
Ship Traffic Flow Prediction in Wind Farms Water Area Based on Spatiotemporal Dependence

Abstract
:1. Introduction
2. Literature Review
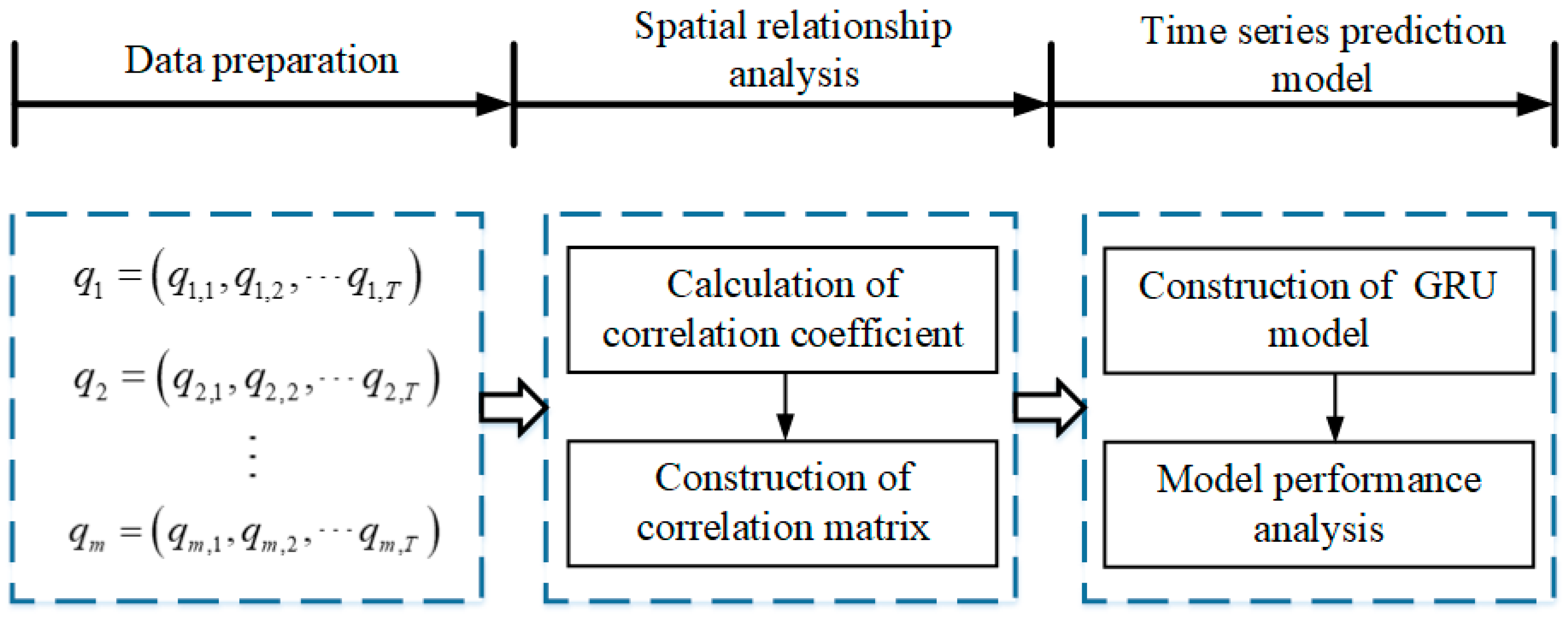
3. Methodology
3.1. Data Preparation
3.2. Analysis of Spatial Dependence of Ship Traffic Flow
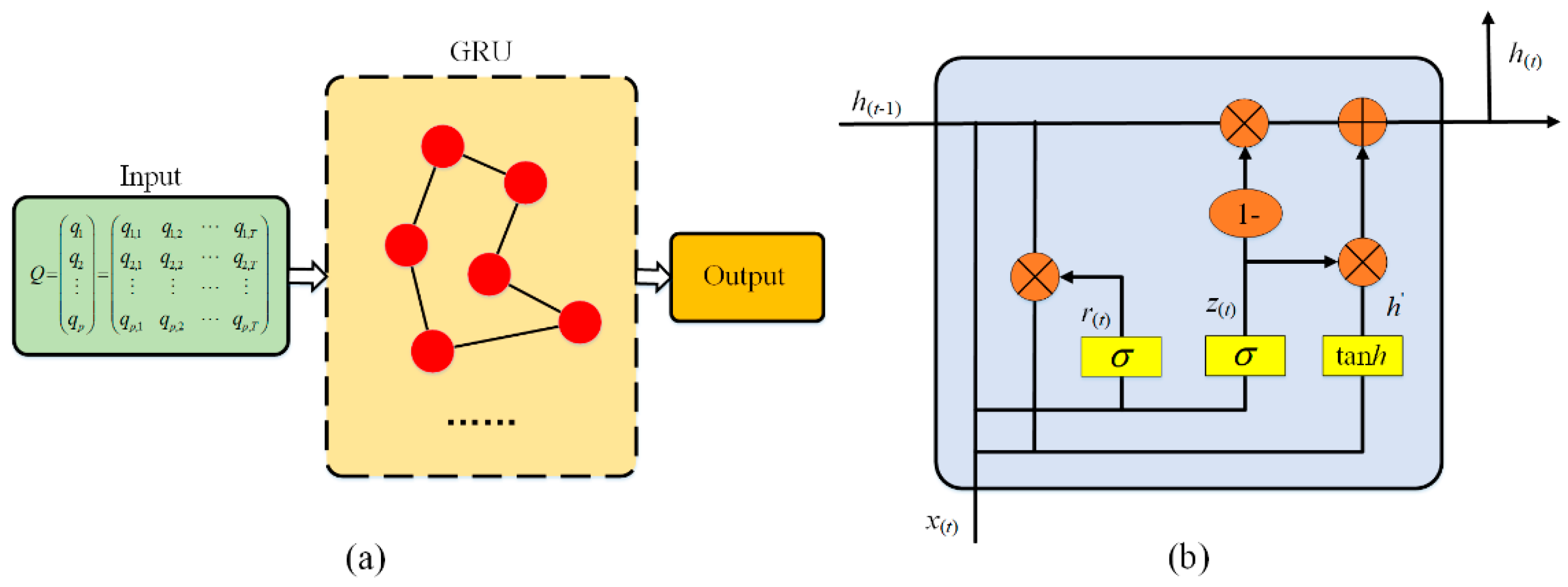
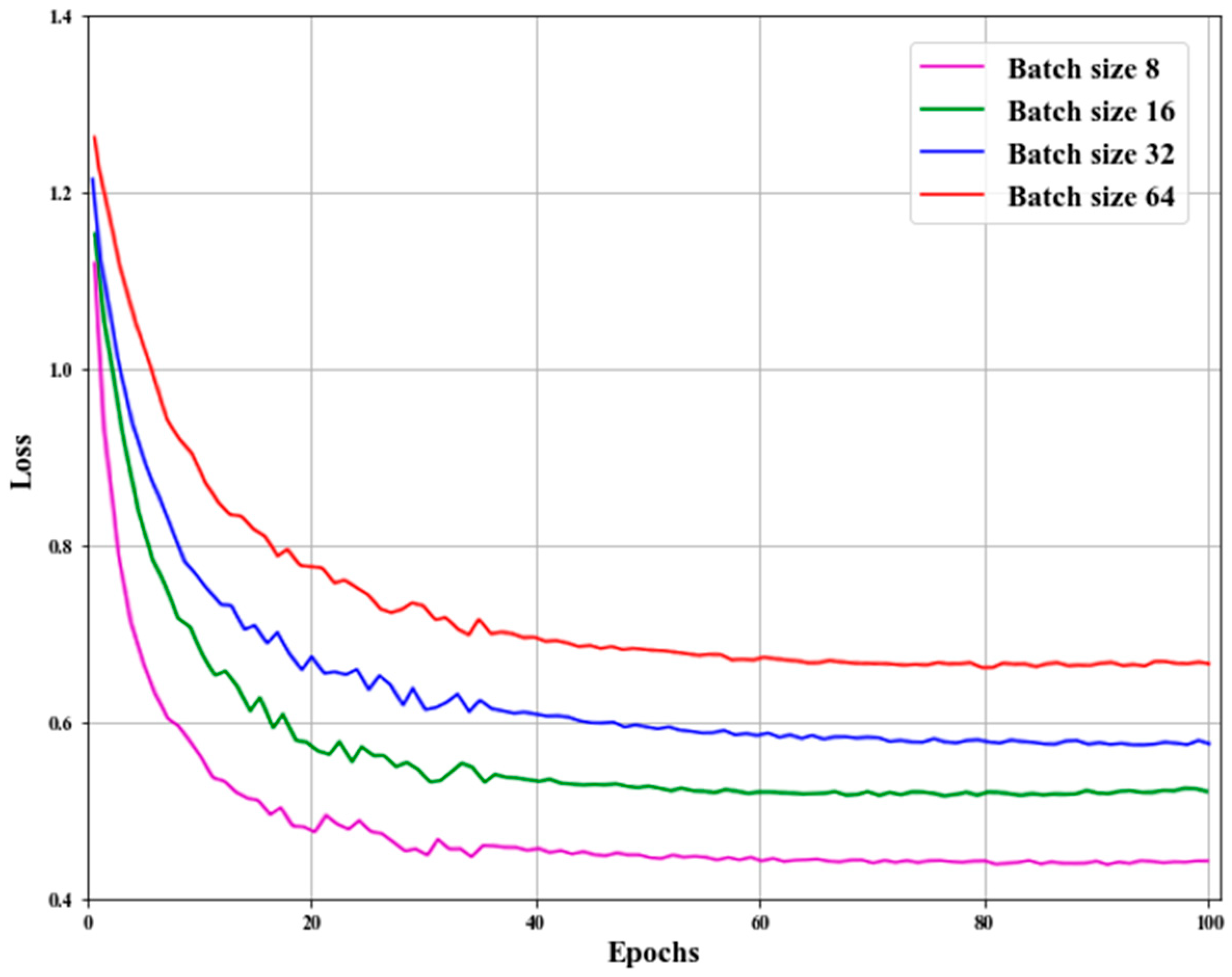
3.3. Time-Series Prediction Model Based on an Improved Recurrent Neural Network
4. Case Study
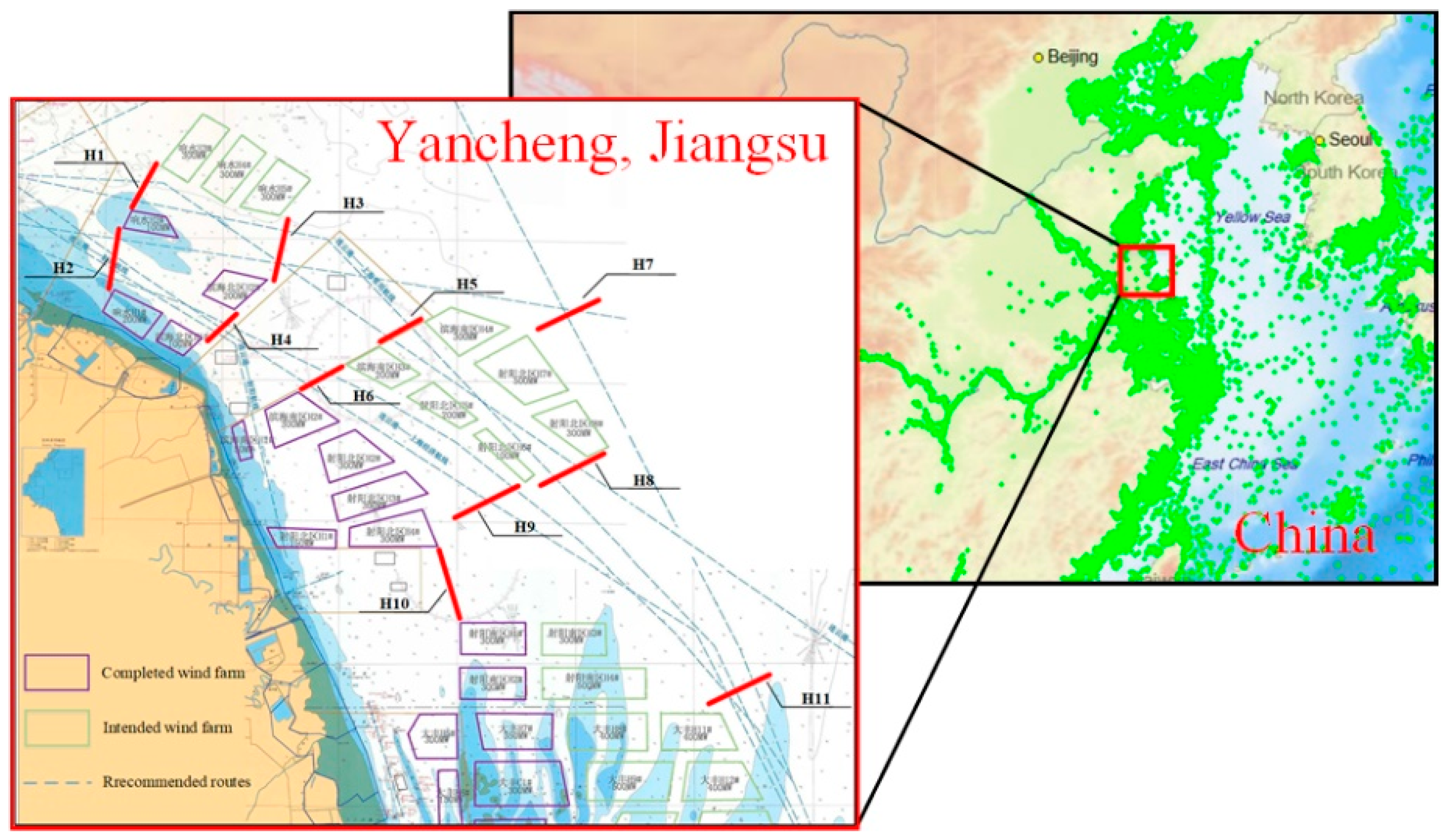
4.1. Research Area and Data
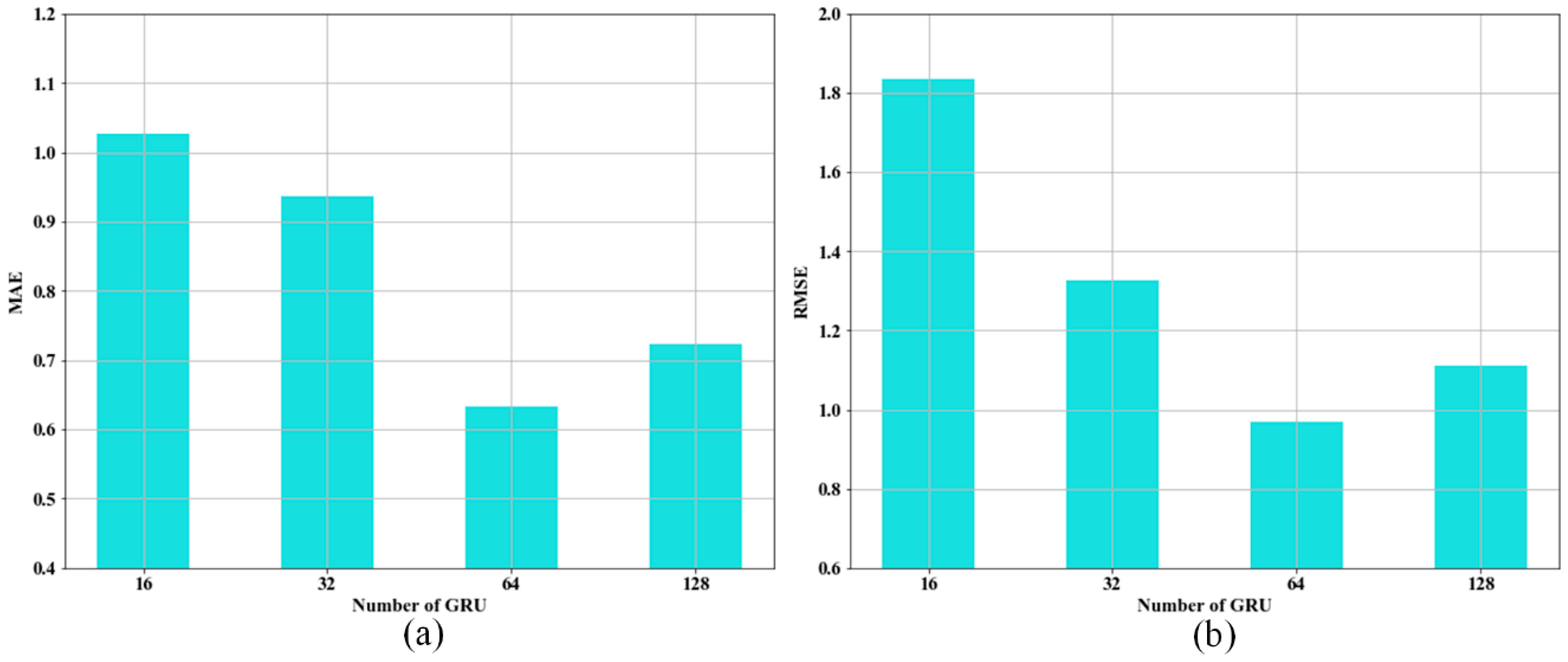
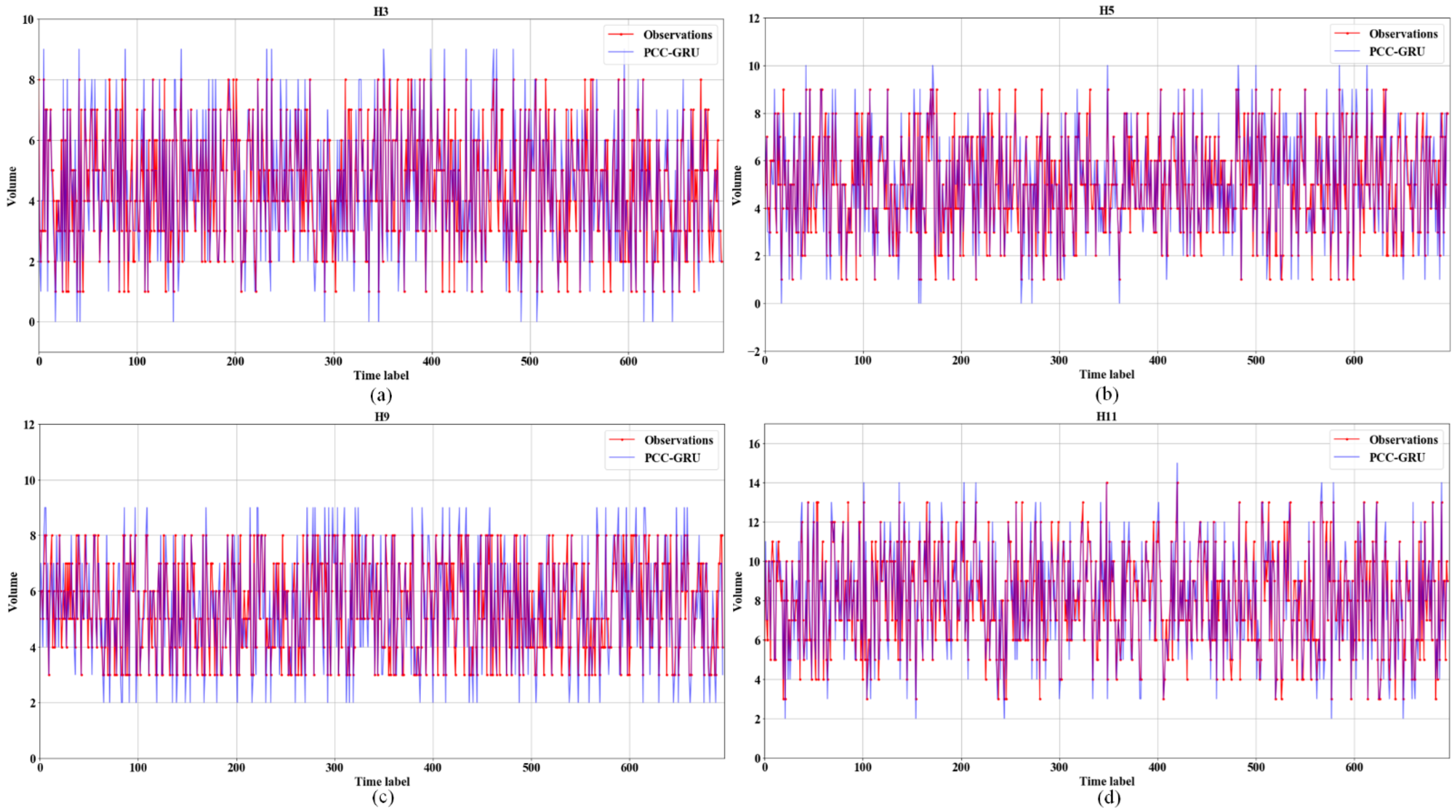
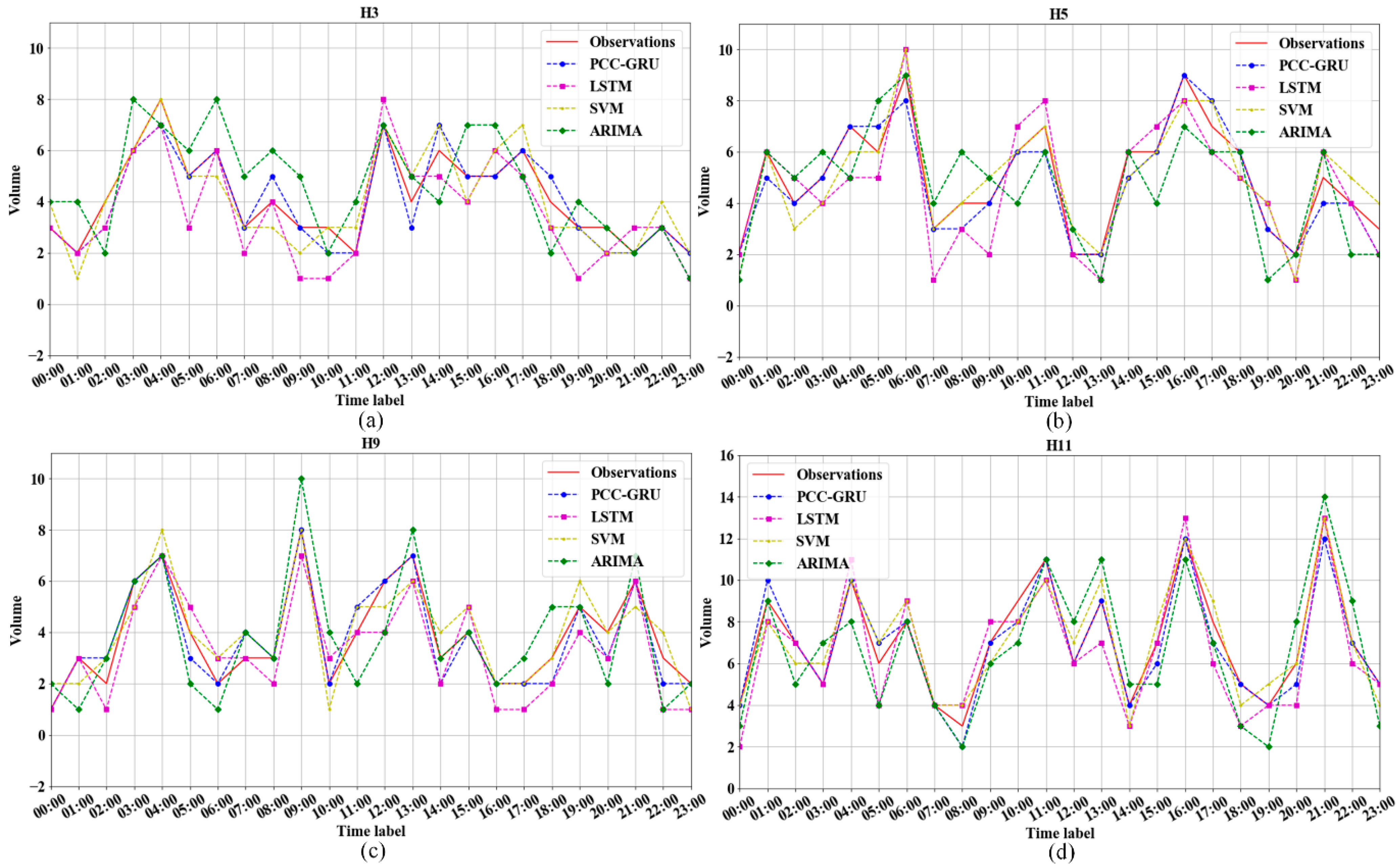
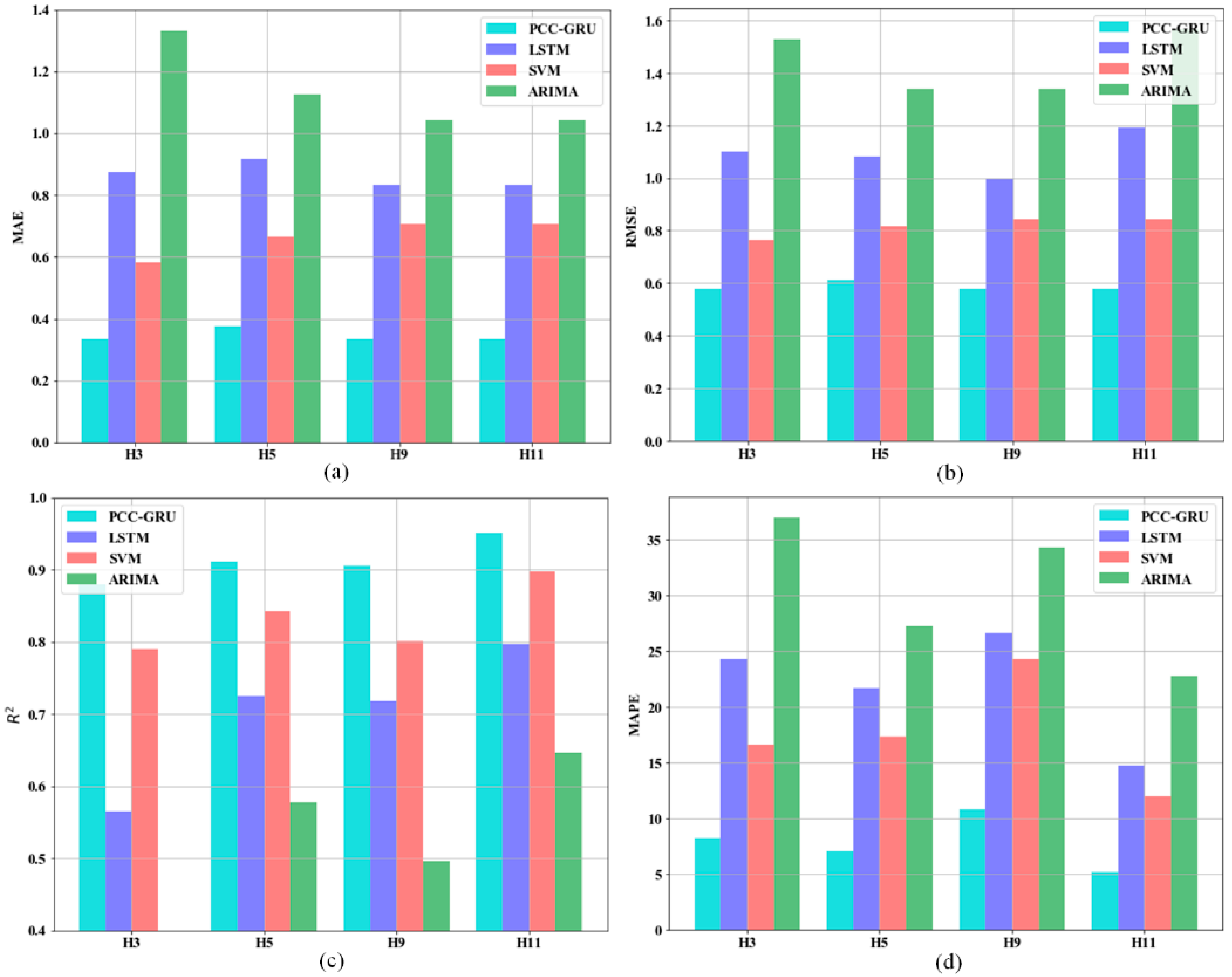
4.2. Results and Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Premalatha, M.; Abbasi, T.; Abbasi, S.A. Wind energy: Increasing deployment, rising environmental concerns. Renew. Sustain. Energy Rev. 2014, 31, 270–288. [Google Scholar]
- Kusiak, A.; Song, Z. Design of wind farm layout for maximum wind energy capture. Renew. Energy 2010, 35, 685–694. [Google Scholar] [CrossRef]
- Wang, X.Y.; Vilathgamuwa, D.M.; Choi, S.S. Determination of battery storage capacity in energy buffer for wind farm. IEEE Trans. Energy Convers. 2008, 23, 868–878. [Google Scholar] [CrossRef]
- Jongbloed, R.H.; van der Wal, J.T.; Lindeboom, H.J. Identifying space for offshore wind energy in the North Sea. Consequences of scenario calculations for interactions with other marine uses. Energy Policy 2014, 68, 320–333. [Google Scholar] [CrossRef]
- Frandsen, S.; Barthelmie, R.; Pryor, S.; Rathmann, O.; Larsen, S.; Højstrup, J.; Thøgersen, M. Analytical modelling of wind speed deficit in large offshore wind farms. Wind. Energy Int. J. Prog. Appl. Wind. Power Convers. Technol. 2006, 9, 39–53. [Google Scholar] [CrossRef]
- Díaz, H.; Soares, C.G. Review of the current status, technology and future trends of offshore wind farms. Ocean Eng. 2020, 209, 107381. [Google Scholar] [CrossRef]
- Hüppop, O.; Dierschke, J.; Exo, K.M.; Fredrich, E.; Hill, R. Bird migration studies and potential collision risk with offshore wind turbines. Ibis 2006, 148, 90–109. [Google Scholar] [CrossRef]
- Dai, L.; Ehlers, S.; Rausand, M.; Utne, I.B. Risk of collision between service vessels and offshore wind turbines. Reliab. Eng. Syst. Saf. 2013, 109, 18–31. [Google Scholar] [CrossRef]
- Ren, N.X.; Ou, J.P. A crashworthy device against ship-OWT collision and its protection effects on the tower of offshore wind farms. China Ocean Eng. 2009, 23, 594–602. [Google Scholar]
- Furness, R.W.; Wade, H.M.; Masden, E.A. Assessing vulnerability of marine bird populations to offshore wind farms. J. Environ. Manag. 2013, 119, 56–66. [Google Scholar] [CrossRef]
- Shafiee, M. A fuzzy analytic network process model to mitigate the risks associated with offshore wind farms. Expert Syst. Appl. 2015, 42, 2143–2152. [Google Scholar] [CrossRef]
- Sun, H.; Liu, H.; Xiao, H.; He, R.; Ran, B. Use of local linear regression model for short-term traffic forecasting. Transp. Res. Rec. 2003, 1836, 143–150. [Google Scholar] [CrossRef]
- Williams, B.M.; Hoel, L.A. Modeling and forecasting vehicular traffic flow as a seasonal ARIMA process: Theoretical basis and empirical results. J. Transp. Eng. 2003, 129, 664–672. [Google Scholar] [CrossRef] [Green Version]
- Getahun, K.A. Time series modeling of road traffic accidents in Amhara Region. J. Big Data 2021, 8, 1–15. [Google Scholar] [CrossRef]
- Guo, J.; Huang, W.; Williams, B.M. Adaptive Kalman filter approach for stochastic short-term traffic flow rate prediction and uncertainty quantification. Transp. Res. Part C Emerg. Technol. 2014, 43, 50–64. [Google Scholar] [CrossRef]
- Xie, Y.; Zhang, Y.; Ye, Z. Short-term traffic volume forecasting using kalman filter with discrete wavelet decomposition. Comput.-Aided Civ. Infrastruct Eng. 2007, 22, 326–334. [Google Scholar] [CrossRef]
- Saeedmanesh, M.; Kouvelas, A.; Geroliminis, N. An extended Kalman filter approach for real-time state estimation in multi-region MFD urban networks. Transp. Res. Part C Emerg. Technol. 2021, 132, 103384. [Google Scholar] [CrossRef]
- Smith, B.L.; Demetsky, M.J. Forecasting freeway traffic flow for intelligent transportation systems application. Transp. Res. Part A Policy Pract. 1997, 31, 61. [Google Scholar]
- Smith, B.L.; Williams, B.M.; Oswald, R.K. Comparison of parametric and nonparametric models for traffic flow forecasting. Transp. Res. Part C Emerg. Technol. 2002, 10, 303–321. [Google Scholar] [CrossRef]
- Zheng, Z.; Su, D. Short-term traffic volume forecasting: A k-nearest neighbor approach enhanced by constrained linearly sewing principle component algorithm. Transp. Res. Part C Emerg. Technol. 2014, 43, 143–157. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Boukerche, A. Non-parametric models with optimized training strategy for vehicles traffic flow prediction. Comput. Netw. 2021, 187, 107791. [Google Scholar] [CrossRef]
- Castillo, E.; Menéndez, J.M.; Sánchez-Cambronero, S. Predicting traffic flow using bayesian networks. Transp. Res. Part B Meth. 2008, 42, 482–509. [Google Scholar] [CrossRef]
- Wang, J.; Deng, W.; Guo, Y. New Bayesian combination method for short-term traffic flow forecasting. Transp. Res. Part C Emerg. Technol. 2014, 43, 79–94. [Google Scholar] [CrossRef]
- Afrin, T.; Yodo, N. A probabilistic estimation of traffic congestion using Bayesian network. Measurement 2021, 174, 109051. [Google Scholar] [CrossRef]
- Qi, Y.; Ishak, S. A hidden Markov model for short term prediction of traffic conditions on freeways. Transp. Res. Part C Emerg. Technol. 2014, 43, 95–111. [Google Scholar] [CrossRef]
- Rajawat, N.; Gupta, N.; Lalwani, S. A comprehensive review of hidden Markov model applications in prediction of human mobility patterns. Int. J. Swarm Intell. 2021, 6, 24–47. [Google Scholar] [CrossRef]
- Zhang, C.; Chen, L. Traffic flow combining forecast model based on least squares support vector machine. J. Hunan Inst. Eng. 2010, 20, 56–58. [Google Scholar]
- Wang, J.; Shi, Q. Short-term traffic speed forecasting hybrid model based on Chaos-Wavelet analysis-support vector machine theory. Transp. Res. Part C Emerg. Technol. 2013, 27, 219–232. [Google Scholar] [CrossRef]
- Hu, Y.; Wu, C.; Liu, H. Prediction of passenger flow on the highway based on the least square support vector machine. Transp. Res. J. Vilnius Gedim. Tech. Univ. Lith. Acad Sci. 2011, 26, 197–203. [Google Scholar]
- Castro-Neto, M.; Jeong, Y.S.; Jeong, M.K.; Han, L.D. Online-SVR for short-term traffic flow prediction under typical and atypical traffic conditions. Expert Syst. Appl. 2009, 36, 6164–6173. [Google Scholar] [CrossRef]
- Asif, M.T.; Dauwels, J.; Chong, Y.G.; Oran, A.; Fathi, E.; Xu, M. Spatiotemporal patterns in large-scale traffic speed prediction. IEEE Trans. Intell. Transp. Syst. 2014, 15, 794–804. [Google Scholar] [CrossRef] [Green Version]
- Yao, B.; Yao, J.; Zhang, M.; Yu, L. Improved support vector machine regression in multi-step-ahead prediction for rock displacement surrounding a tunnel. Sci. Iran. 2014, 21, 1309–1316. [Google Scholar]
- Toan, T.D.; Truong, V.H. Support vector machine for short-term traffic flow prediction and improvement of its model training using nearest neighbor approach. Transp. Res. Rec. 2021, 2675, 362–373. [Google Scholar] [CrossRef]
- Hong, H.; Huang, W.; Xing, X.; Zhou, X. Hybrid multi-metric K-nearest neighbor regression for traffic flow prediction. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015; pp. 2262–2267. [Google Scholar]
- Akbari, M.; Overloop, P.J.V.; Afshar, A. Clustered K nearest neighbor algorithm for daily inflow forecasting. Water Resour. Manag. 2011, 25, 1341–1357. [Google Scholar] [CrossRef] [Green Version]
- Yu, B.; Song, X.; Guan, F.; Yang, Z.; Yao, B. K-nearest neighbor model for multiple-time-step prediction of short-term traffic condition. J. Transp. Eng. 2016, 142, 04016018. [Google Scholar] [CrossRef]
- Du, W.; Zhang, Q.; Chen, Y.; Ye, Z. San urban short-term traffic flow prediction model based on wavelet neural network with improved whale optimization algorithm. Sustain. Cities Soc. 2021, 69, 102858. [Google Scholar] [CrossRef]
- Li, L.; Yang, Y.; Yuan, Z.; Chen, Z. A spatial-temporal approach for traffic status analysis and prediction based on bi-lstm structure. Mod. Phys. Lett. B 2021, 35, 2150481. [Google Scholar] [CrossRef]
- Wang, K.; Ma, C.; Qiao, Y.; Lu, X.; Hao, W.; Dong, S. A hybrid deep learning model with 1DCNN-LSTM-Attention networks for short-term traffic flow prediction. Phys. A 2021, 583, 126293. [Google Scholar] [CrossRef]
- Chen, X.; Chen, H.; Yang, Y.; Wu, H.; Zhang, W.; Zhao, J.; Xiong, Y. Traffic flow prediction by an ensemble framework with data denoising and deep learning model. Phys. A 2021, 565, 125574. [Google Scholar] [CrossRef]
- Cheng, Z.; Lu, J.; Zhou, H.; Zhang, Y.; Zhang, L. Short-Term Traffic Flow Prediction: An Integrated Method of Econometrics and Hybrid Deep Learning. IEEE Trans. Intell. Transp. Syst. 2021, 1–14. [Google Scholar] [CrossRef]
- Zheng, H.; Lin, F.; Feng, X.; Chen, Y. A hybrid deep learning model with attention-based conv-LSTM networks for short-term traffic flow prediction. IEEE Trans. Intell. Transp. Syst. 2020, 22, 6910–6920. [Google Scholar] [CrossRef]
- Li, H. Research on prediction of traffic flow based on dynamic fuzzy neural networks. Neural Comput. Appl. 2016, 27, 1969–1980. [Google Scholar] [CrossRef]
- Huang, W.; Song, G.; Hong, H.; Xie, K. Deep architecture for traffic flow prediction: Deep belief networks with multitask learning. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2191–2201. [Google Scholar] [CrossRef]
- Yang, H.F.; Dillon, T.S.; Chen, Y.P. Optimized structure of the traffic flow forecasting model with a deep learning approach. IEEE Trans. Neural Netw. Learn. Syst. 2016, 28, 2371–2381. [Google Scholar] [CrossRef]
- Lu, S.; Zhang, Q.; Chen, G.; Seng, D. A combined method for short-term traffic flow prediction based on recurrent neural network. Alex Eng. J. 2021, 60, 87–94. [Google Scholar] [CrossRef]
- Ho, L.W.; Lie, T.T.; Leong, P.T.; Clear, T. Developing offshore wind farm siting criteria by using an international Delphi method. Energy Policy 2018, 113, 53–67. [Google Scholar] [CrossRef]
- Noorollahi, Y.; Yousefi, H.; Mohammadi, M. Multi-criteria decision support system for wind farm site selection using GIS. Sustain. Energy Technol. Assess. 2016, 13, 8–50. [Google Scholar] [CrossRef]
- Florian, M.; Sørensen, J.D. Risk-based planning of operation and maintenance for offshore wind farms. Energy Procedia 2017, 137, 261–272. [Google Scholar] [CrossRef]
- Martin, R.; Lazakis, I.; Barbouchi, S.; Johanning, L. Sensitivity analysis of offshore wind farm operation and maintenance cost and availability. Renew. Energy 2016, 85, 1226–1236. [Google Scholar] [CrossRef] [Green Version]
- Santos, F.P.; Teixeira, A.P.; Guedes Soares, C. Maintenance planning of an offshore wind turbine using stochastic Petri nets with predicates. J. Offshore Mech. Arct. Eng. 2018, 140, 021904. [Google Scholar] [CrossRef]
- Höfer, T.; Sunak, Y.; Siddique, H.; Madlener, R. Wind farm siting using a spatial Analytic Hierarchy Process approach: A case study of the Städteregion Aachen. Appl. Energy 2016, 163, 222–243. [Google Scholar] [CrossRef]
- Hooper, T.; Hattam, C.; Austen, M. Recreational use of offshore wind farms: Experiences and opinions of sea anglers in the UK. Mar. Policy 2017, 78, 55–60. [Google Scholar] [CrossRef] [Green Version]
- Cervera, M.A.; Ginesi, A.; Eckstein, K. Satellite-based vessel Automatic Identification System: A feasibility and performance analysis. Int. J. Satell. Commun. Netw. 2011, 29, 117–142. [Google Scholar] [CrossRef]
- Sang, L.Z.; Wall, A.; Mao, Z.; Yan, X.P.; Wang, J. A novel method for restoring the trajectory of the inland waterway ship by using AIS data. Ocean Eng. 2015, 110, 183–194. [Google Scholar] [CrossRef] [Green Version]
- Benesty, J.; Chen, J.; Huang, Y.; Cohen, I. Pearson correlation coefficient. In Noise Reduction in Speech Processing; Springer: Berlin/Heidelberg, Germany, 2009; pp. 1–4. [Google Scholar]
- Zuo, F.; Li, Y.; Johnson, S.; Johnson, J.; Varughese, S.; Copes, R.; Chen, H. Temporal and spatial variability of traffic-related noise in the City of Toronto, Canada. Sci. Total Environ. 2014, 472, 1100–1107. [Google Scholar] [CrossRef] [PubMed]
- Fu, R.; Zhang, Z.; Li, L. Using LSTM and GRU neural network methods for traffic flow prediction. In Proceedings of the 2016 31st Youth Academic Annual Conference of Chinese Association of Automation (YAC), Wuhan, China, 11–13 November 2016; IEEE: Piscataway, NJ, USA; pp. 324–328. [Google Scholar]
- Zhang, D.; Kabuka, M.R. Combining weather condition data to predict traffic flow: A GRU-based deep learning approach. IET Intell. Transp. Syst. 2018, 12, 578–585. [Google Scholar] [CrossRef]
- Wang, S.; Zhao, J.; Shao, C.; Dong, C.D.; Yin, C. Truck traffic flow prediction based on LSTM and GRU methods with sampled GPS data. IEEE Access 2020, 8, 208158–208169. [Google Scholar] [CrossRef]
- Cho, K.; Van Merriënboer, B.; Bahdanau, D.; Bengio, Y. On the properties of neural machine translation: Encoder-decoder approaches. arXiv 2014, arXiv:1409.1259. [Google Scholar]
- Liang, M.; Zhan, Y.; Liu, R.W. MVFFNet: Multi-view feature fusion network for imbalanced ship classification. Pattern Recognit. Lett. 2021, 151, 26–32. [Google Scholar] [CrossRef]
- Wang, Y.; Liao, W.; Chang, Y. Gated recurrent unit network-based short-term photovoltaic forecasting. Energies 2018, 11, 2163. [Google Scholar] [CrossRef] [Green Version]
- Zheng, G.; Chai, W.K.; Katos, V.; Walton, M. A joint temporal-spatial ensemble model for short-term traffic prediction. Neurocomputing 2021, 457, 26–39. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sections | P1 | P2 |
|---|---|---|
| H1 | 120.06495° E 34.75165° N | 120.13086° E 34.96235° N |
| H2 | 120.02375° E 34.69723° N | 119.96195° E 34.42275° N |
| H3 | 120.35502° E 34.76512° N | 120.27413° E 34.64402° N |
| H4 | 120.26468° E 34.49281° N | 120.20728° E 34.42028° N |
| H5 | 120.57021° E 34.48273° N | 120.47371° E 34.43313° N |
| H6 | 120.47302° E 34.35673° N | 120.57023° E 34.30368° N |
| H7 | 121.30618° E 34.65731° N | 121.08612° E 34.45872° N |
| H8 | 121.04723° E 34.20372° N | 120.93305° E 34.15846° N |
| H9 | 120.88817° E 34.13275° N | 120.77619° E 34.08367° N |
| H10 | 120.72357° E 34.06888° N | 120.78652° E 33.81706° N |
| H11 | 121.32603° E 33.78164° N | 121.21804° E 33.26723° N |
| Time | q1 | q2 | q3 | q4 | q5 | q6 | q7 | q8 | q9 | q10 | q11 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 0:00 | 2 | 2 | 3 | 3 | 2 | 2 | 5 | 5 | 1 | 3 | 5 |
| 1:00 | 2 | 1 | 2 | 4 | 6 | 3 | 4 | 3 | 3 | 3 | 10 |
| 2:00 | 5 | 3 | 4 | 3 | 4 | 4 | 3 | 2 | 2 | 3 | 6 |
| 3:00 | 2 | 3 | 6 | 4 | 5 | 3 | 4 | 5 | 6 | 3 | 6 |
| 4:00 | 4 | 4 | 8 | 4 | 7 | 6 | 6 | 2 | 7 | 6 | 9 |
| 5:00 | 4 | 5 | 5 | 2 | 6 | 3 | 2 | 4 | 4 | 3 | 6 |
| 6:00 | 5 | 2 | 6 | 5 | 9 | 4 | 3 | 6 | 2 | 5 | 11 |
| 7:00 | 5 | 3 | 3 | 2 | 3 | 5 | 4 | 5 | 3 | 2 | 4 |
| 8:00 | 7 | 4 | 4 | 4 | 4 | 5 | 2 | 5 | 3 | 5 | 5 |
| 9:00 | 5 | 2 | 3 | 3 | 4 | 4 | 5 | 7 | 8 | 6 | 2 |
| 10:00 | 4 | 5 | 3 | 4 | 6 | 3 | 3 | 5 | 2 | 5 | 9 |
| 11:00 | 6 | 4 | 2 | 3 | 7 | 4 | 5 | 4 | 4 | 3 | 13 |
| 12:00 | 7 | 2 | 7 | 5 | 2 | 2 | 1 | 7 | 6 | 4 | 6 |
| 13:00 | 6 | 3 | 4 | 4 | 2 | 5 | 5 | 2 | 7 | 4 | 8 |
| 14:00 | 5 | 4 | 6 | 2 | 6 | 4 | 4 | 6 | 3 | 5 | 4 |
| 15:00 | 6 | 2 | 5 | 3 | 6 | 6 | 6 | 7 | 4 | 3 | 6 |
| 16:00 | 8 | 1 | 5 | 2 | 9 | 5 | 7 | 4 | 2 | 3 | 11 |
| 17:00 | 6 | 2 | 6 | 3 | 7 | 4 | 4 | 7 | 2 | 2 | 8 |
| 18:00 | 3 | 3 | 4 | 3 | 6 | 6 | 4 | 5 | 3 | 6 | 7 |
| 19:00 | 4 | 6 | 3 | 5 | 3 | 6 | 6 | 4 | 5 | 7 | 4 |
| 20:00 | 6 | 3 | 3 | 3 | 2 | 3 | 2 | 6 | 4 | 1 | 3 |
| 21:00 | 4 | 5 | 2 | 6 | 5 | 3 | 6 | 5 | 6 | 2 | 9 |
| 22:00 | 2 | 2 | 3 | 3 | 4 | 5 | 5 | 3 | 3 | 4 | 6 |
| 23:00 | 3 | 3 | 2 | 1 | 3 | 4 | 3 | 5 | 2 | 3 | 8 |
| Hyperparameter | Value |
|---|---|
| Epochs | 100 |
| Dropout Rate | Rate |
| Learning Rate | 0.0005 |
| Batch Size | 8 |
| Hidden Unit | 64 |
| Threshold | Section Related to H3 | Time Steps | MAE | RMSE | MAPE | R2 |
|---|---|---|---|---|---|---|
| 0.8 | / | 3 | 1.61207 | 1.75961 | 42.58056 | 0.16006 |
| 4 | 1.16523 | 1.38184 | 34.99692 | 0.48199 | ||
| 5 | 0.69115 | 0.82319 | 18.32865 | 0.71491 | ||
| 6 | 0.67851 | 0.80884 | 19.62209 | 0.81716 | ||
| 7 | 0.65454 | 0.78254 | 18.45094 | 0.82826 | ||
| 0.7 | H1 H5 | 3 | 1.47985 | 1.69798 | 41.62103 | 0.15091 |
| 4 | 1.16954 | 1.38582 | 33.64929 | 0.47622 | ||
| 5 | 0.70286 | 0.88204 | 20.64433 | 0.82194 | ||
| 6 | 0.66256 | 0.83853 | 19.73351 | 0.80314 | ||
| 7 | 0.65273 | 0.74592 | 18.75563 | 0.81522 | ||
| 0.6 | H1 H5 H8 | 3 | 1.31057 | 1.68343 | 39.71651 | 0.13742 |
| 4 | 1.20977 | 1.30272 | 36.35331 | 0.45431 | ||
| 5 | 0.66667 | 0.81497 | 20.85102 | 0.81914 | ||
| 6 | 0.66667 | 0.76497 | 19.59404 | 0.88914 | ||
| 7 | 0.53453 | 0.68563 | 10.65256 | 0.90365 | ||
| 0.5 | H1 H5 H8 | 3 | 1.31057 | 1.68343 | 39.71651 | 0.13742 |
| 4 | 1.20977 | 1.30272 | 36.35331 | 0.45431 | ||
| 5 | 0.66667 | 0.81497 | 20.85102 | 0.81914 | ||
| 6 | 0.66667 | 0.76497 | 19.59404 | 0.88914 | ||
| 7 | 0.53453 | 0.68563 | 10.65256 | 0.90365 |
| Threshold | Section Related to H5 | Time Steps | MAE | RMSE | MAPE | R2 |
|---|---|---|---|---|---|---|
| 0.8 | / | 3 | 1.58275 | 1.76979 | 38.51897 | 0.22023 |
| 4 | 1.21120 | 1.41877 | 30.82569 | 0.49887 | ||
| 5 | 0.67241 | 0.82000 | 16.96503 | 0.83260 | ||
| 6 | 0.66235 | 0.81385 | 16.22976 | 0.83510 | ||
| 7 | 0.64080 | 0.80765 | 16.31632 | 0.83760 | ||
| 0.7 | H3 H8 | 3 | 1.41724 | 1.75878 | 38.06598 | 0.39443 |
| 4 | 1.16666 | 1.39777 | 29.46423 | 0.51568 | ||
| 5 | 0.66816 | 0.81505 | 16.21954 | 0.83117 | ||
| 6 | 0.63662 | 0.79003 | 15.56588 | 0.84225 | ||
| 7 | 0.63345 | 0.72873 | 15.60616 | 0.85674 | ||
| 0.6 | H1 H3 H8 | 3 | 1.39669 | 1.69558 | 36.73457 | 0.32426 |
| 4 | 1.16373 | 1.33858 | 28.51531 | 0.59998 | ||
| 5 | 0.66104 | 0.80524 | 15.78878 | 0.82455 | ||
| 6 | 0.64689 | 0.78769 | 13.30716 | 0.89652 | ||
| 7 | 0.62234 | 0.71074 | 9.47337 | 0.91359 | ||
| 0.5 | H1 H3 H8 | 3 | 1.39669 | 1.69558 | 36.73457 | 0.32426 |
| 4 | 1.16373 | 1.33858 | 28.51531 | 0.59998 | ||
| 5 | 0.66104 | 0.80524 | 15.78878 | 0.82455 | ||
| 6 | 0.64689 | 0.78769 | 13.30716 | 0.89652 | ||
| 7 | 0.62234 | 0.71074 | 9.47337 | 0.91359 |
| Threshold | Section Related to H9 | Time Steps | MAE | RMSE | MAPE | R2 |
|---|---|---|---|---|---|---|
| 0.8 | / | 3 | 1.48127 | 1.86125 | 30.61857 | 0.23653 |
| 4 | 1.22701 | 1.42535 | 25.32567 | 0.30146 | ||
| 5 | 0.68241 | 0.83008 | 14.76454 | 0.76802 | ||
| 6 | 0.67965 | 0.82055 | 13.19848 | 0.77274 | ||
| 7 | 0.66523 | 0.81516 | 12.53072 | 0.78172 | ||
| 0.7 | H6 | 3 | 1.46275 | 1.85476 | 29.59729 | 0.25606 |
| 4 | 1.12356 | 1.37632 | 23.55022 | 0.34897 | ||
| 5 | 0.66839 | 0.82769 | 13.284 | 0.77004 | ||
| 6 | 0.61092 | 0.82319 | 13.10851 | 0.78238 | ||
| 7 | 0.60939 | 0.80334 | 12.46232 | 0.79934 | ||
| 0.6 | H4 H6 | 3 | 1.45873 | 1.80834 | 31.70823 | 0.272437 |
| 4 | 1.10492 | 1.37089 | 23.86203 | 0.367155 | ||
| 5 | 0.63366 | 0.82304 | 14.44496 | 0.81392 | ||
| 6 | 0.61264 | 0.82218 | 14.5587 | 0.83497 | ||
| 7 | 0.60034 | 0.80091 | 11.53072 | 0.85034 | ||
| 0.5 | H2 H4 H6 | 3 | 1.42701 | 1.76694 | 30.44643 | 0.27749 |
| 4 | 1.10471 | 1.36167 | 24.53903 | 0.36465 | ||
| 5 | 0.62425 | 0.78569 | 12.67354 | 0.84606 | ||
| 6 | 0.58977 | 0.77932 | 11.04543 | 0.89926 | ||
| 7 | 0.56942 | 0.75345 | 9.59432 | 0.92342 |
| Threshold | Section Related to H11 | Time Steps | MAE | RMSE | MAPE | R2 |
|---|---|---|---|---|---|---|
| 0.8 | / | 3 | 1.51585 | 1.78957 | 21.30284 | 0.39355 |
| 4 | 1.21831 | 1.42137 | 16.93147 | 0.58054 | ||
| 5 | 0.67381 | 0.82084 | 10.42556 | 0.69343 | ||
| 6 | 0.64799 | 0.80493 | 9.12566 | 0.79752 | ||
| 7 | 0.62345 | 0.79238 | 8.70294 | 0.80071 | ||
| 0.7 | H8 | 3 | 1.50861 | 1.77856 | 21.14639 | 0.45469 |
| 4 | 1.17674 | 1.39735 | 16.42899 | 0.61225 | ||
| 5 | 0.68965 | 0.81455 | 10.25764 | 0.79094 | ||
| 6 | 0.66667 | 0.80497 | 9.05628 | 0.74576 | ||
| 7 | 0.61225 | 0.75934 | 8.57453 | 0.83634 | ||
| 0.6 | H8 H9 | 3 | 1.48741 | 1.74551 | 20.91039 | 0.48333 |
| 4 | 1.12575 | 1.33582 | 15.97794 | 0.67957 | ||
| 5 | 0.65062 | 0.80676 | 10.17630 | 0.79775 | ||
| 6 | 0.62077 | 0.79132 | 8.80699 | 0.83894 | ||
| 7 | 0.60225 | 0.76385 | 8.53494 | 0.85846 | ||
| 0.5 | H5 H8 H9 | 3 | 1.42989 | 1.76357 | 18.58104 | 0.56642 |
| 4 | 1.06954 | 1.31858 | 13.15588 | 0.69508 | ||
| 5 | 0.61793 | 0.76473 | 9.267573 | 0.85563 | ||
| 6 | 0.58345 | 0.72785 | 8.238327 | 0.89162 | ||
| 7 | 0.52425 | 0.68346 | 7.33485 | 0.92125 |
| Model | Parameter | |
|---|---|---|
| LSTM | Neuron | 12 |
| Timesteps | 5 | |
| Number of Iterations | 300 | |
| SVM | Kernel Function | Radial Basis Function |
| Penalty Factor | 0.8 | |
| Number of Iterations | 500 | |
| ARIMA | Autoregressive Terms | 2 |
| Moving average Terms | 6 | |
| Difference Items | 1 | |
| Models | Evaluation Indexes | ||||
|---|---|---|---|---|---|
| MAE | RMSE | MAPE | R2 | ||
| H3 | PCC–GRU | 0.3333 | 0.5774 | 8.1597 | 0.8799 |
| ARIMA | 0.8750 | 1.0992 | 24.2411 | 0.5647 | |
| SVM | 0.5833 | 0.7638 | 16.5972 | 0.7899 | |
| LSTM | 1.3333 | 1.5275 | 36.9792 | 0.1595 | |
| H5 | PCC–GRU | 0.3750 | 0.6124 | 7.0006 | 0.9116 |
| ARIMA | 0.9167 | 1.0801 | 21.6402 | 0.7250 | |
| SVM | 0.6667 | 0.8165 | 17.3247 | 0.8429 | |
| LSTM | 1.1250 | 1.3385 | 27.1957 | 0.5774 | |
| H9 | PCC–GRU | 0.3333 | 0.5774 | 10.7639 | 0.9063 |
| ARIMA | 0.8333 | 1.0000 | 26.6022 | 0.7188 | |
| SVM | 0.7083 | 0.8416 | 24.2640 | 0.8008 | |
| LSTM | 1.0417 | 1.3385 | 34.2758 | 0.4961 | |
| H11 | PCC–GRU | 0.3333 | 0.5774 | 5.1403 | 0.9521 |
| ARIMA | 0.9167 | 1.1902 | 14.7058 | 0.7964 | |
| SVM | 0.7083 | 0.8416 | 11.9562 | 0.8982 | |
| LSTM | 1.3750 | 1.5679 | 22.7626 | 0.6466 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, T.; Zhang, Q. Ship Traffic Flow Prediction in Wind Farms Water Area Based on Spatiotemporal Dependence. J. Mar. Sci. Eng. 2022, 10, 295. https://doi.org/10.3390/jmse10020295
Xu T, Zhang Q. Ship Traffic Flow Prediction in Wind Farms Water Area Based on Spatiotemporal Dependence. Journal of Marine Science and Engineering. 2022; 10(2):295. https://doi.org/10.3390/jmse10020295
Chicago/Turabian StyleXu, Tian, and Qingnian Zhang. 2022. "Ship Traffic Flow Prediction in Wind Farms Water Area Based on Spatiotemporal Dependence" Journal of Marine Science and Engineering 10, no. 2: 295. https://doi.org/10.3390/jmse10020295