
Ship Steering Adaptive CGS Control Based on EKF Identification Method




Abstract
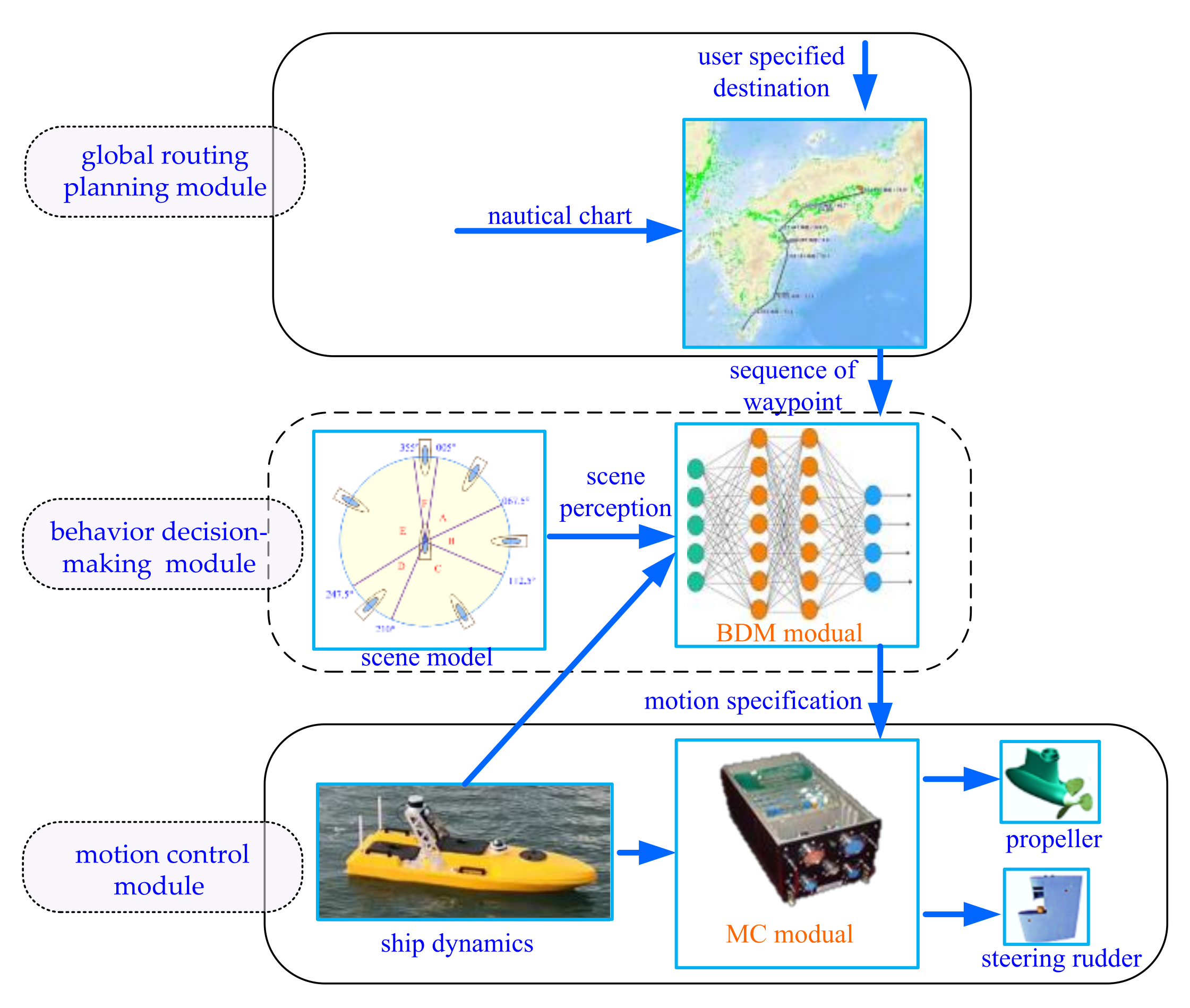
:1. Introduction
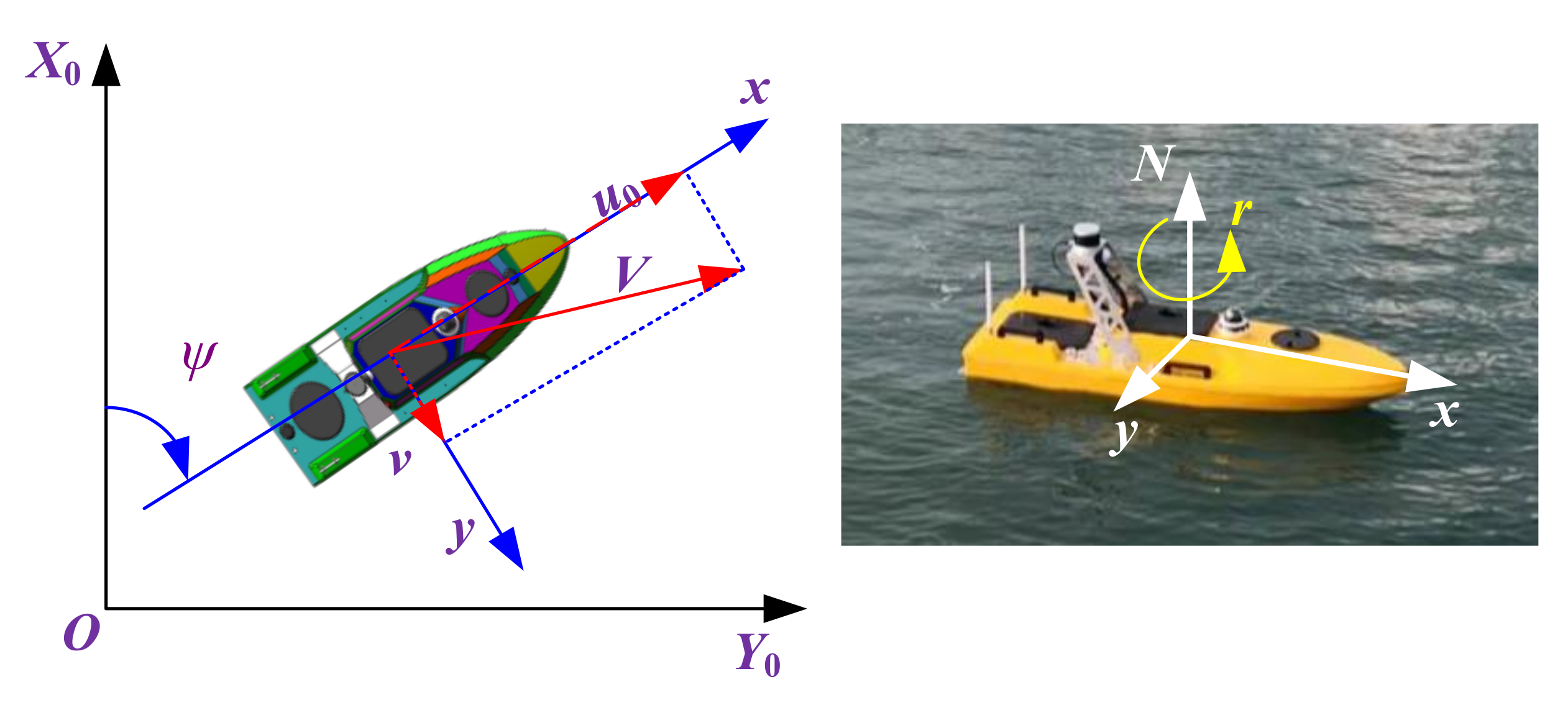
2. Mathematical Models
3. Ship Steering Adaptive CGS Control Based on EKF
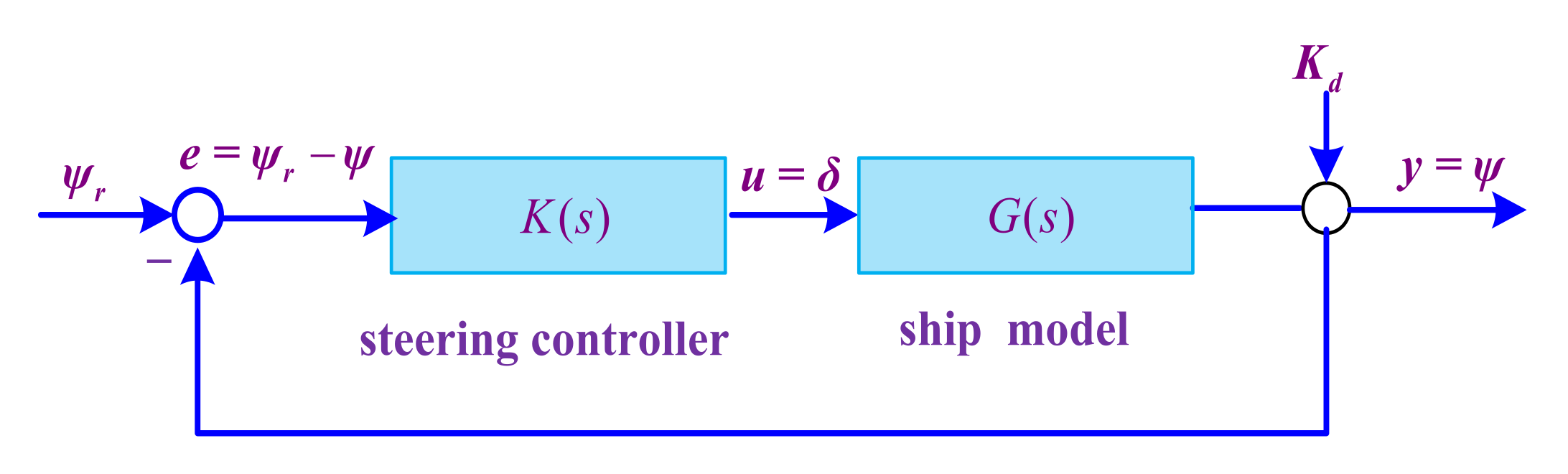
3.1. Ship Steering CGS Controller Design
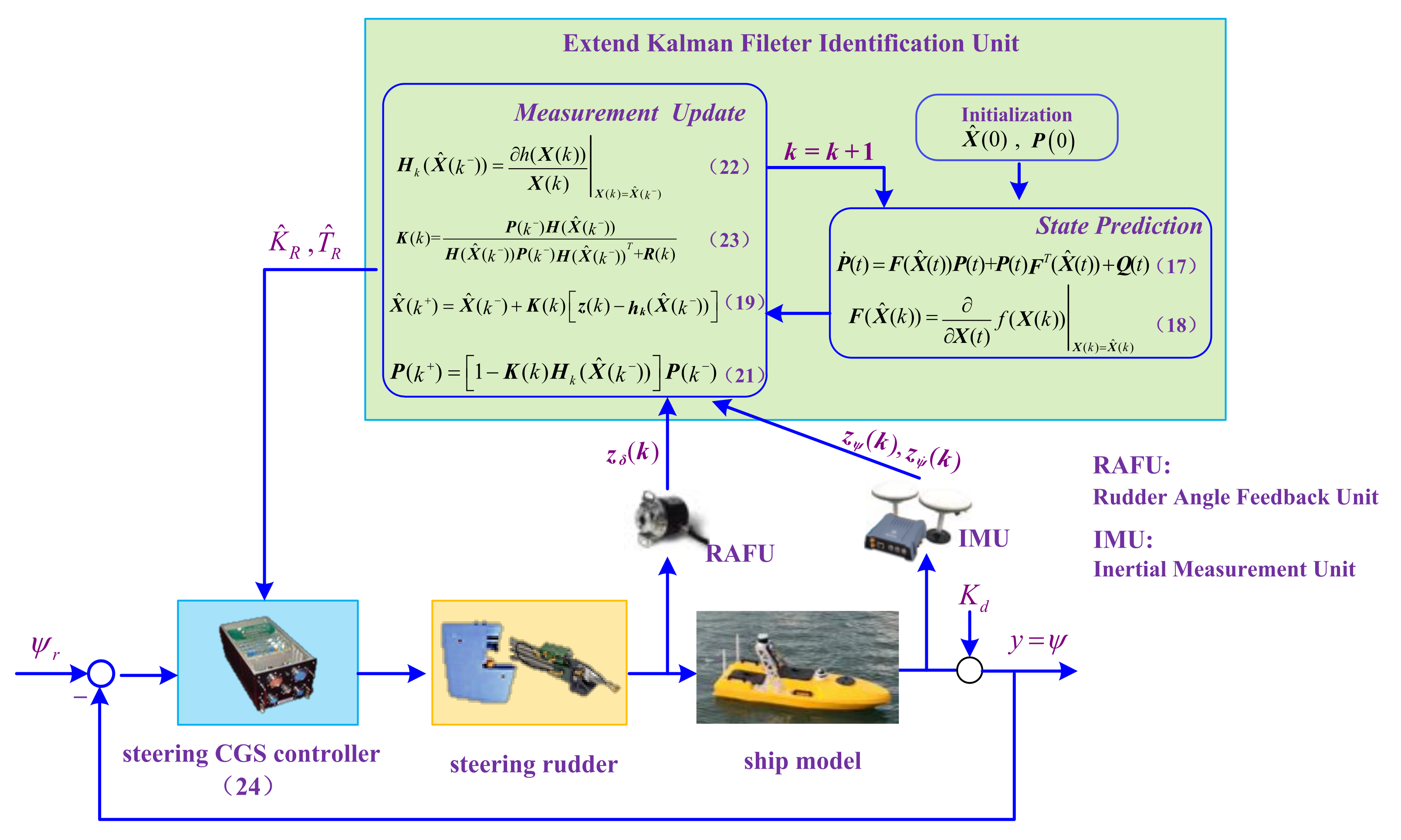
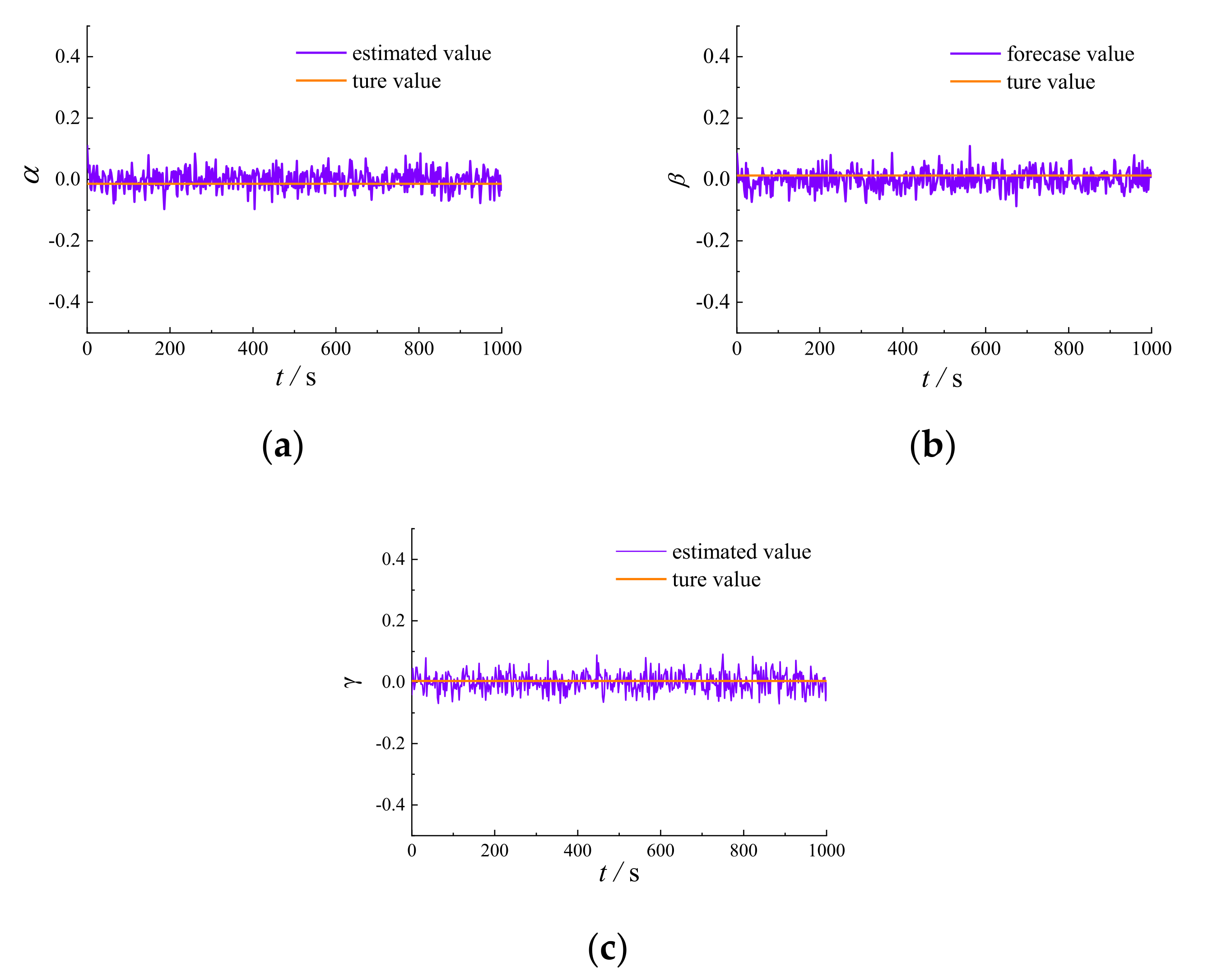
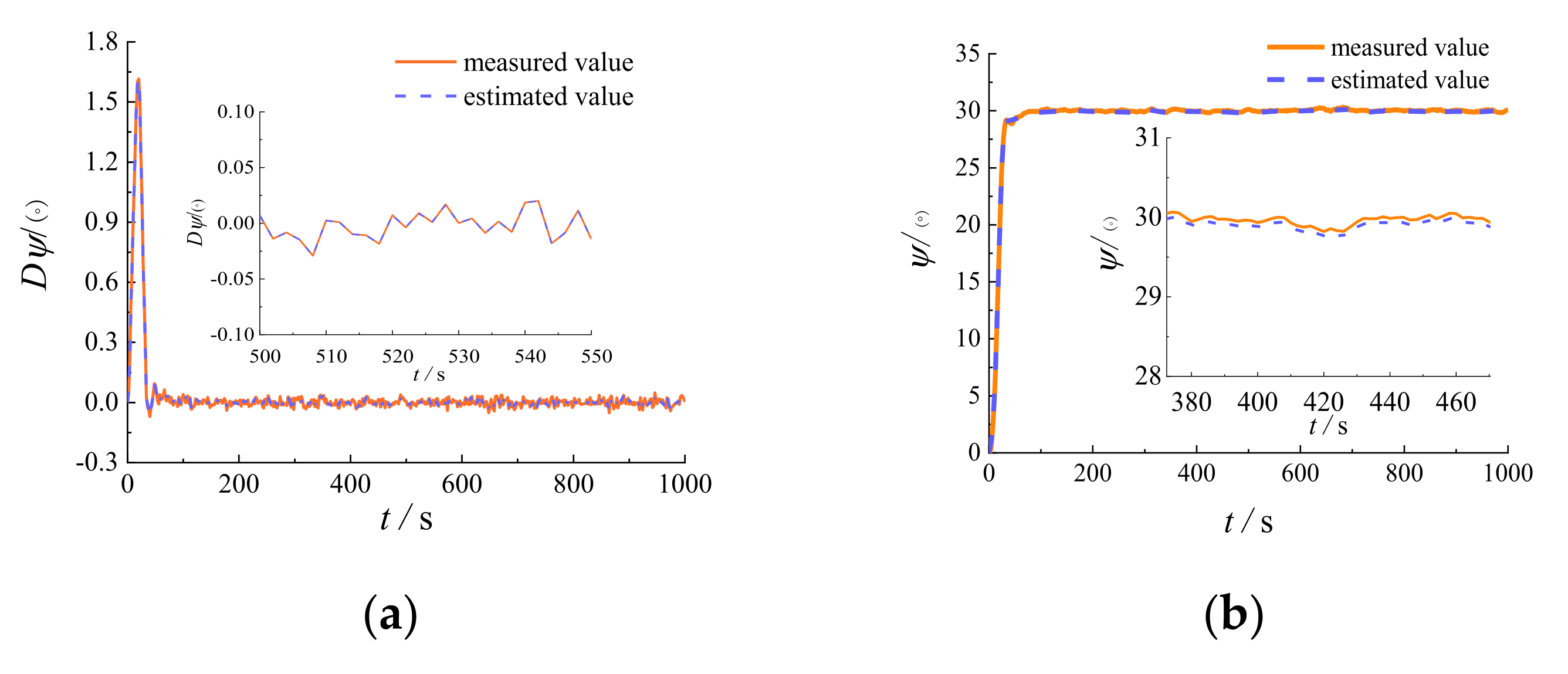
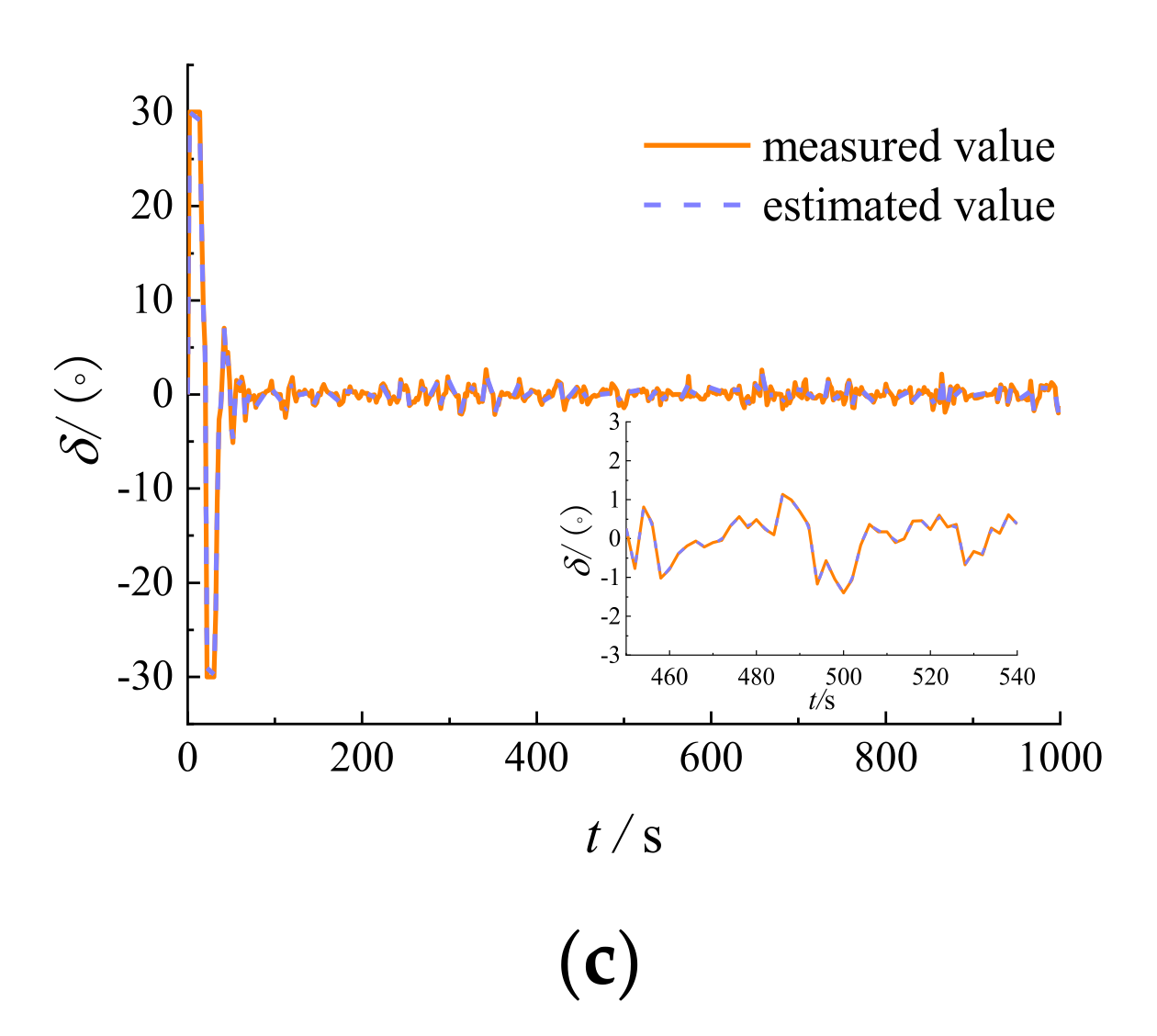
3.2. Extend Kalman Filter Identification
4. Stability Analysis
5. Simulations and Analysis
5.1. Ship Model Description
5.2. Disturbance Description
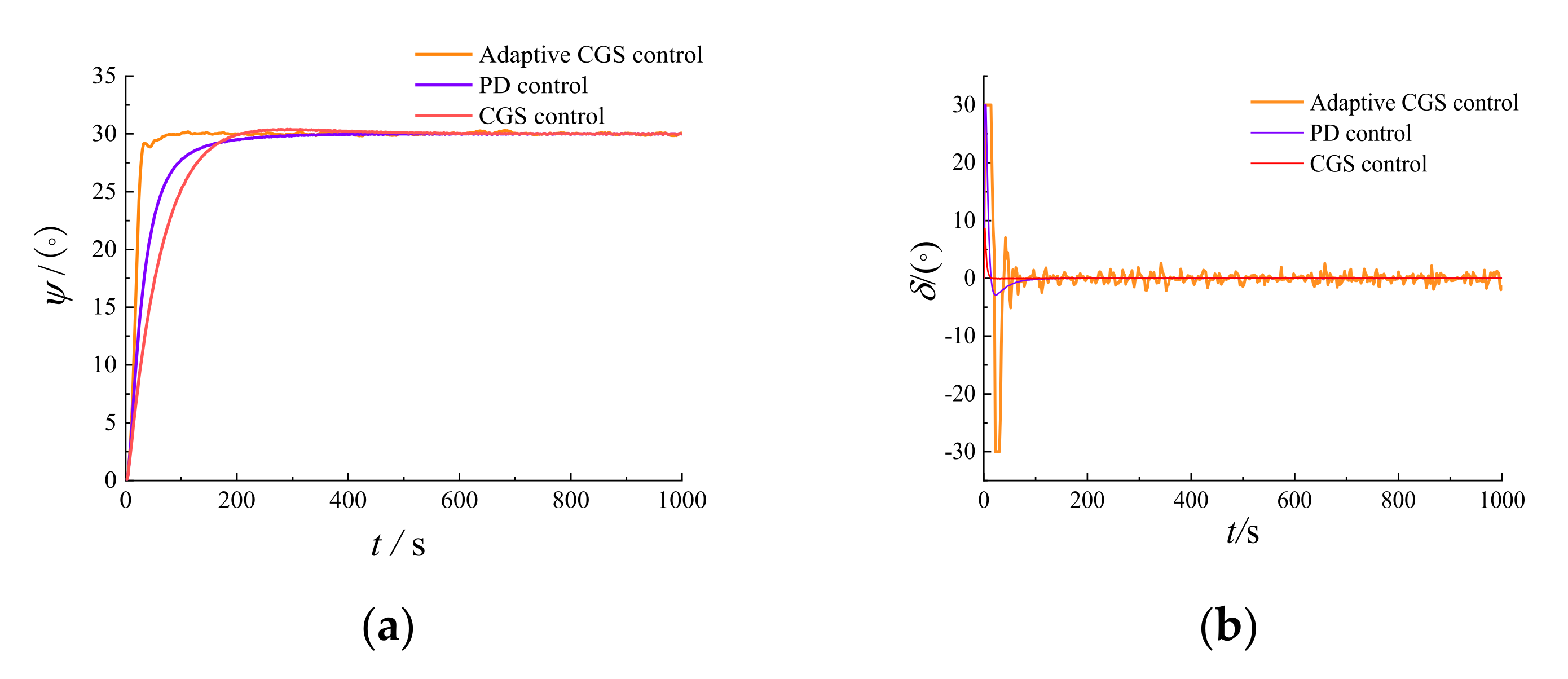
5.3. Course-Keeping Control Comparison and Analysis
5.4. Simulation Results Analysis
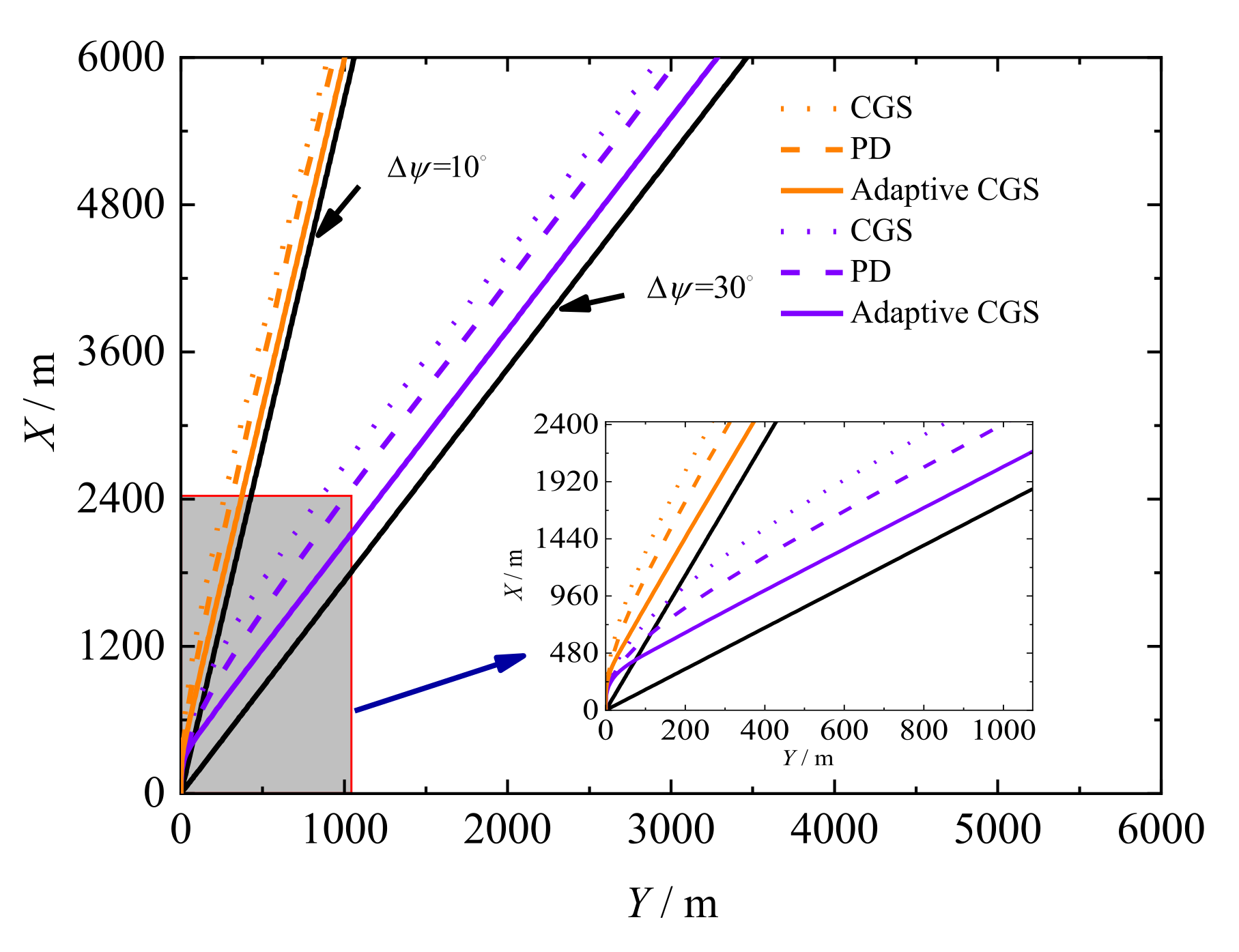
5.5. Trajectory Tracking Analysis and Comparison
6. Conclusions and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Felski, A.; Zwolak, K. The Ocean-Going Autonomous Ship—Challenges and Threats. J. Mar. Sci. Eng. 2020, 8, 41. [Google Scholar] [CrossRef] [Green Version]
- Guan, W.; Zhou, H.; Su, Z.; Zhang, X.; Zhao, C. Ship Steering Control Based on Quantum Neural Network. Complexity 2019, 2019, 1–10. [Google Scholar] [CrossRef]
- Wang, L.; Wu, Q.; Liu, J.; Li, S.; Negenborn, R. State-of-the-Art Research on Motion Control of Maritime Autonomous Surface Ships. J. Mar. Sci. Eng. 2019, 7, 438. [Google Scholar] [CrossRef] [Green Version]
- Minorsky, N. Directional Stability of Automatic Steered Bodies. J. Am. Soc. Nav. Eng. 1922, 34, 280–309. [Google Scholar] [CrossRef]
- Skjetne, R.; Fossen, T.I.; Kokotović, P.V. Adaptive Maneuvering, with Experiments, for a Model Ship in a Marine Control Laboratory. Automatica 2005, 41, 289–298. [Google Scholar] [CrossRef]
- Lei, Z.; Guo, C. Disturbance Rejection Control Solution for Ship Steering System with Uncertain Time Delay. Ocean Eng. 2015, 95, 78–83. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, X.; Bu, R. Active Disturbance Rejection Control of Ship Course Keeping Based on Nonlinear Feedback and ZOH Component. Ocean Eng. 2021, 233, 109136. [Google Scholar] [CrossRef]
- Johansen, T.A.; Fuglseth, T.P.; Tøndel, P.; Fossen, T.I. Optimal Constrained Control Allocation in Marine Surface Vessels with Rudders. Control. Eng. Pract. 2008, 16, 457–464. [Google Scholar] [CrossRef] [Green Version]
- Dong, Y.; Wu, N.; Qi, J.; Chen, X.; Hua, C. Predictive Course Control and Guidance of Autonomous Unmanned Sailboat Based on Efficient Sampled Gaussian Process. J. Mar. Sci. Eng. 2021, 9, 1420. [Google Scholar] [CrossRef]
- Peng, X.Y.; Jia, S.L.; Hu, Z.H. Nonlinear H-infinity Inverse Optimal Output Feedback Control for Ship Course. Control Theory Appl. 2014, 31, 215–222. [Google Scholar]
- Perera, L.P.; Guedes Soares, C. Pre-filtered Sliding Mode Control for Nonlinear Ship Steering Associated with Disturbances. Ocean Eng. 2012, 51, 49–62. [Google Scholar] [CrossRef]
- Tzeng, C.Y.; Goodwin, G.C.; Crisafulli, S. Feedback Linearization Design of a Ship Steering Autopilot with Saturating and Slew Rate Limiting Actuator. Int. J. Adapt. Control Signal Process 1999, 13, 23–30. [Google Scholar] [CrossRef]
- Fossen, T.I.; Strand, J.P. Tutorial on Nonlinear Backstepping: Applications to ship control. Model. Identif. Control A Nor. Res. Bull. 1999, 20, 83–135. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.K.; Yang, G.P.; Zhang, Q.; Zhang, G.Q.; Zhang, Y.Q. Improved Concise Backstepping Control of Course Keeping for Ships Using Nonlinear Feedback Technique. J. Navig. 2017, 70, 1401–1414. [Google Scholar] [CrossRef]
- Zhang, X.K.; Han, X.; Guan, W.; Zhang, G.Q. Improvement of Integrator Backstepping Control for Ships with Concise Robust Control and Nonlinear Decoration. Ocean Eng. 2019, 189, 106349.1–106349.7. [Google Scholar] [CrossRef]
- Le, T.T. Ship heading control system using neural network. J. Mar. Sci. Technol. 2021, 26, 963–972. [Google Scholar] [CrossRef]
- Borkowski, P. Inference Engine in an Intelligent Ship Course-Keeping System. Comput. Intell. Neurosci. 2017, 2017, 2561383. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rigatos, G.; Tzafestas, S. Adaptive Fuzzy Control for the Ship Steering Problem. Mechatronics 2006, 16, 479–489. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, X.; Zhang, G. ANFIS-based Course-Keeping Control for Ships Using Nonlinear Feedback Technique. J. Mar. Sci. Technol. 2018, 24, 1326–1333. [Google Scholar] [CrossRef]
- Qin, H.; Tan, P.; Chen, Z.; Sun, M.; Sun, Q. Deep Reinforcement Learning Based Active Disturbance Rejection Control for Ship Course Control. Neurocomputing 2021. Available online: https://www.sciencedirect.com/science/article/abs/pii/S0925231221015812 (accessed on 1 January 2022).
- Guan, W.; Cao, W.; Sun, J.; Su, Z. Steering Controller Design for Smart Autonomous Surface Vessel Based on CSF L2 Gain Robust Strategy. IEEE Access 2019, 7, 109982–109989. [Google Scholar] [CrossRef]
- Perera, L.P.; Oliveira, P.; Guedes Soares, C. System Identification of Nonlinear Vessel Steering. J. Offshore Mech. Arct. Eng. 2015, 137, 031302. [Google Scholar] [CrossRef] [Green Version]
- Gelb, A. Applied Optimal Estimation; The MIT Press: Cambridge, MA, USA, 1974. [Google Scholar]
- Raman-Nair, W.; Gash, R. Least Squares Identification of Linear Sway-Yaw Manoeuvring Coefficients and Drag-Area Parameters of Ships. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2021, 235, 809–815. [Google Scholar] [CrossRef]
- Xie, S.; Chu, X.; Liu, C.; Liu, J.; Mou, J. Parameter Identification of Ship Motion Model Based on Multi-Innovation Methods. J. Mar. Sci. Technol. 2019, 25, 162–184. [Google Scholar] [CrossRef]
- Jiang, Y.; Wang, X.G.; Zou, Z.J.; Yang, Z.L. Identification of Coupled Response Models for Ship Steering and Roll Motion Using Support Vector Machines. Appl. Ocean Res. 2021, 110, 102607. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controller | tr | MAED | MAID | MAES | MAIS |
|---|---|---|---|---|---|
| Adaptive CGS controller | 18.511 | 28.023 | 2.351 | 0.065 | 0.504 |
| PD controller | 70.648 | 26.766 | 1.079 | 0.015 | 0.017 |
| CGS Controller | 110.181 | 26.771 | 0.086 | 0.030 | 0.004 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guan, W.; Peng, H.; Zhang, X.; Sun, H. Ship Steering Adaptive CGS Control Based on EKF Identification Method. J. Mar. Sci. Eng. 2022, 10, 294. https://doi.org/10.3390/jmse10020294
Guan W, Peng H, Zhang X, Sun H. Ship Steering Adaptive CGS Control Based on EKF Identification Method. Journal of Marine Science and Engineering. 2022; 10(2):294. https://doi.org/10.3390/jmse10020294
Chicago/Turabian StyleGuan, Wei, Haowen Peng, Xianku Zhang, and Hui Sun. 2022. "Ship Steering Adaptive CGS Control Based on EKF Identification Method" Journal of Marine Science and Engineering 10, no. 2: 294. https://doi.org/10.3390/jmse10020294