
Underwater Single-Image Restoration with Transmission Estimation Using Color Constancy


Abstract
:1. Introduction
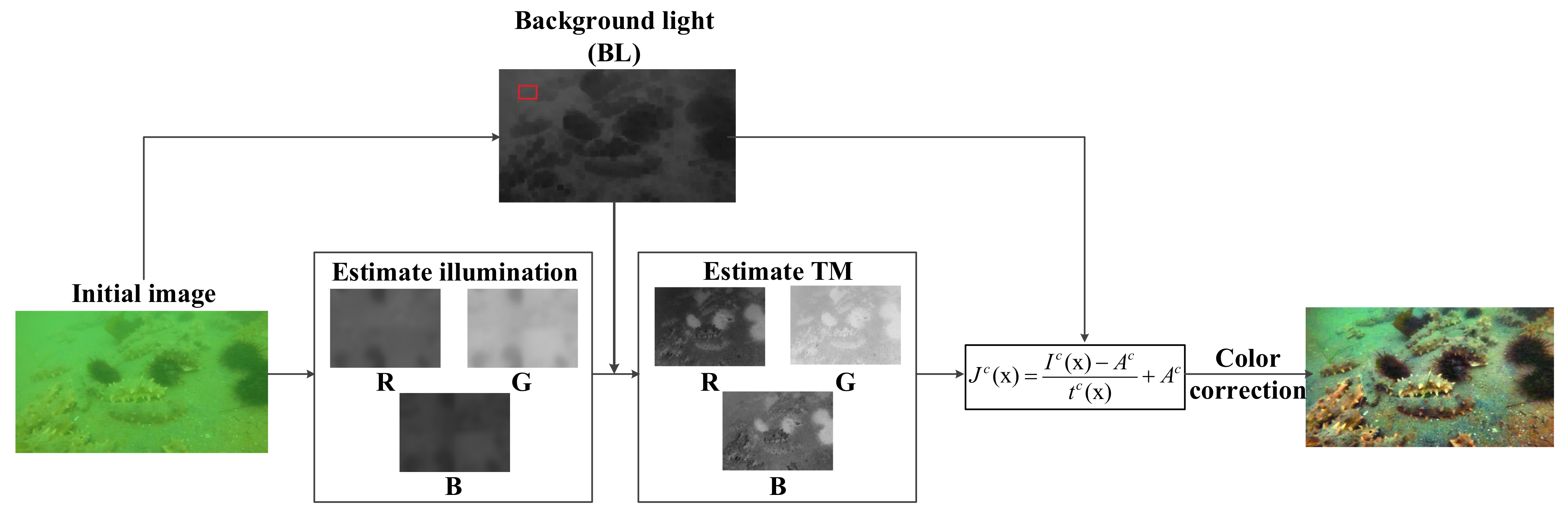
- A single-image underwater restoration method based on color constancy is proposed in this paper, which uses the illumination component of the initial image to estimate the TM;
- Rather than estimating the transmission map directly using DCP-based methods, the proposed underwater image restoration method can obtain the refined TM without by performing guided filtering or soft matting, which improves the real-time performance of the algorithm;
- Compared with other state-of-the-art underwater image restoration methods, the proposed method can achieve a good performance on dehazing and evaluation metrics and real-time performance.
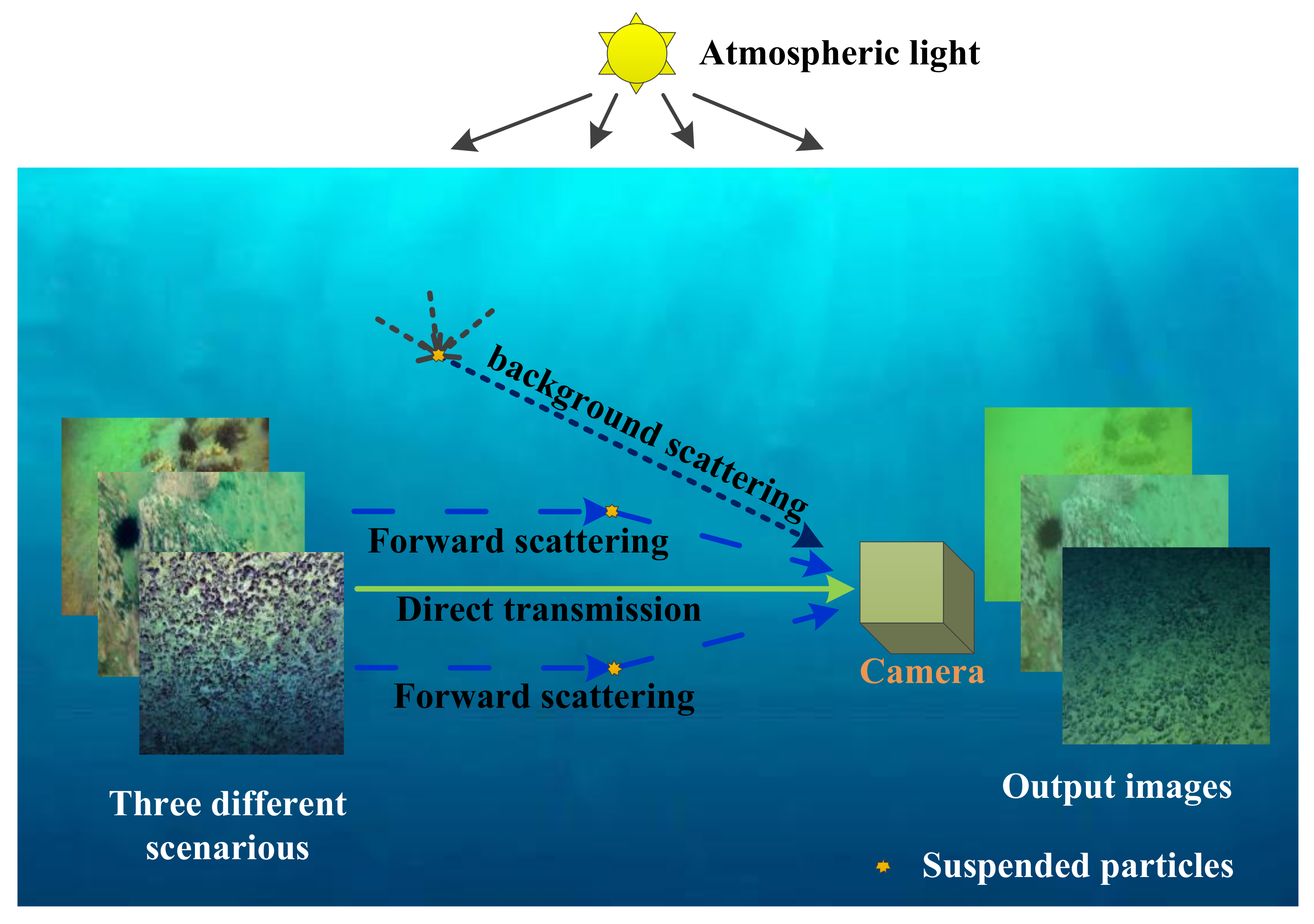
2. Background and Related Work
3. The Color-Constancy-Based Underwater Image Restoration Method
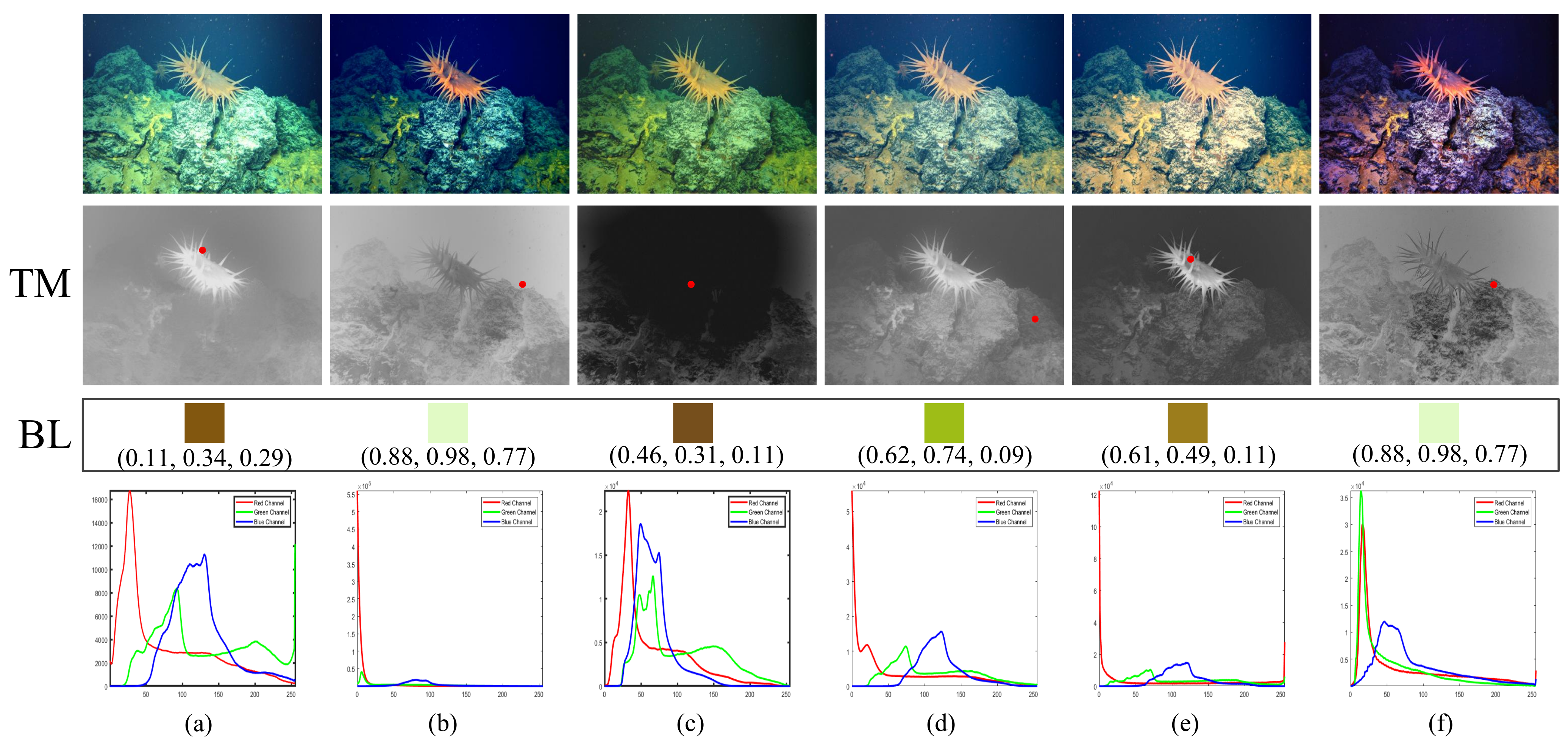
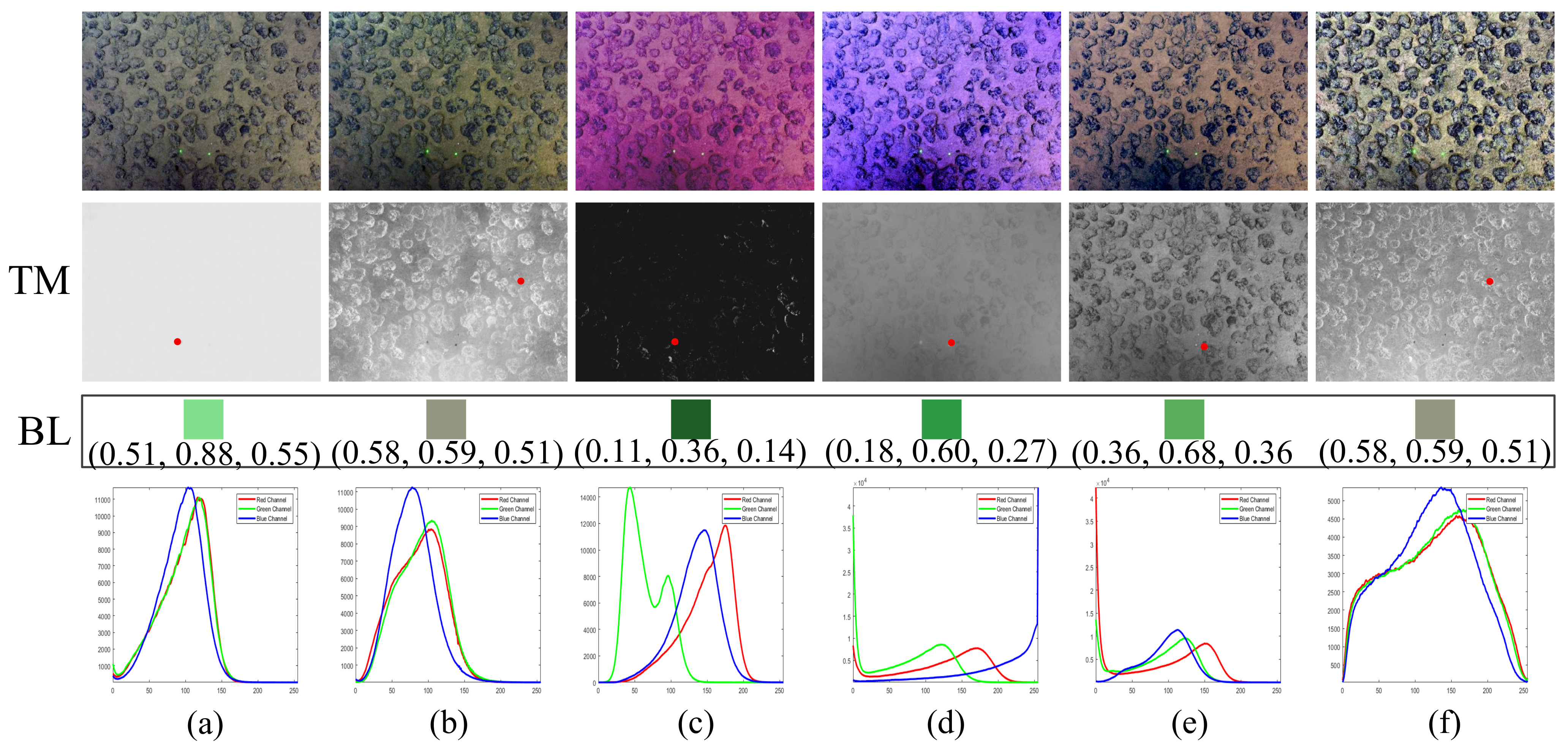
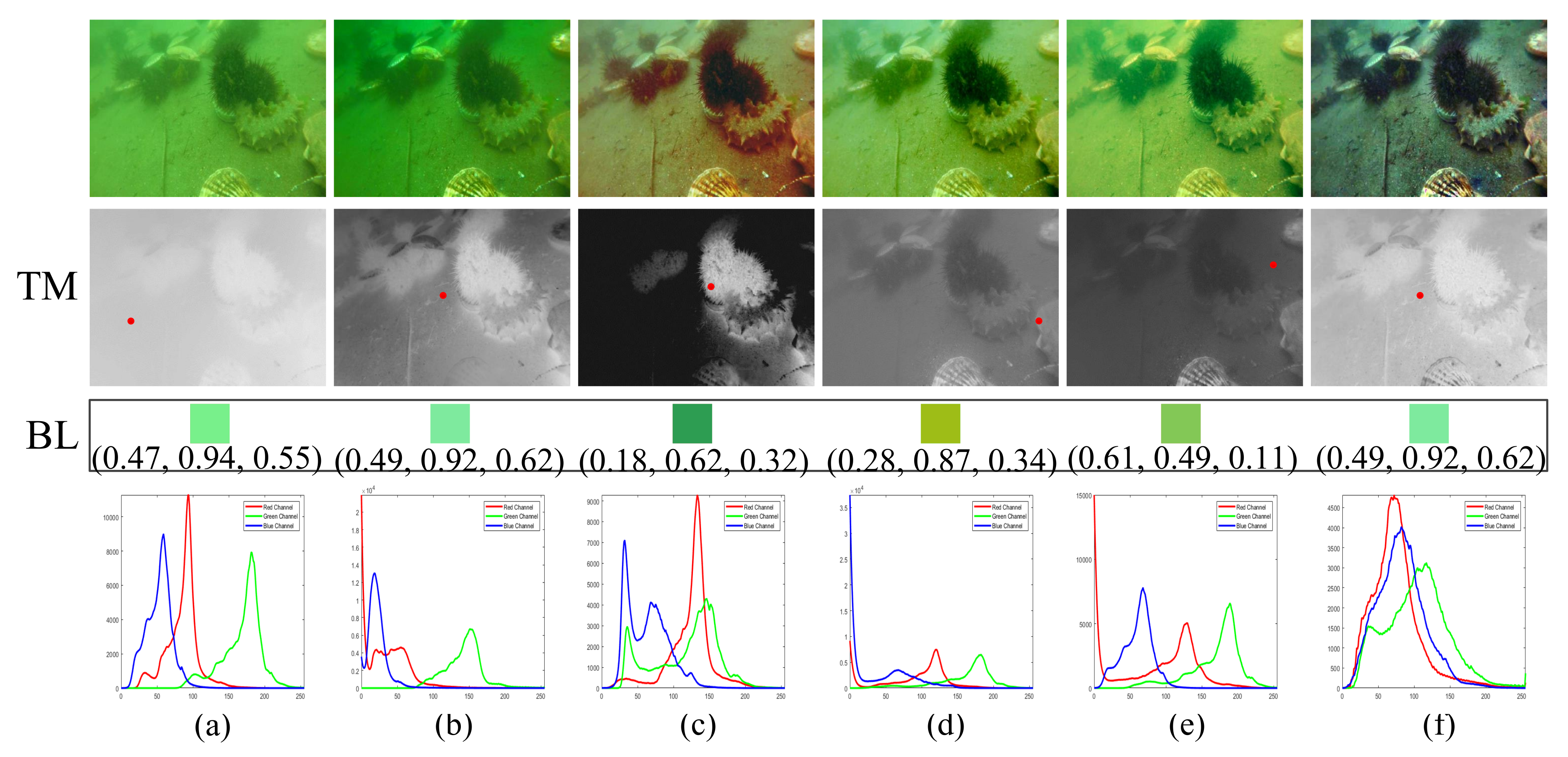
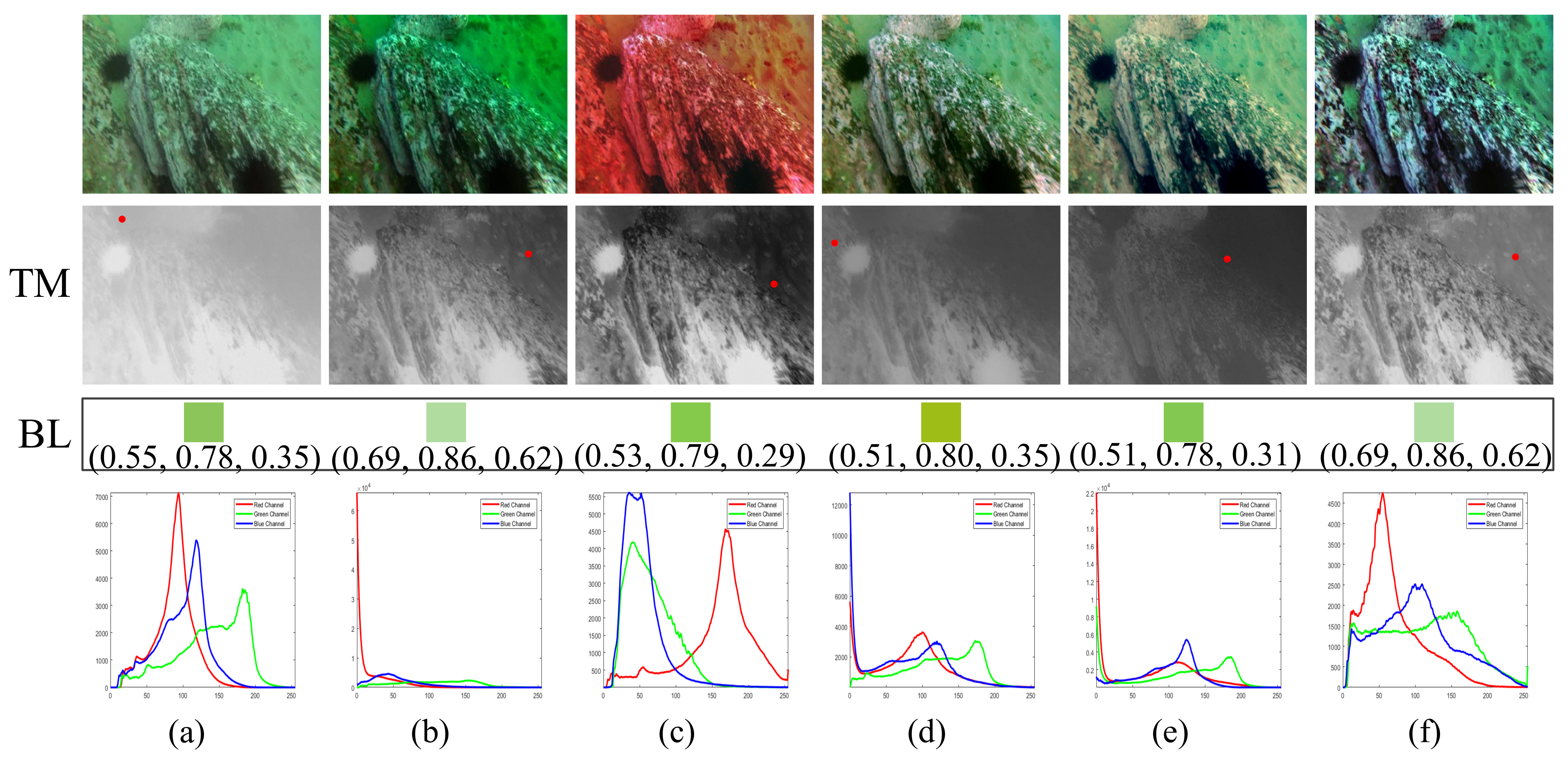
3.1. The Spatial Distribution of the Source Illumination Based on Color Constancy
3.2. TM Estimation with the Illumination Spatial Distribution Color Constancy
3.3. Color Correction
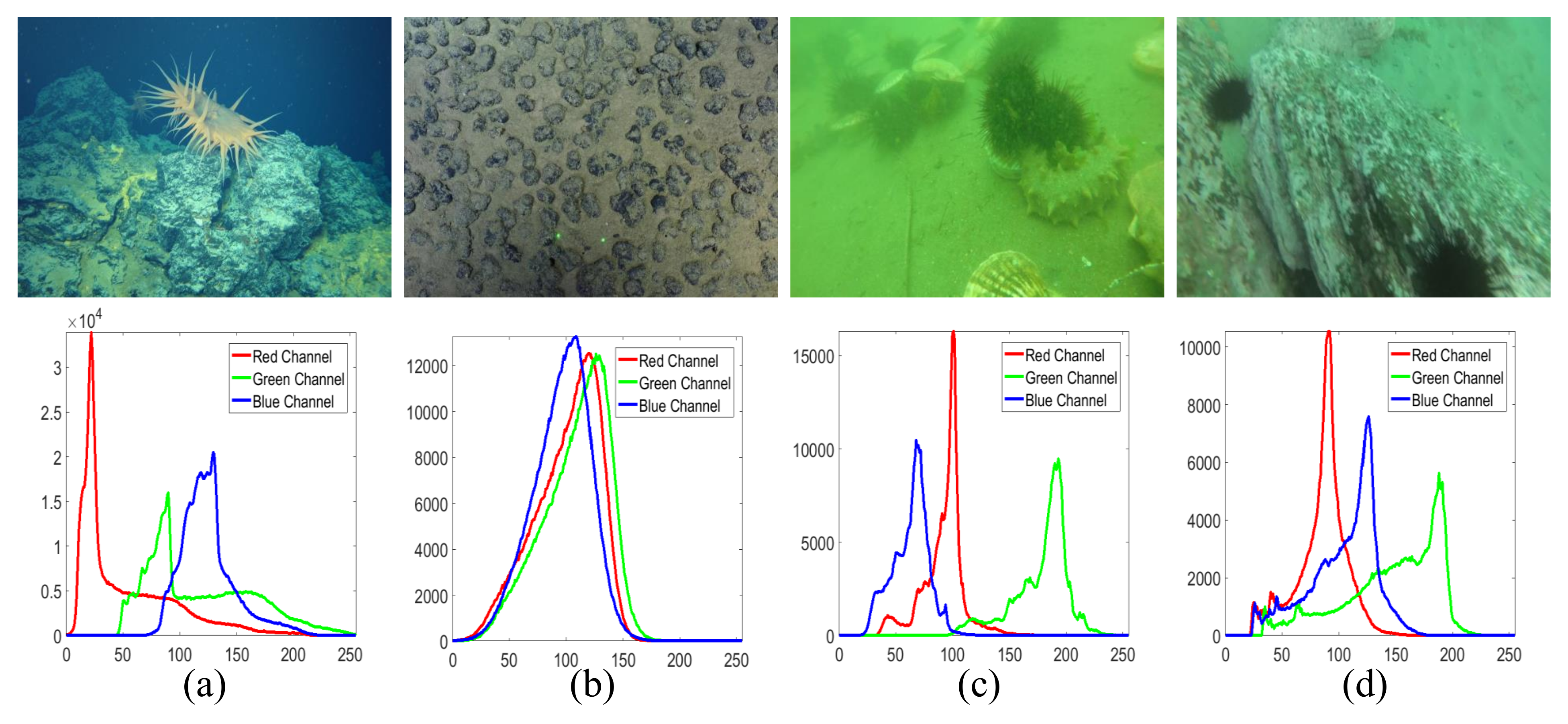
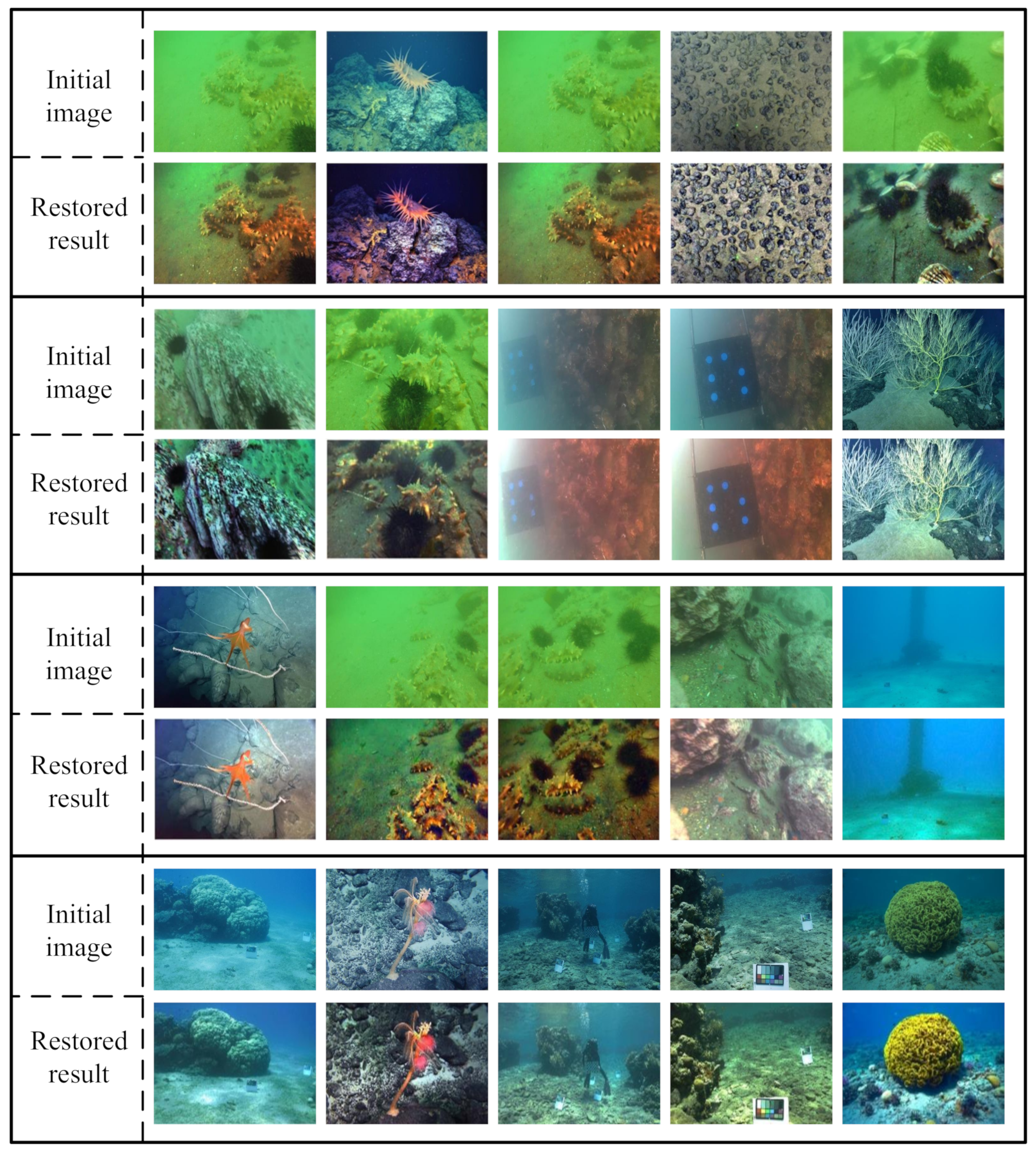
4. Experimental Results
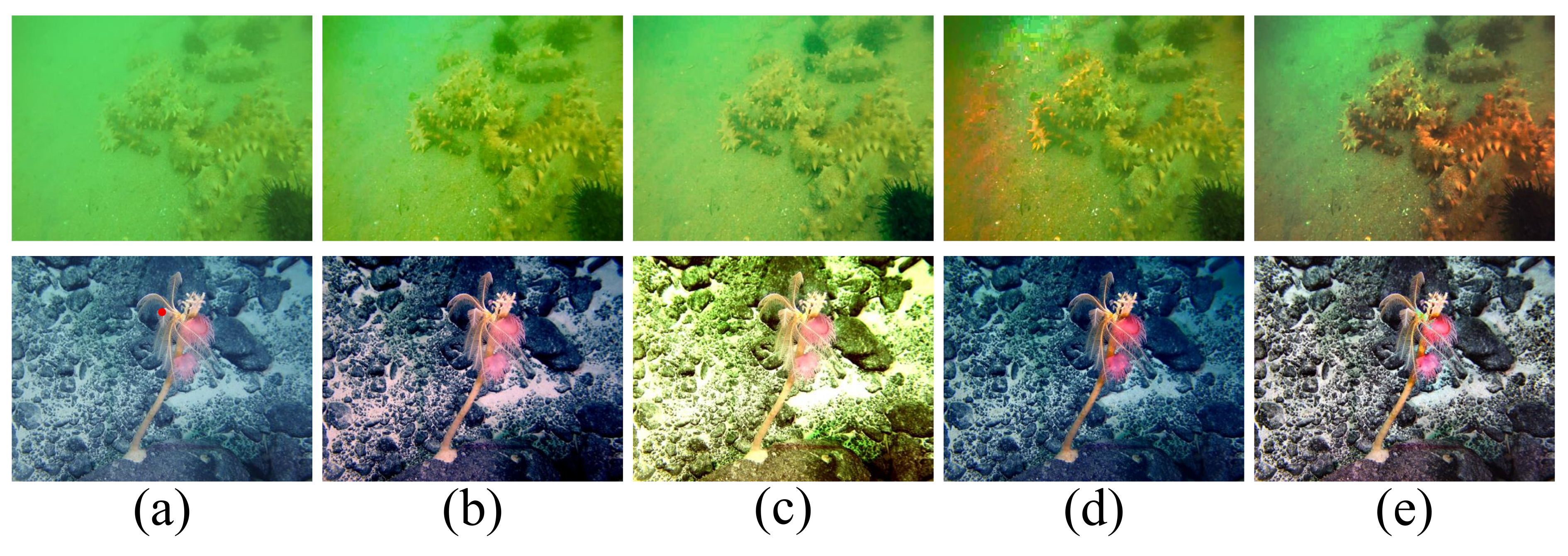
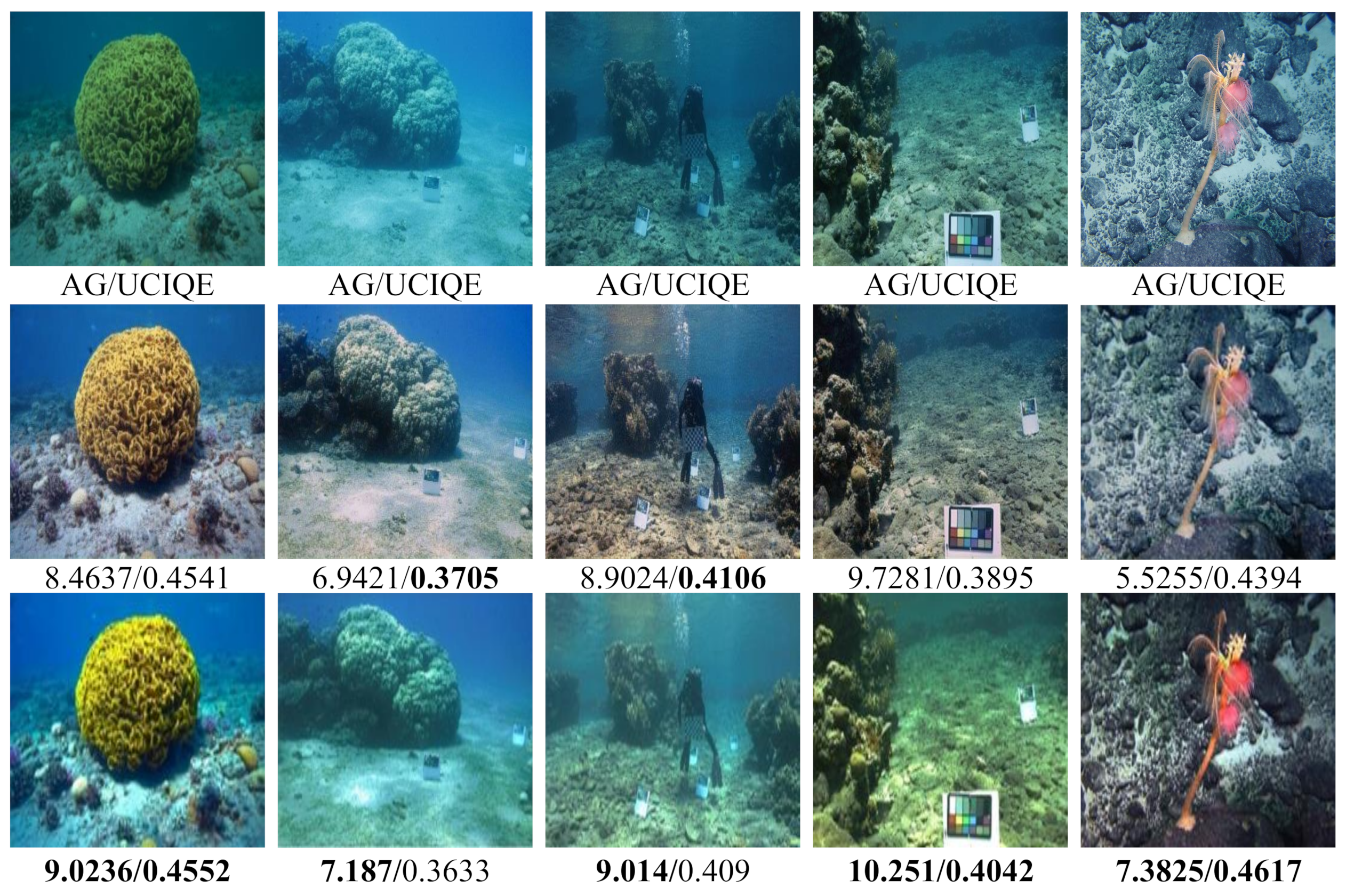
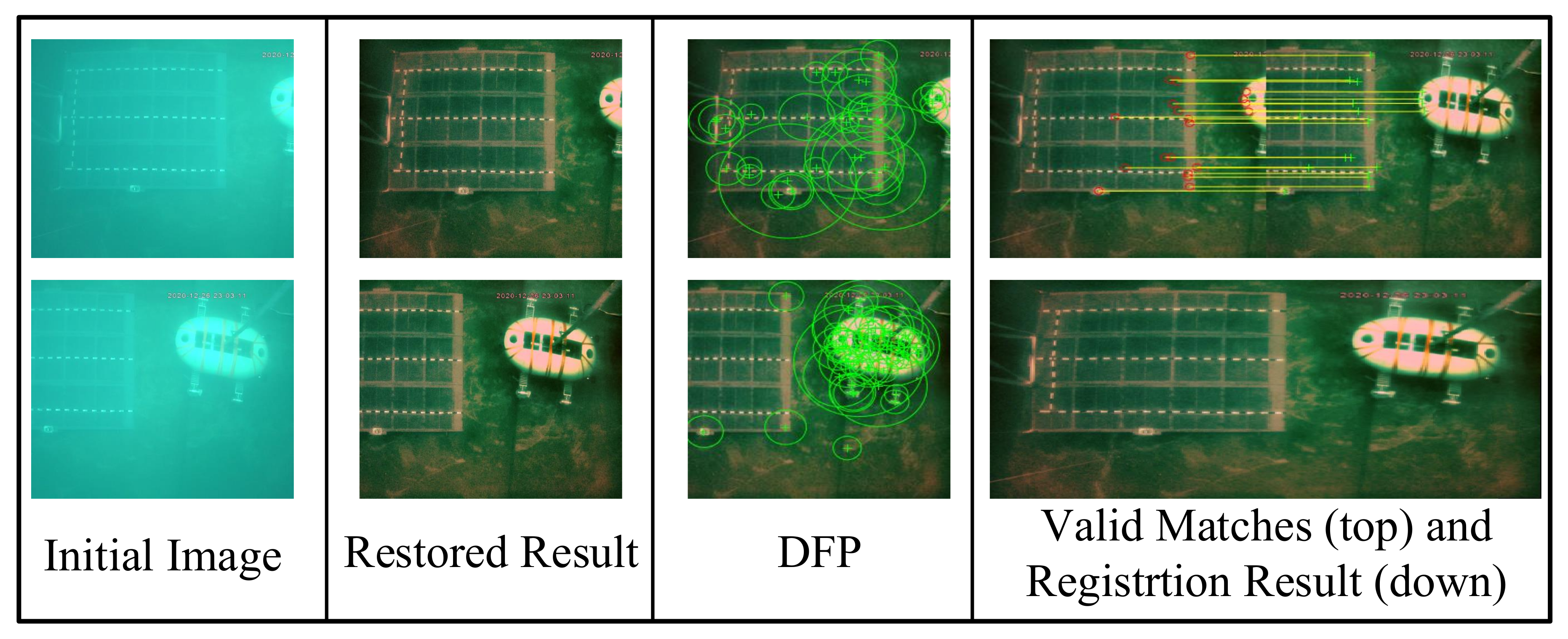
4.1. Qualitative Comparison
4.2. Quantitative Comparison
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lu, H.; Wang, D.; Li, Y.; Li, J. CONet: A Cognitive Ocean Network. IEEE Wirel. Commun. 2019, 26, 90–96. [Google Scholar]
- Inoue, Y.; Hisano, D.; Maruta, K.; Hara-Azumi, Y.; Nakayama, Y. Deep Joint Source-Channel Coding and Modulation for Underwater Acoustic Communication. In Proceedings of the 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 7–11 December 2021; pp. 1–7. [Google Scholar]
- Al-Zhrani, S.; Bedaiwi, N.M.; El-Ramli, I.; Barasheed, A. Underwater Optical Communications: A Brief Overview and Recent Developments. Eng. Sci. 2021, 16, 146–186. [Google Scholar]
- Esmaiel, H.; Qasem, Z.A.H.; Sun, H.; Wang, J.; Junejo, N.U.R. Underwater image transmission using spatial modulation unequal error protection for internet of underwater things. Sensors 2019, 19, 5271. [Google Scholar]
- Esmaiel, H.; Jiang, D. SPIHT coded image transmission over underwater acoustic channel with unequal error protection using HQAM. In Proceedings of the 2013 IEEE Third International Conference on Information Science and Technology (ICIST), Yangzhou, China, 23–25 March 2013; pp. 1365–1371. [Google Scholar]
- Esmaiel, H.; Jiang, D. Progressive ZP-OFDM for Image Transmission Over Underwater Time-Dispersive Fading Channels. In Proceedings of the 2018 International Conference on Computing, Electronics and Communications Engineering (iCCECE), Southend, UK, 16–17 August 2018; pp. 226–229. [Google Scholar]
- Farhad, G.; Aria, A.; Hassan, S.; Hashemi, M.; Shahbazi, M. Model identification of a Marine robot in presence of IMU-DVL misalignment using TUKF. Ocean Eng. 2020, 206, 107344. [Google Scholar]
- Mousavian, S.H.; Koofigar, H.R. Identification-Based Robust Motion Control of an AUV: Optimized by Particle Swarm Optimization Algorithm. J. Intell. Robot. Syst. 2017, 85, 331–352. [Google Scholar]
- Chen, W.; Gu, K.; Lin, W.; Yuan, F.; Cheng, E. Statistical and Structural Information Backed Full-Reference Quality Measure of Compressed Sonar Images. IEEE Trans. Circuits Syst. Video Technol. 2020, 30, 334–348. [Google Scholar]
- Lu, H.; Uemura, T.; Wang, D.; Zhu, J.; Huang, Z.; Kim, H. Deep-Sea Organisms Tracking Using Dehazing and Deep Learning. Mob. Netw. Appl. 2018, 6, 1008–1015. [Google Scholar]
- Chen, L.; Zhou, J.; Zhao, W. A Real-Time Vehicle Navigation Algorithm in Sensor Network Environments. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1657–1666. [Google Scholar]
- Qin, H.; Yu, X.; Zhu, Z.; Deng, Z. An Expectation-Maximization Based Single-Beacon Underwater Navigation Method with Unknown ESV. Neurocomputing 2020, 378, 295–303. [Google Scholar]
- Hou, G.; Pan, Z.; Wang, G.; Yang, H.; Duan, J. An efficient nonlocal variational method with application to underwater image restoration. Neurocomputing 2019, 369, 106–121. [Google Scholar]
- He, K.; Sun, J.; Tang, X. Single Image Haze Removal Using Dark Channel Prior. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 2341–2353. [Google Scholar] [PubMed]
- Chao, L.; Wang, M. Removal of water scattering. In Proceedings of the 2010 2nd International Conference on Computer Engineering and Technology, Chengdu, China, 16–18 April 2010; pp. 35–39. [Google Scholar]
- Paulo, D., Jr.; Nascimento, E.; Moraes, F.; Botelho, S.; Campos, M. Transmission Estimation in Underwater Single Images. In Proceedings of the IEEE International Conference on Computer Vision (ICCV) Workshops, Sydney, Australia, 2–3 December 2013; pp. 825–830. [Google Scholar]
- Galdran, A.; Pardo, D.; Picón, A.; Alvarez-Gila, A. Automatic Red-Channel underwater image restoration. J. Vis. Commun. Image Represent. 2015, 26, 132–145. [Google Scholar]
- Peng, Y.; Cao, K.; Cosman, P.C. Generalization of the Dark Channel Prior for Single Image Restoration. IEEE Trans. Image Process. 2018, 27, 2856–2868. [Google Scholar] [PubMed]
- Hou, G.; Li, J.; Wang, G.; Yang, H.; Huang, B.; Pan, Z. A novel dark channel prior guided variational framework for underwater image restoration. J. Vis. Commun. Image Represent. 2020, 66, 102732. [Google Scholar]
- He, K.; Sun, J.; Tang, X. Guided Image Filtering. J. Vis. Commun. Image Represent. 2013, 35, 1397–1409. [Google Scholar]
- Levin, A.; Lischinski, D.; Weiss, Y. A Closed-Form Solution to Natural Image Matting. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 30, 228–242. [Google Scholar]
- Mcglamery, B.L. A Computer Model For Underwater Camera Systems. Proc. Spie 1980, 208, 1–10. [Google Scholar]
- Jaffee, J.S. Computer modeling and the design of optimal underwater imaging systems. Ocean. Eng. 1990, 15, 101–111. [Google Scholar]
- Zhang, M.; Peng, J. Underwater Image Restoration Based on A New Underwater Image Formation Model. IEEE Access 2018, 6, 58634–58644. [Google Scholar]
- Wang, N.; Qi, L.; Dong, J.; Fan, H.; Chen, X.; Yu, H. Two-Stage Underwater Image Restoration Based on a Physical Model. In Proceedings of the Eighth International Conference on Graphic and Image Processing (ICGIP), Tokyo, Japan, 29–31 October 2016; pp. 10–16. [Google Scholar]
- Peng, Y.T.; Zhao, X.; Cosman, P.C. Single underwater image enhancement using depth estimation based on blurriness. In Proceedings of the 2015 IEEE International Conference on Image Processing (ICIP), Quebec City, QC, Canada, 27–30 September 2015; pp. 4952–4956. [Google Scholar]
- Wang, Y.; Song, W.; Fortino, G.; Qi, L.; Zhang, W.; Liotta, A. An Experimental-Based Review of Image Enhancement and Image Restoration Methods for Underwater Imaging. IEEE Access 2019, 76, 140233–140251. [Google Scholar]
- Nicholas, C.B.; Anush, M.; Eustice, R.M. Initial Results in Underwater Single Image Dehazing. In Proceedings of the OCEANS 2010 MTS/IEEE Seattle, Seattle, WA, USA, 20–23 September 2010; pp. 1–8. [Google Scholar]
- Peng, Y.T.; Cosman, P.C. Underwater Image Restoration Based on Image Blurriness and Light Absorption. IEEE Trans. Image Process. 2017, 26, 1579–1594. [Google Scholar] [PubMed]
- Song, W.; Wang, Y.; Huang, D.; Tjondronegoro, D. A rapid scene depth estimation model based on underwater light attenuation prior for underwater image restoration. Adv. Multimed. Inf. Process. 2018, 6, 678–688. [Google Scholar]
- Rahman, Z.U.; Woodell, G.A. Multi-scale retinex for color image enhancement. In Proceedings of the 3rd IEEE International Conference on Image Processing, Lausanne, Switzerland, 19 September 1996; pp. 1003–1006. [Google Scholar]
- Li, C.; Quo, J.; Pang, Y.; Chen, S.; Wang, J. Single underwater image restoration by blue-green channels dehazing and red channel correction. In Proceedings of the 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016; pp. 1731–1735. [Google Scholar]
- Li, C.; Guo, C.; Ren, W.; Cong, R.; Hou, J.; Kwong, S.; Tao, D. An Underwater Image Enhancement Benchmark Dataset and Beyond. IEEE Trans. Image Process. 2020, 29, 4376–4389. [Google Scholar]
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Initial Images | MIP [28] | UDCP [16] | Li’s Method [32] | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| AG | Entropy | Contrast | UCIQE | AG | Entropy | Contrast | UCIQE | AG | Entropy | Contrast | UCIQE | |
| 7.8452 | 16.3016 | 50.9766 | 0.4197 | 6.4357 | 14.1648 | 31.9105 | 0.5167 | 5.6237 | 15.1937 | 36.1423 | 0.4171 | |
| 8.4506 | 13.9274 | 23.8966 | 0.3196 | 8.8771 | 15.7372 | 24.3995 | 0.3073 | 8.0575 | 15.5760 | 22.0549 | 0.3406 | |
| 1.7832 | 12.6811 | 16.4860 | 0.3450 | 1.8808 | 14.4660 | 12.6179 | 0.4129 | 2.8828 | 14.6900 | 27.8984 | 0.3909 | |
| 4.0887 | 14.6109 | 28.5579 | 0.3334 | 4.7030 | 15.8857 | 25.0513 | 0.4542 | 4.9687 | 15.2902 | 24.0916 | 0.5078 | |
| Average | 5.5419 | 14.3802 | 19.9792 | 0.3544 | 5.4742 | 15.0634 | 23.4948 | 0.4228 | 5.3832 | 15.1875 | 27.5468 | 0.4141 |
| Initial Images | IBLA [29] | ULAP [30] | The Proposed Method | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| AG | Entropy | Contrast | UCIQE | AG | Entropy | Contrast | UCIQE | AG | Entropy | Contrast | UCIQE | |
| 6.6599 | 15.7478 | 44.1143 | 0.4152 | 8.4623 | 15.8384 | 56.6435 | 0.4617 | 9.7705 | 16.7100 | 37.4011 | 0.5085 | |
| 13.0467 | 16.0884 | 36.0871 | 0.4281 | 11.2939 | 14.9631 | 34.5920 | 0.4436 | 20.6358 | 17.7885 | 49.8168 | 0.4172 | |
| 2.7248 | 14.3524 | 26.4115 | 0.4224 | 2.7956 | 14.2086 | 26.8171 | 0.4018 | 4.6639 | 16.1528 | 26.7410 | 0.3879 | |
| 6.1937 | 15.9053 | 37.2614 | 0.3972 | 6.1703 | 15.6731 | 39.9646 | 0.4031 | 8.5353 | 16.8028 | 39.7184 | 0.4331 | |
| Average | 7.1563 | 15.5235 | 35.9686 | 0.4157 | 7.1805 | 15.1708 | 39.5043 | 0.4276 | 10.9014 | 16.8635 | 38.4193 | 0.4367 |
| Methods | MIP [28] | UDCP [16] | Li’s Method [32] | IBLA [29] | ULAP [30] | The Proposed Method |
|---|---|---|---|---|---|---|
| Processing time(s) | 13.2412 | 17.5264 | 21.3852 | 43.0186 | 4.3546 | 4.1124 |
| Standard Deviation | 0.2152 | 0.3354 | 0.2541 | 0.2285 | 0.2737 | 0.2017 |
| Methods | MIP [28] | UDCP [16] | Li’s Method [32] | IBLA [29] | ULAP [30] | The Proposed Method |
|---|---|---|---|---|---|---|
| AG | 6.3825 | 6.1311 | 5.0623 | 9.2365 | 9.4357 | 11.9822 |
| Entropy | 13.7691 | 15.4799 | 15.3824 | 16.0378 | 15.9395 | 16.3776 |
| Contrast | 37.4366 | 21.1347 | 26.1455 | 39.4728 | 42.1598 | 41.7541 |
| UCIQE | 0.3123 | 0.3977 | 0.4035 | 0.4157 | 0.4266 | 0.4314 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Liu, W.; Li, L. Underwater Single-Image Restoration with Transmission Estimation Using Color Constancy. J. Mar. Sci. Eng. 2022, 10, 430. https://doi.org/10.3390/jmse10030430
Zhang W, Liu W, Li L. Underwater Single-Image Restoration with Transmission Estimation Using Color Constancy. Journal of Marine Science and Engineering. 2022; 10(3):430. https://doi.org/10.3390/jmse10030430
Chicago/Turabian StyleZhang, Wenbo, Weidong Liu, and Le Li. 2022. "Underwater Single-Image Restoration with Transmission Estimation Using Color Constancy" Journal of Marine Science and Engineering 10, no. 3: 430. https://doi.org/10.3390/jmse10030430