
Explicit Method in the Seismic Assessment of Unreinforced Masonry Buildings through Plane Stress Elements

Abstract
:1. Introduction

2. Strengthening Techniques
2.1. Local Strengthening
2.2. Global Strengthening
2.3. Reduction of the Seismic Demand and Energy Dissipation
3. Modelling Strategies
3.1. Modelling Strategies for Material
3.2. Strategies for Numerical Models
3.3. Type of Analyses
3.4. Numerical Solvers: Explicit and Implicit Methods
4. Case Studies
4.1. Piers of Gaioleiro Buildings (Portugal)
4.2. Viceregal Dwellings (Mexico)
5. Masonry Mechanical Properties and Constitutive Law
5.1. Mechanical Properties of the Unreinforced Masonry
5.2. Constitutive Material Law for Unreinforced Masonry
6. Evaluated Parameters
6.1. Parameter 1: Element Types
6.2. Parameter 2: Hourglass Control
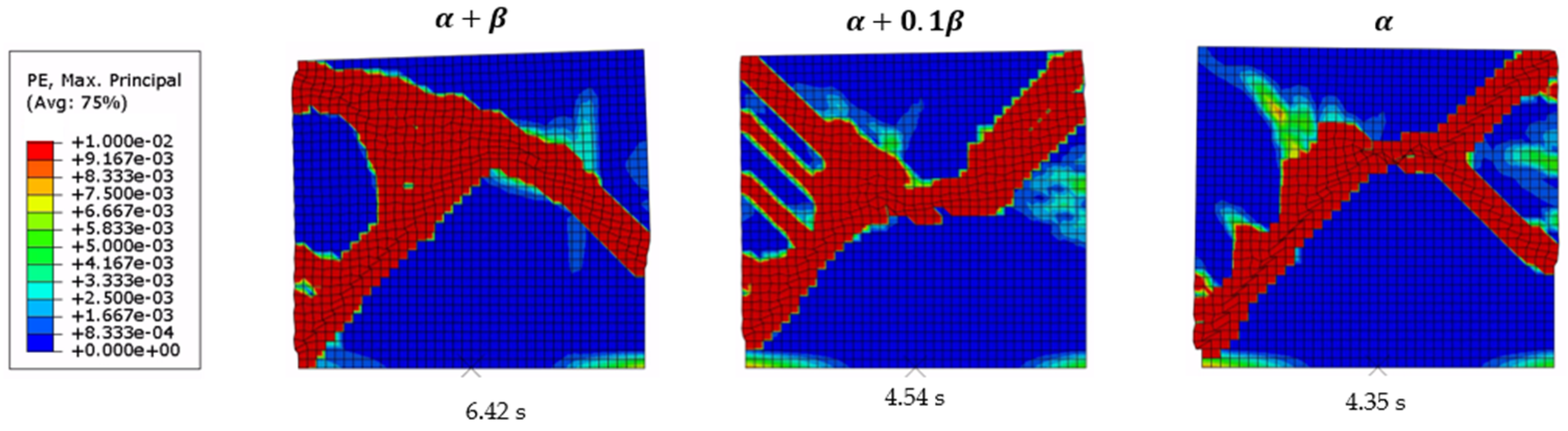
6.3. Parameter 3: Rayleigh Damping in the Explicit Method
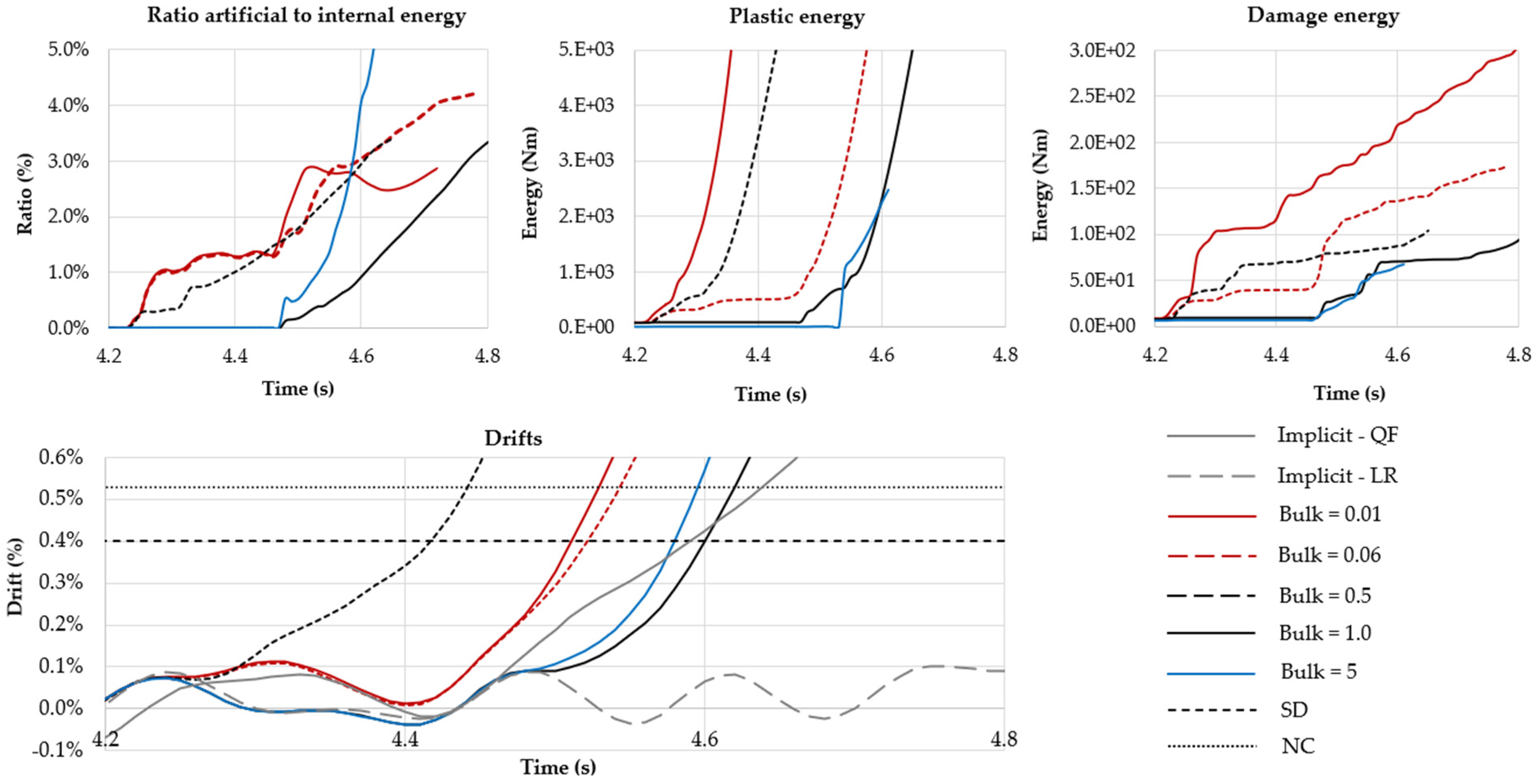
6.4. Parameter 4: Bulk Viscosity in the Explicit Method
7. Seismic Analysis
7.1. Seismic Action
7.2. Results of the Piers Models
7.2.1. Pier 1: Shear-Diagonal Failure
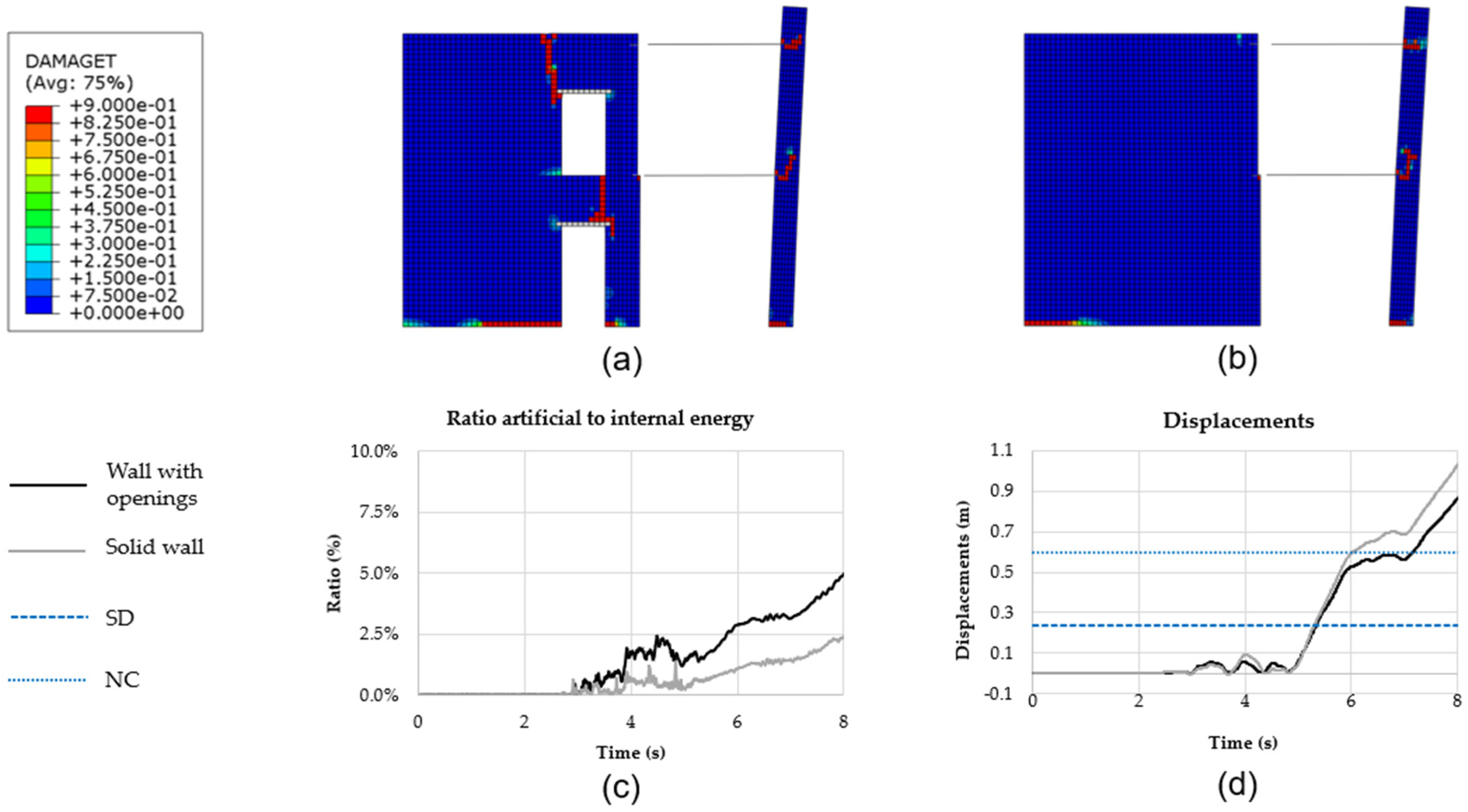
7.2.2. Pier 2: Flexural Failure
7.3. Results of the Viceregal Building Models
7.3.1. Unreinforced Model
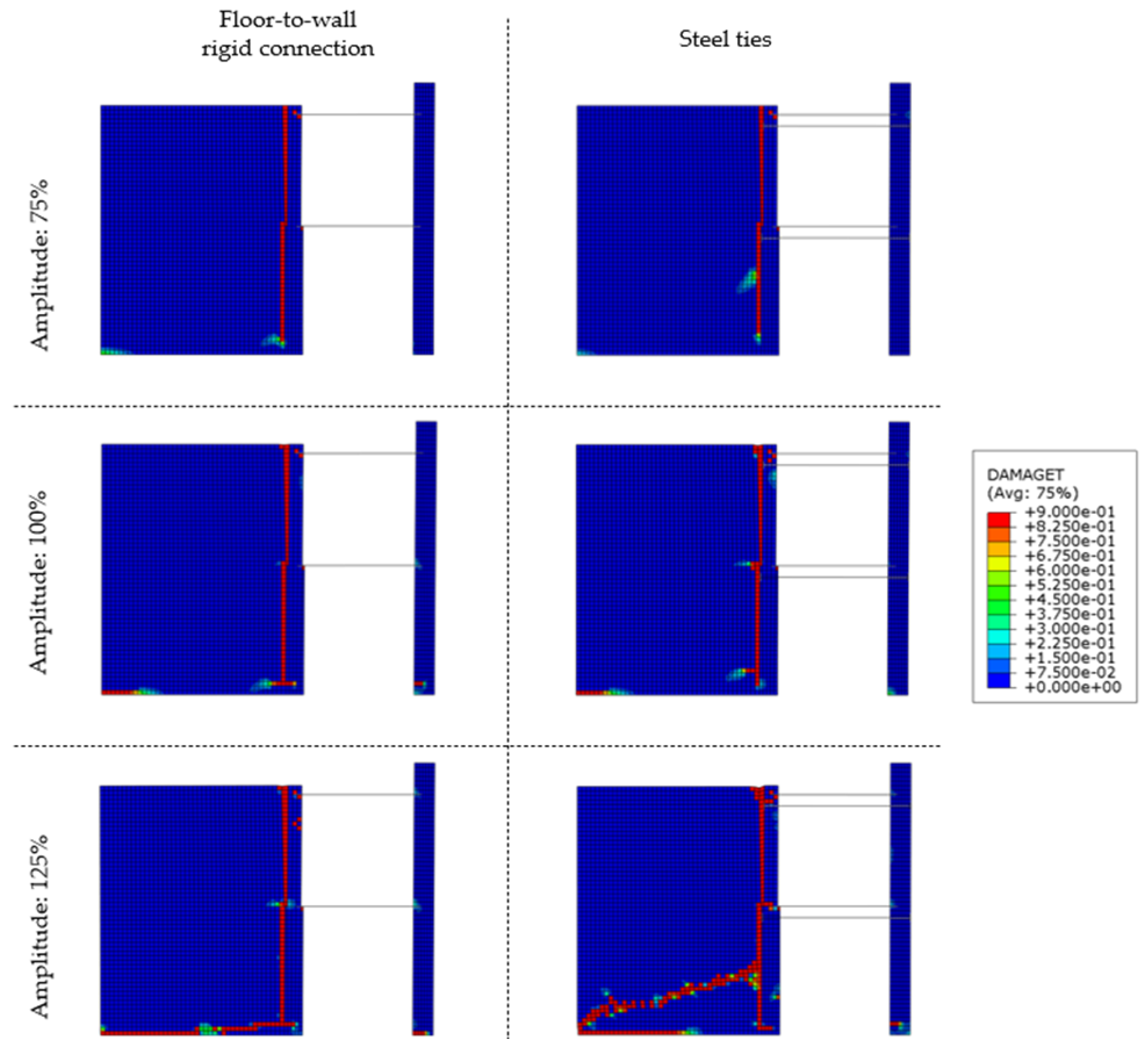
7.3.2. Reinforced Model
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Vlachakis, G.; Vlachaki, E.; Lourenço, P.B. Learning from Failure: Damage and Failure of Masonry Structures, after the 2017 Lesvos Earthquake (Greece). Eng. Fail. Anal. 2020, 117, 104803. [Google Scholar] [CrossRef]
- Liu, Z.; Crewe, A. Effects of Size and Position of Openings on In-Plane Capacity of Unreinforced Masonry Walls. Bull. Earthq. Eng. 2020, 18, 4783–4812. [Google Scholar] [CrossRef]
- Gkournelos, P.D.; Triantafillou, T.C.; Bournas, D.A. Seismic Upgrading of Existing Masonry Structures: A State-of-the-Art Review. Soil Dyn. Earthq. Eng. 2022, 161, 107428. [Google Scholar] [CrossRef]
- De Felice, G.; De Santis, S.; Lourenço, P.B.; Mendes, N. Methods and Challenges for the Seismic Assessment of Historic Masonry Structures. Int. J. Archit. Herit. 2016, 11, 143–160. [Google Scholar] [CrossRef]
- Ferreira, T.M.; Costa, A.A.; Vicente, R.; Varum, H. A Simplified Four-Branch Model for the Analytical Study of the out-of-Plane Performance of Regular Stone URM Walls. Eng. Struct. 2015, 83, 140–153. [Google Scholar] [CrossRef]
- Griffith, M.C.; Magenes, G.; Melis, G.; Picchi, L. Evaluation of Out-of-Plane Stability of Unreinforced Masonry Walls Subjected to Seismic Excitation. J. Earthq. Eng. 2003, 7, 141–169. [Google Scholar] [CrossRef]
- Tomazevic, M. Earthquake-Resistant Design of Masonry Buildings; Series on Innovation in Structures and Construction; Imperial College Press and World Scientific Publishing Co.: London, UK, 1999; Volume 1, ISBN 978-1-86094-066-8. [Google Scholar]
- Mendes, N.; Lourenço, P.B. Chapter 4—Seismic Assessment of Historic Masonry Structures: Out-of-Plane Effects. In Numerical Modeling of Masonry and Historical Structures; Ghiassi, B., Milani, G., Eds.; Woodhead Publishing: Sawston, UK, 2019; pp. 141–162. ISBN 978-0-08-102439-3. [Google Scholar]
- Szabó, S.; Funari, M.F.; Lourenço, P.B. Masonry Patterns’ Influence on the Damage Assessment of URM Walls: Current and Future Trends. Dev. Built Environ. 2023, 13, 100119. [Google Scholar] [CrossRef]
- Ortega, J.; Vasconcelos, G.; Rodrigues, H.; Correia, M.; Lourenço, P.B. Traditional Earthquake Resistant Techniques for Vernacular Architecture and Local Seismic Cultures: A Literature Review. J. Cult. Herit. 2017, 27, 181–196. [Google Scholar] [CrossRef]
- D’Altri, A.M.; Sarhosis, V.; Milani, G.; Rots, J.; Cattari, S.; Lagomarsino, S.; Sacco, E.; Tralli, A.; Castellazzi, G.; De Miranda, S. Modeling Strategies for the Computational Analysis of Unreinforced Masonry Structures: Review and Classification. Arch. Comput. Methods Eng. 2020, 27, 1153–1185. [Google Scholar] [CrossRef]
- Lourenço, P.B. Recent Advances in Masonry Modelling: Micromodelling and Homogenisation. In Multiscale Modeling in Solid Mechanics; Computational and Experimental Methods in Structures; Imperial College Press: London, UK, 2009; Volume 3, pp. 251–294. ISBN 978-1-84816-307-2. [Google Scholar]
- Ghiassi, B.; Vermelfoort, A.T.; Lourenço, P.B. Chapter 7—Masonry Mechanical Properties. In Numerical Modeling of Masonry and Historical Structures; Ghiassi, B., Milani, G., Eds.; Woodhead Publishing: Sawston, UK, 2019; pp. 239–261. ISBN 978-0-08-102439-3. [Google Scholar]
- Pereira, J.M.; Campos, J.; Lourenço, P.B. Masonry Infill Walls under Blast Loading Using Confined Underwater Blast Wave Generators (WBWG). Eng. Struct. 2015, 92, 69–83. [Google Scholar] [CrossRef]
- Pereira, J.M.; Lourenço, P.B. Risk Assessment Due to Terrorist Actions on Public Transportation Networks: A Case Study in Portugal. Int. J. Prot. Struct. 2014, 5, 391–415. [Google Scholar] [CrossRef]
- Tse, D.; Pereira, J.M.; Lourenço, P.B. Numerical Analysis of an Earthen Masonry Structure Subjected to Blast Loading. CivilEng 2021, 2, 969–985. [Google Scholar] [CrossRef]
- Tarque, N.; Camata, G.; Spacone, E.; Varum, H.; Blondet, M. Nonlinear Dynamic Analysis of a Full-Scale Unreinforced Adobe Model. Earthq. Spectra 2014, 30, 1643–1661. [Google Scholar] [CrossRef]
- Yang, B. Comparisons of Implicit and Explicit Time Integration Methods in Finite Element Analysis for Linear Elastic Material and Quasi-Brittle Material in Dynamic Problems. Master’s Thesis, Delft University of Technology, Delf, The Netherlands, 2019. [Google Scholar]
- Noor-E-Khuda, S.; Dhanasekar, M.; Thambiratnam, D.P. An Explicit Finite Element Modelling Method for Masonry Walls under Out-of-Plane Loading. Eng. Struct. 2016, 113, 103–120. [Google Scholar] [CrossRef]
- Lourenço, P.B.; Gaetani, A. Finite Element Analysis for Building Assessment: Advanced Use and Practical Recommendations, 1st ed.; Routledge: New York, NY, USA, 2022; ISBN 978-0-429-34156-4. [Google Scholar]
- Weber, M.; Thoma, K.; Hofmann, J. Finite Element Analysis of Masonry under a Plane Stress State. Eng. Struct. 2021, 226, 111214. [Google Scholar] [CrossRef]
- D’Altri, A.M.; Cannizzaro, F.; Petracca, M.; Talledo, D.A. Nonlinear Modelling of the Seismic Response of Masonry Structures: Calibration Strategies. Bull. Earthq. Eng. 2022, 20, 1999–2043. [Google Scholar] [CrossRef]
- Dassault Systèmes. Abaqus/CAE 2019; Dassault Systèmes Simulia Corp.: Johnston, RI, USA, 2018. [Google Scholar]
- Frumento, S.; Giovinazzi, S.; Lagomarsino, S.; Podestà, S. Seismic Retrofitting of Unreinforced Masonry Buildings in Italy; Springer: Napier, New Zeland, 2006. [Google Scholar]
- Oliveira, D.V.; Silva, R.A.; Garbin, E.; Lourenço, P.B. Strengthening of Three-Leaf Stone Masonry Walls: An Experimental Research. Mater. Struct. 2012, 45, 1259–1276. [Google Scholar] [CrossRef]
- Candeias, P. Avaliação da Vulnerabilidade Sísmica de Edifícios de Alvenaria. Ph.D. Thesis, University of Minho, Lisboa, Portugal, 2010. [Google Scholar]
- Vintzileou, E. Three-Leaf Masonry in Compression, Before and After Grouting: A Review of Literature. Int. J. Archit. Herit. 2011, 5, 513–538. [Google Scholar] [CrossRef]
- Corradi, M.; Borri, A.; Poverello, E.; Castori, G. The Use of Transverse Connectors as Reinforcement of Multi-Leaf Walls. Mater. Struct. 2017, 50, 114. [Google Scholar] [CrossRef]
- Bhattacharya, S.; Nayak, S.; Dutta, S.C. A Critical Review of Retrofitting Methods for Unreinforced Masonry Structures. Int. J. Disaster Risk Reduct. 2014, 7, 51–67. [Google Scholar] [CrossRef]
- Valluzzi, M.R.; Modena, C.; De Felice, G. Current Practice and Open Issues in Strengthening Historical Buildings with Composites. Mater. Struct. 2014, 47, 1971–1985. [Google Scholar] [CrossRef]
- Abbass, A.; Lourenço, P.B.; Oliveira, D.V. The Use of Natural Fibers in Repairing and Strengthening of Cultural Heritage Buildings. Mater. Today Proc. 2020, 31, S321–S328. [Google Scholar] [CrossRef]
- Papanicolaou, C.G.; Triantafillou, T.C.; Karlos, K.; Papathanasiou, M. Textile-Reinforced Mortar (TRM) versus FRP as Strengthening Material of URM Walls: In-Plane Cyclic Loading. Mater. Struct. 2007, 40, 1081–1097. [Google Scholar] [CrossRef]
- Babaeidarabad, S.; Caso, F.D.; Nanni, A. Out-of-Plane Behavior of URM Walls Strengthened with Fabric-Reinforced Cementitious Matrix Composite. J. Compos. Constr. 2014, 18, 04013057. [Google Scholar] [CrossRef]
- Papanicolaou, C.G.; Triantafillou, T.C.; Papathanasiou, M.; Karlos, K. Textile Reinforced Mortar (TRM) versus FRP as Strengthening Material of URM Walls: Out-of-Plane Cyclic Loading. Mater. Struct. 2007, 41, 143–157. [Google Scholar] [CrossRef]
- Federal Emergency Management Agency (FEMA). Techniques for the Seismic Rehabilitation of Existing Buildings; Federal Emergency Management Agency (FEMA): Washington, DC, USA, 2006. [Google Scholar]
- Ferreira, T.M.; Mendes, N.; Silva, R. Multiscale Seismic Vulnerability Assessment and Retrofit of Existing Masonry Buildings. Buildings 2019, 9, 91. [Google Scholar] [CrossRef]
- Borri, A.; Castori, G.; Grazini, A. Retrofitting of Masonry Building with Reinforced Masonry Ring-Beam. Constr. Build. Mater. 2009, 23, 1892–1901. [Google Scholar] [CrossRef]
- Valluzzi, M.R.; Garbin, E.; Benetta, M.D. In-Plane Strengthening of Timber Floors for the Seismic Improvement of Masonry Buildings; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Senaldi, I.; Magenes, G.; Penna, A.; Galasco, A.; Rota, M. The Effect of Stiffened Floor and Roof Diaphragms on the Experimental Seismic Response of a Full-Scale Unreinforced Stone Masonry Building. J. Earthq. Eng. 2014, 18, 407–443. [Google Scholar] [CrossRef]
- Solarino, F.; Oliveira, D.V.; Giresini, L. Wall-to-Horizontal Diaphragm Connections in Historical Buildings: A State-of-the-Art Review. Eng. Struct. 2019, 199, 109559. [Google Scholar] [CrossRef]
- Angulo-Ibáñez, Q.; Mas-Tomás, Á.; Galvañ-LLopis, V.; Sántolaria-Montesinos, J.L. Traditional Braces of Earth Constructions. Constr. Build. Mater. 2012, 30, 389–399. [Google Scholar] [CrossRef]
- Lucibello, G.; Brandonisio, G.; Mele, E.; De Luca, A. Seismic Damage and Performance of Palazzo Centi after L’Aquila Earthquake: A Paradigmatic Case Study of Effectiveness of Mechanical Steel Ties. Eng. Fail. Anal. 2013, 34, 407–430. [Google Scholar] [CrossRef]
- Nochebuena-Mora, E.; Mendes, N.; Lourenço, P.B.; Covas, J.A. Vibration Control Systems: A Review of Their Application to Historical Unreinforced Masonry Buildings. J. Build. Eng. 2021, 44, 103333. [Google Scholar] [CrossRef]
- Saaed, T.E.; Nikolakopoulos, G.; Jonasson, J.-E.; Hedlund, H. A State-of-the-Art Review of Structural Control Systems. J. Vib. Control 2015, 21, 919–937. [Google Scholar] [CrossRef]
- Warn, G.P.; Ryan, K.L. A Review of Seismic Isolation for Buildings: Historical Development and Research Needs. Buildings 2012, 2, 300–325. [Google Scholar] [CrossRef]
- Symans, M.D.; Charney, F.A.; Whittaker, A.S.; Constantinou, M.C.; Kircher, C.A.; Johnson, M.W.; McNamara, R.J. Energy Dissipation Systems for Seismic Applications: Current Practice and Recent Developments. J. Struct. Eng. 2008, 134, 3–21. [Google Scholar] [CrossRef]
- Martínez-Rueda, J.E. On the Evolution of Energy Dissipation Devices for Seismic Design. Earthq. Spectra 2002, 18, 309–346. [Google Scholar] [CrossRef]
- Lockrem, R.; Schuller, M.; Locke, R. Modifying Building Response Using Energy Absorbing Diaphragm-to-Wall Connectors. In Proceedings of the 4th International Seminar on Structural Analysis of Historic Constructions 2004; Modena, C., Lourenço, P.B., Roca, P., Eds.; Taylor & Francis Group: Padova, Italy, 2005; pp. 1215–1220. [Google Scholar]
- Preti, M.; Loda, S.; Bolis, V.; Cominelli, S.; Marini, A.; Giuriani, E. Dissipative Roof Diaphragm for the Seismic Retrofit of Listed Masonry Churches. J. Earthq. Eng. 2019, 23, 1241–1261. [Google Scholar] [CrossRef]
- D’Ayala, D.F.; Paganoni, S. Testing and Design Protocol of Dissipative Devices for Out-of-Plane Damage. Proc. Inst. Civ. Eng.—Struct. Build. 2014, 167, 26–40. [Google Scholar] [CrossRef]
- Alam, M.S.; Youssef, M.A.; Nehdi, M. Utilizing Shape Memory Alloys to Enhance the Performance and Safety of Civil Infrastructure: A Review. Can. J. Civ. Eng. 2007, 34, 1075–1086. [Google Scholar] [CrossRef]
- Indirli, M.; Castellano, M.G. Shape Memory Alloy Devices for the Structural Improvement of Masonry Heritage Structures. Int. J. Archit. Herit. 2008, 2, 93–119. [Google Scholar] [CrossRef]
- Giresini, L.; Solarino, F.; Taddei, F.; Mueller, G. Experimental Estimation of Energy Dissipation in Rocking Masonry Walls Restrained by an Innovative Seismic Dissipator (LICORD). Bull. Earthq. Eng. 2021, 19, 2265–2289. [Google Scholar] [CrossRef]
- Addessi, D.; Marfia, S.; Sacco, E. Chapter 10—Homogenization and Multiscale Analysis. In Numerical Modeling of Masonry and Historical Structures; Ghiassi, B., Milani, G., Eds.; Woodhead Publishing: Sawston, UK, 2019; pp. 351–395. ISBN 978-0-08-102439-3. [Google Scholar]
- Caddemi, S.; Caliò, I.; Cannizzaro, F.; Pantò, B.; Rapicavoli, D. Chapter 14—Descrete Macroelement Modeling. In Numerical Modeling of Masonry and Historical Structures; Ghiassi, B., Milani, G., Eds.; Woodhead Publishing: Sawston, UK, 2019; pp. 503–533. ISBN 978-0-08-102439-3. [Google Scholar]
- Massart, T.J.; Ehab Moustafa Kamel, K.; Hernandez, H. Chapter 11—Automated Geometry Extraction and Discretization for Cohesive Zone-Based Modeling of Irregular Masonry. In Numerical Modeling of Masonry and Historical Structures; Ghiassi, B., Milani, G., Eds.; Woodhead Publishing: Sawston, UK, 2019; pp. 397–422. ISBN 978-0-08-102439-3. [Google Scholar]
- Milani, G.; Taliercio, A. Chapter 12—Homogenization Limit Analysis. In Numerical Modeling of Masonry and Historical Structures; Ghiassi, B., Milani, G., Eds.; Woodhead Publishing: Sawston, UK, 2019; pp. 423–467. ISBN 978-0-08-102439-3. [Google Scholar]
- Minga, E.; Macorini, L.; Izzuddin, B.A.; Calio’, I. Chapter 8—Macromodeling. In Numerical Modeling of Masonry and Historical Structures; Ghiassi, B., Milani, G., Eds.; Woodhead Publishing: Sawston, UK, 2019; pp. 263–294. ISBN 978-0-08-102439-3. [Google Scholar]
- Sarhosis, V.; Lemos, J.V.; Bagi, K. Chapter 13—Discrete Element Modeling. In Numerical Modeling of Masonry and Historical Structures; Ghiassi, B., Milani, G., Eds.; Woodhead Publishing: Sawston, UK, 2019; pp. 469–501. ISBN 978-0-08-102439-3. [Google Scholar]
- Rekik, A.; Lebon, F. Chapter 9—Micromodeling. In Numerical Modeling of Masonry and Historical Structures; Ghiassi, B., Milani, G., Eds.; Woodhead Publishing: Sawston, UK, 2019; pp. 295–349. ISBN 978-0-08-102439-3. [Google Scholar]
- Smoljanović, H.; Živaljić, N.; Nikolić, Ž. A Combined Finite-Discrete Element Analysis of Dry Stone Masonry Structures. Eng. Struct. 2013, 52, 89–100. [Google Scholar] [CrossRef]
- Lemos, J.V. Discrete Element Modeling of Masonry Structures. Int. J. Archit. Herit. 2007, 1, 190–213. [Google Scholar] [CrossRef]
- Belmouden, Y.; Lestuzzi, P. An Equivalent Frame Model for Seismic Analysis of Masonry and Reinforced Concrete Buildings. Constr. Build. Mater. 2009, 23, 40–53. [Google Scholar] [CrossRef]
- Petrovčič, S.; Kilar, V. Seismic Failure Mode Interaction for the Equivalent Frame Modeling of Unreinforced Masonry Structures. Eng. Struct. 2013, 54, 9–22. [Google Scholar] [CrossRef]
- Chopra, A.K. Dynamics of Structures: Theory and Applications to Earthquake Engineering, 4th ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2015; ISBN 978-0-273-77424-2. [Google Scholar]
- Clough, R.W.; Penzien, J. Dynamic of Structures, 3rd ed.; Computers & Structures: Berkeley, CA, USA, 2003. [Google Scholar]
- Dokainish, M.A.; Subbaraj, K. A Survey of Direct Time-Integration Methods in Computational Structural Dynamics—I. Explicit Methods. Comput. Struct. 1989, 32, 1371–1386. [Google Scholar] [CrossRef]
- Hilber, H.M.; Hughes, T.J.R.; Taylor, R.L. Improved Numerical Dissipation for Time Integration Algorithms in Structural Dynamics. Earthq. Eng. Struct. Dyn. 1977, 5, 283–292. [Google Scholar] [CrossRef]
- Subbaraj, K.; Dokainish, M.A. A Survey of Direct Time-Integration Methods in Computational Structural Dynamics—II. Implicit Methods. Comput. Struct. 1989, 32, 1387–1401. [Google Scholar] [CrossRef]
- Wu, S.R.; Gu, L. Introduction to the Explicit Finite Element Method for Nonlinear Transient Dynamics; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2012; ISBN 978-1-118-38201-1. [Google Scholar]
- Appleton, J.G. Reabilitação de Edifícios “Gaioleiros”, 1st ed.; Orion: Lisboa, Portugal, 2005; ISBN 972-8620-05-5. [Google Scholar]
- Simões, A.G.; Appleton, J.G.; Bento, R.; Caldas, J.V.; Lourenço, P.B.; Lagomarsino, S. Architectural and Structural Characteristics of Masonry Buildings between the 19th and 20th Centuries in Lisbon, Portugal. Int. J. Archit. Herit. 2017, 11, 457–474. [Google Scholar] [CrossRef]
- Bühler, D. Puebla, Patrimonio de Arquitectura Civil del Virreinato, 1st ed.; Deutsches Museum ICOMOS: München, Germany, 2001; ISBN 3-924183-81-3. [Google Scholar]
- Barrera Barrera, M. Los Inmuebles Habitacionales en Valladolid de Michoacán, Siglo XVIII, Sistemas Constructivos y Proporcionamiento del Espacio.pdf. Master’s Thesis, Universidad Michoacana de San Nicolás de Hidalgo, Morelia, Mexico, 2012. [Google Scholar]
- González Avellaneda, A.; Hueytletl Torres, A.; Pérez Méndez, B.; Ramos Molina, L.; Salazar Muñoz, V. Manual Técnico de Procedimientos para la Rehabilitación de Monumentos Históricos en el Distrito Federal, 1st ed.; Instituto Nacional de Antropología e Historia: Ciudad de México, Mexico, 1988. [Google Scholar]
- Ministry of Infrastructure and Transport Circolare 2019 Instruction for the Application of the Building Code for Constructions; Aggiornamento delle “Norme tecniche per le costruzioni”: Roma, Italy, 2019.
- Dassault Systèmes. Abaqus Theory Guide, Version 6.14.; Dassault Systèmes Simulia Corp.: Providence, RI, USA, 2014. Available online: http://130.149.89.49:2080/v6.14/books/stm/default.htm(accessed on 14 August 2023).
- Acito, M.; Bocciarelli, M.; Chesi, C.; Milani, G. Collapse of the Clock Tower in Finale Emilia after the May 2012 Emilia Romagna Earthquake Sequence: Numerical Insight. Eng. Struct. 2014, 72, 70–91. [Google Scholar] [CrossRef]
- Tiberti, S.; Acito, M.; Milani, G. Comprehensive FE Numerical Insight into Finale Emilia Castle Behavior under 2012 Emilia Romagna Seismic Sequence: Damage Causes and Seismic Vulnerability Mitigation Hypothesis. Eng. Struct. 2016, 117, 397–421. [Google Scholar] [CrossRef]
- Castellazzi, G.; D’Altri, A.M.; De Miranda, S.; Chiozzi, A.; Tralli, A. Numerical Insights on the Seismic Behavior of a Non-Isolated Historical Masonry Tower. Bull. Earthq. Eng. 2018, 16, 933–961. [Google Scholar] [CrossRef]
- Valente, M. Seismic Behavior and Damage Assessment of Two Historical Fortified Masonry Palaces with Corner Towers. Eng. Fail. Anal. 2022, 134, 106003. [Google Scholar] [CrossRef]
- Valente, M. Earthquake Response and Damage Patterns Assessment of Two Historical Masonry Churches with Bell Tower. Eng. Fail. Anal. 2023, 151, 107418. [Google Scholar] [CrossRef]
- Lubliner, J.; Oliver, J.; Oller, S.; Oñate, E. A Plastic-Damage Model for Concrete. Int. J. Solids Struct. 1989, 25, 299–326. [Google Scholar] [CrossRef]
- Lee, J.; Fenves, G.L. Plastic-Damage Model for Cyclic Loading of Concrete Structures. J. Eng. Mech. 1998, 124, 892–900. [Google Scholar] [CrossRef]
- Chi, Y.; Yu, M.; Huang, L.; Xu, L. Finite Element Modeling of Steel-Polypropylene Hybrid Fiber Reinforced Concrete Using Modified Concrete Damaged Plasticity. Eng. Struct. 2017, 148, 23–35. [Google Scholar] [CrossRef]
- Feenstra, P.H. Computational Aspects of Biaxial Stress in Plain and Reinforced Concrete. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 1993. [Google Scholar]
- Dassault Systèmes. Abaqus Analysis User’s Guide, Version 6.14.; Dassault Systèmes Simulia Corp.: Providence, RI, USA, 2014. Available online: http://130.149.89.49:2080/v6.14/books/usb/default.htm(accessed on 14 August 2023).
- AlGohi, B.H.; Baluch, M.H.; Rahman, M.K.; Al-Gadhib, A.H.; Demir, C. Plastic-Damage Modeling of Unreinforced Masonry Walls (URM) Subject to Lateral Loading. Arab. J. Sci. Eng. 2017, 42, 4201–4220. [Google Scholar] [CrossRef]
- Dassault Systèmes. Getting Started with Abaqus: Interactive Edition, Version 6.14.; Dassault Systèmes Simulia Corp.: Providence, RI, USA, 2014. Available online: http://130.149.89.49:2080/v6.14/books/gsa/default.htm(accessed on 14 August 2023).
- Martin, O. Comparison of Different Constitutive Models for Concrete in ABAQUS/Explicit for Missile Impact Analyses; European Commission Joint Research Centre Institute for EnergyPublications Office: Luxembourg, 2010; ISBN 978-92-79-14988-7. [Google Scholar]
- Boulbes, R.J. Troubleshooting Finite-Element Modeling with Abaqus: With Application in Structural Engineering Analysis; Springer Cham: Cham, Switzerland, 2020; ISBN 978-3-030-26739-1. [Google Scholar]
- Storheim, M.; Notaro, G.; Johansen, A.; Amdahl, J. Comparison of ABAQUS and LS-DYNA in Simulations of Ship Collisions. In Proceedings of the ICCGS 2016, Ulsan, Republic of Korea, 15–18 June 2016. [Google Scholar]
- Zheng, G.; Nie, H.; Chen, J.; Chen, C.; Lee, H.P. Dynamic Analysis of Lunar Lander during Soft Landing Using Explicit Finite Element Method. Acta Astronaut. 2018, 148, 69–81. [Google Scholar] [CrossRef]
- Lemos, J.V.; Dawson, E.M.; Cheng, Z. Application of Maxwell Damping in the Dynamic Analysis of Masonry Structures with Discrete Elements. Int. J. Mason. Res. Innov. 2022, 7, 663–686. [Google Scholar] [CrossRef]
- Chen, X.M.; Duan, J.; Qi, H.; Li, Y.G. Rayleigh Damping in Abaqus/Explicit Dynamic Analysis. Appl. Mech. Mater. 2014, 627, 288–294. [Google Scholar] [CrossRef]
- Bianchini, N.; Mendes, N.; Calderini, C.; Lourenço, P.B. Modelling of the Dynamic Response of a Reduced Scale Dry Joints Groin Vault. J. Build. Eng. 2023, 66, 105826. [Google Scholar] [CrossRef]
- CEN EN 1998-3 (2005); Eurocode 8: Design of Structures for Earthquake Resistance—Part 3: Assessment and Retrofitting of Buildings. European Committee for Standardization: Maastricht, The Netherlands, 2005.
- Doherty, K.; Griffith, M.C.; Lam, N.; Wilson, J. Displacement-Based Seismic Analysis for out-of-Plane Bending of Unreinforced Masonry Walls. Earthq. Eng. Struct. Dyn. 2002, 31, 833–850. [Google Scholar] [CrossRef]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| E [MPa] | Poisson’s Ratio | [MPa] | [MPa] | [N/mm] | [N/mm] | Specific Weight [kN/m3] |
|---|---|---|---|---|---|---|
| 1050 | 0.2 | 1.5 | 0.15 | 4.17 | 0.05 | 19 |
| 10° | 0.1 | 1.16 | 2/3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nochebuena-Mora, E.; Mendes, N.; Calixto, V.; Oliveira, S. Explicit Method in the Seismic Assessment of Unreinforced Masonry Buildings through Plane Stress Elements. Appl. Sci. 2023, 13, 10602. https://doi.org/10.3390/app131910602
Nochebuena-Mora E, Mendes N, Calixto V, Oliveira S. Explicit Method in the Seismic Assessment of Unreinforced Masonry Buildings through Plane Stress Elements. Applied Sciences. 2023; 13(19):10602. https://doi.org/10.3390/app131910602
Chicago/Turabian StyleNochebuena-Mora, Elesban, Nuno Mendes, Valentina Calixto, and Sandra Oliveira. 2023. "Explicit Method in the Seismic Assessment of Unreinforced Masonry Buildings through Plane Stress Elements" Applied Sciences 13, no. 19: 10602. https://doi.org/10.3390/app131910602