
Lightweight Robotic Joint with Thermally Activated Paraffin Actuator in the Deep Sea

Abstract
:1. Introduction
2. Materials and Methods
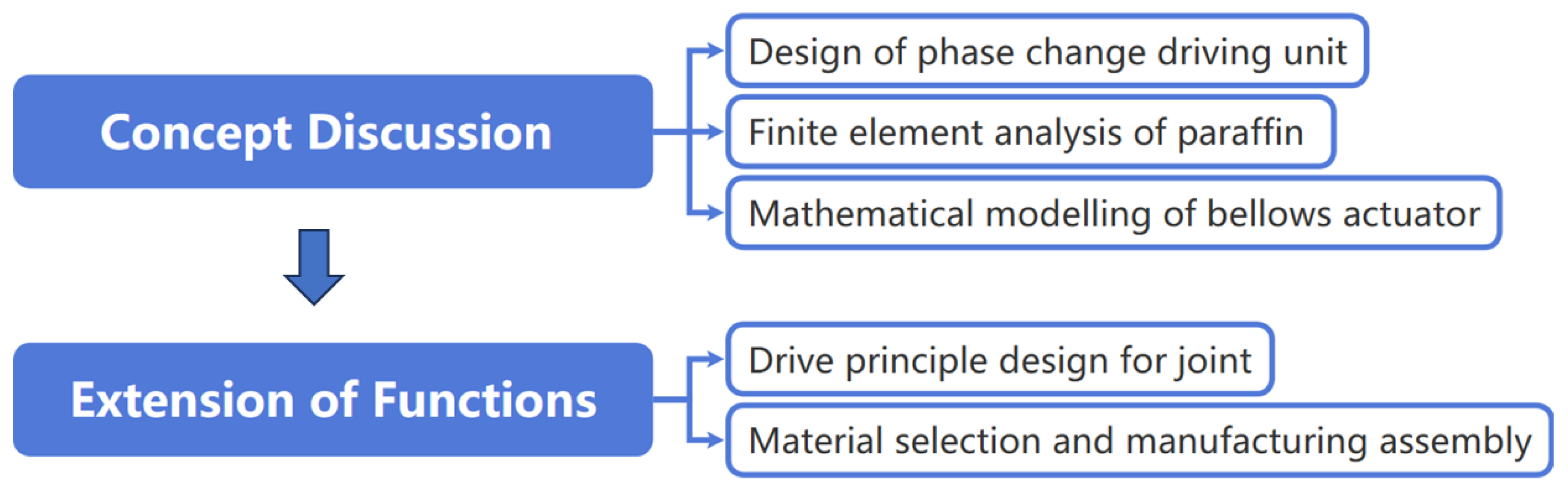
2.1. Design and Analysis of Paraffin Phase Change Flexible Actuator
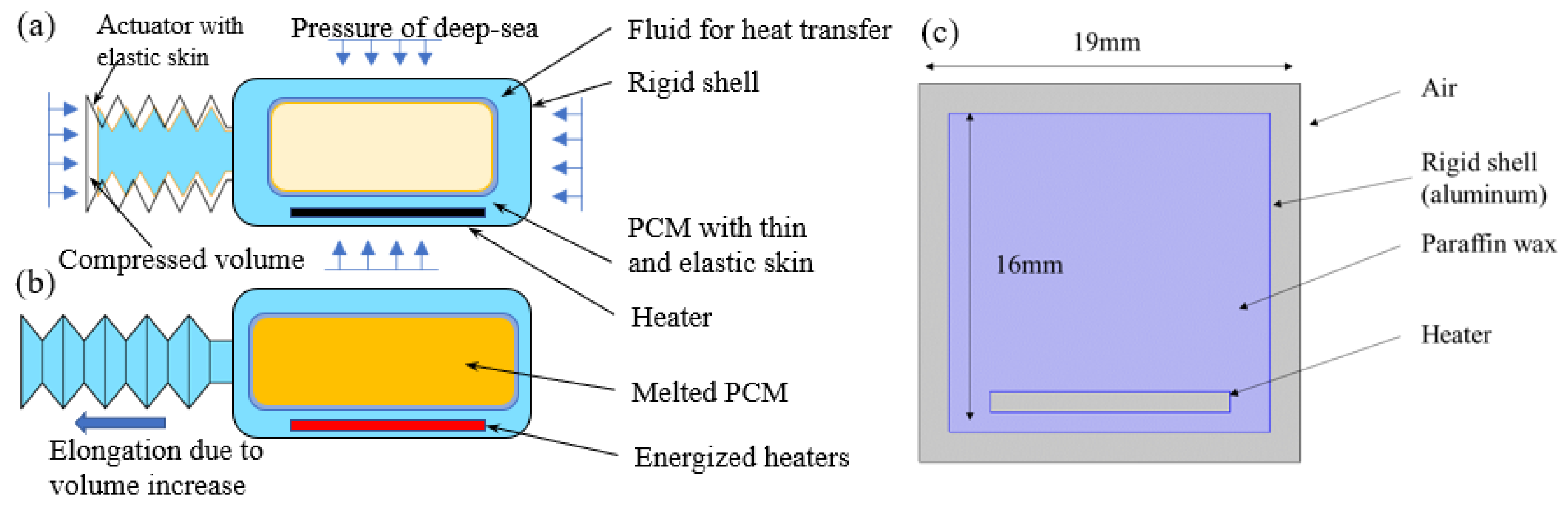
2.1.1. Analysis of the Actuator Principle
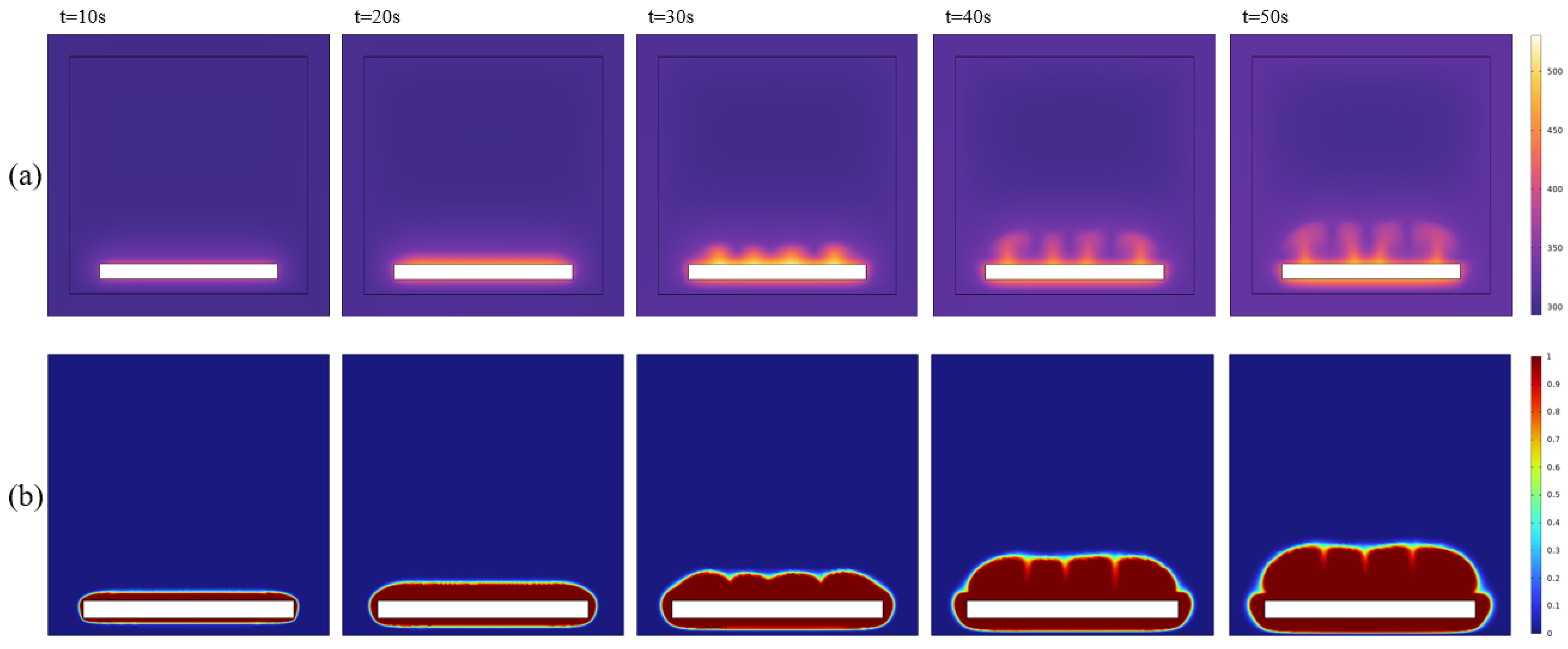
2.1.2. Establishment and Numerical Analysis of PCM Heat Transfer Model
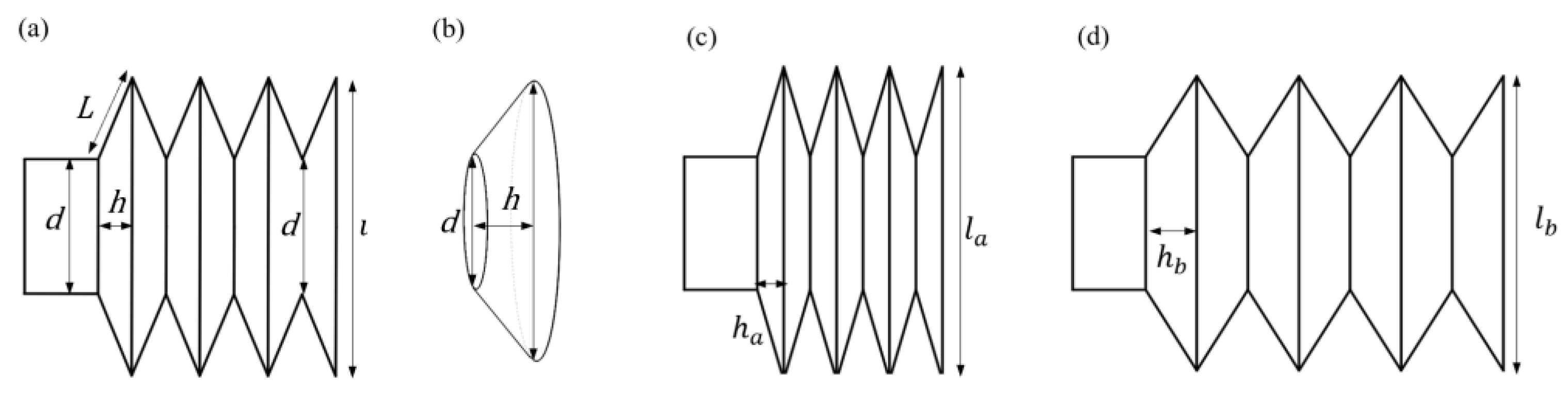
2.1.3. Mathematical Model for Expansion Based on Bellows Actuator
2.2. Structure and Analysis of the Joint
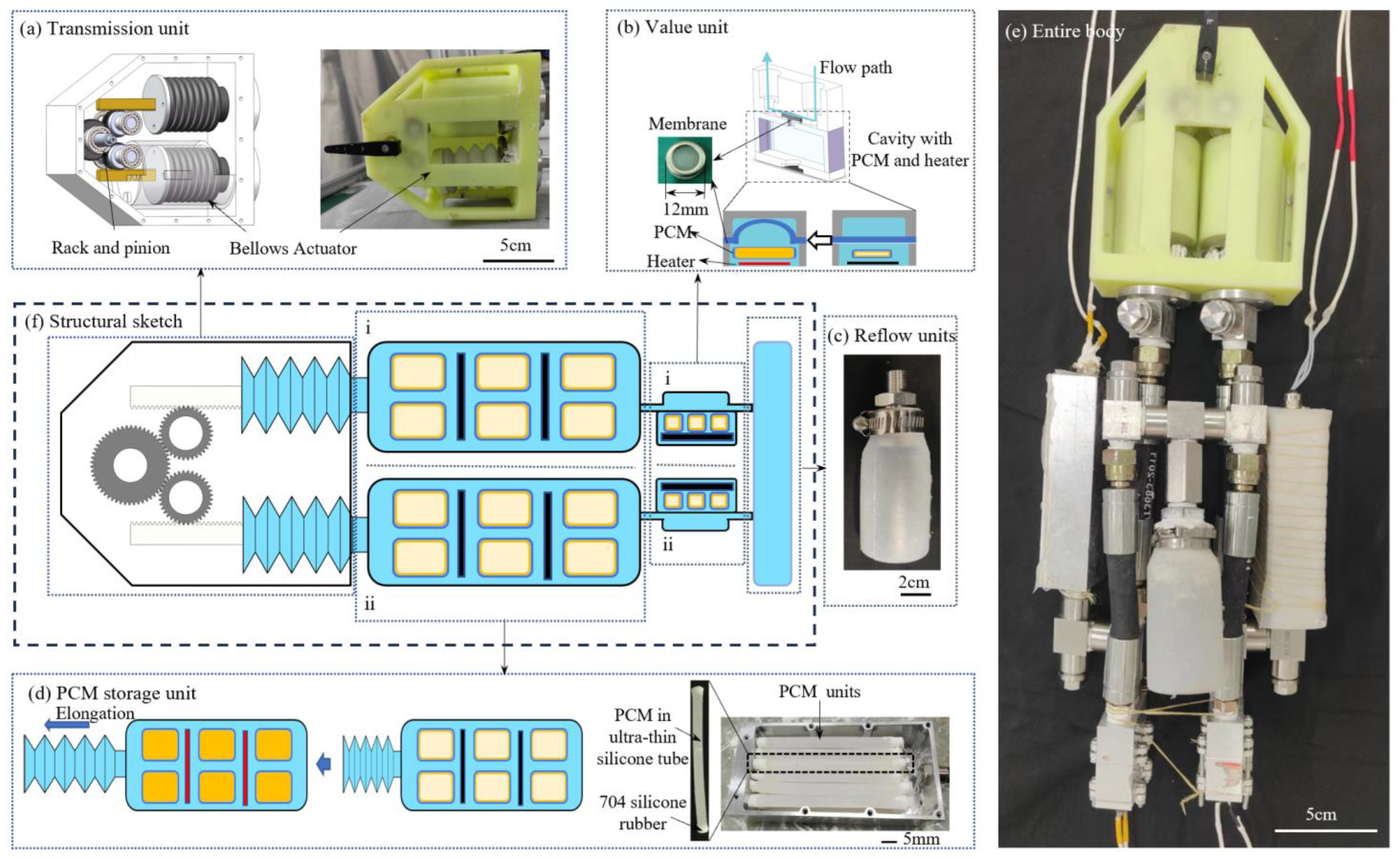
2.2.1. Structural Design, Manufacture, and Assembly
2.2.2. Working Mechanism
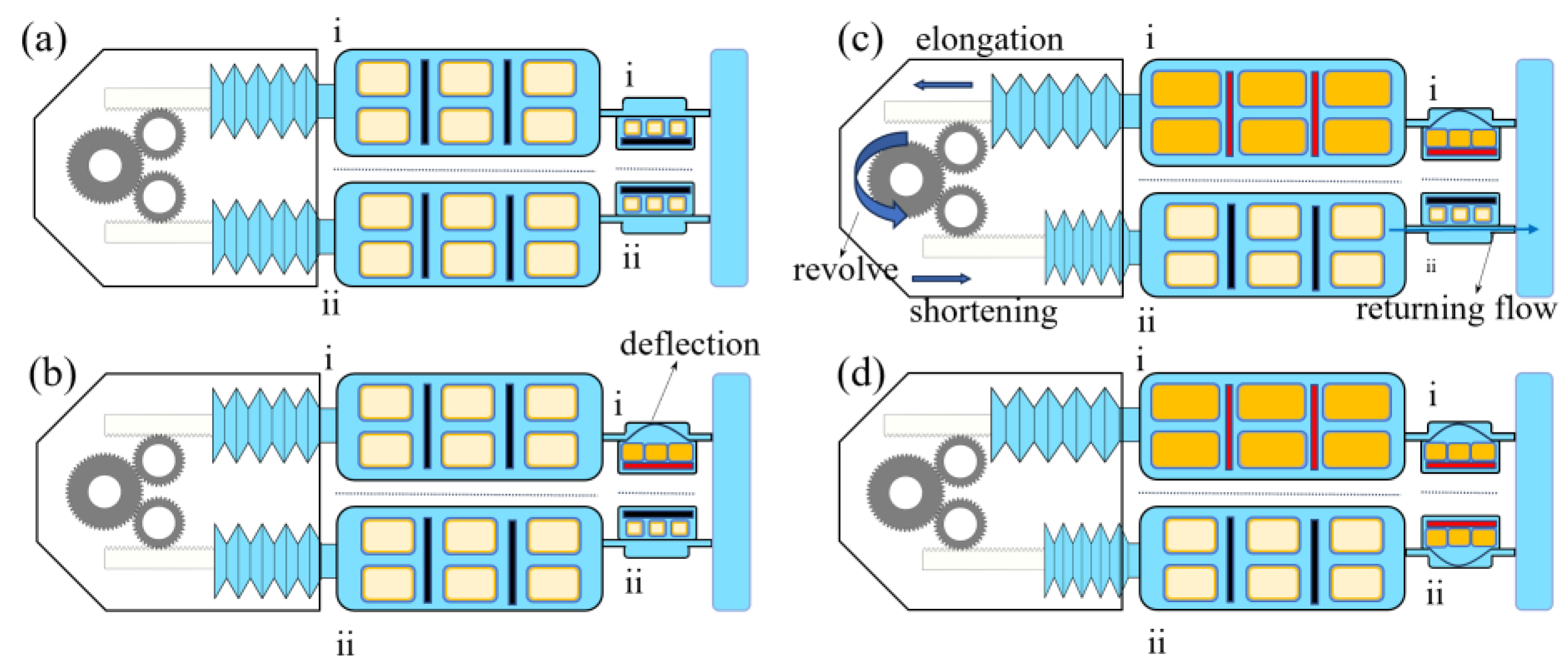
- Heat the flow valve i chamber to make the silicone membrane bulge and block the flow path, as shown in Figure 6b, thus interrupting the connection between the PCM storage unit i and the reflow unit.
- Maintain the heating of valve i while heating the phase change chamber i, causing the paraffin inside to undergo a phase change and generate volume increment, which flows into bellows i connected to PCM storage unit i. As a result, bellows i outputs a linear elongation, driving the gear and shaft to output rotational displacement. At the same time, due to the symmetrical coupling design between the gear and bellows, bellows ii is shortened due to the reverse displacement of the gear, resulting in a decrease in chamber volume. The liquid in bellows ii then flows into the reflow unit through PCM storage unit ii and flow valve ii, as shown in Figure 6c.
- When it is necessary to stop the joint rotation, stop heating the PCM storage unit i and heat valve i and ii to disconnect the internal liquid from reflow unit for stop the rotation of the joint, as shown in Figure 6d.
- To output reverse rotational displacement, based on the symmetrical design of this joint, follow steps 1 and 2 to sequentially heat the other side’s valve ii and PCM storage unit ii.
3. Results
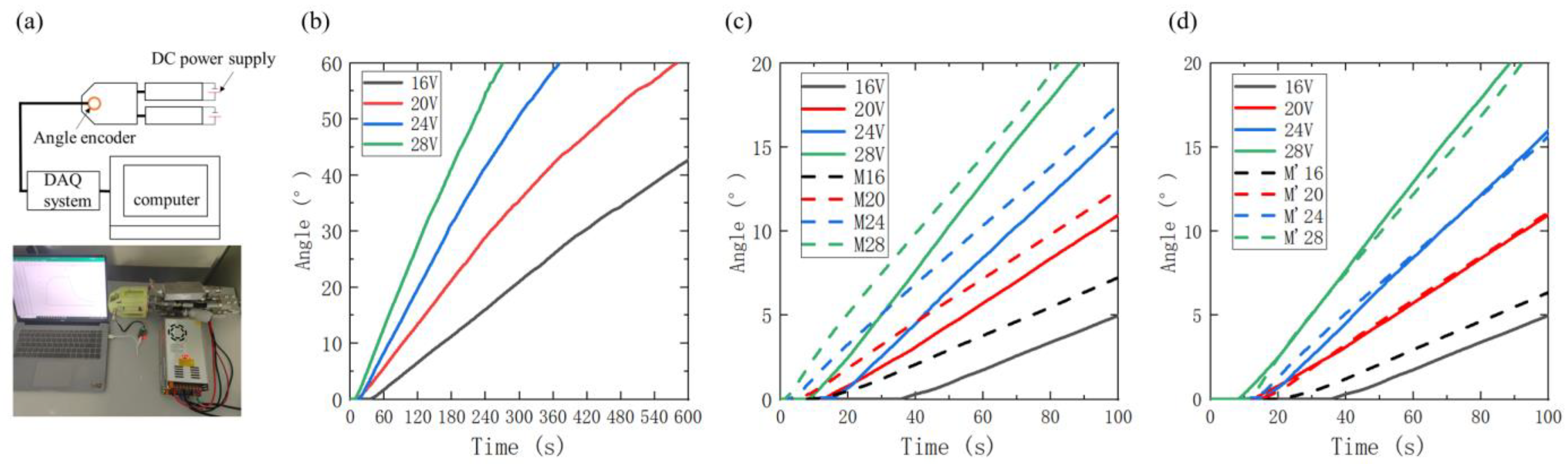
3.1. Driving Experiment with No-Load
3.1.1. Driving Experiment in Air with No Load
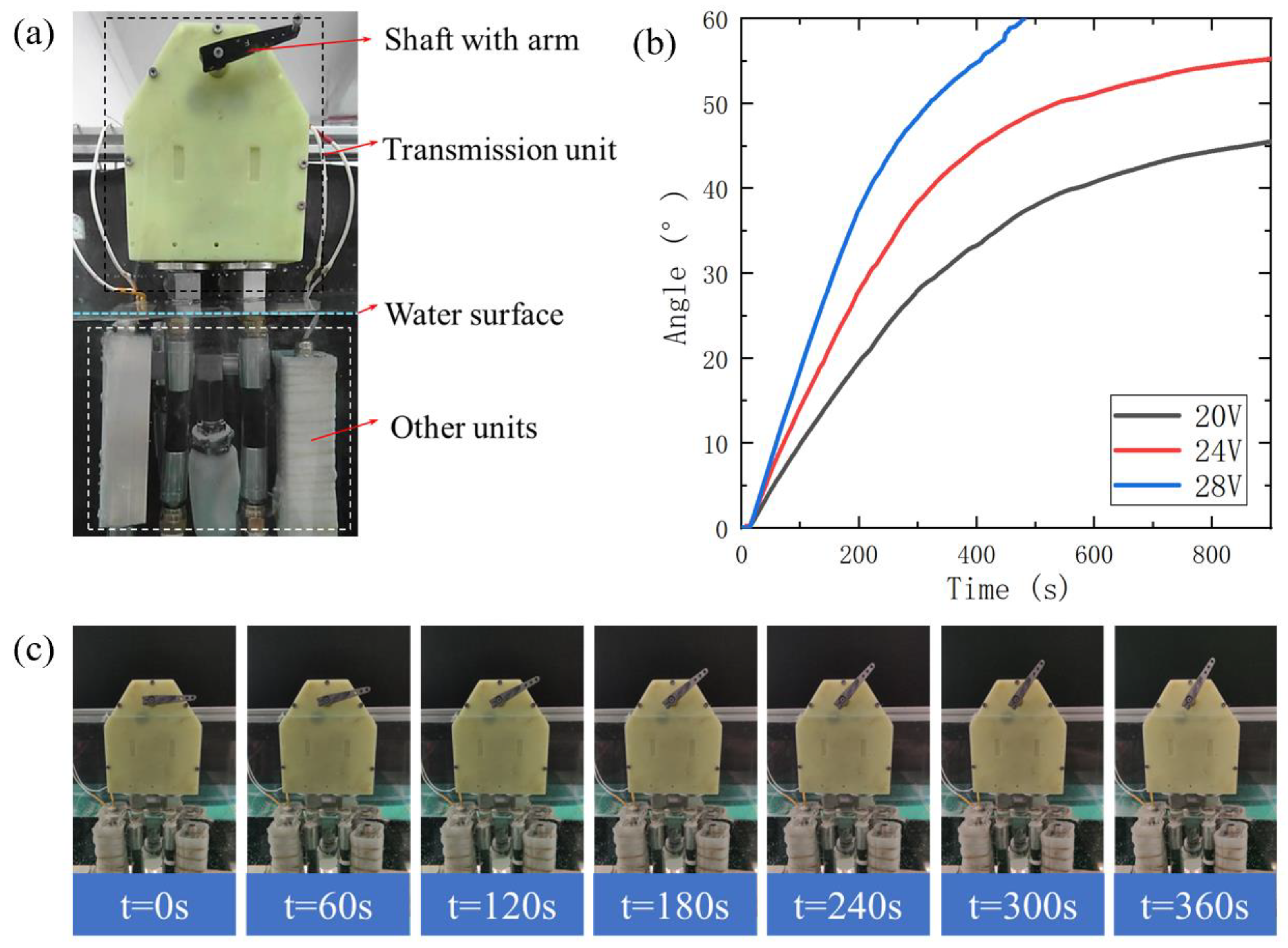
3.1.2. Driving Experiment Underwater with No Load
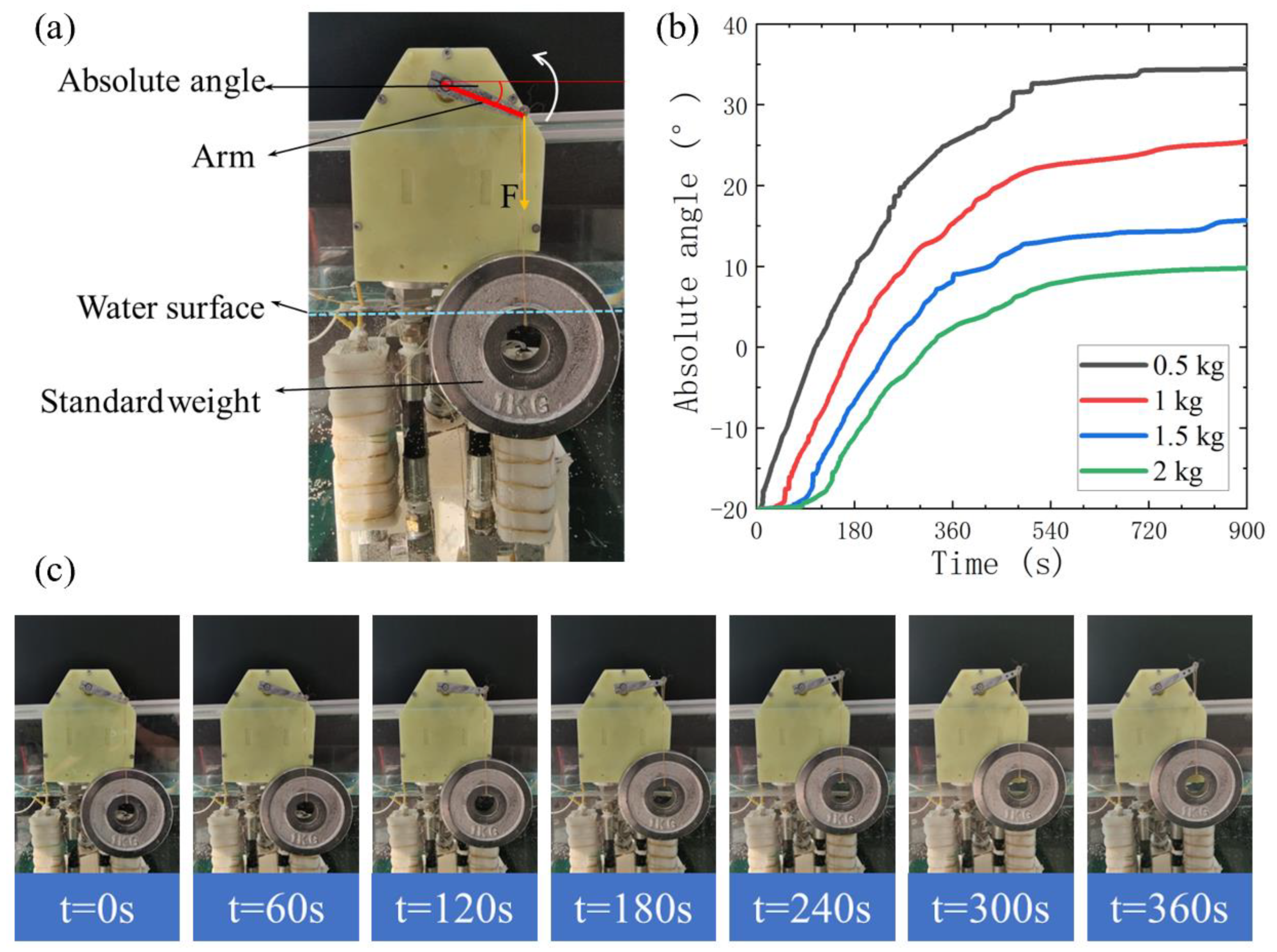
3.2. Driving Experiment Underwater with Different Loads
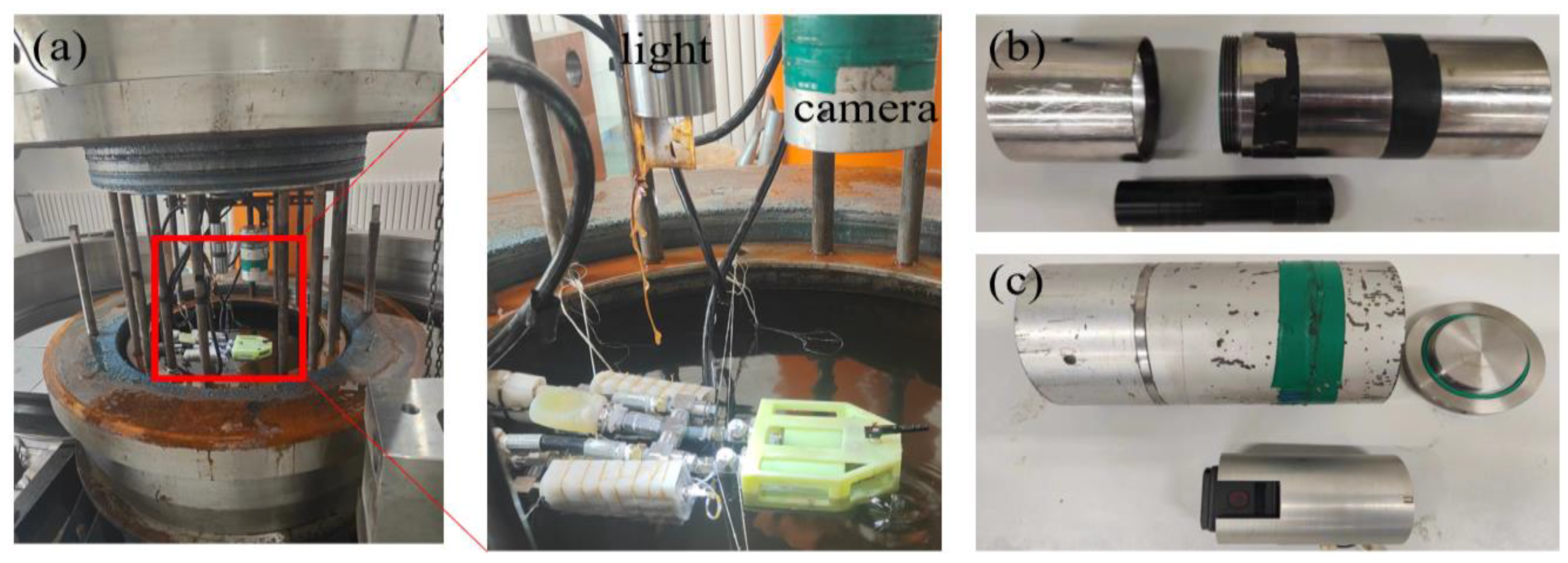
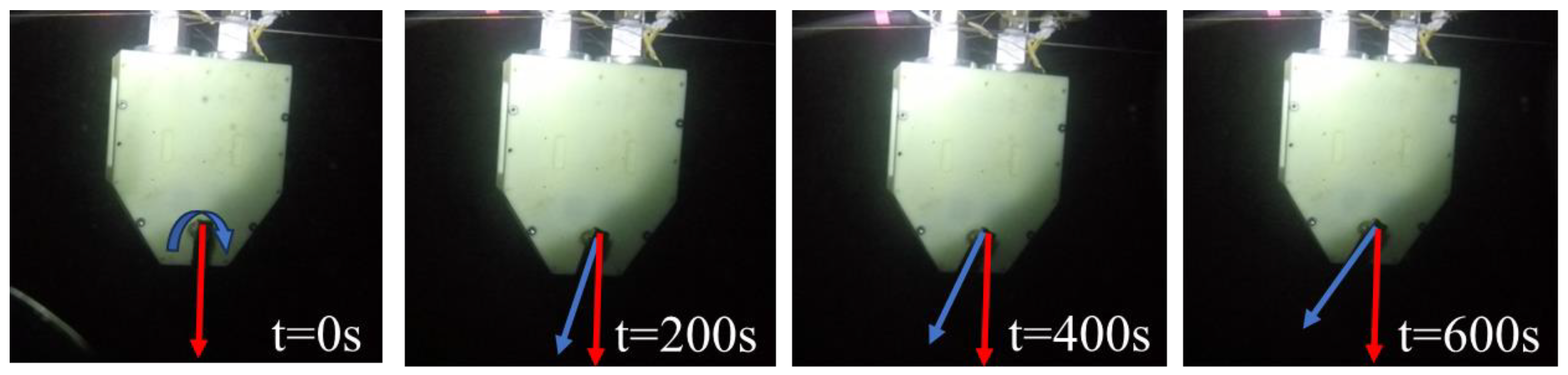
3.3. Drive Experiment in a Simulative Deep-Sea Environment
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Danovaro, R.; Fanelli, E.; Aguzzi, J.; Billett, D.; Carugati, L.; Corinaldesi, C.; Dell Anno, A.; Gjerde, K.; Jamieson, A.J.; Kark, S. Ecological variables for developing a global deep-ocean monitoring and conservation strategy. Nat. Ecol. Evol. 2020, 4, 181–192. [Google Scholar] [CrossRef] [PubMed]
- Proud, R.; Cox, M.J.; Brierley, A.S. Biogeography of the global ocean’s mesopelagic zone. Curr. Biol. 2017, 27, 113–119. [Google Scholar] [CrossRef] [PubMed]
- Reygondeau, G.; Guidi, L.; Beaugrand, G.; Henson, S.A.; Koubbi, P.; MacKenzie, B.R.; Sutton, T.T.; Fioroni, M.; Maury, O. Global biogeochemical provinces of the mesopelagic zone. J. Biogeogr. 2018, 45, 500–514. [Google Scholar] [CrossRef]
- Li, J.; Wang, P. Discovery of deep-water bamboo coral forest in the South China Sea. Sci. Rep. 2019, 9, 15453. [Google Scholar] [CrossRef] [PubMed]
- Yang, B.; Liu, Y.; Liao, J. Manned Submersibles—Deep-sea Scientific Research and Exploitation of Marine Resources. Bull. Chin. Acad. Sci. (Chin. Version) 2021, 36, 622–631. [Google Scholar]
- Hildebrandt, M.; Kerdels, J.; Albiez, J.; Kirchner, F. A Multi-Layered Controller Approach for High Precision End-Effector Control of Hydraulic Underwater Manipulator Systems. In Proceedings of the OCEANS 2009, Biloxi, MS, USA, 26–29 October 2009; pp. 1–5. [Google Scholar]
- Li, L.; Wu, J. Deformation and leakage mechanisms at hydraulic clearance fit in deep-sea extreme environment. Phys. Fluids 2020, 32, 067115. [Google Scholar] [CrossRef]
- Tian, Q.; Zhang, Q.; Chen, Y.; Huo, L.; Li, S.; Wang, C.; Bai, Y.; Du, L. Influence of Ambient Pressure on Performance of a Deep-Sea Hydraulic Manipulator. In Proceedings of the OCEANS 2019, Marseille, France, 17–20 June 2019; pp. 1–6. [Google Scholar]
- Singh Matharu, P.; Wang, Z.; Costello, J.H.; Colin, S.P.; Baughman, R.H.; Tadesse, Y.T. SoJel—A 3D printed jellyfish-like robot using soft materials for underwater applications. Ocean Eng. 2023, 279, 114427. [Google Scholar] [CrossRef]
- Li, G.; Chen, X.; Zhou, F.; Liang, Y.; Xiao, Y.; Cao, X.; Zhang, Z.; Zhang, M.; Wu, B.; Yin, S. Self-powered soft robot in the Mariana Trench. Nature 2021, 591, 66–71. [Google Scholar] [CrossRef] [PubMed]
- Li, K.; Zhou, X.; Liu, Y.; Sun, J.; Tian, X.; Zheng, H.; Zhang, L.; Deng, J.; Liu, J.; Chen, W. A 5 cm-Scale Piezoelectric Jetting Agile Underwater Robot. Adv. Intell. Syst. 2023, 5, 2200262. [Google Scholar] [CrossRef]
- Bu, K.; Gong, X.; Yu, C.; Xie, F. Biomimetic Aquatic Robots Based on Fluid-Driven Actuators: A Review. J. Mar. Sci. Eng. 2022, 10, 735. [Google Scholar] [CrossRef]
- Wilhelm, E.; Richter, C.; Rapp, B.E. Phase change materials in microactuators: Basics, applications and perspectives. Sens. Actuators A Phys. 2018, 271, 303–347. [Google Scholar] [CrossRef]
- Ogden, S.; Klintberg, L.; Thornell, G.; Hjort, K.; Bodén, R. Review on miniaturized paraffin phase change actuators, valves, and pumps. Microfluid. Nanofluid. 2014, 17, 53–71. [Google Scholar] [CrossRef]
- Lyu, F.; Li, M.; Guo, J.; Guo, S. A New Fabrication Method for Soft Pneumatic Actuators based on Paraffin. In Proceedings of the 2022 IEEE International Conference on Mechatronics and Automation (ICMA), Guilin, China, 7–10 August 2022; pp. 340–344. [Google Scholar]
- Svensson, S.; Sharma, G.; Ogden, S.; Hjort, K.; Klintberg, L. High-pressure peristaltic membrane micropump with temperature control. J. Microelectromech. Syst. 2010, 19, 1462–1469. [Google Scholar] [CrossRef]
- Liu, B.; Yang, J.; Yang, J.; Li, D.; Gao, G.; Wang, Y. A thermally actuated microvalve using paraffin composite by induction heating. A thermally actuated microvalve using paraffin composite by induction heating. Microsyst. Technol. 2019, 25, 3969–3975. [Google Scholar] [CrossRef]
- Hou, J.; Zou, W.; Li, Z.; Gong, Y.; Burnashev, V.; Ning, D. Development and experiments of an electrothermal driven deep-sea buoyancy control module. Micromachines 2020, 11, 1017. [Google Scholar] [CrossRef] [PubMed]
- Ning, D.; Li, Z.; Liang, G.; Wang, Q.; Zou, W.; Gong, Y.; Hou, J. Design and Performance Study for Electrothermally Deep-Sea Drive Microunits Using a Paraffin Phase Change Material. Micromachines 2021, 12, 415. [Google Scholar] [CrossRef] [PubMed]
- Wołoszyn, J.; Szopa, K.; Czerwiński, G. Enhanced heat transfer in a PCM shell-and-tube thermal energy storage system. Appl. Therm. Eng. 2021, 196, 117332. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Properties | Dimensions | Value |
|---|---|---|
| Density of solid paraffin ( | Kg/m3 | 900 |
| Density of liquid paraffin () | Kg/m3 | 773 |
| Thermal conductivity of Solid paraffin () | W/(m·K) | 0.28 |
| Thermal conductivity of Liquid paraffin () | W/(m·K) | 0.14 |
| Constant pressure heat capacity () | J/(kg·K) | 2200 |
| Dynamic viscosity of liquid paraffin () | Pa·s | 0.003 |
| Coefficient of cubical expansion () | 1/K | 0.0015 |
| Solid phase temperature line () | K | 331.15 |
| Solid phase temperature line () | K | 337.15 |
| Latent heat () | kJ/kg | 250.6 |
| Module | Part Name | Materials | Fabrication |
|---|---|---|---|
| PCM storage unit | PCM units | paraffin+ silicone rubber | glue seal |
| PCM storage unit | heaters | PTC ceramic heaters | - |
| PCM storage unit | liquid medium | C2H4(OH)2 | - |
| transmission unit | gears and racks | brass | - |
| transmission unit | supporting shell | resinous | 3D printing |
| transmission unit | gear shaft | stainless steels | turning |
| transmission unit | bellows | rubber | - |
| valve unit | valve body | aluminum alloy | NC machining |
| valve unit | membrane | silicone rubber | demolding |
| reflow unit | flexible chamber | silicone rubber | demolding |
| Properties | Dimensions | Value |
|---|---|---|
| total volume of the paraffin () | cm3 | 45.78 |
| thermal expansion rate () | - | 0.17 |
| number of round tables () | - | 7 |
| diameter of the trough of the bellows () | cm | 2.27 |
| waist length of the trapezoid of the circular table () | cm | 0.77 |
| Initial height of a single round table () | cm | 0.17 |
| Equipment | Model Number |
|---|---|
| Angular encoder | JY61P |
| Data acquisition | STM32 |
| Data processing | Matlab |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ning, D.; He, X.; Hou, J.; Liang, G.; Zhang, K. Lightweight Robotic Joint with Thermally Activated Paraffin Actuator in the Deep Sea. J. Mar. Sci. Eng. 2023, 11, 2253. https://doi.org/10.3390/jmse11122253
Ning D, He X, Hou J, Liang G, Zhang K. Lightweight Robotic Joint with Thermally Activated Paraffin Actuator in the Deep Sea. Journal of Marine Science and Engineering. 2023; 11(12):2253. https://doi.org/10.3390/jmse11122253
Chicago/Turabian StyleNing, Dayong, Xiaokang He, Jiaoyi Hou, Gangda Liang, and Kang Zhang. 2023. "Lightweight Robotic Joint with Thermally Activated Paraffin Actuator in the Deep Sea" Journal of Marine Science and Engineering 11, no. 12: 2253. https://doi.org/10.3390/jmse11122253