
Design and Experiment of a Garlic Orientation and Orderly Conveying Device Based on Machine Vision


Abstract
:1. Introduction
2. Materials and Methods
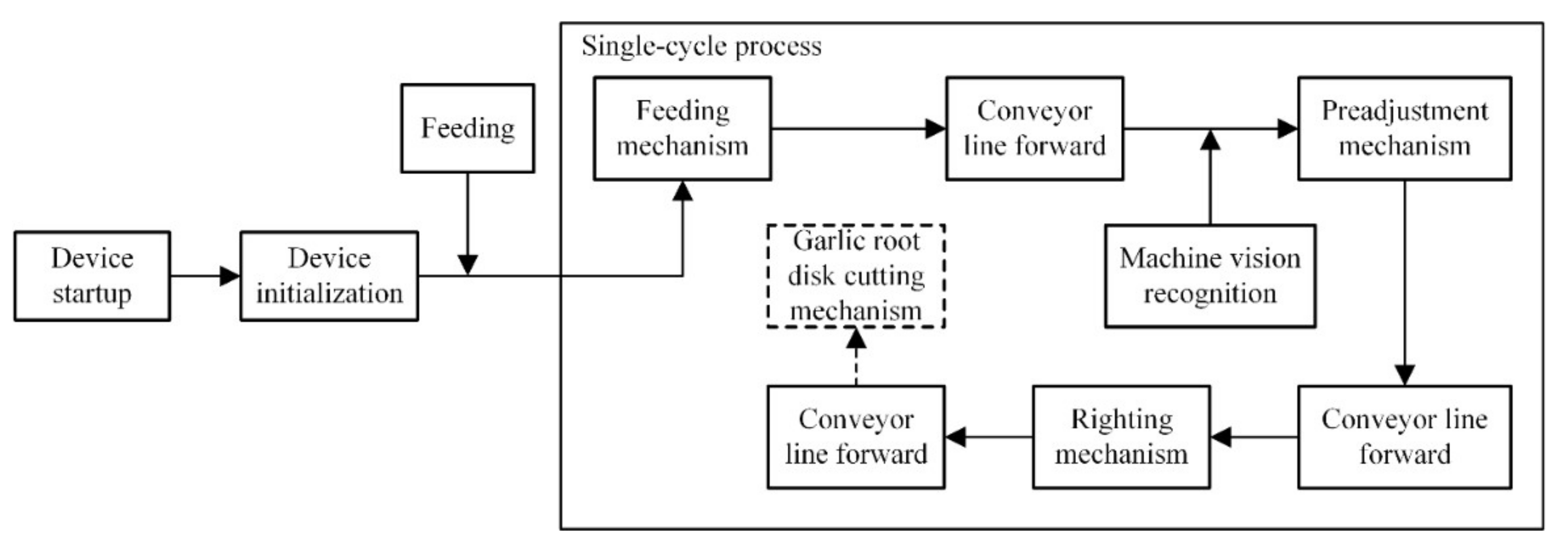
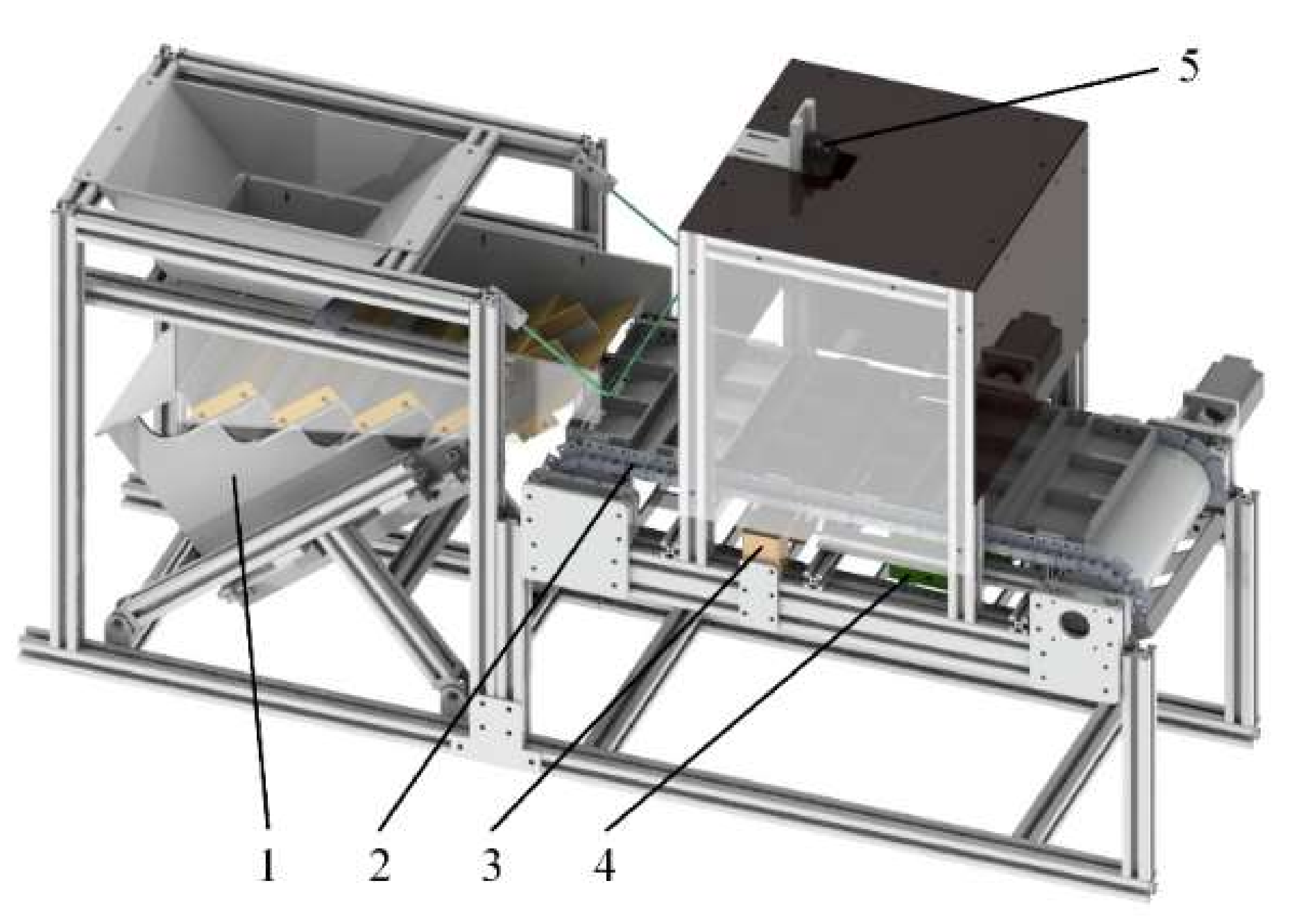
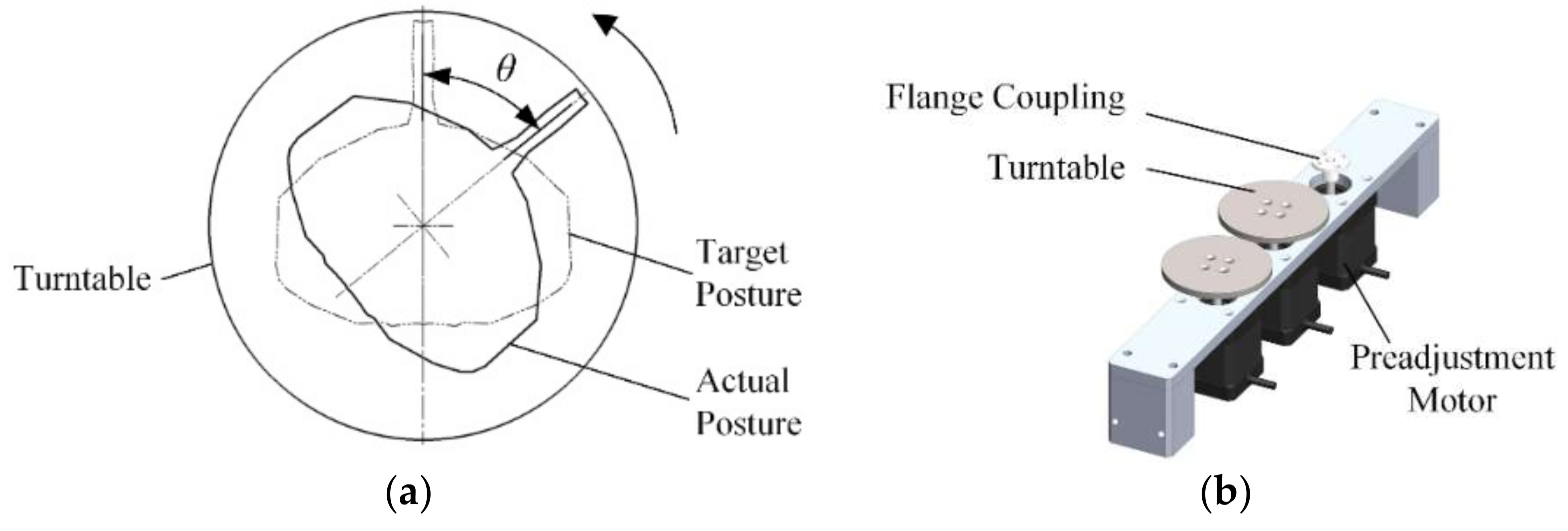
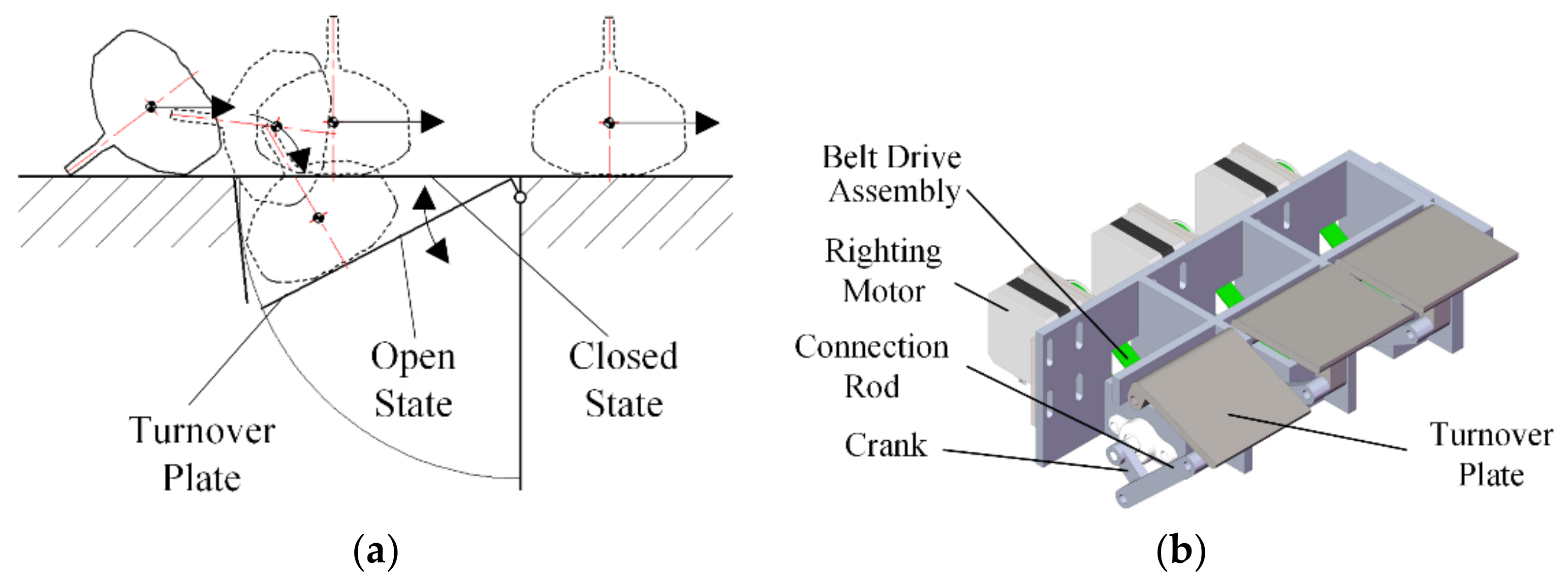
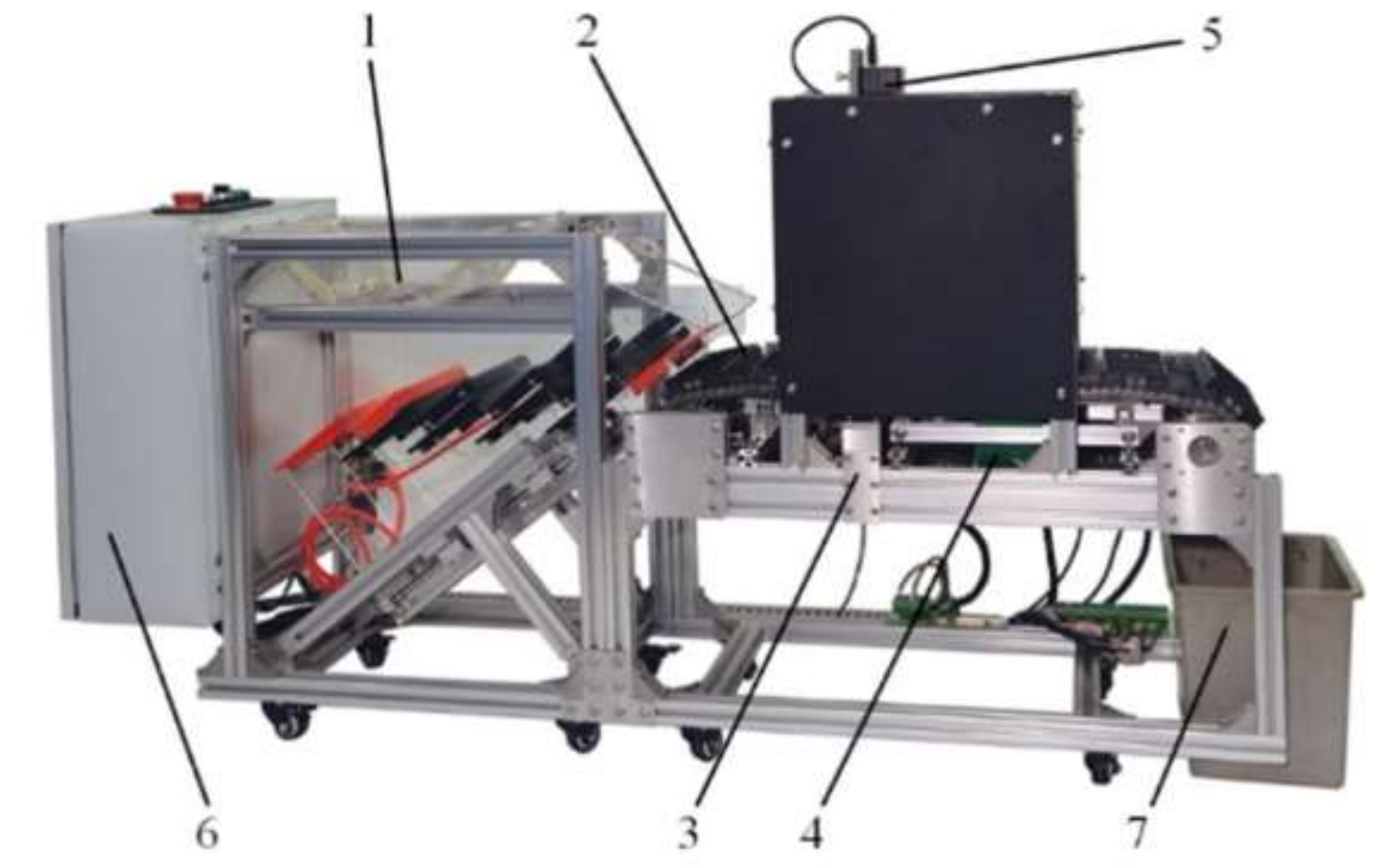
2.1. Structure and Working Principle
2.2. Design of the Garlic Posture Recognition System
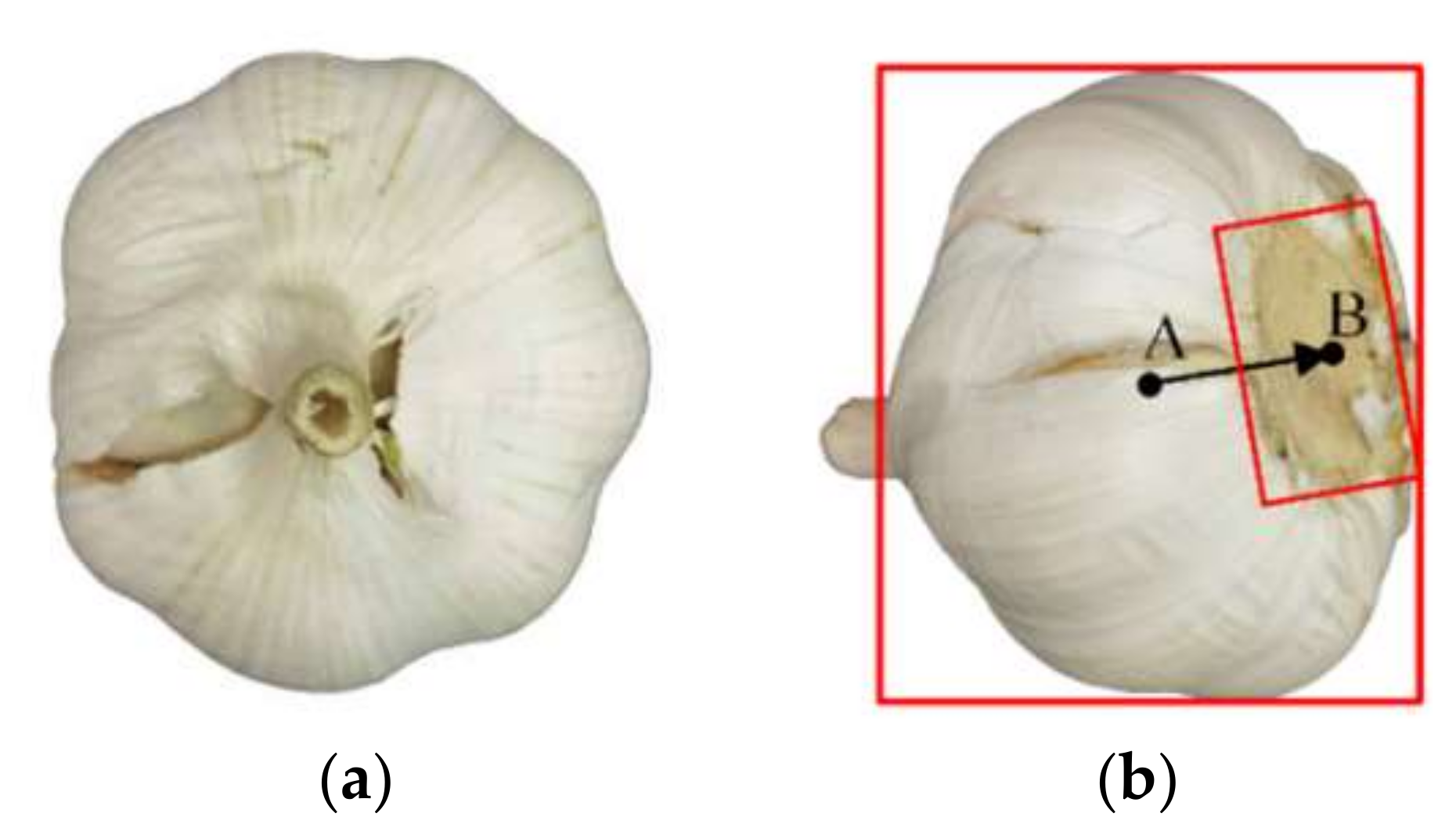
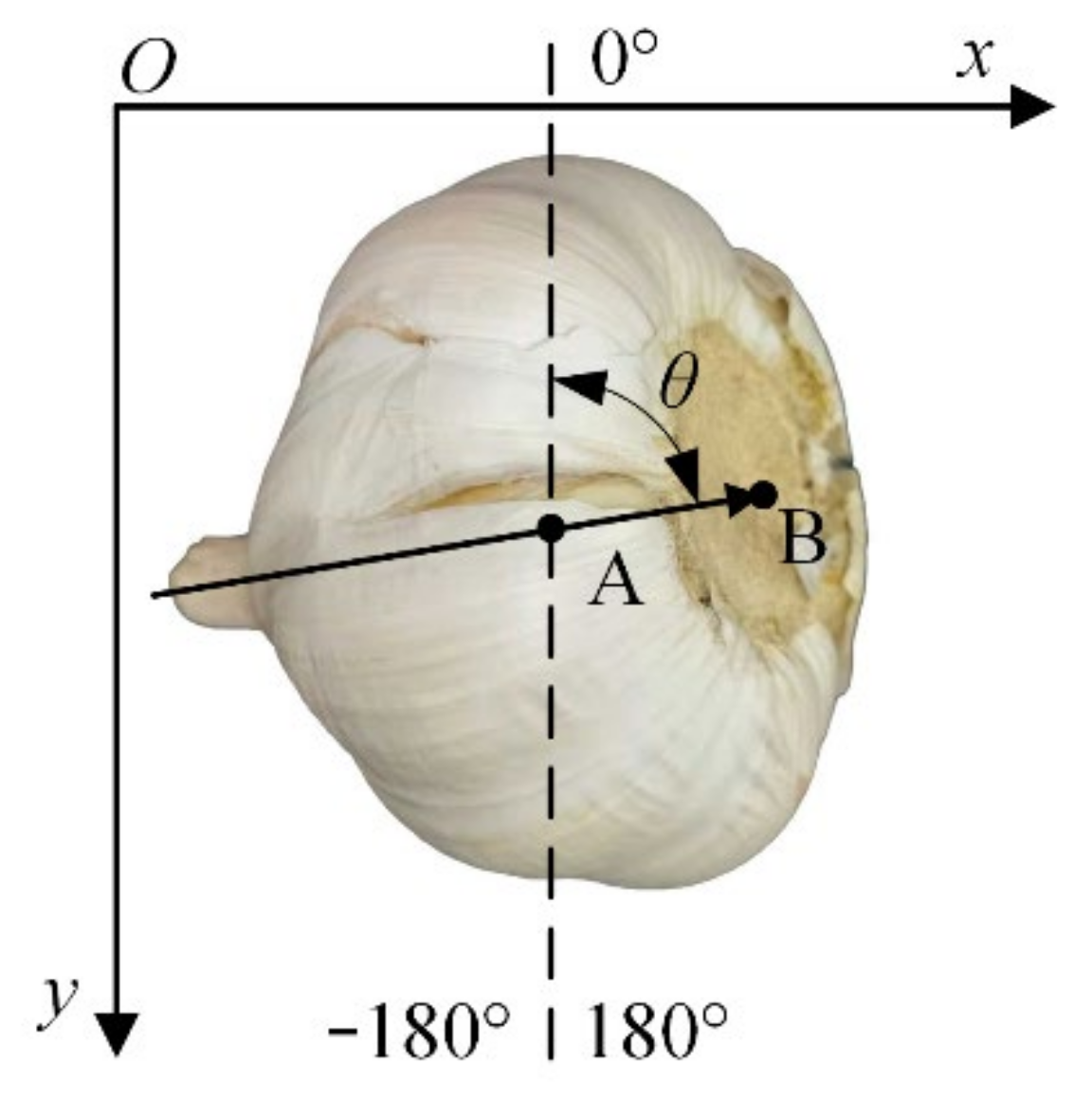
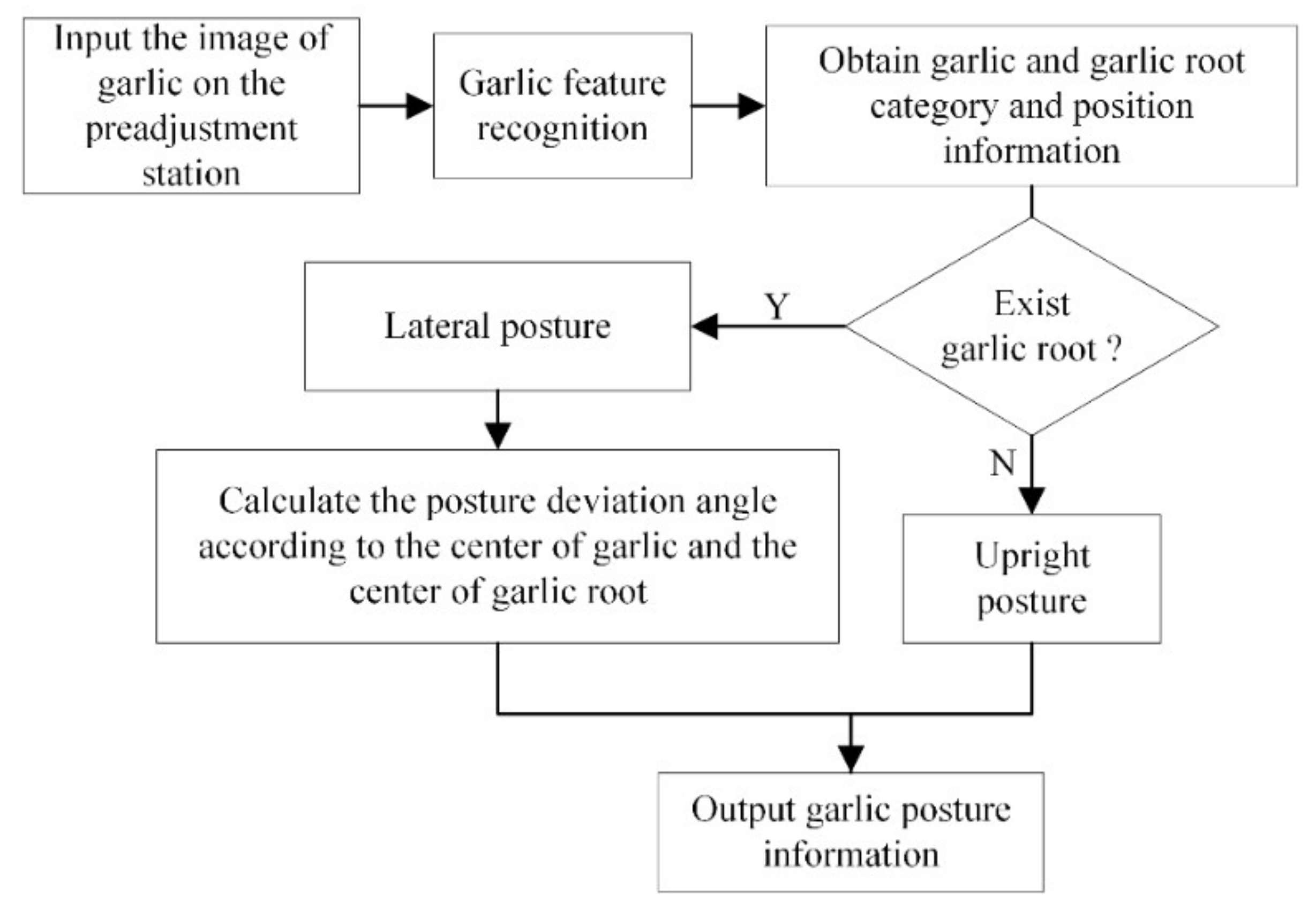
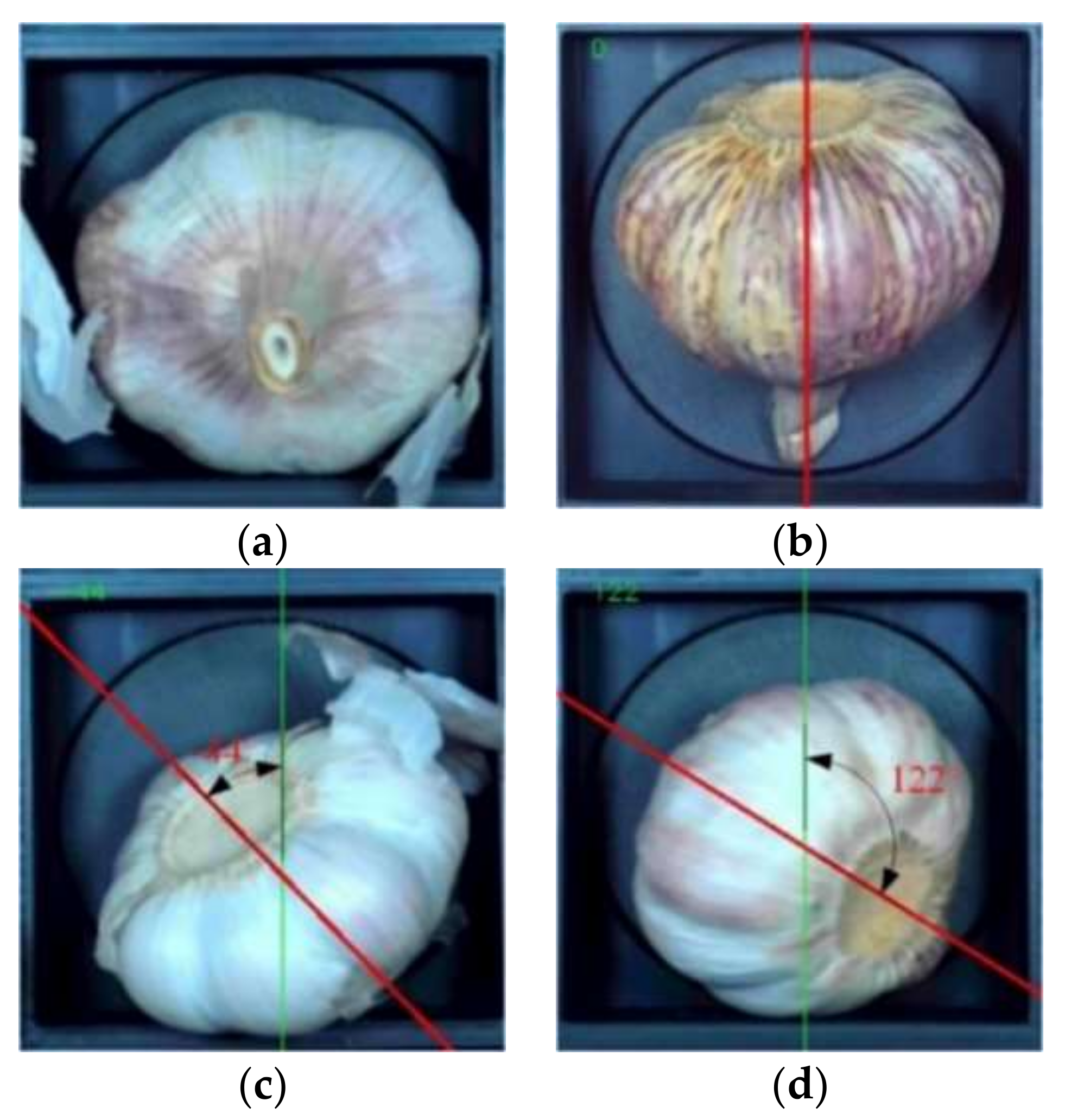
2.2.1. Principle of Garlic Posture Recognition
2.2.2. Garlic Feature Detection Model Based on YOLOv5s
- (1)
- YOLOv5s Detection PrincipleThe YOLOv5s network structure first extracts the features of garlic through the backbone network and divides the input garlic image into nonoverlapping grid cells. The grid cell located in the target center is responsible for the detection of garlic features. Each grid cell needs to predict category information and the probability of garlic features in the current grid cell is . Each grid cell generates B prediction boxes with different objectives and each prediction box contains five predicted values ( and confidence). The center coordinates, width, and height of the anchor frame are as follows.where and are the horizontal and vertical coordinate values of the upper-left corner of the grid cell, respectively; and are the width and height values of the anchor box, respectively; and are the center coordinate values, width, and height values of the prediction frame; and is the Sigmoid function.The confidence calculation formula of the prediction box is:wherewhere represents the confidence of the j prediction box in the i grid cell; represents the intersection ratio of the predicted frame and the ground-truth frame; represents the prediction box; and represents the manually annotated ground-truth box.The loss function (total_loss) in the YOLOv5s model consists of three parts: the classification loss function (cls_loss), the bounding box loss function (box_loss), and the confidence loss function (obj_loss). BCE_Loss is used to calculate the class probability and the loss of the target confidence score and CIOU_Loss is used to calculate the bounding box loss. Finally, the candidate frame with the highest confidence is extracted from the candidate prediction frames by the non-maximum suppression algorithm to determine the information in the final target detection frame.
- (2)
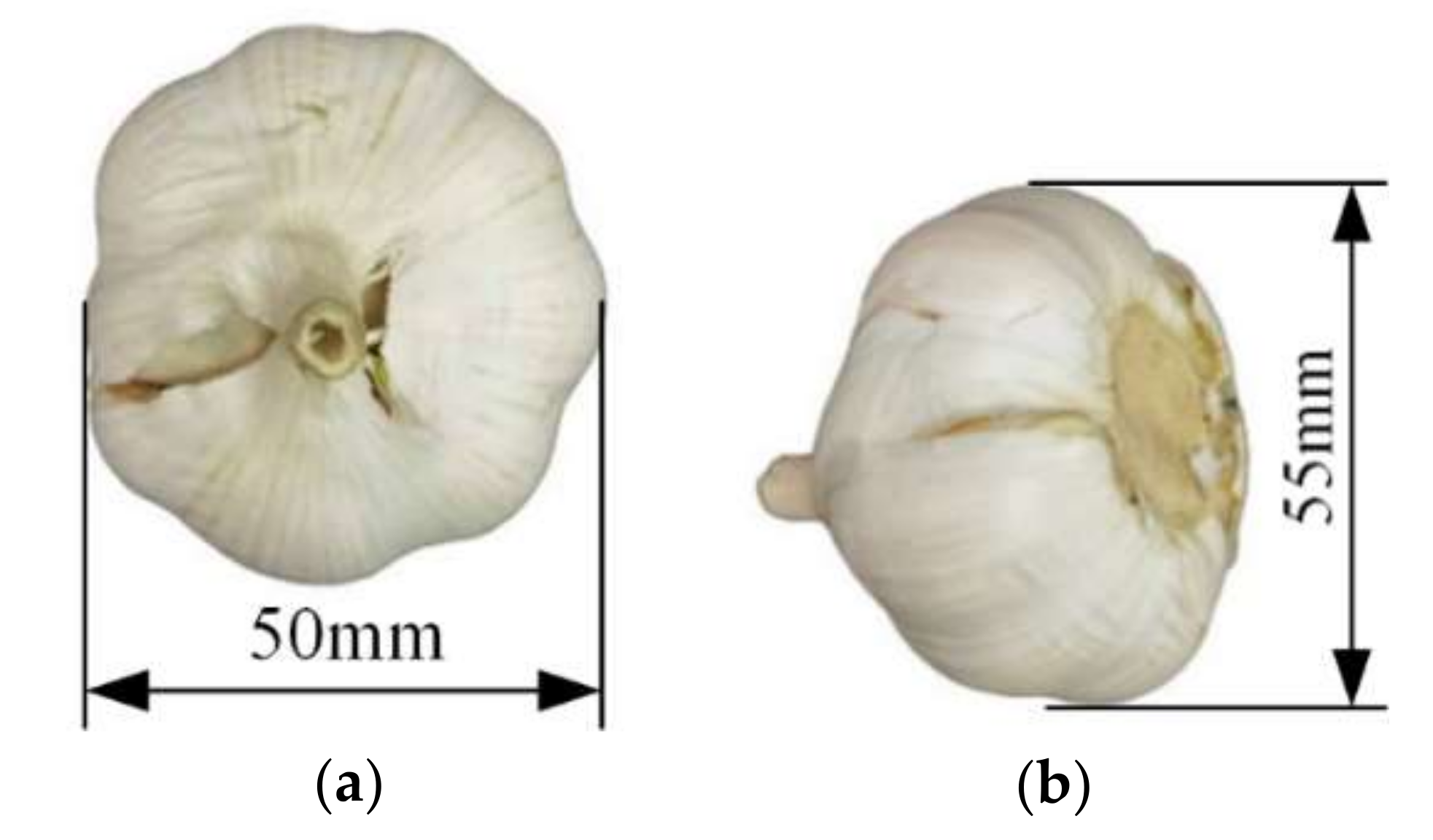
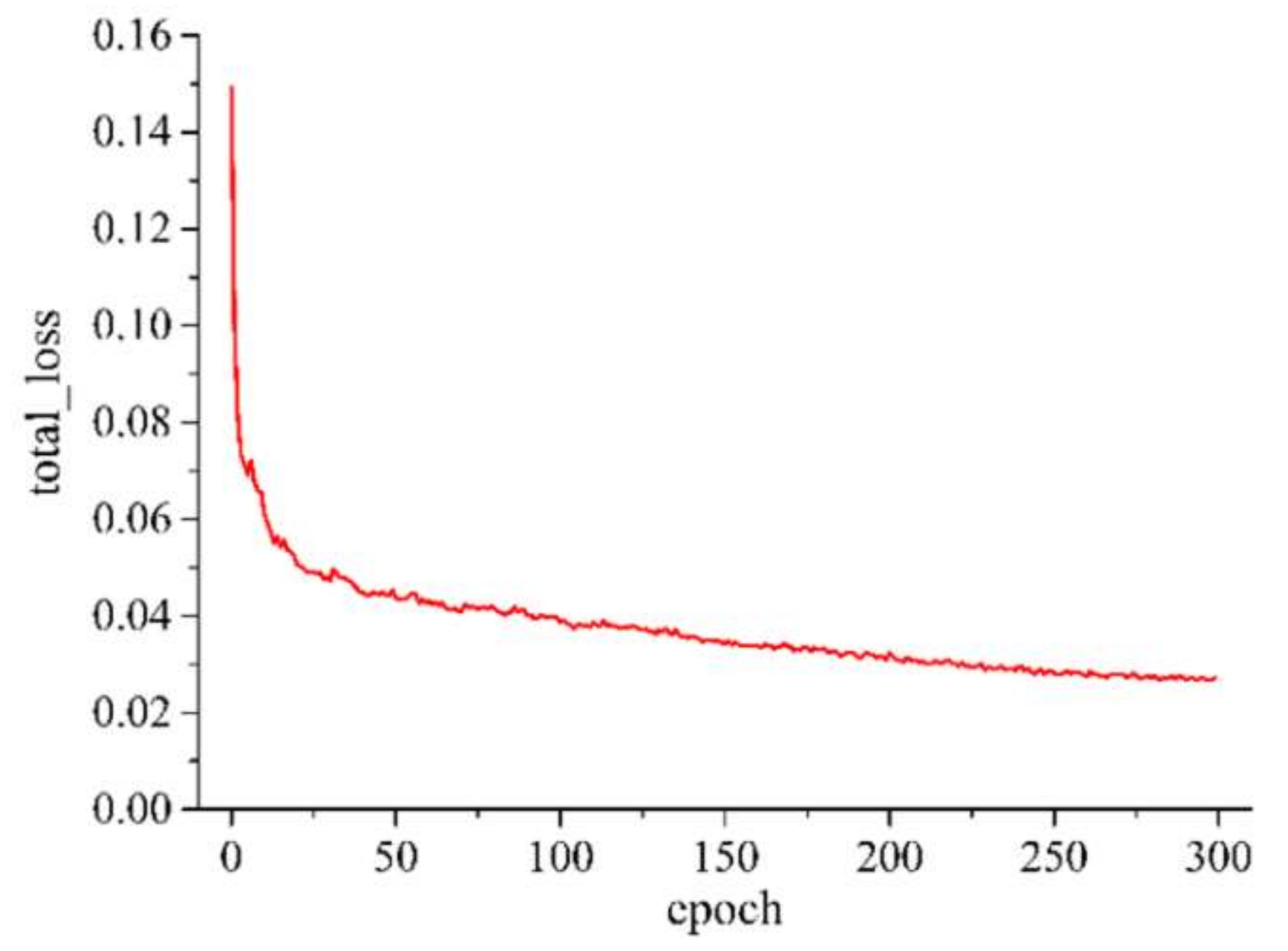
- Model TrainingThe screened garlic from Shandong is taken as the research object. In practical applications, garlic damage and the occlusion of broken skin are the key factors that affect the robustness of the garlic feature detection model. Therefore, the images collected in this paper include images of garlic under normal conditions, images of garlic under different damage conditions, and images of garlic occluded by broken skin. In total, 505 images were collected and 2020 images were generated using rotation, brightness, saturation, and exposure changes for the garlic feature recognition dataset.The garlic feature detection training environment in this paper is based on the Windows 10 operating system and the computer processor used for model training is Intel(R) Xeon(R) Sliver 4110 CPU@2.10 GHz (2 CPU). The running memory is 64 GB, the storage memory is 4 TB, the GPU is NVIDIA Quadro P2000, and the graphics card driver version is NVIDIA 471.41 and CUDA version 10.0.130. The construction and training of the garlic feature detection model based on YOLOv5s is completed under Python 3.6.8 and PyTorch. The maximum number of iterations (epochs) during model training is set to 300 and the batch size is set to 16. Figure 10 shows the training loss curve of the YOLOv5s model. As the number of iterations increases, the total loss of the model basically converges to a stable value.
2.3. Evaluation Indicators of Garlic Posture Recognition and Garlic Feeding Tests
3. Results and Discussion
3.1. Garlic Posture Recognition Test
3.2. Garlic Feeding Test
4. Conclusions
- (1)
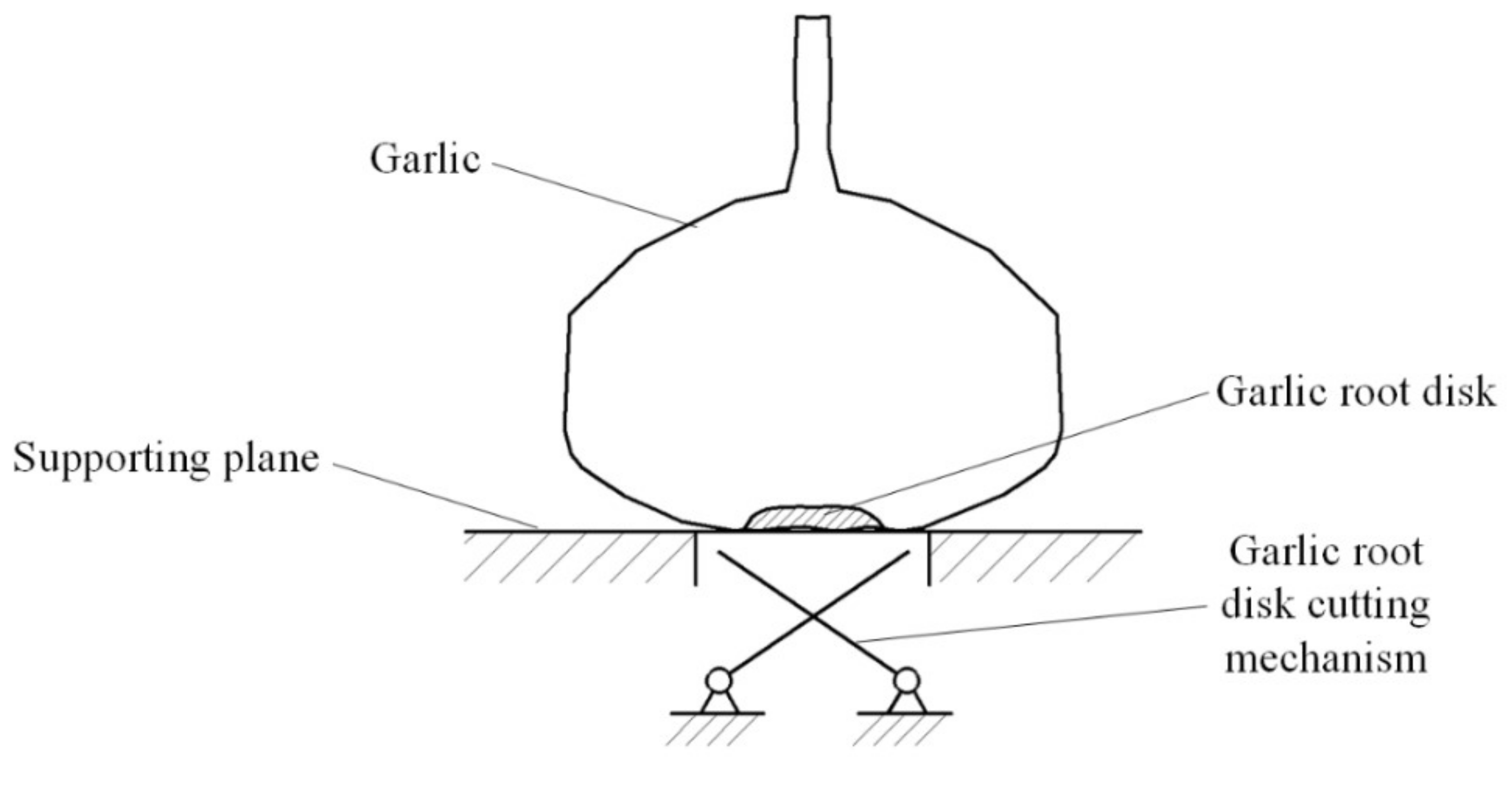
- Taking the cold-stored dry garlic after cutting fiber as the object, an orientation and orderly conveying device for garlic root cutting was proposed. The automatic orientation and orderly conveying of garlic was realized by using the feature that the gravitational center of garlic is close to the garlic root and combined with machine vision technology. The problem of the poor automatic orientation effect of stemless garlic was solved. Compared with the existing vibration feeding methods, the conveying efficiency was significantly improved. At the same time, it provides a new idea for the orientation and conveying of bulb crops, such as garlic, and provides technical support for the development of garlic-related equipment.
- (2)
- A garlic posture recognition method based on garlic feature detection was proposed by using machine vision technology. The garlic feature was detected by the YOLOv5s model and garlic posture recognition was realized. The training results show that the YOLOv5s model can effectively learn garlic image features. The problem of garlic posture recognition in the garlic orientation process was solved. The success rate of posture recognition of the garlic posture recognition algorithm based on YOLOv5s is 98.67% and the average accuracy rate of the garlic deviation angle is 99.11%. Compared with the traditional HSV model, the success rate of posture recognition and the average accuracy rate of the garlic deviation angle are increased by 30.67% and 32.09%, respectively. It can be concluded that the garlic posture recognition algorithm based on YOLOv5s can effectively recognize the posture of garlic, which can meet the design requirements of the garlic preadjustment mechanism for garlic posture recognition.
- (3)
- A garlic orientation and orderly conveying device for garlic root cutting was developed, which realized the automatic orientation and orderly conveying of garlic and can adapt to the feeding operation of garlic, with and without stems. Through the garlic orientation and orderly conveying test, the optimal operating parameters of the whole machine were determined. The conveying speed is 95 and the rotational speed of the turntable is 55 rpm. Under this set of parameters, the orientation success rate is 95.6%, the conveying efficiency is 75 per minute, and the single-channel production beat is 2.4 s. Compared with the double-channel automatic garlic shredder and the eight-channel intelligent garlic automatic root-cutting machine, mentioned in references [22,23], the single-channel production beat of this paper is improved by 0.6 s and 0.4 s, respectively, which proves that the conveying efficiency of the garlic orientation and orderly conveying device is high.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, B.; Zong, Y.; Zhao, B. Measurement of the international competitiveness of China’s garlic industry and its influencing factors. Agric. Outlook 2019, 15, 113–117. [Google Scholar] [CrossRef]
- Yang, X. Industrial status and development countermeasures of garlic industry in China. Chin. Fruit Veg. 2020, 40, 57–59. [Google Scholar] [CrossRef]
- Chen, J.; Zhou, Y.; Jia, J.; Chen, T.; Cai, S.; Yu, C. Optimum design of precise root cutting mechanism based on characteristics of garlic root disk. Acta Agric. Zhejiangensis 2021, 33, 2174–2184. [Google Scholar] [CrossRef]
- Yu, Z.; Hu, Z.; Yang, K.; Peng, B.; Wu, F.; Xie, H. Design and experiment of root cutting device in garlic combine harvesting. Trans. Chin. Soc. Agric. Eng. 2016, 32, 77–85. [Google Scholar] [CrossRef]
- Chen, J.; Zhou, B.; Jia, J.; Chen, Z.; Cai, S. Design and parameters optimization of root cutting tool based on garlic numerical simulation model. J. Food Process Eng. 2021, 44, e13753. [Google Scholar] [CrossRef]
- Yu, Z.; Hu, Z.; Yang, K.; Peng, B.; Zhang, Y.; Yang, M. Operation mechanism analysis and parameter optimization of garlic root floating cutting device. Trans. Chin. Soc. Agric. Mach. 2021, 52, 111–119. [Google Scholar] [CrossRef]
- Li, C.; Feng, R.; Xu, H.; Sun, Q.; Song, J.; Jin, C. Research status and prospect of garlic seed classifier. J. Chin. Agric. Mech. 2021, 42, 91–96. [Google Scholar] [CrossRef]
- Chen, Y.; Chao, K.; Kim, M. Machine vision technology for agricultural applications. Comput. Electron. Agric. 2002, 36, 173–191. [Google Scholar] [CrossRef] [Green Version]
- Sofu, M.; Er, O.; Kayacan, M.; Cetisli, B. Design of an automatic apple sorting system using machine vision. Comput. Electron. Agric. 2016, 127, 395–405. [Google Scholar] [CrossRef]
- Azarmdel, H.; Mohtasebi, S.; Jafari, A.; Muñoz, A. Developing an orientation and cutting point determination algorithm for a trout fish processing system using machine vision. Comput. Electron. Agric. 2019, 162, 613–629. [Google Scholar] [CrossRef]
- Chen, Z.; He, L.; Ye, Y.; Chen, J.; Wang, R. Automatic sorting of fresh tea leaves using vision-based recognition method. J. Food Process Eng. 2020, 43, e13474. [Google Scholar] [CrossRef]
- Shang, Z.; Zhang, H.; Zeng, C.; Yue, M.; Zhao, Q. Automatic orientation method and experiment of fructus aurantii based on machine vision. J. Chin. Agric. Mech. 2019, 40, 119–124. [Google Scholar] [CrossRef]
- Li, G.; Gu, K.; Zhao, M. Method and experiment on automatic orientation of slice sampling for corn seed. Trans. Chin. Soc. Agric. Eng. 2016, 32, 40–47. [Google Scholar] [CrossRef]
- Hou, J.; Tian, L.; Li, T.; Niu, Z.; Li, Y. Design and experiment of test bench for garlic bulbil adjustment and seeding based on bilateral image identification. Trans. Chin. Soc. Agric. Eng. 2020, 36, 50–58. [Google Scholar] [CrossRef]
- Yang, Q. An approach to apple surface feature detection by machine vision. Comput. Electron. Agric. 1994, 11, 249–264. [Google Scholar] [CrossRef]
- Unay, D.; Gosselin, B.; Kleynen, O.; Leemans, V.; Destain, M.; Debeir, O. Automatic grading of bi-colored apples by multispectral machine vision. Comput. Electron. Agric. 2011, 75, 204–212. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Wu, Y.; Li, T.; Niu, Z.; Hou, J. Design and experiment of adjustment device based on machine vision for garlic clove direction. Comput. Electron. Agric. 2020, 174, 105513. [Google Scholar] [CrossRef]
- Zhou, J.; Jiang, P.; Zou, A.; Chen, X.; Hu, W. Ship target detection algorithm based on improved YOLOv5. J. Mar. Sci. Eng. 2021, 9, 908. [Google Scholar] [CrossRef]
- Yao, J.; Qi, J.; Zhang, J.; Shao, H.; Yang, J.; Li, X. A real-time detection algorithm for kiwifruit defects based on YOLOv5. Electronics 2021, 10, 1711. [Google Scholar] [CrossRef]
- Fan, Y.; Zhang, S.; Feng, K.; Qian, K.; Wang, Y.; Qin, S. Strawberry maturity recognition algorithm combining dark channel enhancement and YOLOv5. Sensors 2022, 22, 419. [Google Scholar] [CrossRef]
- Lyu, S.; Li, R.; Zhao, Y.; Li, Z.; Fan, R.; Liu, S. Green citrus detection and counting in orchards based on YOLOv5-CS and AI edge system. Sensors 2022, 22, 576. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Xin, L.; Xin, L. Fully Automatic Garlic Root Cutting Machine. Chinese: ZL201910697479.1. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?dbcode=SCPD&dbname=SCPD2019&filename=CN110547490A&uniplatform=NZKPT&v=W8XFteGX4tI3HWSrXsZya63Wk6msh-c7GEuOAZuOnNIjFBc5FfAV1qooTcIhgRiG. (accessed on 10 December 2019).
- Zhang, H.; Yang, Y.; You, W.; Zhang, C. An Intelligent Garlic Automatic Root Cutter. Chinese: ZL201720808945.5. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?dbcode=SCPD&dbname=SCPD2018&filename=CN207125299U&uniplatform=NZKPT&v=vPtL03fkF96E6fAT5N1J2DLA2iX5iFq0wSFVmqhbdqDiSdj5gW_kOKgd1aalVv_v. (accessed on 23 March 2018).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Total Garlic Images | Actual | Recognized | Correctly Recognized | Success Rate (%) | Accuracy Rate (%) | ||||
|---|---|---|---|---|---|---|---|---|---|---|
| A | B | A | B | A | B | Angle of Deviation | ||||
| YOLOv5s | 300 | 184 | 116 | 188 | 112 | 184 | 112 | 111 | 98.67 | 99.11 |
| Traditional method | 132 | 168 | 110 | 94 | 63 | 68.0 | 67.02 | |||
| No. | Conveying Speed (mm·s−1) | Rotation Speed of Turntable (rpm) | Orientation Success Rate (%) |
|---|---|---|---|
| 1 | 85 | 50 | 86.7 |
| 2 | 85 | 55 | 91.3 |
| 3 | 85 | 60 | 81.3 |
| 4 | 95 | 50 | 86 |
| 5 | 95 | 55 | 95.6 |
| 6 | 95 | 60 | 80 |
| 7 | 105 | 50 | 90.7 |
| 8 | 105 | 55 | 87.3 |
| 9 | 105 | 60 | 76.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Yu, C.; Yao, K.; Zhou, Y.; Zhou, B. Design and Experiment of a Garlic Orientation and Orderly Conveying Device Based on Machine Vision. Agriculture 2022, 12, 1077. https://doi.org/10.3390/agriculture12081077
Chen J, Yu C, Yao K, Zhou Y, Zhou B. Design and Experiment of a Garlic Orientation and Orderly Conveying Device Based on Machine Vision. Agriculture. 2022; 12(8):1077. https://doi.org/10.3390/agriculture12081077
Chicago/Turabian StyleChen, Jianneng, Chennan Yu, Kun Yao, Yun Zhou, and Binsong Zhou. 2022. "Design and Experiment of a Garlic Orientation and Orderly Conveying Device Based on Machine Vision" Agriculture 12, no. 8: 1077. https://doi.org/10.3390/agriculture12081077