
Cyberphysical System Modeled with Complex Networks and Hybrid Automata to Diagnose Multiple and Concurrent Faults in Manufacturing Systems

Abstract
:1. Introduction
2. Background
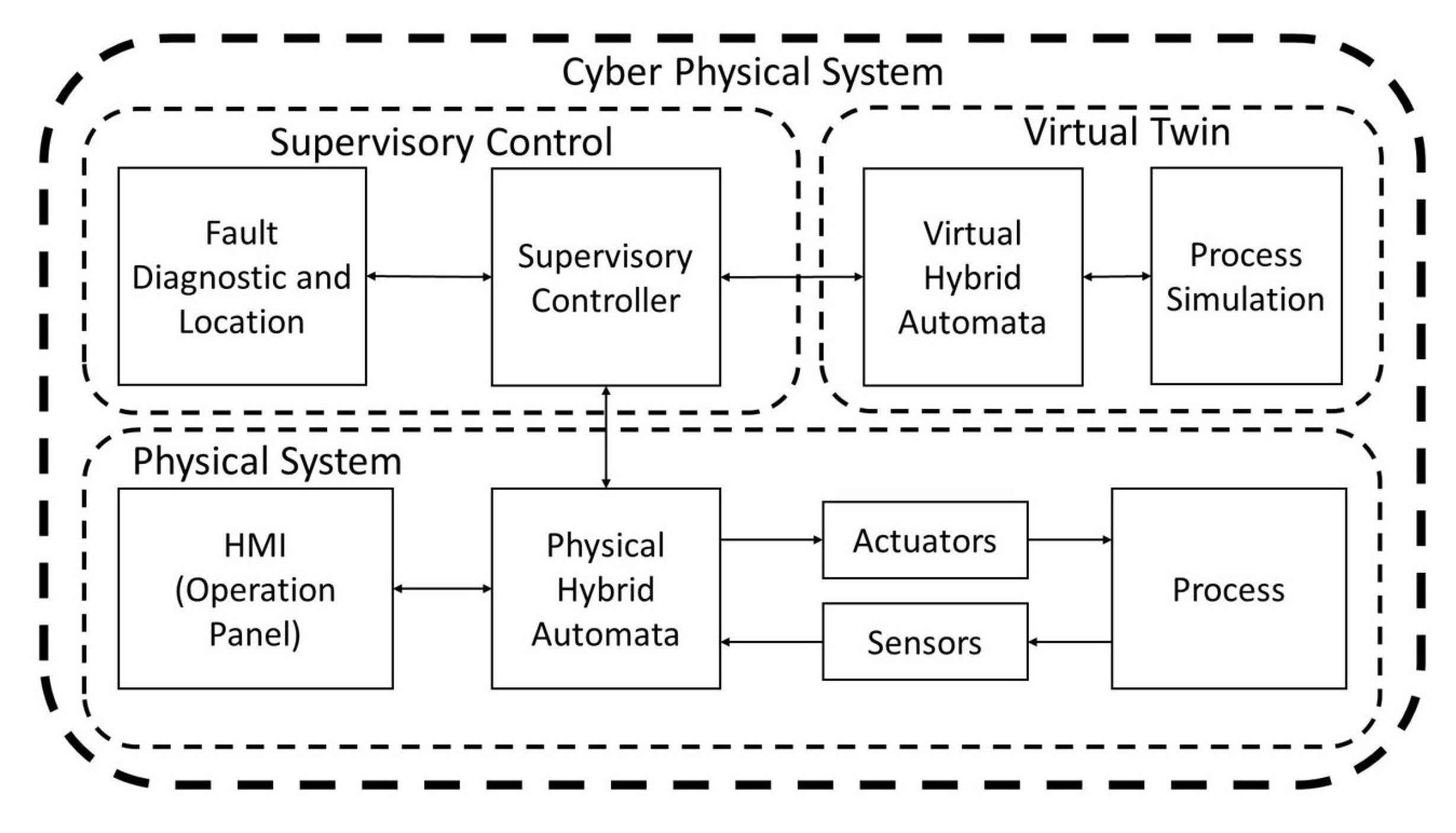
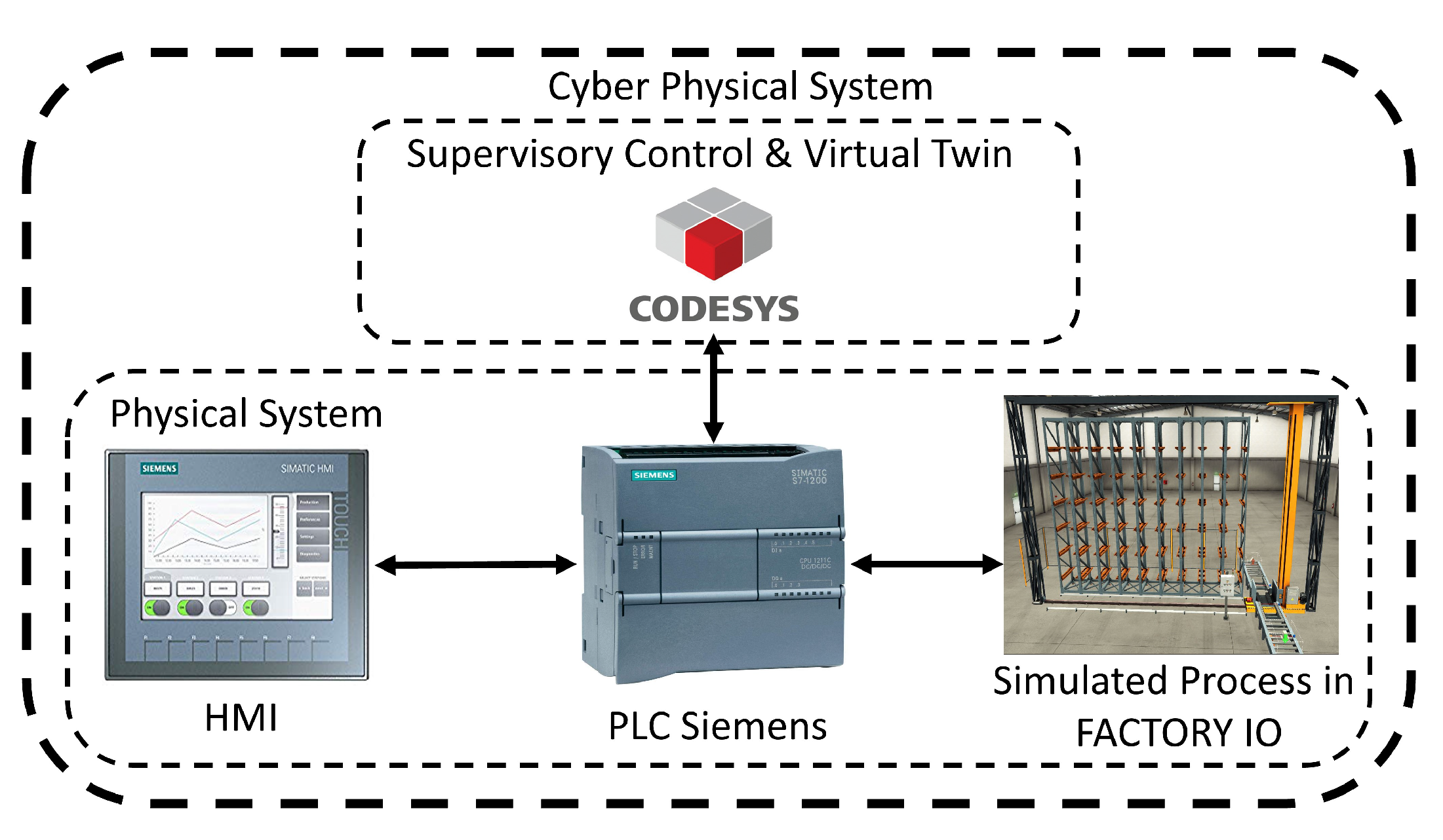
2.1. Cyber–Physical Systems
2.2. Hybrid Systems
2.3. Hybrid Automata
is a finite set of discrete states;
represents the state space of the continuous state variables;
assigns to each discrete state an analytic vector field
is the set of initial states;
assigns to each state a set called the invariant set;
is the set of discrete transitions;
assigns to each discrete transition a guard set ;
is a reset map.
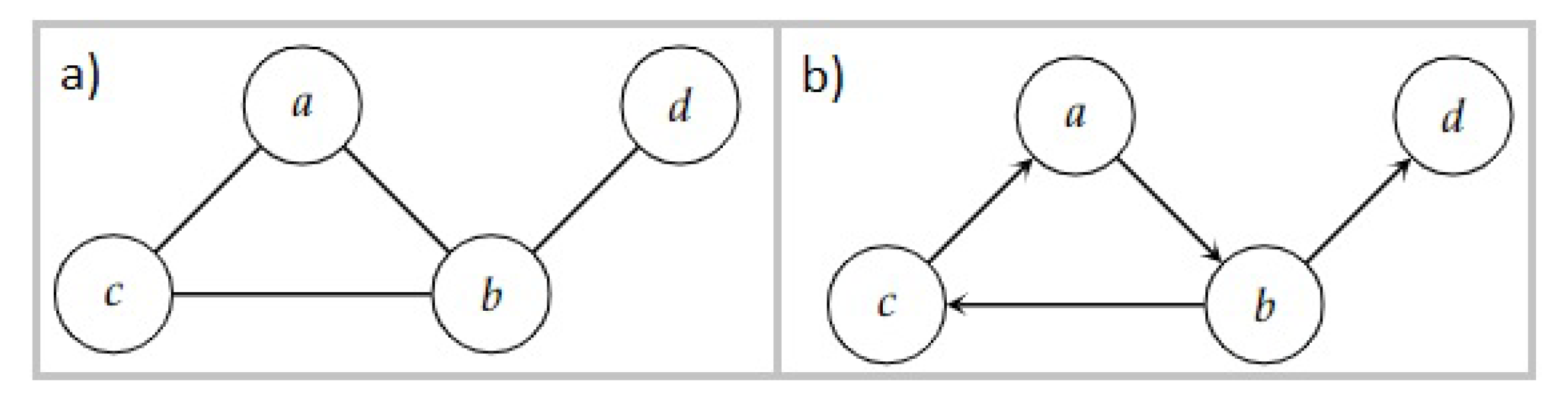
2.4. Complex Networks
3. Matherial and Methods
3.1. Cyber–Physical System Components
3.2. Cyber–Physical System Implementation
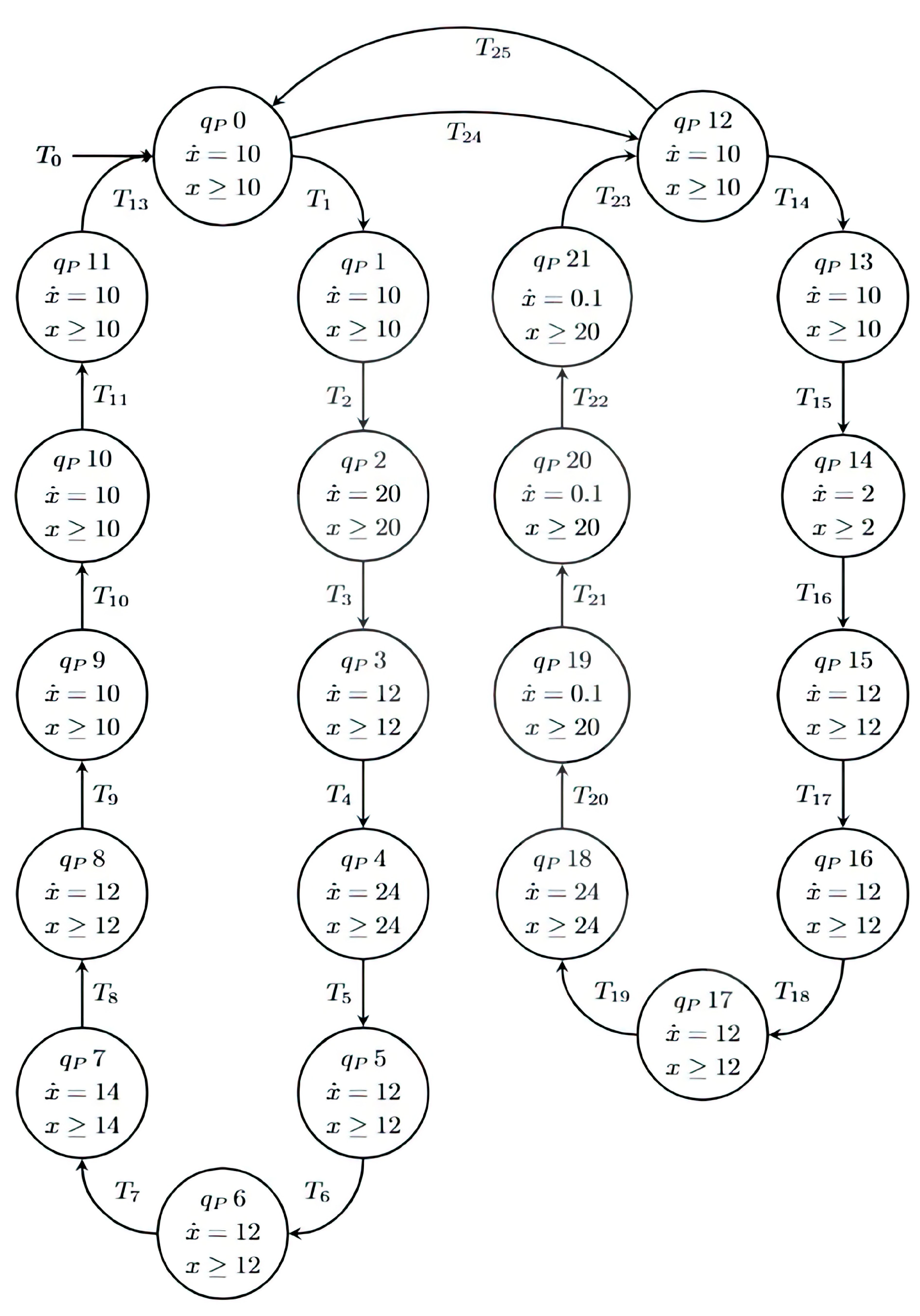
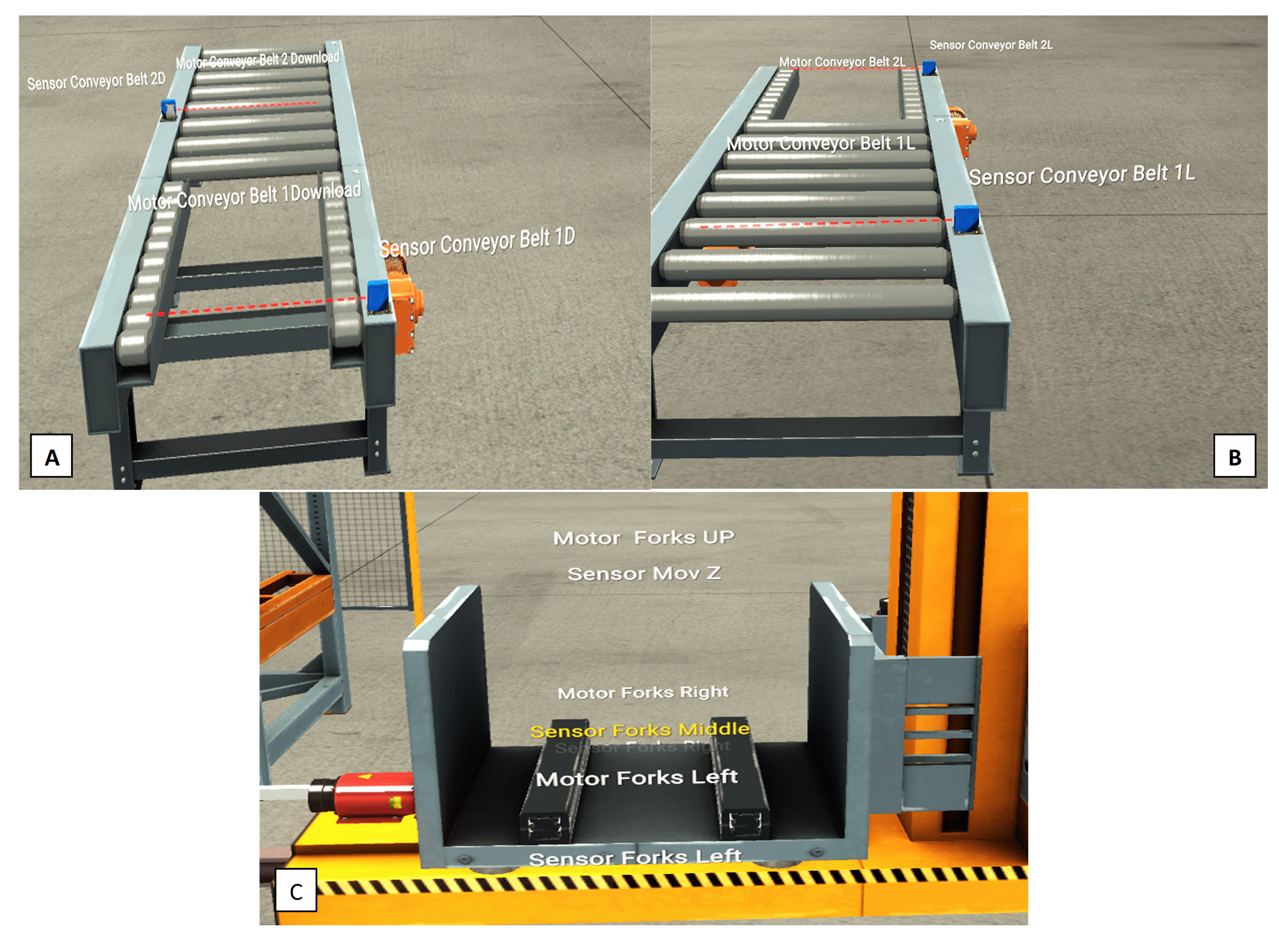
3.3. Physical Hybrid Model of Warehouse Operation
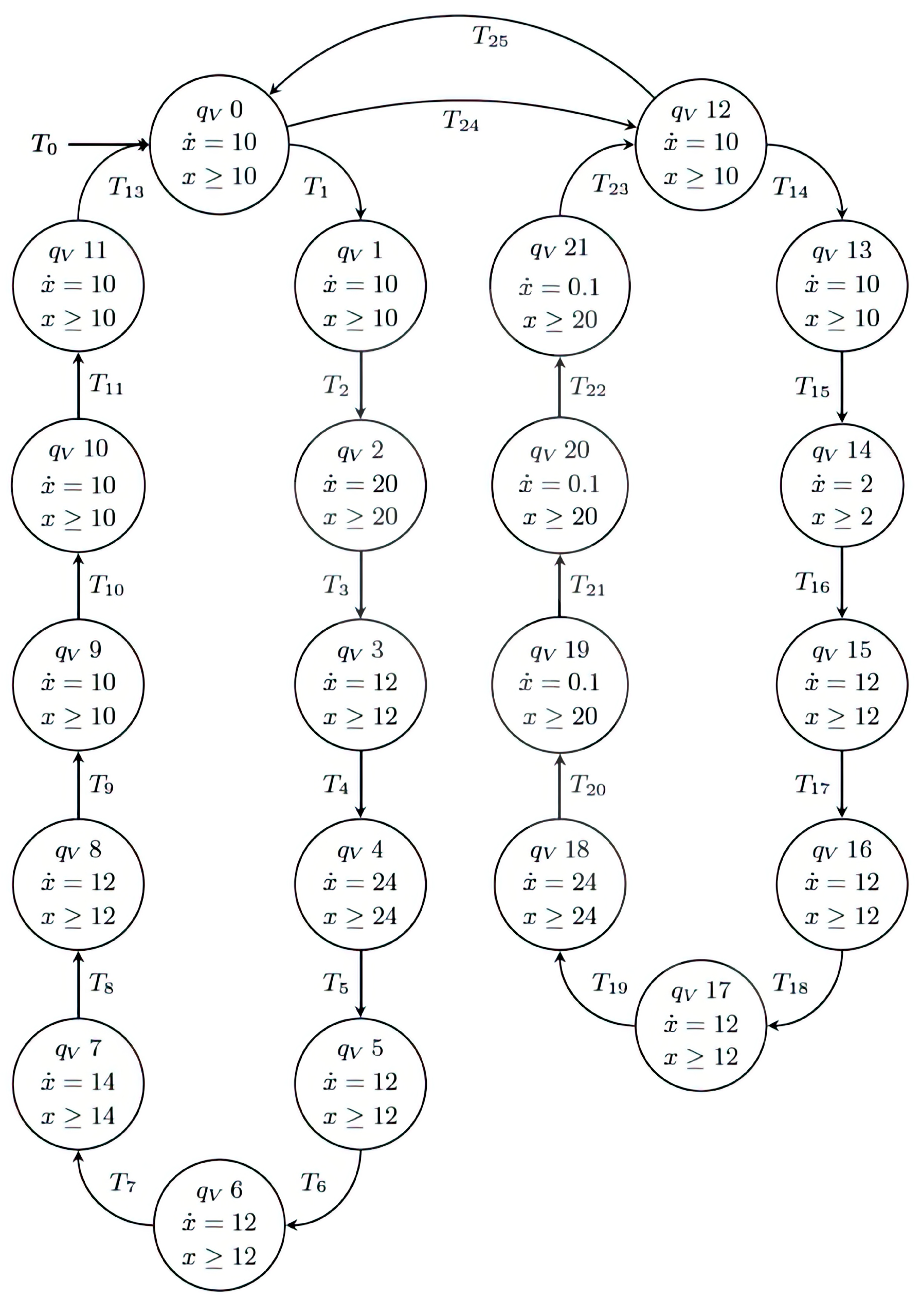
3.4. Digital Hybrid Warehouse Operation Model
3.5. Complex Network of Automated Warehouse
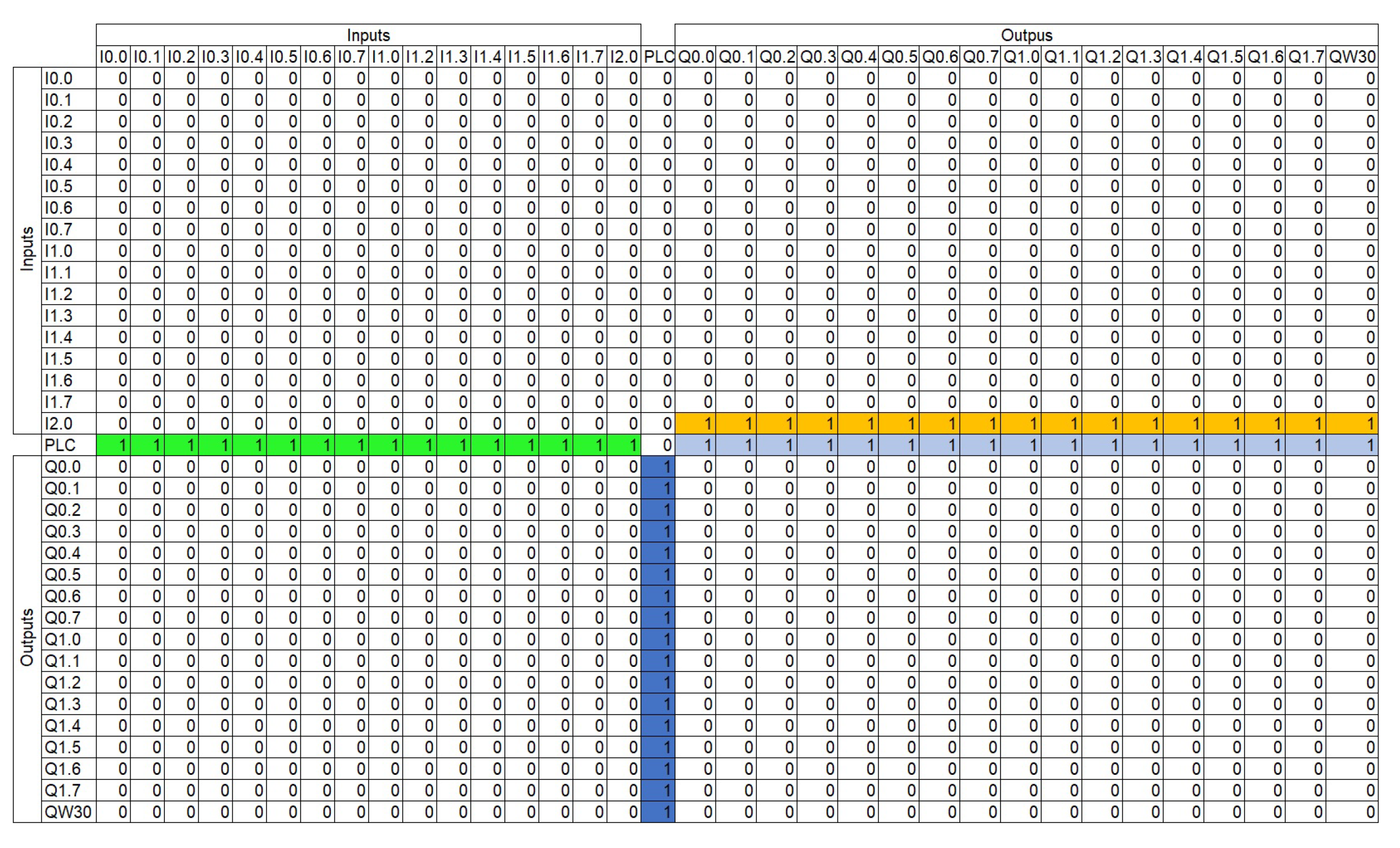
Construction of Adjacency Matrix
3.6. Data Models and Equations
3.6.1. Digital Data Model
3.6.2. Analog Data Model
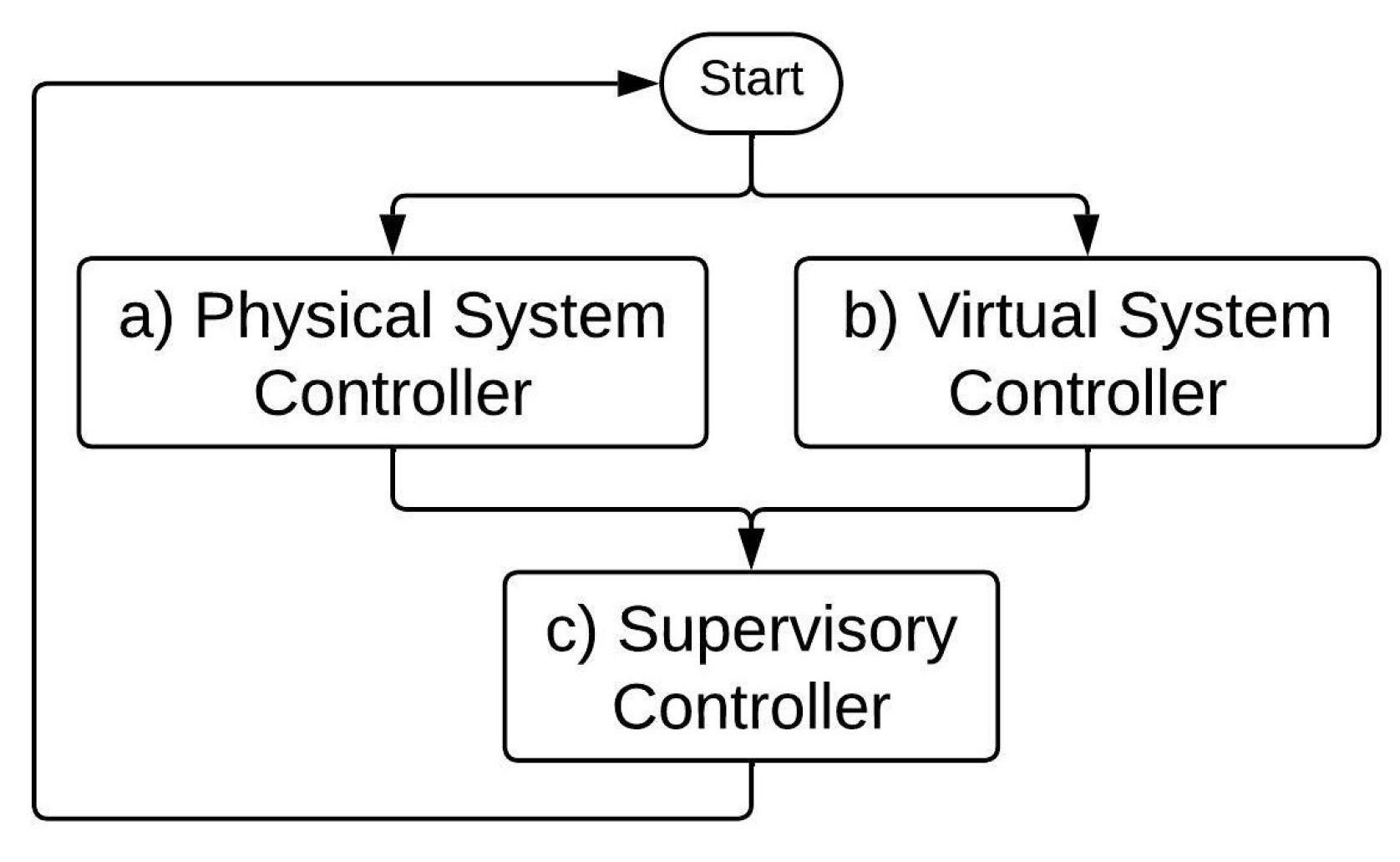
3.7. Development of the System
3.7.1. Physical System Development
| Algorithm 1: Development of the digital and analog physical system: |
 |
3.7.2. Virtual System Development
| Algorithm 2: Development of the digital and analog virtual system: |
 |
3.7.3. Digital Control Operation and Fault Diagnosis
| Algorithm 3: Development of the digital control |
 |
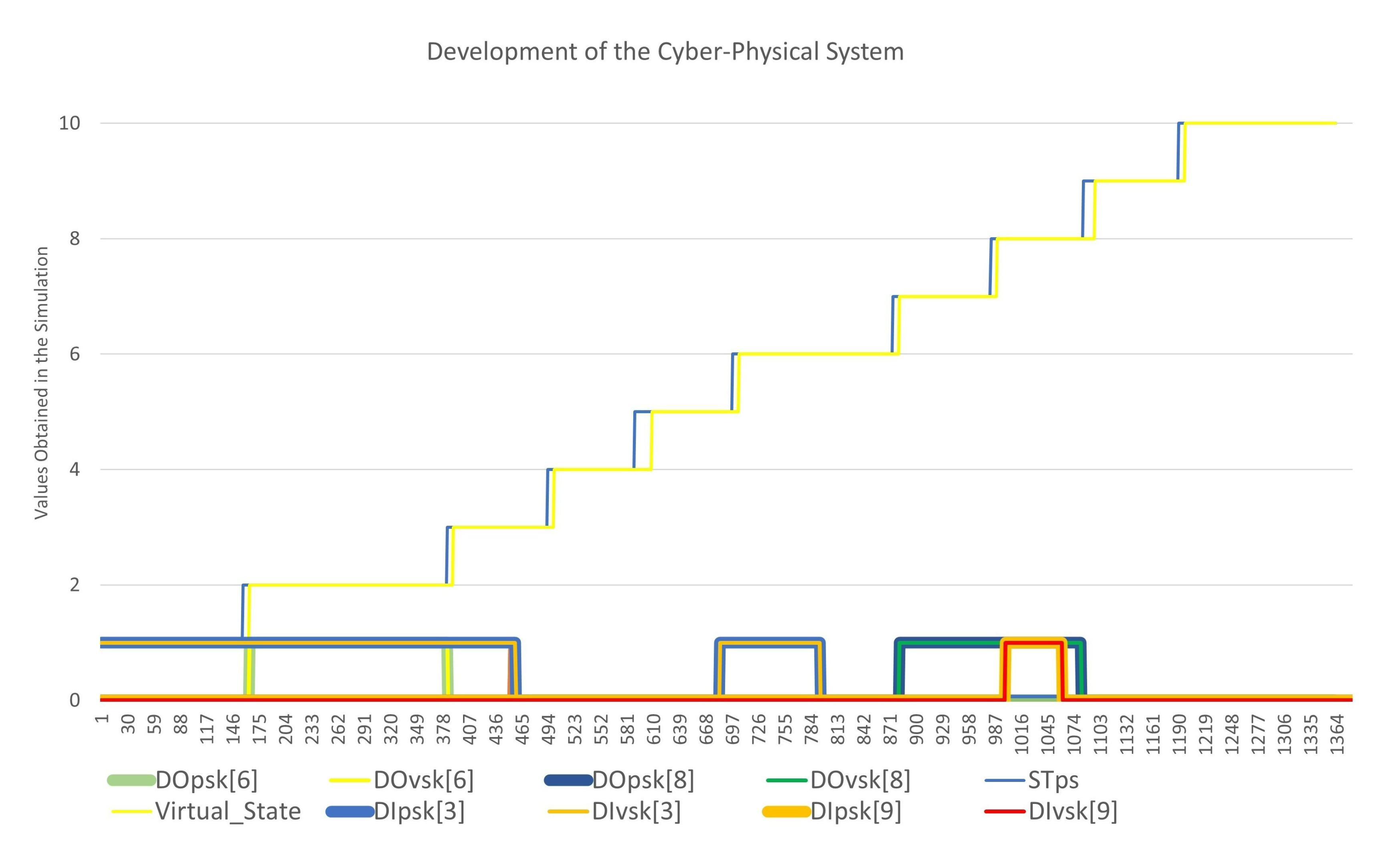
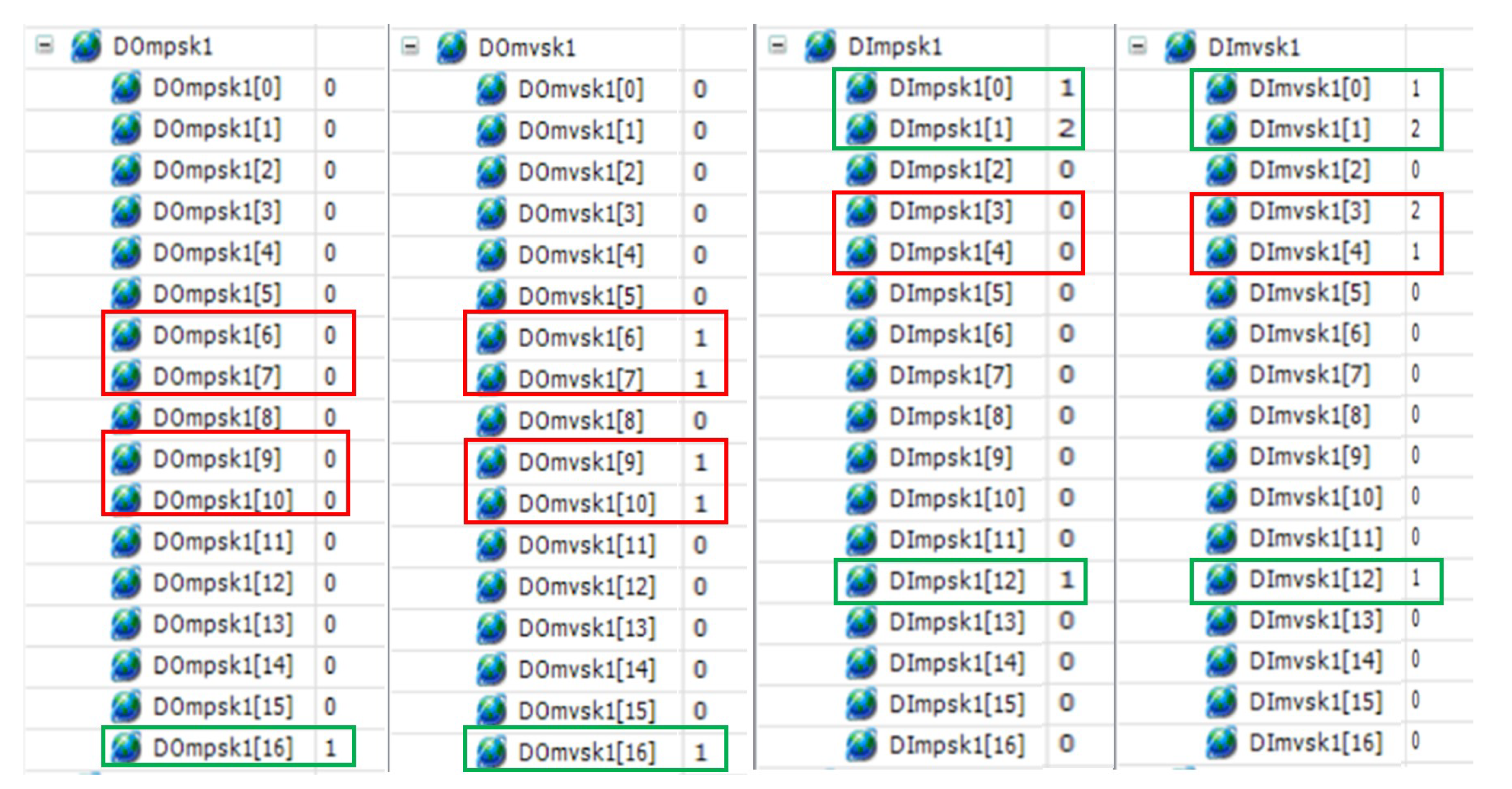
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Virtual System Variables: | |
| Virtual Binary Inputs Array | |
| Virtual Binary Inputs Difference | |
| Virtual Binary Inputs Memory | |
| Virtual Binary Outputs Array | |
| Virtual Binary Outputs Difference | |
| Virtual Binary Outputs Memory | |
| State virtual system | |
| Physical System Variables: | |
| Physical Binary Inputs Array | |
| Physical Binary Inputs Difference | |
| Physical Binary Inputs Memory | |
| Physical Binary Outputs Array | |
| Physical Binary Outputs Difference | |
| Physical Binary Outputs Memory | |
| State physical system |
Appendix A
Appendix Adjacency Matrix Construction

References
- TcaciucGherasim, S.A. A Solution for an Industrial Automation and SCADA System. In Proceedings of the 2022 International Conference and Exposition on Electrical And Power Engineering (EPE), Iaşi, Romania, 20–22 October 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 297–300. [Google Scholar]
- Khadra, A.; Rammal, R. SCADA System for Solar Backup Power System Automation. In Proceedings of the 2022 International Conference on Smart Systems and Power Management (IC2SPM), Beirut, Lebanon, 10–12 November 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 75–79. [Google Scholar]
- Nuhel, A.K.; Sazid, M.M.; Ahmed, K.; Bhuiyan, M.N.M.; Hassan, M.Y.B. A PI Controller-based Water Supplying and Priority Based SCADA System for Industrial Automation using PLC-HMI Scheme. In Proceedings of the 2022 IEEE International Conference on Artificial Intelligence in Engineering and Technology (IICAIET), Kinabalu, Malaysia, 13–15 September 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–6. [Google Scholar]
- Hamzah, M.; Islam, M.M.; Hassan, S.; Akhtar, M.N.; Ferdous, M.J.; Jasser, M.B.; Mohamed, A.W. Distributed Control of Cyber Physical System on Various Domains: A Critical Review. Systems 2023, 11, 208. [Google Scholar] [CrossRef]
- Zhang, K.; Shi, Y.; Karnouskos, S.; Sauter, T.; Fang, H.; Colombo, A.W. Advancements in industrial cyber-physical systems: An overview and perspectives. IEEE Trans. Ind. Inform. 2022, 19, 716–729. [Google Scholar] [CrossRef]
- Villalonga, A.; Beruvides, G.; Castano, F.; Haber, R.E. Cloud-based industrial cyber–physical system for data-driven reasoning: A review and use case on an industry 4.0 pilot line. IEEE Trans. Ind. Inform. 2020, 16, 5975–5984. [Google Scholar] [CrossRef]
- Alshalalfah, A.L.; Mohamed, O.A.; Ouchani, S. A framework for modeling and analyzing cyber-physical systems using statistical model checking. Internet Things 2023, 22, 100732. [Google Scholar] [CrossRef]
- Li, P.; Zhang, F.; Yang, Y.; Ma, X.; Yao, S.; Yang, P.; Zhao, Z.; Lai, C.S.; Lai, L.L. The integrated modeling of microgrid cyber physical system based on hybrid automaton. Front. Energy Res. 2022, 10, 748828. [Google Scholar] [CrossRef]
- Staroletov, S. Automatic proving of stability of the cyber-physical systems in the sense of Lyapunov with KeYmaera. In Proceedings of the 2021 28th Conference of Open Innovations Association (FRUCT), Moscow, Russia, 25–29 January 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 431–438. [Google Scholar]
- Ravasio, D.; Tuissi, L.; Spinelli, S.; Ballarino, A. A Compressed Air Network Energy-Efficient Hierarchical Unit Commitment and Control. In Proceedings of the 2023 15th International Conference on Computer and Automation Engineering (ICCAE), Sydney, Australia, 3–5 March 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 469–473. [Google Scholar]
- Guo, Z.; Zhang, Y.; Zhao, X.; Song, X. CPS-based self-adaptive collaborative control for smart production-logistics systems. IEEE Trans. Cybern. 2020, 51, 188–198. [Google Scholar] [CrossRef] [PubMed]
- Sun, T.; Xia, W.; Zhao, X.; Sun, X.M. A Novel Mathematical Characterization for Switched Linear Systems Based on Automata and Its Stabilizability Analysis. IEEE Trans. Control. Netw. Syst. 2023. [Google Scholar] [CrossRef]
- Alonso, M.; Turanzas, J.; Amaris, H.; Ledo, A.T. Cyber-physical vulnerability assessment in smart grids based on multilayer complex networks. Sensors 2021, 21, 5826. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Z.; Xu, Y.; Li, Y.; Zhao, Y.; Wang, B.; Wen, G. Sparse actuator attack detection and identification: A data-driven approach. IEEE Trans. Cybern. 2023, 53, 4054–4064. [Google Scholar] [CrossRef] [PubMed]
- Pósfai, M.; Barabasi, A.L. Network Science; Citeseer: London, UK, 2016. [Google Scholar]
- Giudici, R. Introducción a la Teoría de Grafos; Equinoccio: Baruta, Miranda, Venezuela, 1997. [Google Scholar]
- Mu, D.; Yue, X.; Ren, H. Robustness of Cyber-Physical Supply Networks in Cascading Failures. Entropy 2021, 23, 769. [Google Scholar] [CrossRef] [PubMed]
- Platzer, A. Logical Foundations of Cyber-Physical Systems; Springer: Cham, Switzerland, 2018; Volume 662. [Google Scholar]
- Lin, H.; Antsaklis, P.J. Hybrid Dynamical Systems; Foundations and Trends® in Systems and Control: Delft, The Netherlands, 2015. [Google Scholar]
- Meyn, S. Control Techniques for Complex Networks; Cambridge University Press: Cambridge, UK, 2008. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State | Output | State | Output | State | Output | State | Output |
|---|---|---|---|---|---|---|---|
| Leds 1 | Elevator motors (QW30) | Leds 1 | Elevator motors | ||||
| Conveyor Motors (Q10.6, Q10.7) | Motor forks (Q11.0 Right) | Elevator motors | Motor forks | ||||
| Motor forks (Q11.1 Left) | Motor forks (Q11.2 Up) | Motor forks | Motor forks | ||||
| Motor forks (Q11.2 Up) | Motor forks (Q11.0 Right) | Motor forks | Motor forks | ||||
| Motor forks (Q11.1 LeftR) | Elevator motors (QW30) | Motor forks | Conveyor motor |
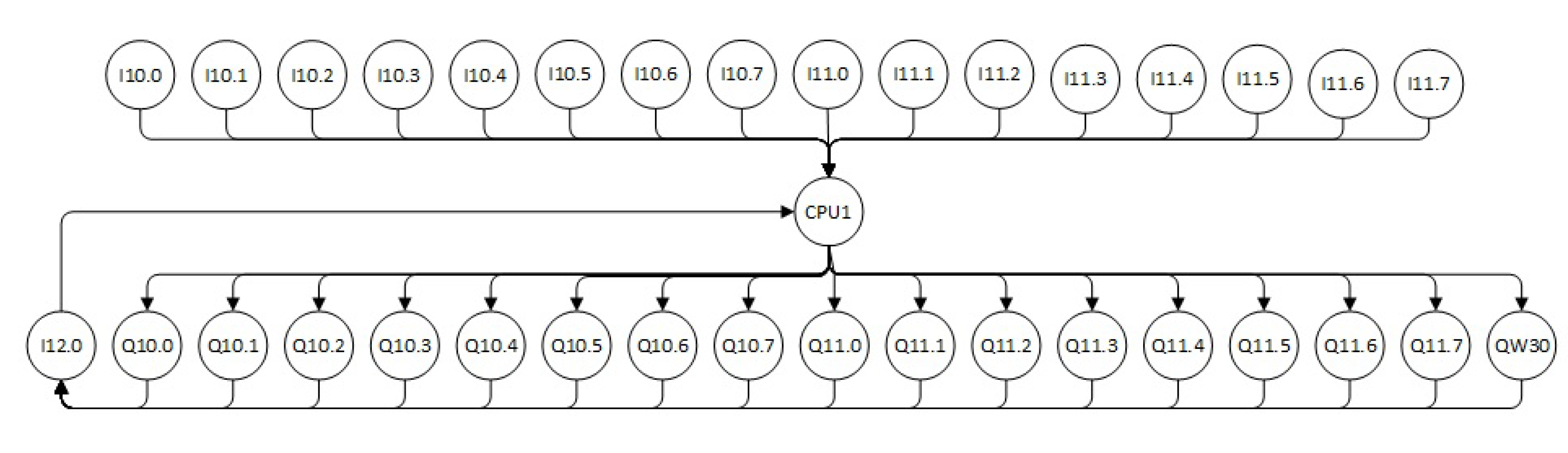
| Input | Denomination | Output | Denomination | Input | Denomination | Output | Denomination |
|---|---|---|---|---|---|---|---|
| I10.0 | Start button L | Q10.0 | Start (Light) | I11.0 | Sensor mov X | Q11.0 | Forks right |
| I10.1 | Stop Button L | Q10.1 | Start L (Light) | I11.1 | Sensor mov Z | Q11.1 | Forks left |
| I10.2 | Reset button L | Q10.2 | Stop L (Light) | I11.2 | Emergency stop | Q11.2 | Forks Up |
| I10.3 | Sensor conveyor 1L | Q10.3 | Stop (Light) | I11.3 | Start button D | Q11.3 | Start D (Light) |
| I10.4 | Sensor conveyor 2L | Q10.4 | Reset L (Light) | I11.4 | Stop button D | Q11.4 | Stop D (Light) |
| I10.5 | Sensor forks right | Q10.5 | Reset (Light) | I11.5 | Reset button D | Q11.5 | Reset D (Light) |
| I10.6 | Sensor forks middle | Q10.6 | Conveyor 1L | I11.6 | Sensor conveyor 1D | Q11.6 | Conveyor 1D |
| I10.7 | Sensor forks left | Q10.7 | Conveyor 2L | I11.7 | Sensor conveyor 2D | Q11.7 | Conveyor 2D |
| I12.0 | Sensor current | QW30 | Target position |
| No. Simulation | State | Input/Output Induce Fault | Input Physical Vector | Input Virtual Vector | Output Physical Vector | Output Virtual Vector | Fault Detection |
|---|---|---|---|---|---|---|---|
| 1 | I10.4, Q11.4 | I10.4 = 0 | I10.4 = 1 | Q11.4 = 0 | Q11.4 = 1 | I10.4, Q11.4—Correct | |
| 2 | I10.5, Q11.0 | I10.5 = 0 | I10.5 = 1 | Q11.0 = 0 | Q11.0 = 1 | I10.5, Q11.0—Correct | |
| 3 | I11.0, I11.1, Q11.4 | I11.0 = 0, I11.1 = 0 | I11.0 = 1, I11.1 = 1 | Q11.4 = 0 | Q11.4 = 1 | I11.0, I11.1, Q11.4—Correct | |
| 4 | I10.5, Q11.6, Q11.7 | I10.5 = 0 | I10.5 = 1 | Q11.6 = 0, Q11.7 = 0 | Q11.6 = 1, Q11.7 = 1 | I10.5, Q11.6, Q11.7—Correct |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Velazquez, A.; Martell, F.; Sanchez, I.Y.; Paredes, C.A. Cyberphysical System Modeled with Complex Networks and Hybrid Automata to Diagnose Multiple and Concurrent Faults in Manufacturing Systems. Appl. Sci. 2023, 13, 10603. https://doi.org/10.3390/app131910603
Velazquez A, Martell F, Sanchez IY, Paredes CA. Cyberphysical System Modeled with Complex Networks and Hybrid Automata to Diagnose Multiple and Concurrent Faults in Manufacturing Systems. Applied Sciences. 2023; 13(19):10603. https://doi.org/10.3390/app131910603
Chicago/Turabian StyleVelazquez, Alejandro, Fernando Martell, Irma Y. Sanchez, and Carlos A. Paredes. 2023. "Cyberphysical System Modeled with Complex Networks and Hybrid Automata to Diagnose Multiple and Concurrent Faults in Manufacturing Systems" Applied Sciences 13, no. 19: 10603. https://doi.org/10.3390/app131910603