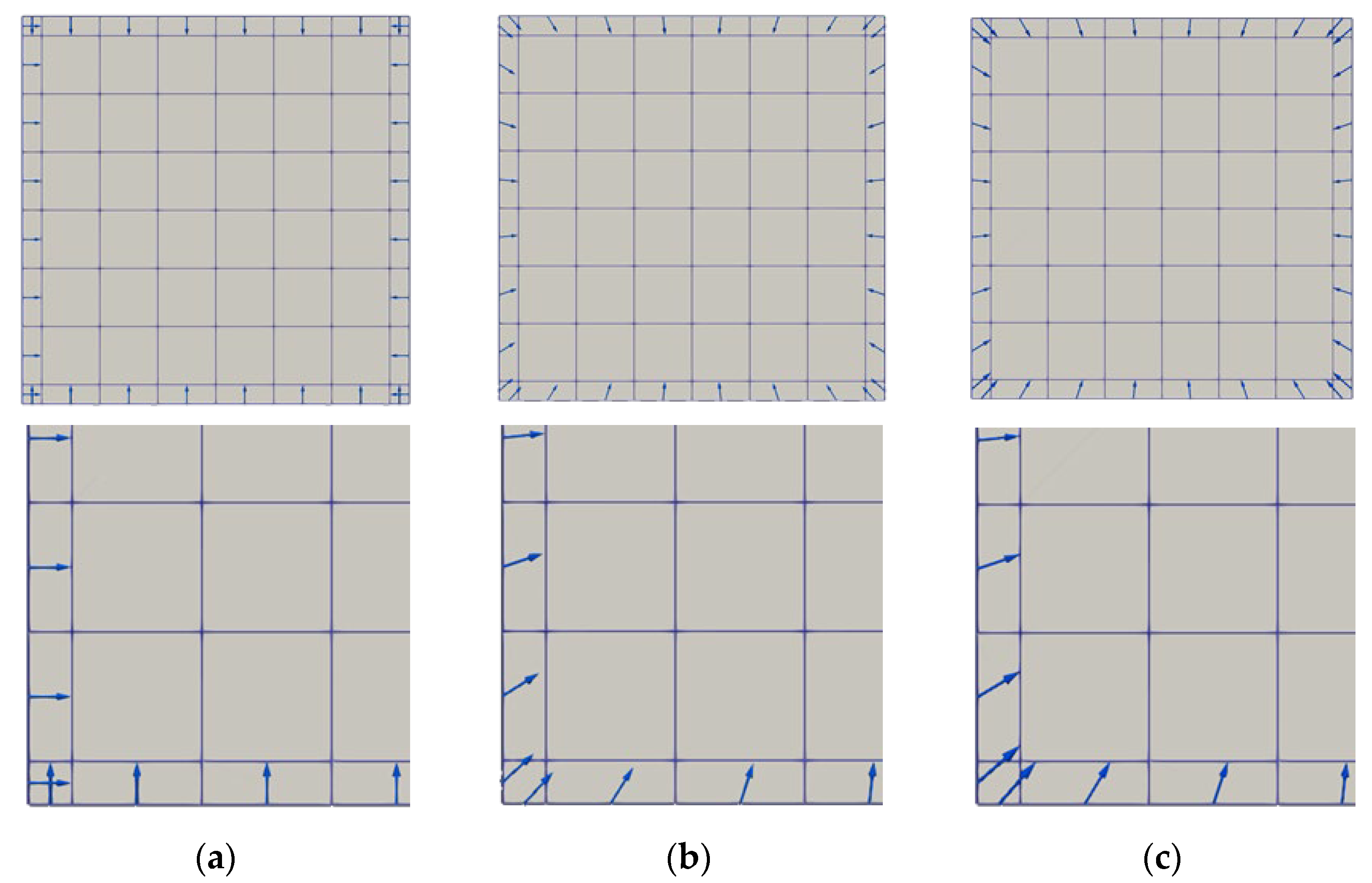
2.1. Advancing Direction Calculation
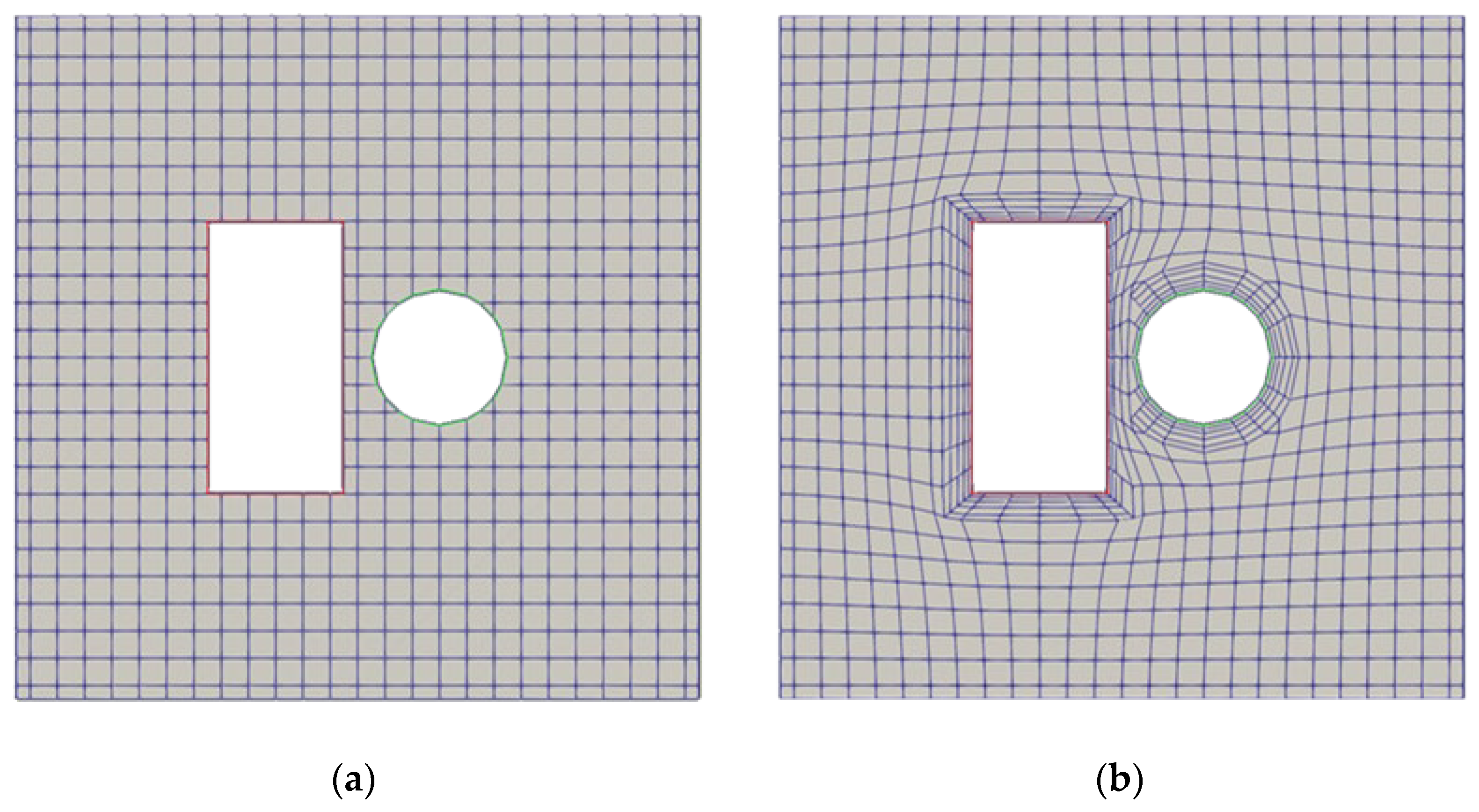
2.2. Front Advancing Technique
2.2.1. Exclusion of Narrow Regions
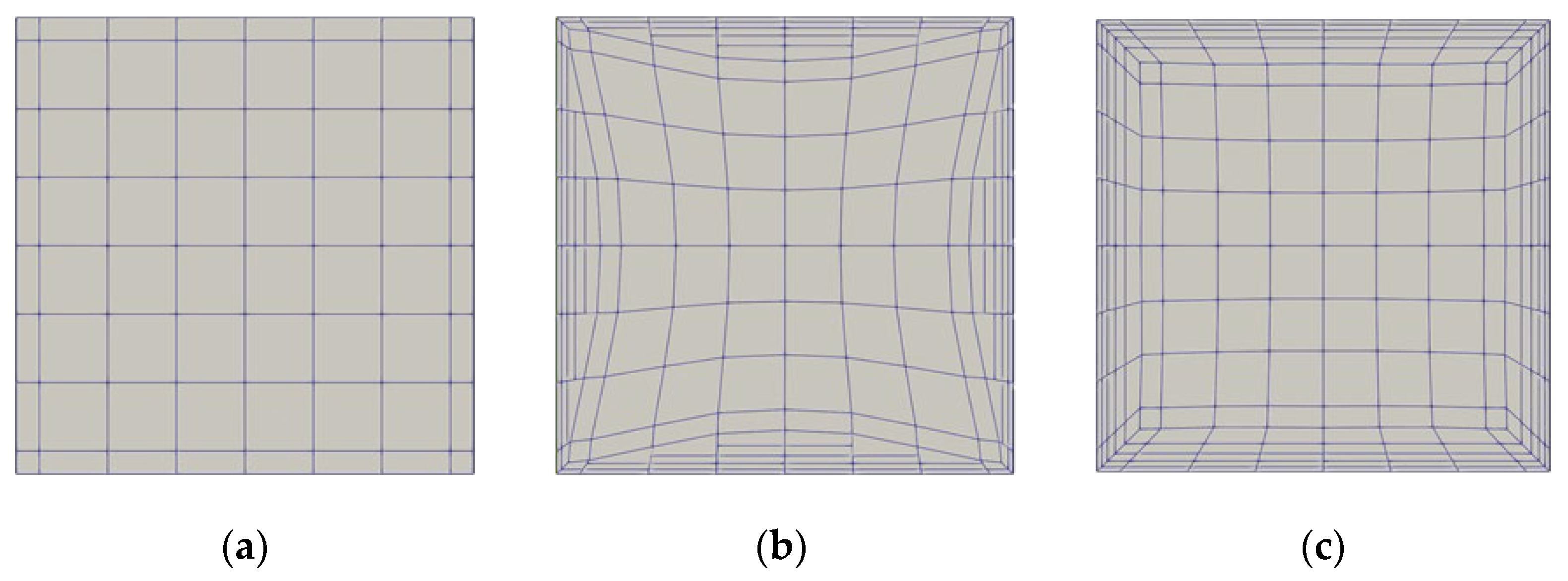
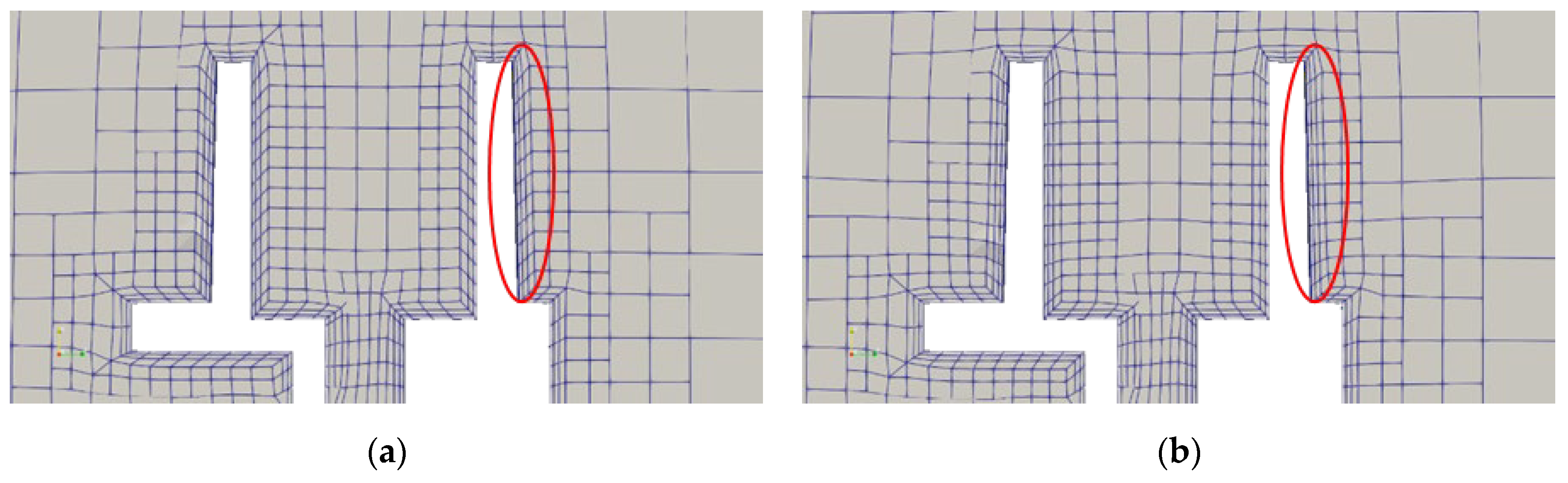
2.2.2. Gradual Front Advancing Method
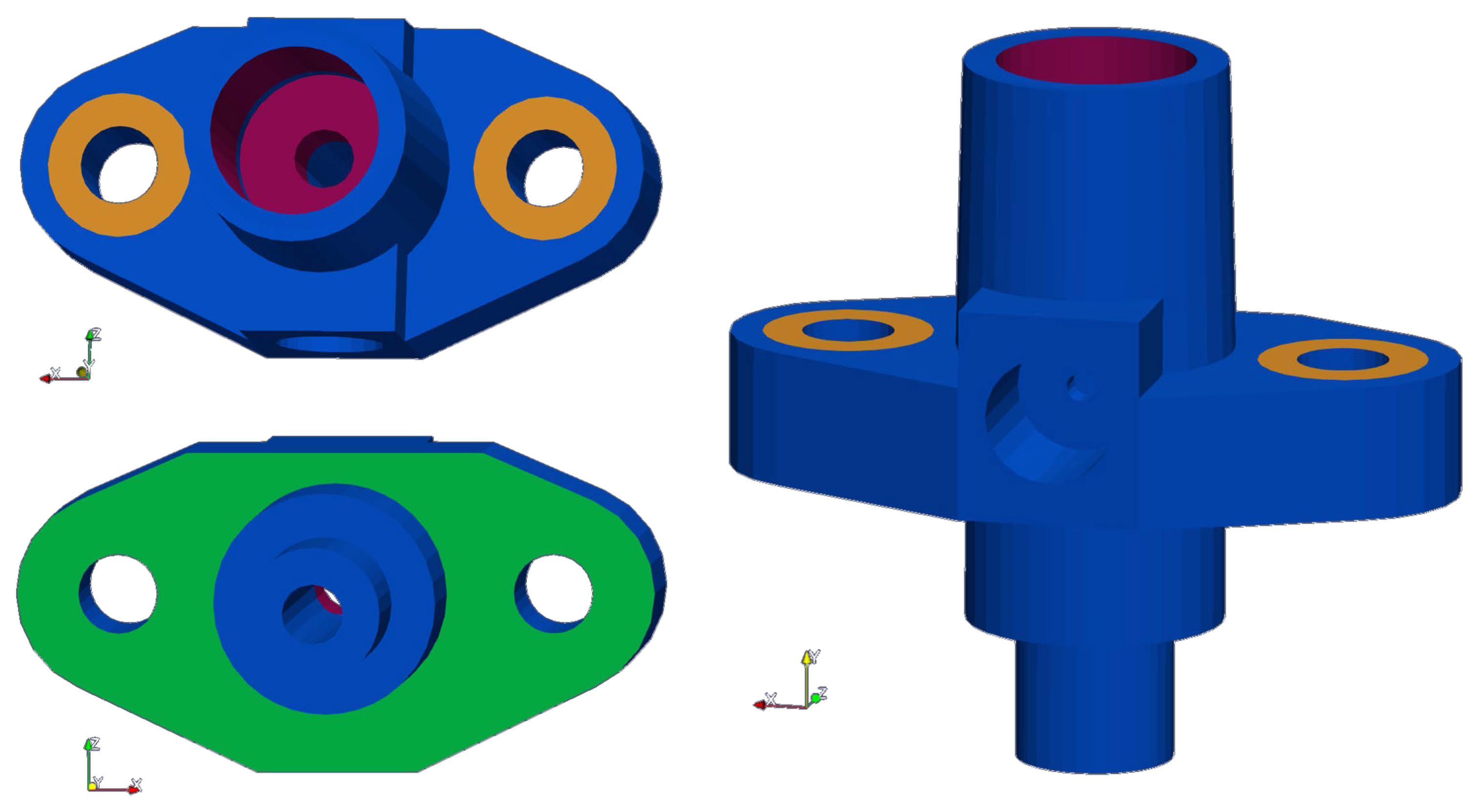
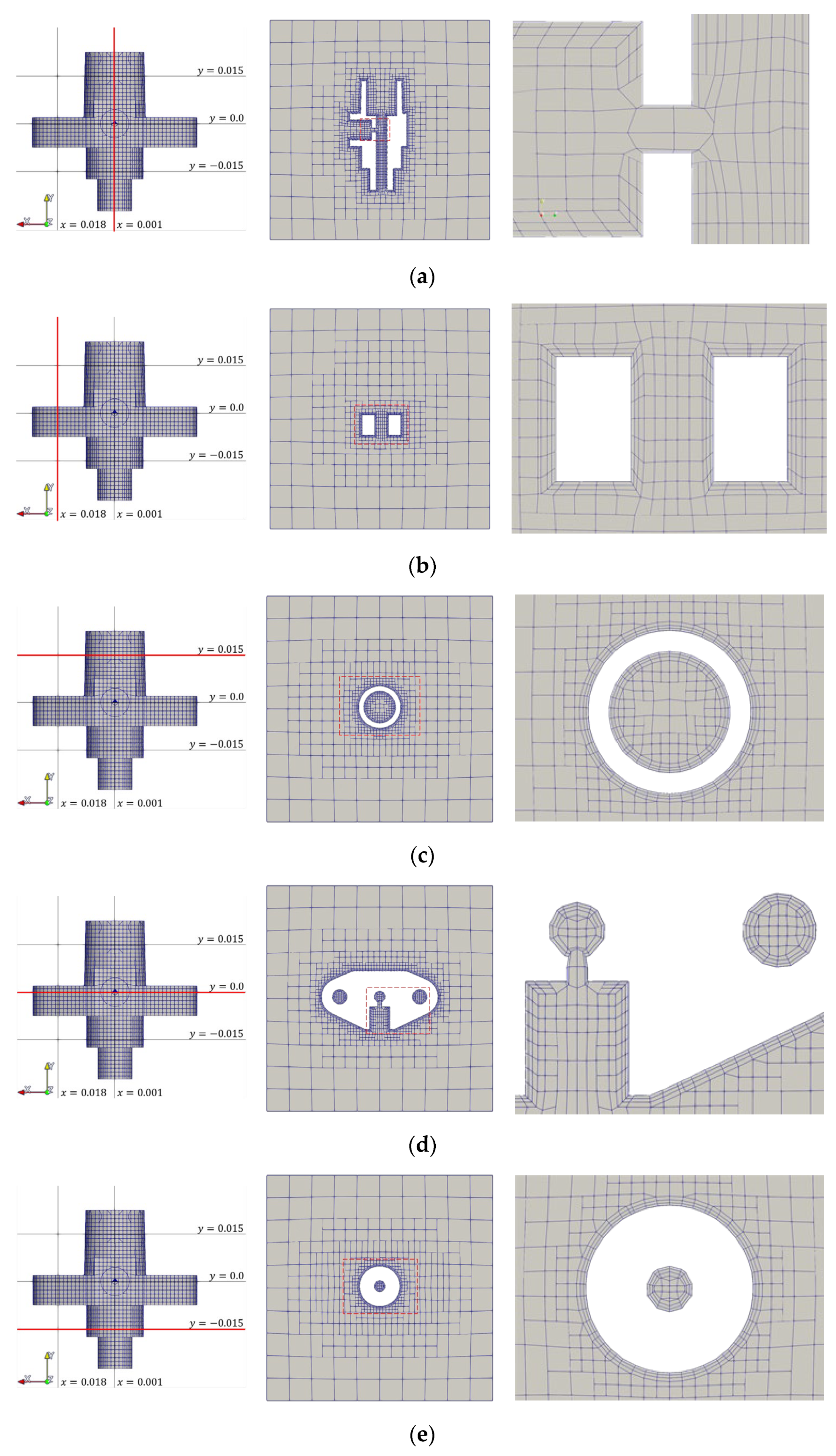
2.3. Applicatioon for Complex 3-D Geometry
3. Numerical Simulations: Application to Propeller Open Water (POW) Test
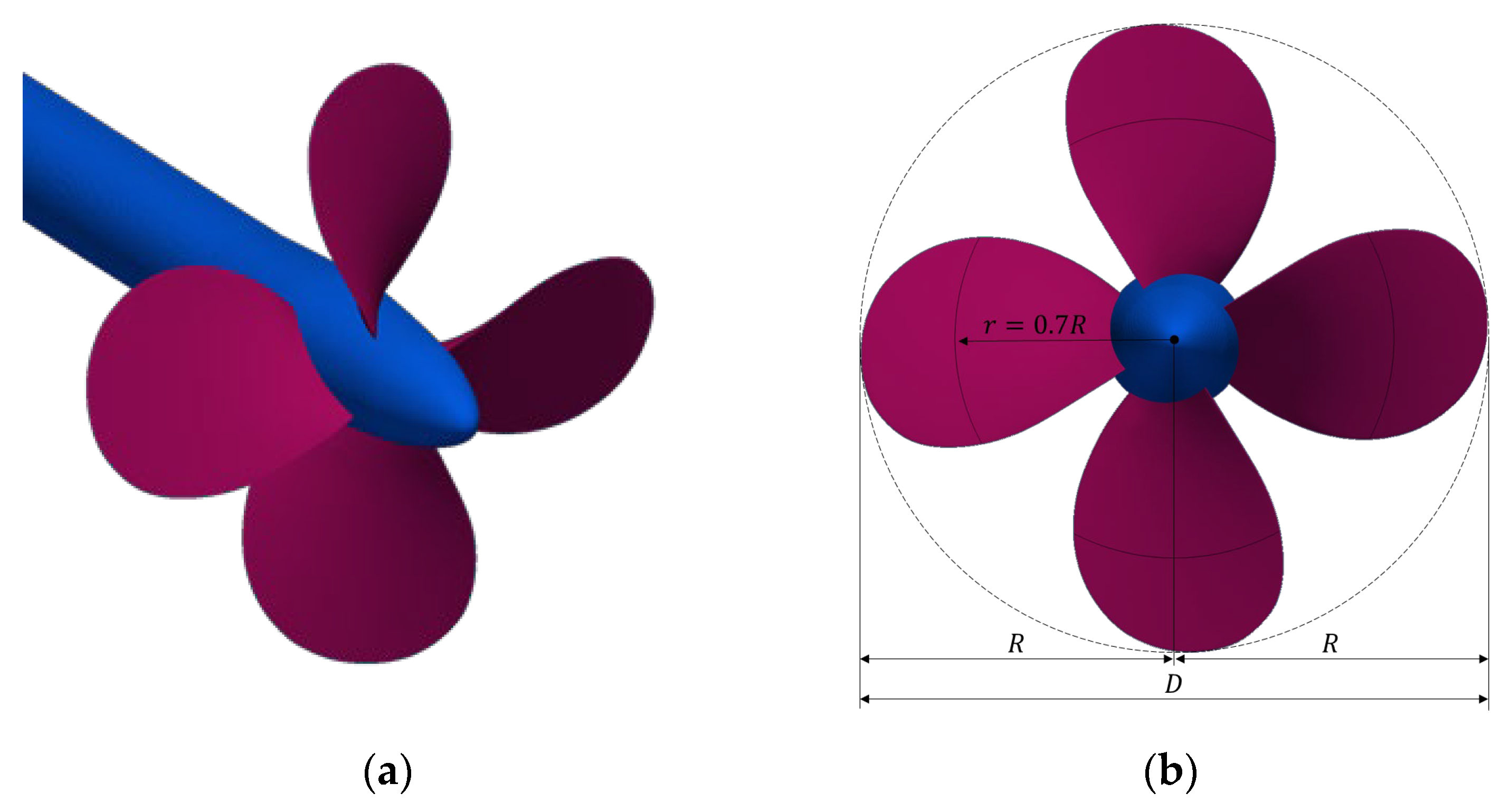
3.1. Subject Marine Propeller
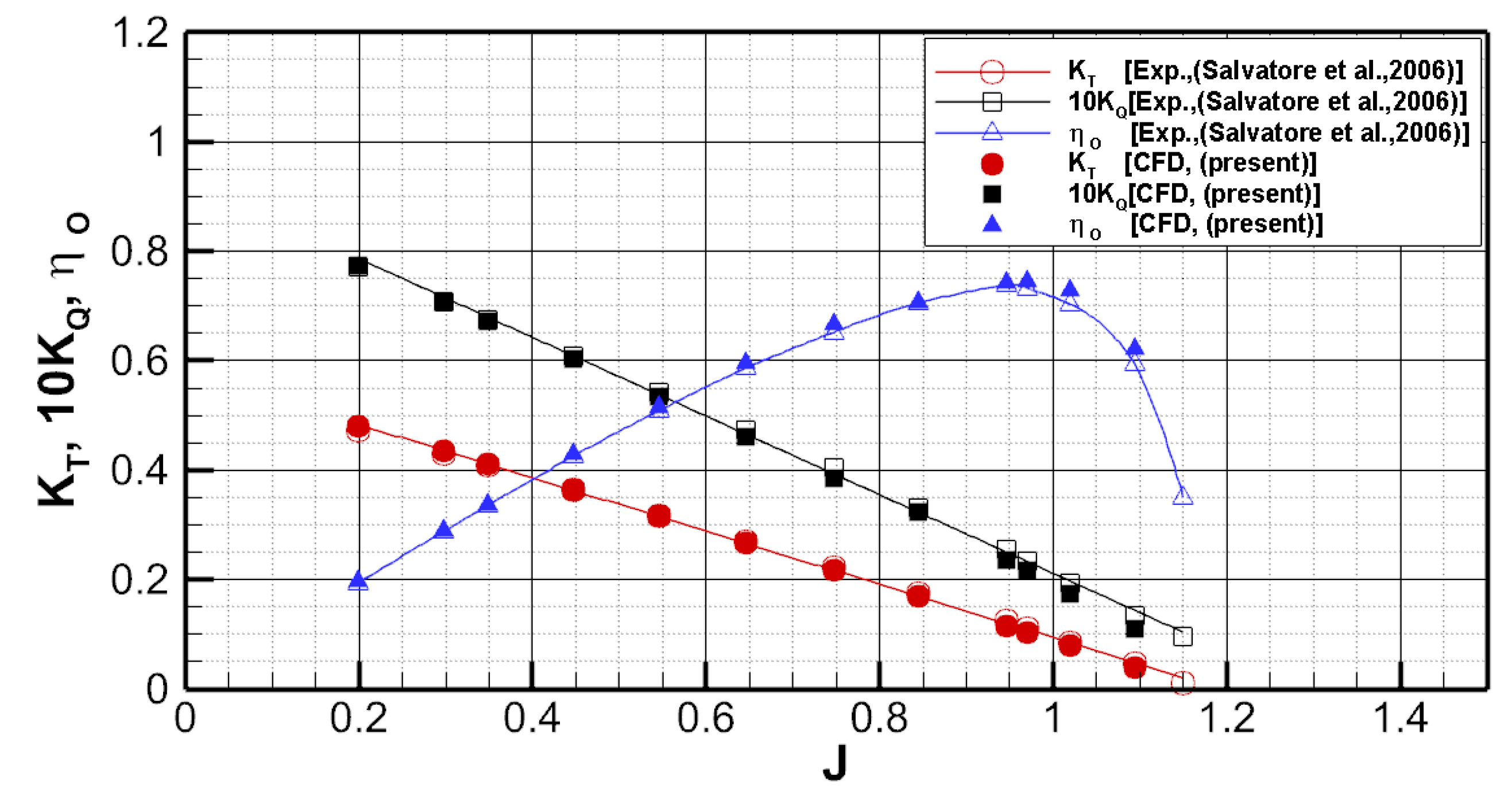
3.2. Non-Dimensional Coefficients
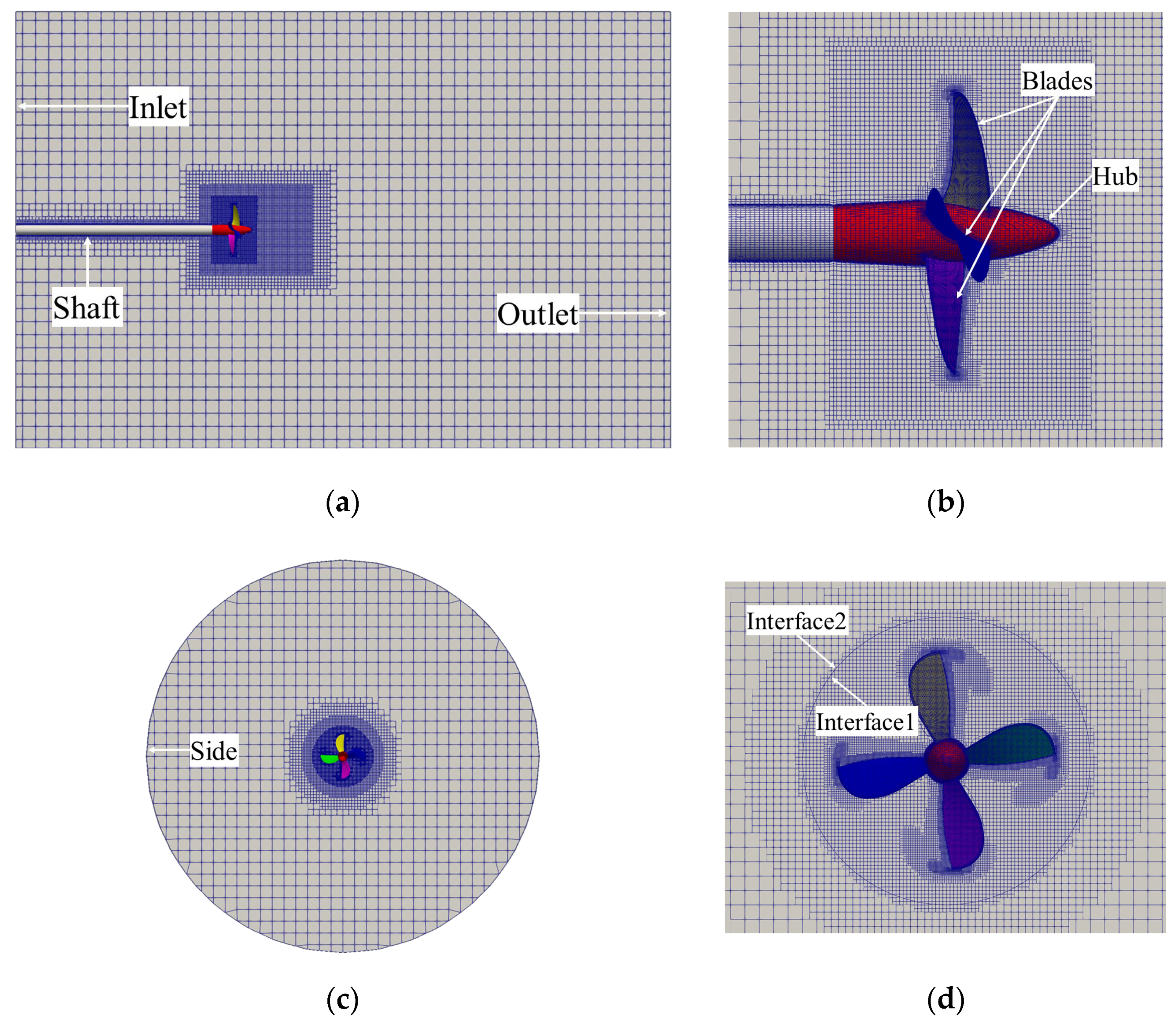
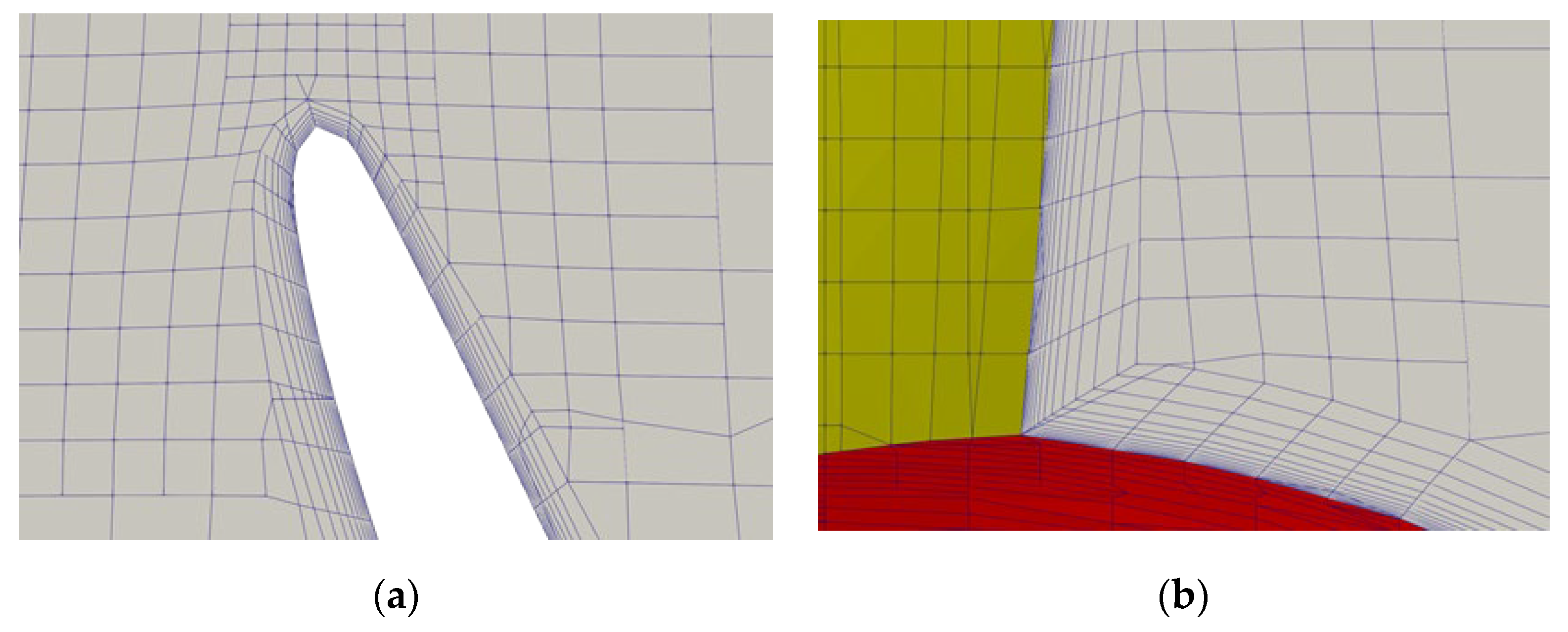
3.3. Grid Systems
3.4. Solver, Schemes, and Conditions
3.5. Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Thompson, J.F.; Warsi, Z.U.; Mastin, C.W. Numerical Grid Generation: Foundations and Applications, 1st ed.; Elsevier North-Holland Inc.: Amsterdam, The Netherlands, 1985. [Google Scholar]
- Mavriplis, D.J. Unstructured grid techniques. Annu. Rev. Fluid Mech. 1997, 29, 473–514. [Google Scholar] [CrossRef] [Green Version]
- Eymard, R.; Gallouët, T.; Herbin, R. Finite volume methods. In Handbook of Numerical Analysis; Elsevier: Amsterdam, The Netherlands, 2000; Volume 7, pp. 713–1018. [Google Scholar]
- Jeong, S.-M.; Lee, C.-Y. Weighted Moving Square-Based Solver for Unsteady Incompressible Laminar Flow Simulations. Appl. Sci. 2022, 12, 3519. [Google Scholar] [CrossRef]
- Löhner, R.; Parikh, P. Generation of three-dimensional unstructured grids by the advancing-front method. Int. J. Numer. Methods Fluids 1988, 8, 1135–1149. [Google Scholar] [CrossRef]
- Baker, T.J. Automatic mesh generation for complex three-dimensional regions using a constrained Delaunay triangulation. Eng. Comput. 1989, 5, 161–175. [Google Scholar] [CrossRef]
- Thompson, J.F.; Soni, B.K.; Weatherill, N.P. Handbook of Grid Generation; CRC Press: Boca Raton, FL, USA, 1998. [Google Scholar]
- Aftosmis, M.J.; Berger, M.J.; Melton, J.E. Robust and efficient cartesian mesh generation for component-based geometry. AIAA J. 1998, 36, 952–956. [Google Scholar] [CrossRef]
- Nakahashi, K. Building-cube method for flow problems with broadband characteristic length. In Computational Fluid Dynamics; Springer: Berlin/Heidelberg, Germany, 2003; pp. 77–81. [Google Scholar]
- Peskin, C.S. The immersed boundary method. Acta Numer. 2002, 11, 479–517. [Google Scholar] [CrossRef] [Green Version]
- Jeong, K.-L.; Seo, D.-W. Automatic polyhedral mesh generation for ship resistance based on the locally refined cartesian cut-cell method. J. Mar. Sci. Technol. 2020, 28, 3. [Google Scholar]
- Kim, H.-Y.; Kim, H.-G. A hexahedral-dominant FE meshing technique using trimmed hexahedral elements preserving sharp edges and corners. Eng. Comput. 2021, 38, 4307–4322. [Google Scholar] [CrossRef]
- Wang, Z.; Quintanal, J.; Corral, R. Accelerating advancing layer viscous mesh generation for 3D complex configurations. Comput. Aided Des. 2019, 112, 35–46. [Google Scholar] [CrossRef]
- Alauzet, F.; Loseille, A.; Marcum, D. On a robust boundary layer mesh generation process. In Proceedings of the 55th AIAA Aerospace Sciences Meeting, Grapevine, TX, USA, 9–13 January 2017. [Google Scholar]
- Garimella, R.V.; Shephard, M.S. Boundary layer mesh generation for viscous flow simulations. Int. J. Numer. Methods Eng. 2000, 49, 193–218. [Google Scholar] [CrossRef]
- Shin, M.-S.; Ki, M.-S.; Park, B.-J.; Lee, G.-J.; Lee, Y.-Y.; Kim, Y.; Lee, S.-B. Speed-Power Performance Analysis of an Existing 8,600 TEU Container Ship using SPA (Ship Performance Analysis) Program and Discussion on Wind-Resistance Coefficients. J. Ocean Eng. Technol. 2020, 34, 294–303. [Google Scholar] [CrossRef]
- Grlj, C.G.; Degiuli, N.; Farkas, A.; Martić, I. Numerical Study of Scale Effects on Open Water Propeller Performance. J. Mar. Sci. Eng. 2022, 10, 1132. [Google Scholar] [CrossRef]
- Jasak, H.; Vukčević, V.; Gatin, I.; Lalović, I. CFD validation and grid sensitivity studies of full scale ship self propulsion. Int. J. Nav. Archit. Ocean Eng. 2019, 11, 33–43. [Google Scholar] [CrossRef]
- Jeong, S.-M.; Son, B.-H.; Lee, C.-Y. Estimation of the Motion Performance of a Light Buoy Adopting Ecofriendly and Lightweight Materials in Waves. J. Mar. Sci. Eng. 2020, 8, 139. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.; Zou, L.; Zou, Z.; Guo, H. Assessment of CFD-Based Ship Maneuvering Predictions Using Different Propeller Modeling Methods. J. Mar. Sci. Eng. 2022, 10, 1131. [Google Scholar] [CrossRef]
- Song, S.; Park, S. Discrete Element Method Approach to Modeling Mechanical Properties of Three-Dimensional Ice Beams. J. Mar. Sci. Eng. 2022, 10, 1359. [Google Scholar] [CrossRef]
- Ng’aru, J.-M.; Park, S. CFD Simulations of the Effect of Equalizing Duct Configurations on Cavitating Flow around a Propeller. J. Mar. Sci. Eng. 2022, 10, 1865. [Google Scholar] [CrossRef]
- Kim, D.-H.; Park, J.-C.; Jeon, G.-M.; Shin, M.-S. CFD Simulation for Estimating Efficiency of PBCF Installed on a 176K Bulk Carrier under Both POW and Self-Propulsion Conditions. Processes 2021, 9, 1192. [Google Scholar] [CrossRef]
- Jeong, K.-L.; Jeong, S.-M. A Mesh Deformation Method for CFD-Based Hull form Optimization. J. Mar. Sci. Eng. 2020, 8, 473. [Google Scholar] [CrossRef]
- Pereira, F.; Di Felice, F.; Salvatore, F. Numerical investigation of the cavitation pattern on a marine propeller: Validation vs experiments. In Proceedings of the 23rd ITTC, Venice, Italy, 8–14 September 2002. [Google Scholar]
- Pereira, F.; Salvatore, F.; Di Felice, F. Measurement and modeling of propeller cavitation in uniform inflow. J. Fluid Eng. 2004, 126, 671–679. [Google Scholar] [CrossRef]
- Pereira, F.; Salvatore, F.; Di Felice, F.; Soave, M. Experimental investigation of a cavitating propeller in non-uniform inflow. In Proceedings of the Twenty-Fifth ONR Symposium on Naval Hydrodynamics, St. John’s, NL, Canada, 8–13 August 2004. [Google Scholar]
- Salvatore, F.; Pereira, F.; Felli, M.; Calcagni, D.; Felice, F.D. Description of the INSEAN E779A Propeller Experimental Dataset. Technical Report 2006-085, INSEAN; 2006. Available online: https://www.researchgate.net/publication/259671974_Description_of_the_INSEAN_E779A_Propeller_Experimental_Dataset (accessed on 17 January 2023).
- Salvatore, F.; Streckwall, H.; Terwisga, T. Propeller cavitation modeling by CFD results from the VIRTUE 2008. In Proceedings of the 1st International Symposium on Cavitation (SMP ’09), Trondheim, Norway, 22–24 June 2009; pp. 362–371. [Google Scholar]
- Patankar, S.V. Numerical Heat Transfer and Fluid Flow; Taylor & Francis: Oxford, UK, 1980. [Google Scholar]
- Menter, F.R.; Langtry, R.; Volker, S. Transition modelling for general purpose CFD codes. Flow Turbul. Combust. 2006, 77, 277–303. [Google Scholar] [CrossRef]
- Langtry, R.B. A Correlation-Based Transition Model Using Local Variables for Unstructured Parallelized CFD Codes. Ph.D. Thesis, Universität Stuttgart, Stuttgart, Germany, 2006. [Google Scholar]
- Langtry, R.B.; Menter, F.R. Correlation-based transition modeling for unstructured parallelized computational fluid dynamics codes. AIAA J. 2009, 47, 2894–2906. [Google Scholar]
- Lingu, A. Scale effects on a tip rake propeller working in open water. J. Mar. Sci. Eng. 2019, 7, 404. [Google Scholar]
- Moran-Guerrero, A.; Miguel Gonzalez-Gutierrez, L.M.; Oliva-Remola, A.; Diaz-Ojeda, H.R. On the influence of transition modeling and crossflow effects on open water propeller simulations. Ocean Eng. 2018, 156, 101–119. [Google Scholar] [CrossRef]
- Andersson, J.; Eslamdoost, A.; Patrao, A.C.; Hyensjo, M.; Bensow, R.E. Energy balance analysis of a propeller in open water. Ocean Eng. 2018, 158, 162–170. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter (Unit) | Value |
|---|---|
| Diameter (m) | 0.2272 |
| Radius (m) | 0.1136 |
| Chord length at (m) | 0.086 |
| Number of blades (-) | 4 |
| Pitch ratio (-) | 1.1 |
| Skew angle at the blade tip (°) | 4.80 (positive) |
| Nominal rake (°) | 4.59 (forward) |
| Expanded area ratio (-) | 0.689 |
| Hub diameter (m) | 0.04553 |
| Hub length (m) | 0.06830 |
| Boundaris | P | U | k | Omega | |
|---|---|---|---|---|---|
| Blade, hub, shaft | fixedFluxPressure | rotatingWallVelocity | kqRWallFunction | omegaWallFunction | zeroGradient |
| Inlet | zeroGradient | fixedValue | |||
| Outlet | fixedValue | zeroGradient | |||
| Interface1 | cyclicAMI | ||||
| Interface2 | cyclicAMI | ||||
| Side | symmetry | ||||
| Convection Terms | Gauss Linear Upwind with Cell Limiter |
|---|---|
| Diffusion terms | Gauss linear |
| Matrix solver | Pressure: Geometric algebraic multi-grid (GAMG) with Gauss–Seidel smoother Other: smoothSolver with symGaussSeidel; |
| Parameter (Unit) | Value |
|---|---|
| RPS of propeller (/s) | 11.7881 |
| Inflow velocity (m/s) | 0.533~2.931 |
| Advance ratio (-) | 0.199~1.094 |
| Density of water (kg/m3) | 1006.5 |
| Dynamic viscosity of water (m2/s) | |
| Reynolds number at (-) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jeong, K.-L.; Park, S.; Jeong, S.-M. Enhancement of the Robustness on Advancing Layer Method with Trimmed Hexahedral Volume Mesh for the Generation of the Boundary Layer Grids. J. Mar. Sci. Eng. 2023, 11, 454. https://doi.org/10.3390/jmse11020454
Jeong K-L, Park S, Jeong S-M. Enhancement of the Robustness on Advancing Layer Method with Trimmed Hexahedral Volume Mesh for the Generation of the Boundary Layer Grids. Journal of Marine Science and Engineering. 2023; 11(2):454. https://doi.org/10.3390/jmse11020454
Chicago/Turabian StyleJeong, Kwang-Leol, Sunho Park, and Se-Min Jeong. 2023. "Enhancement of the Robustness on Advancing Layer Method with Trimmed Hexahedral Volume Mesh for the Generation of the Boundary Layer Grids" Journal of Marine Science and Engineering 11, no. 2: 454. https://doi.org/10.3390/jmse11020454