1. Introduction
Power converters play a crucial role in supplying direct or alternating current to actuators. Therefore, ensuring the reliability of power supplies is of utmost importance. Interleaved boost converters (IBCs) can be used as an alternative to increase reduced voltage levels, and they have proven to be more reliable than conventional boost converters [
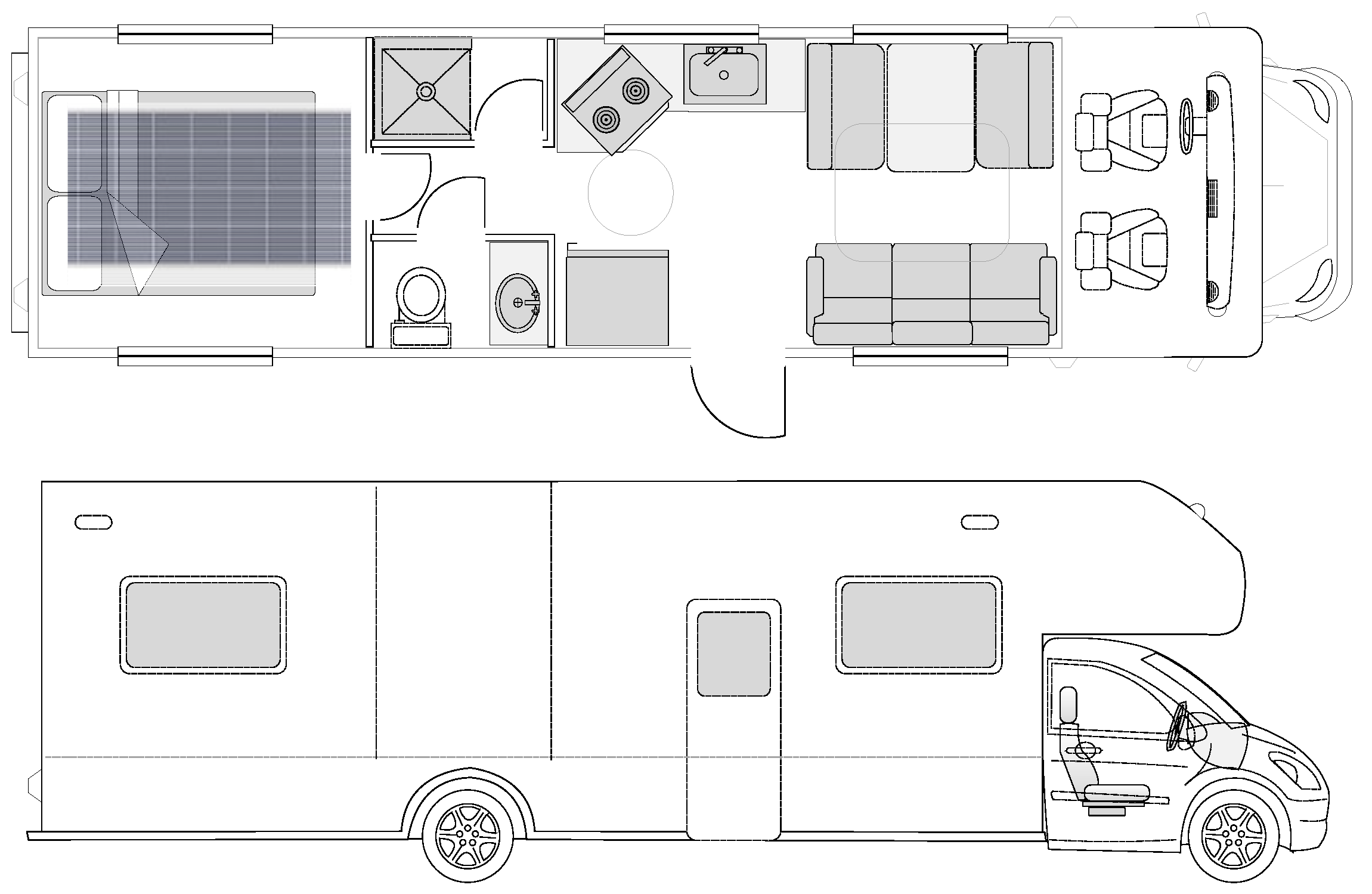
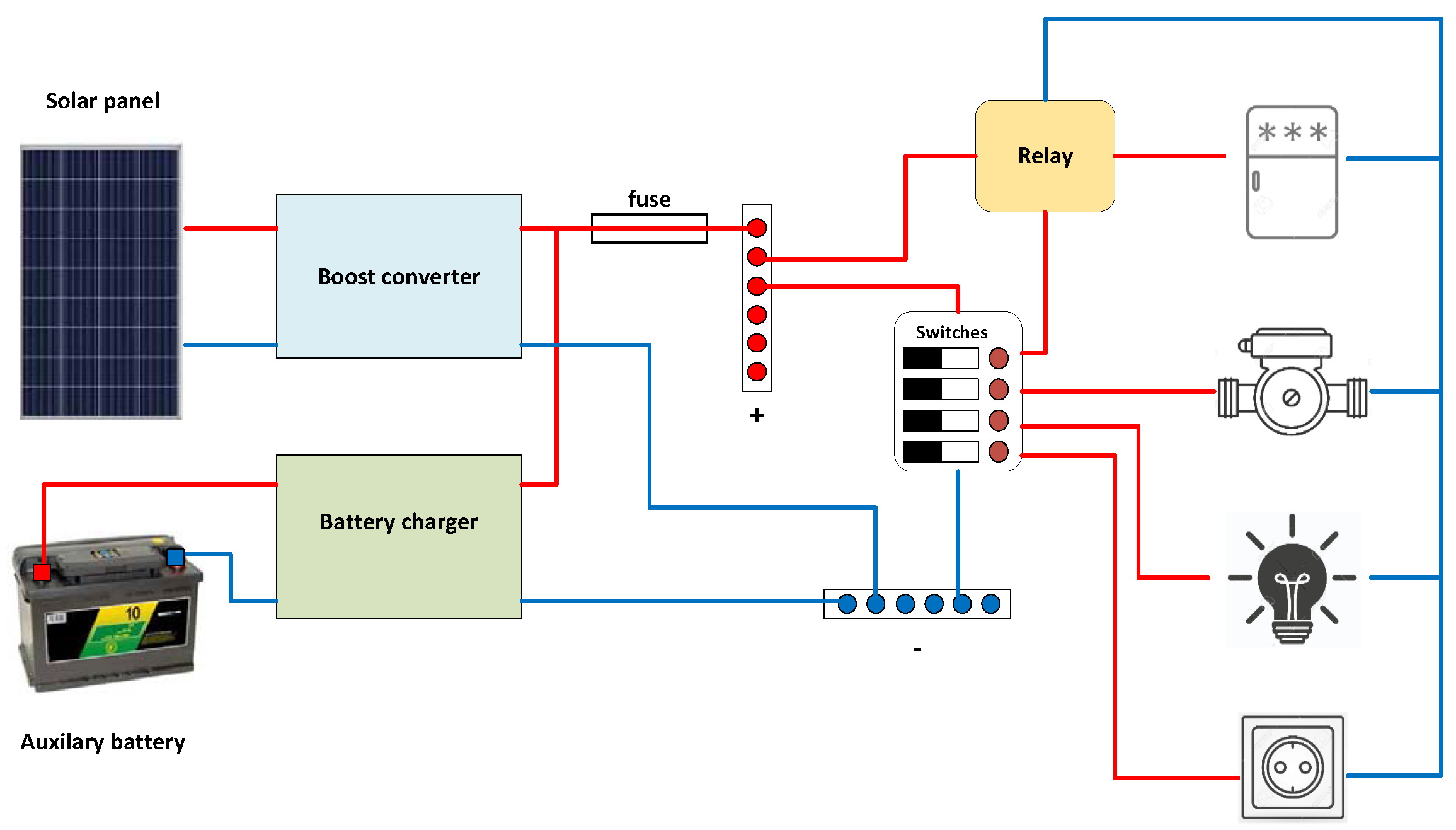
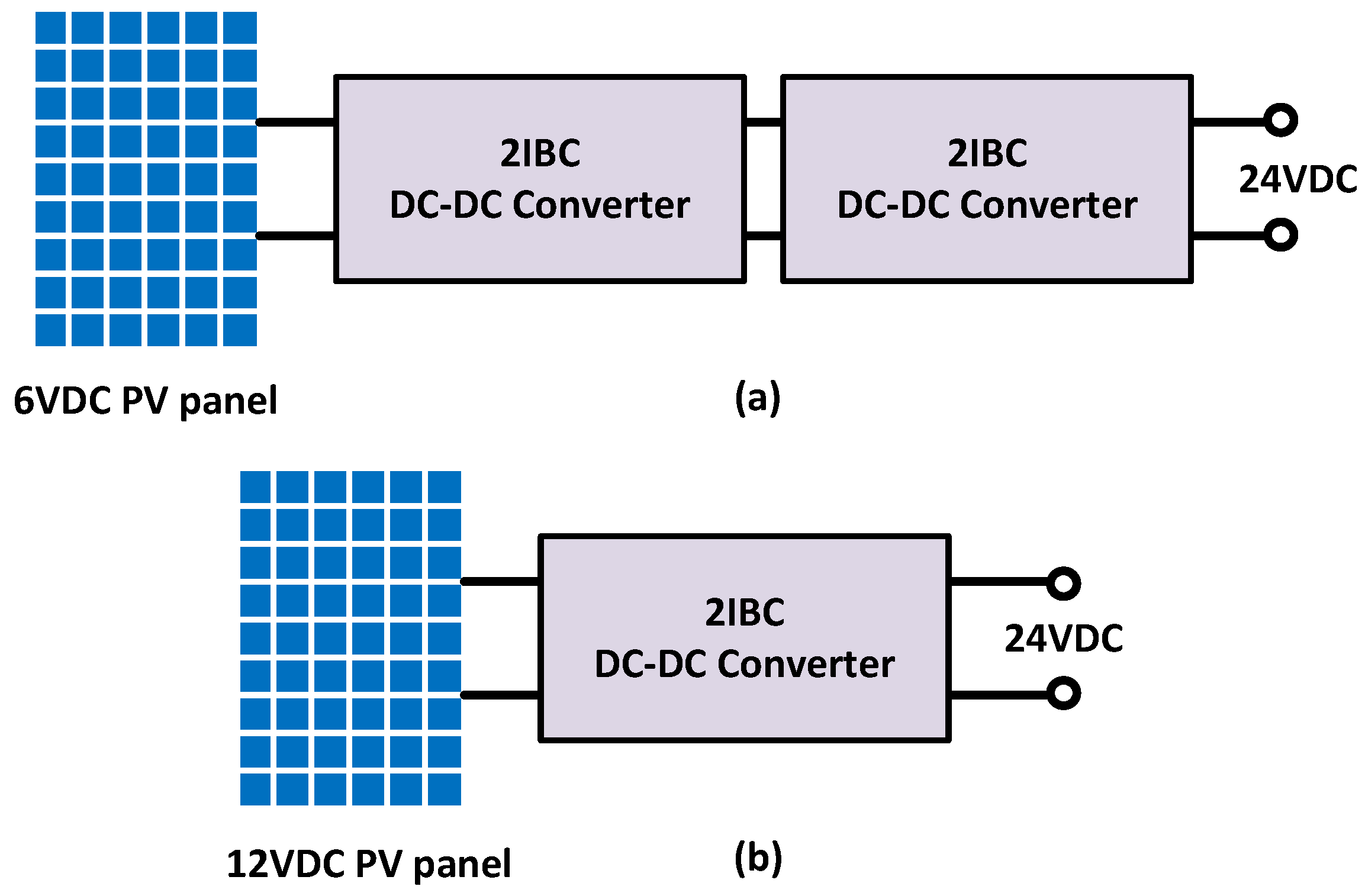
1]. In stand-alone applications that rely on renewable energy sources, there is high demand for 12 VDC and 24 VDC. Modular power supplies, which utilize free and clean solar energy, can act as secondary power sources to relieve powertrain systems in cars, especially for vehicles such as camping-cars, which require a reliable and non-polluting energy source. Camping-car owners who seek complete freedom in their travels, without the need for charging stations, often require autonomy in electricity. The photovoltaic (PV) panels of 6 VDC and 12 VDC are commonly used, and finding reliable and modular voltage doublers is essential. The reliability of such doublers is described as follows: if one stage fails, another can take over, ensuring the continuity of service. The reader can refer to [
2] to understand the differences between various DC-DC converters like buck, buck-boost, SEPIC, and flyback, as well as their applications in photovoltaic systems, array configurations, advanced maximum power point tracking (MPPT) methods, and comparisons in terms of hardware complexity, cost, and efficiency. The use of interleaved DC converters is gaining interest from both industrialists and researchers in the power electronics and converters field. These converters provide a relatively low-input current ripple, making them more attractive.
The control of power converters is a well-researched area with the aim of optimizing the system and maintaining its efficiency despite parameter variations and external disturbances. Due to the strong nonlinearity of the PV panel and power converter, nonlinear controllers are often used to address this challenge. Several control techniques have been proposed and tested, such as the incremental Conductance Maximum Power Point Tracking (InC MPPT) algorithm [
3], proportional–integral–derivative control (PID), flatness theory [
4], and passivity-based control [
5]. While these methods have been effective, practical implementation remains a significant task. One promising approach is that of sliding mode control (SMC), a robust and widely used controller in various fields including power converters in photovoltaic energy (see, e.g., [
6,
7,
8] and the references therein). Several papers have reported on the effectiveness of SMC, with applications ranging from flyback-based PV systems [
9] to bidirectional DC converters [
10]. To increase the efficiency, SMC is often consolidated with other methods such as PI control [
11]. A novel direct sliding mode controller (DSMC) has also been proposed to minimize the use of unreliable DC-link capacitors in large electrolytic capacitors used in grid-connected and stand-alone photovoltaic applications [
10].
A fast fault diagnosis and fault-tolerant method for DC–DC converters is mandatory, even though it is possible to enhance the structure of the IBC to reduce stress on power components as seen in [
12]. The fault diagnostic algorithm comprises two parts: fault detection and fault identification. Model-based methods are prevalent and attractive for power converters, using the analytic knowledge of the system since there is generally a certain level of knowledge about parameters allowing for the construction of state observers, parity equations, or residual generation. Fault-tolerant control (FTC) establishes the process’s reconfiguration to avoid shutdown. It can be active or passive. Active techniques reconfigure the control parameters in the presence of a fault but passive ones consider that possible system failures are known. The controller is thus developed to cover a set of specified faults [
13]. When the system has adequate sensors, it is possible to analyze the inductance voltage and deduce the non-symmetry of the stage and apply a fault-tolerant control to recover the faulty component [
14,
15]. However, most diagnosis methods use the inductance current itself. Based on the switching frequency, it is possible to analyze the harmonic components, and a system reconfiguration is applied to reduce input current ripples by only allowing the healthy stages [
16]. Observers are also a considerable approach in the case of weak sensor presence, regardless of whether this is intended or not [
17,
18,
19,
20]. Based on the simplicity and robustness of immersion and invariant (I&I) theory, I&I observers are proposed in [
17] and adopted for residual generation to detect switch open failure. In this case, there was a need to adapt the threshold to eliminate false alarms. Salman et al. [
18] proposed a generalized PI observer to detect open switch faults. Extensive research has been performed on the open circuit fault [
17,
18,
21,
22,
23,
24]. A limited number of papers are dealing with sensor faults [
18], short-circuit faults [
21,
23,
25], and capacitor faults, which are an important source of faults in a power converter (capacitor 30%, printed circuit board 26%, and semiconductor 21%) [
26].
Faults affecting power capacitors are varied, and most of them are caused by switching semiconductors. Moreover, the kind of material has a great effect on the reliability of capacitors and semiconductors [
27]. The detection of power capacitor faults can be associated with artificial intelligence (AI). The authors in [
28] used deep learning associated with fuzzy logic and [
29] used a convolutional neural network combined with the chaotic synchronization. The proposed methods have good results but the complexity of implementing these methods in embedded systems remains a real challenge.
Rule-based fault monitoring and location methods are imperfect and inflexible as they use simple predictive rules to identify the possible causes of system failures. Machine learning methods have been successfully applied to PV systems [
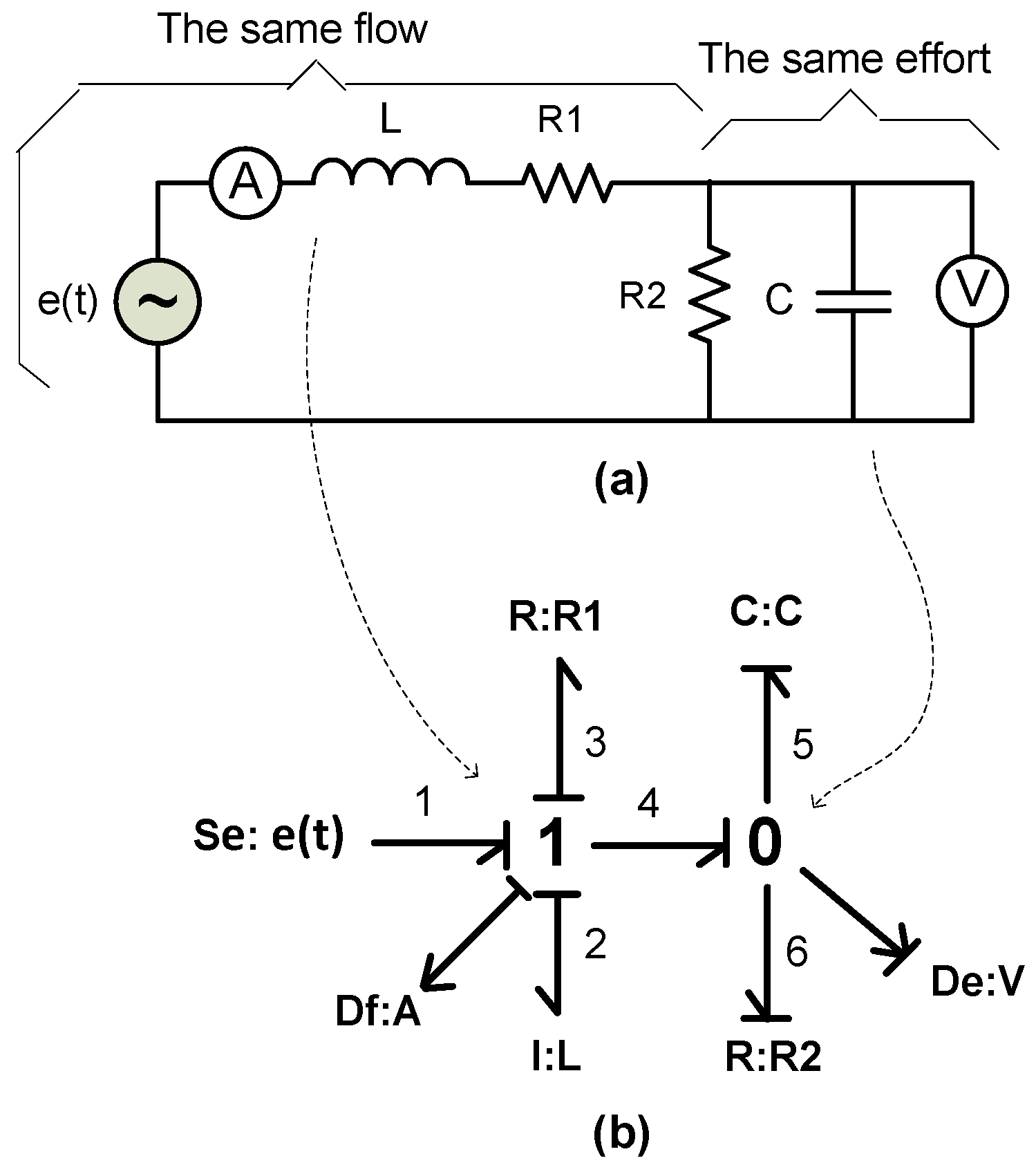
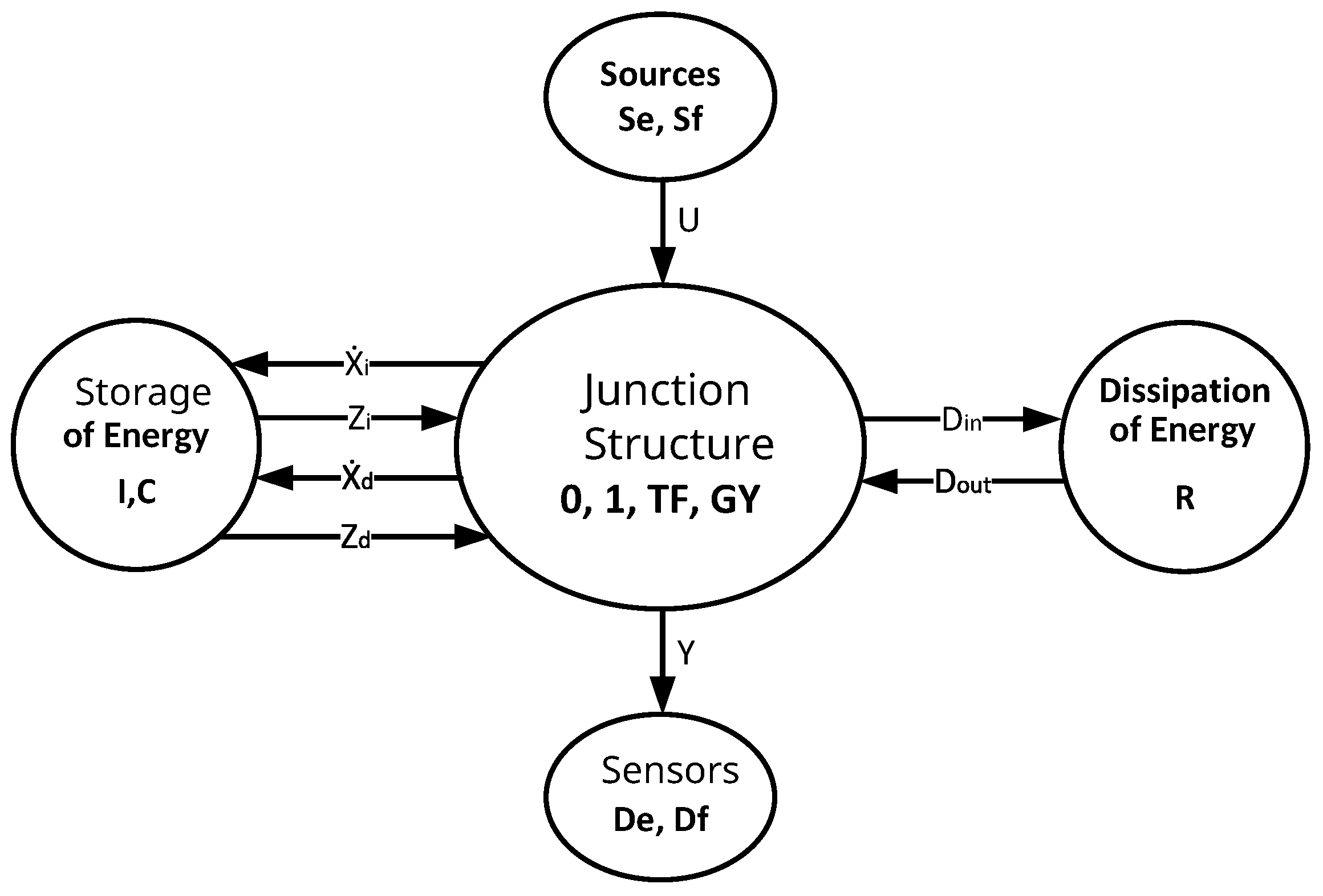
30], but these require a historical database to be effective. Model-based fault monitoring and diagnosis methods are based on the physical system’s behavior and structure, and use a model to represent a large amount of information about its structure, function, and behavior. The bond graph (BG) formalism provides several advantages, including the ability to deduce cause–effect relationships and study causality at the system level. This method is attractive as it can detect various types of failures, although it requires an increased number of sensors. It can integrate artificial intelligence, such as Bayesian networks and reliability failure rates, and has been used for modeling, analysis, control, and monitoring in the power converter field [
31].
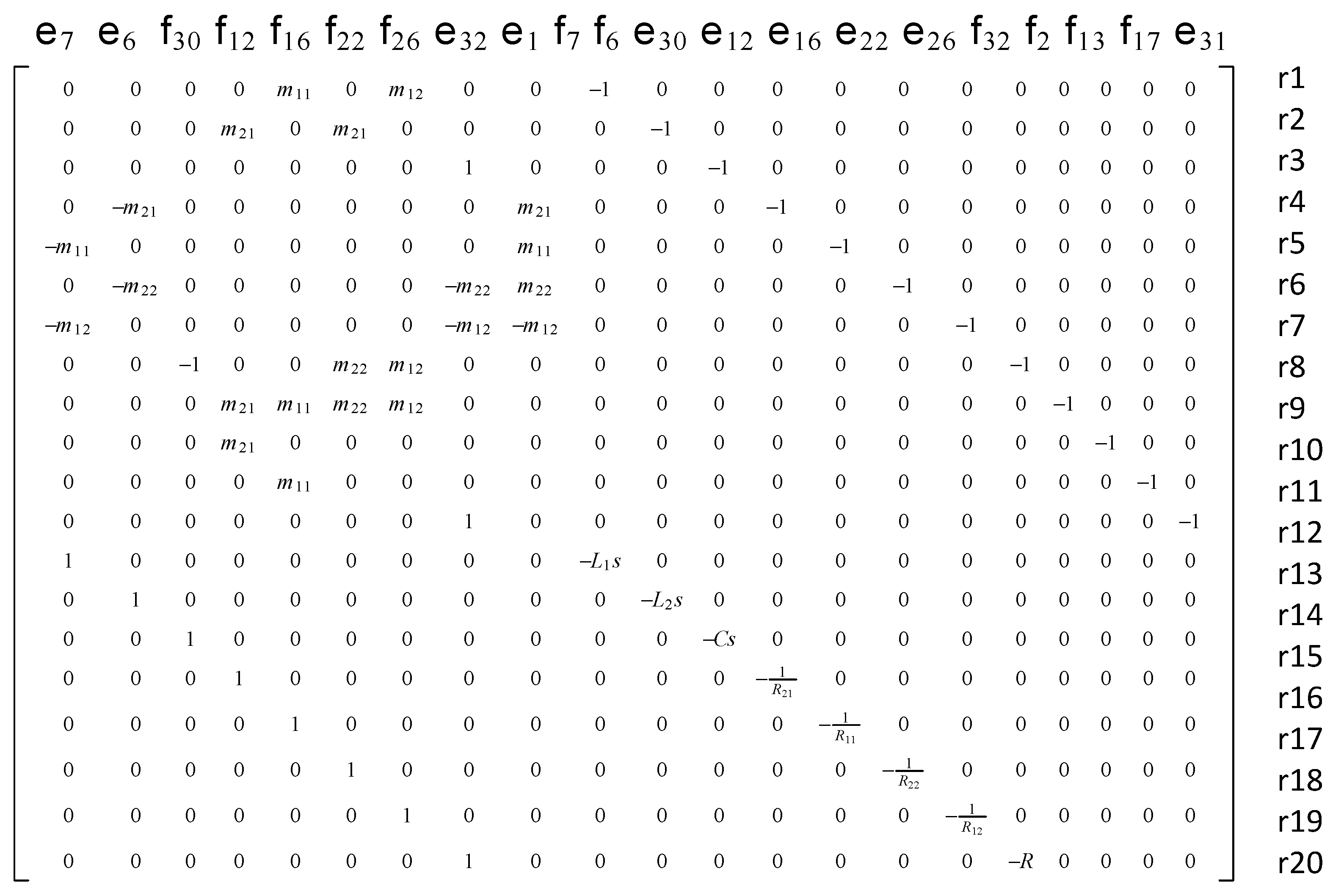
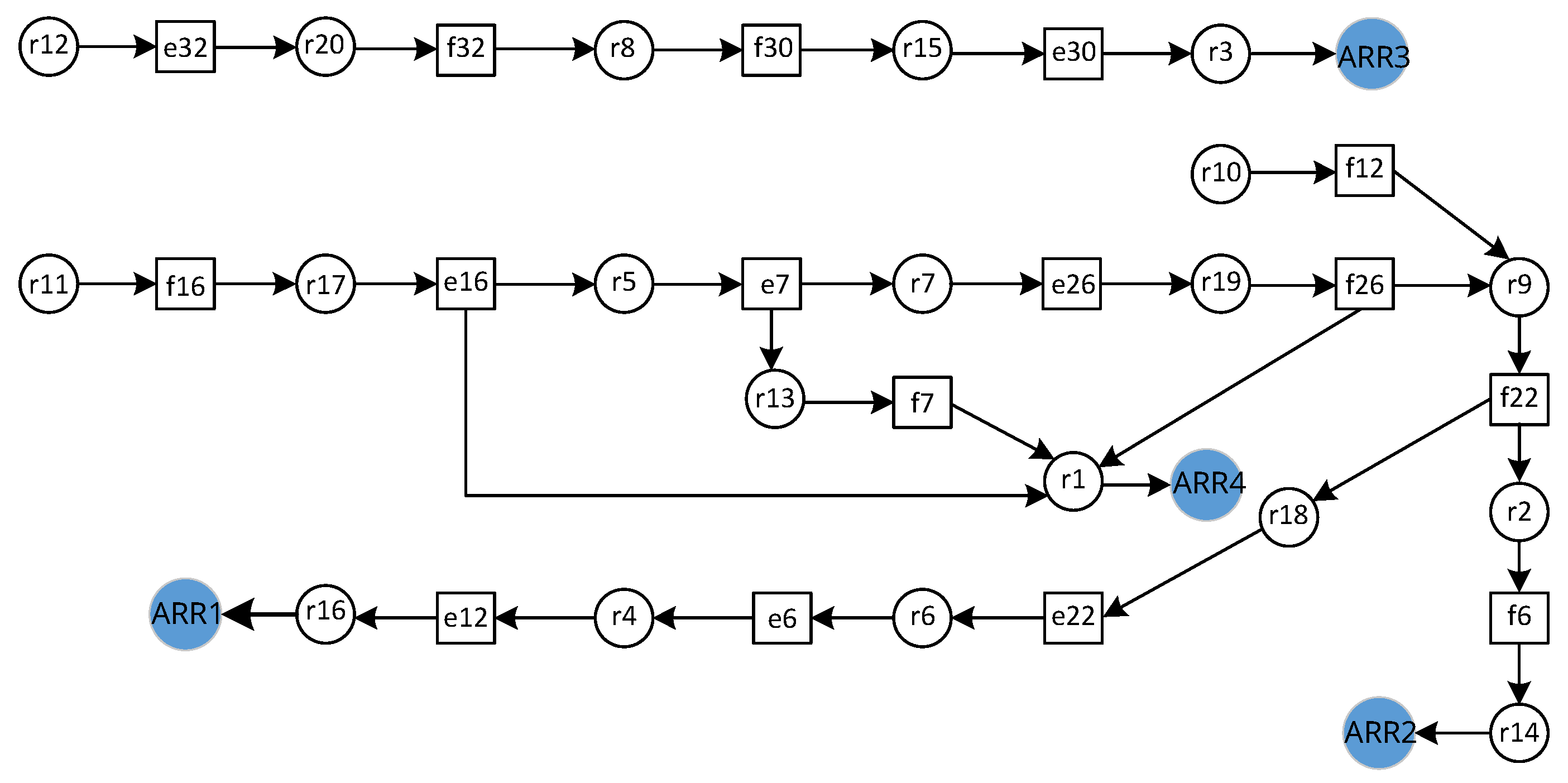
Analytic redundancy relations (ARRs) is a model-based method used for fault diagnosis. The method involves developing the mathematical models of a system and using them to detect and isolate the faults that occur in the system. The basic idea behind ARR is that a system has a number of redundant measurements, and faults can be detected by comparing the measurements with the predictions of the model. The principle of fault detection and isolation (FDI) using ARRs deduced from the BG model consists of establishing a fault or a matrix signature, as shown in Table [
32]. This method has been applied in real complex systems such as steam generator process [
33,
34] but applications in the field of power converters are limited. These relations can be symbolically generated and are therefore suitable for computer implementation. In [
35], a model builder software for fault detection and identification was developed and implemented for thermofluid processes. The fault diagnosis of an electric scooter is carried out using ARR and modified analytic redundancy relations (MARRs) in [
36,
37]. MARRs are derived to model the multiplicative faults of non-parametric components, such as actuators and sensors, by introducing efficiency factors.
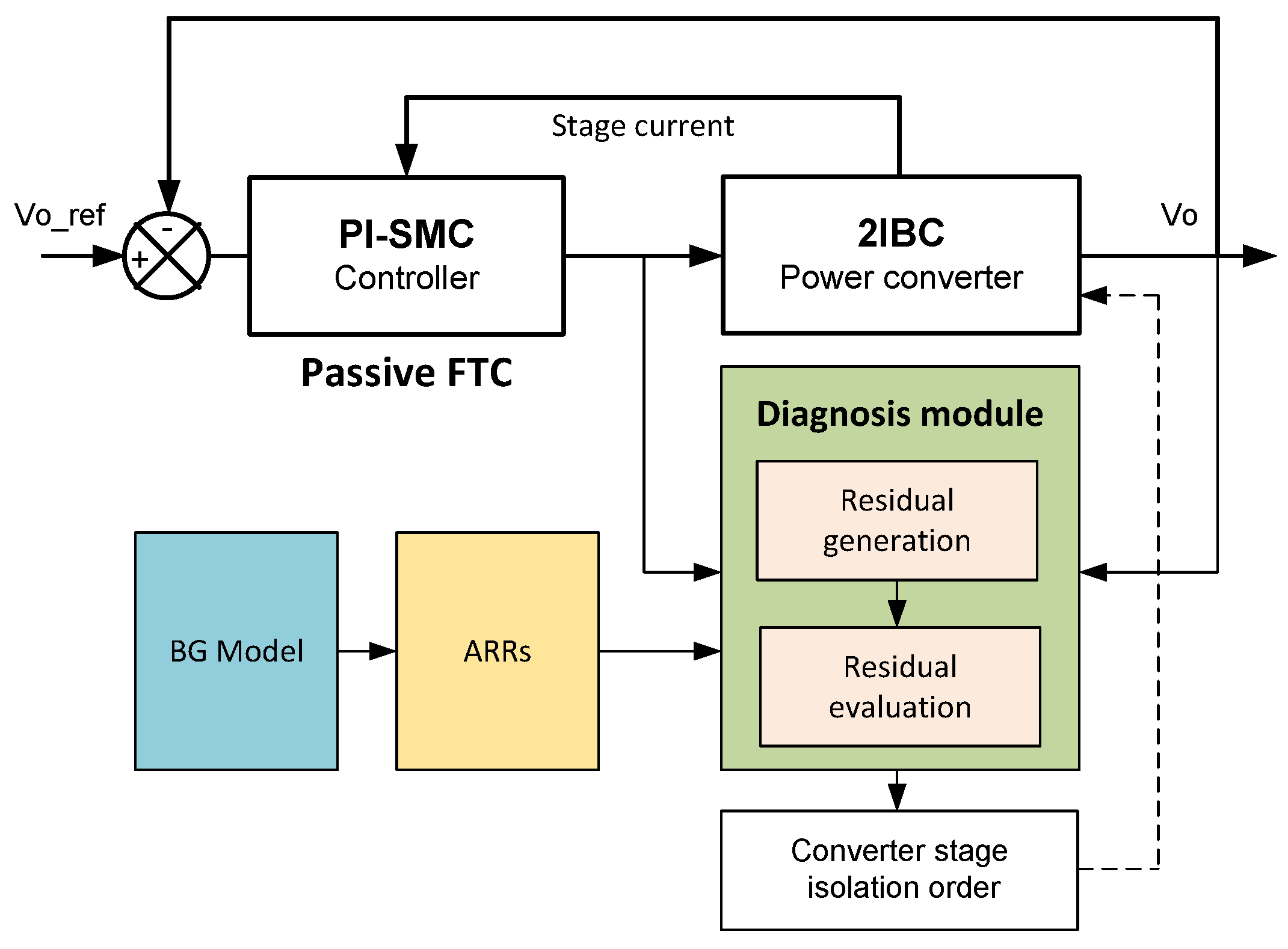
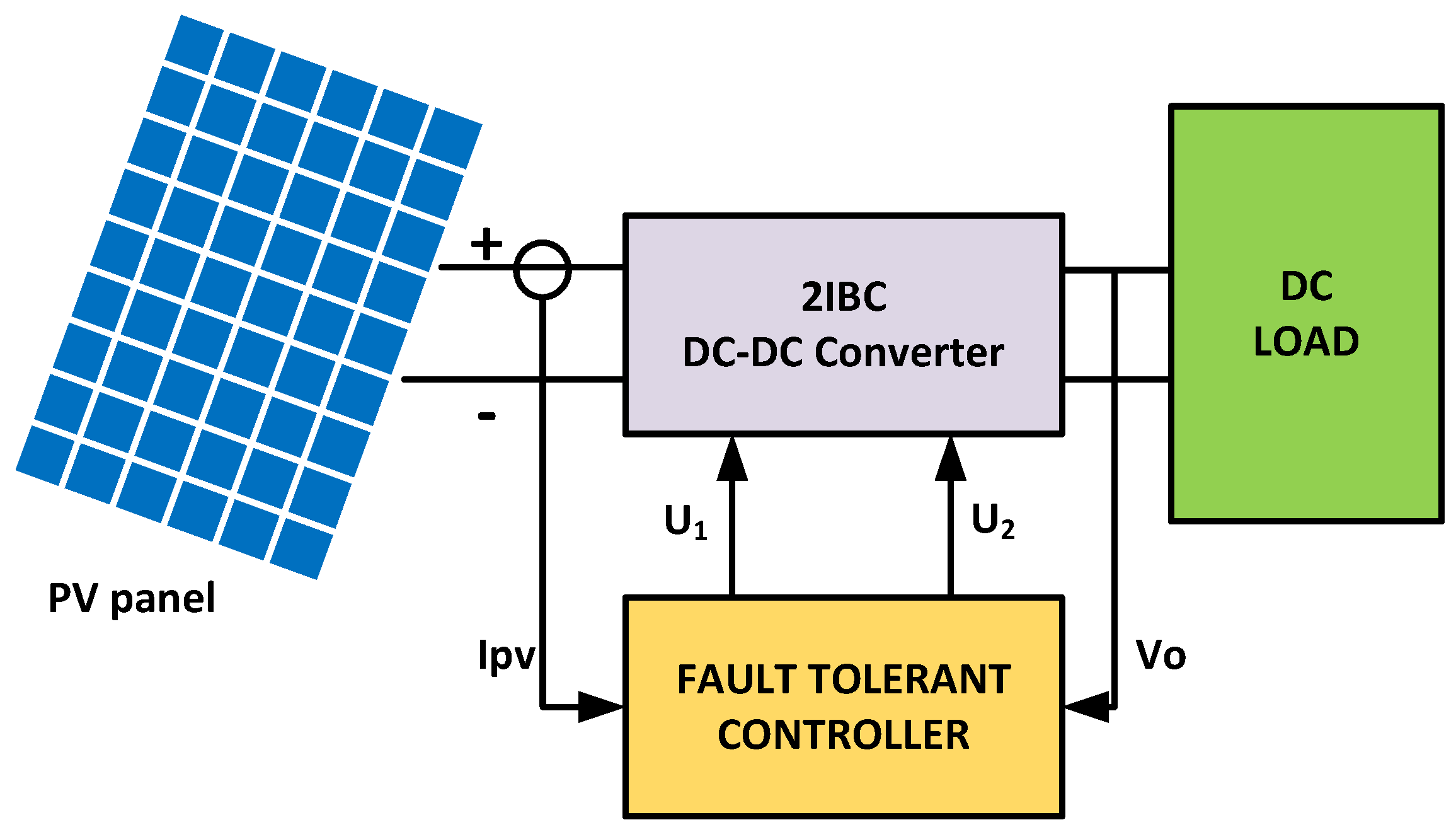
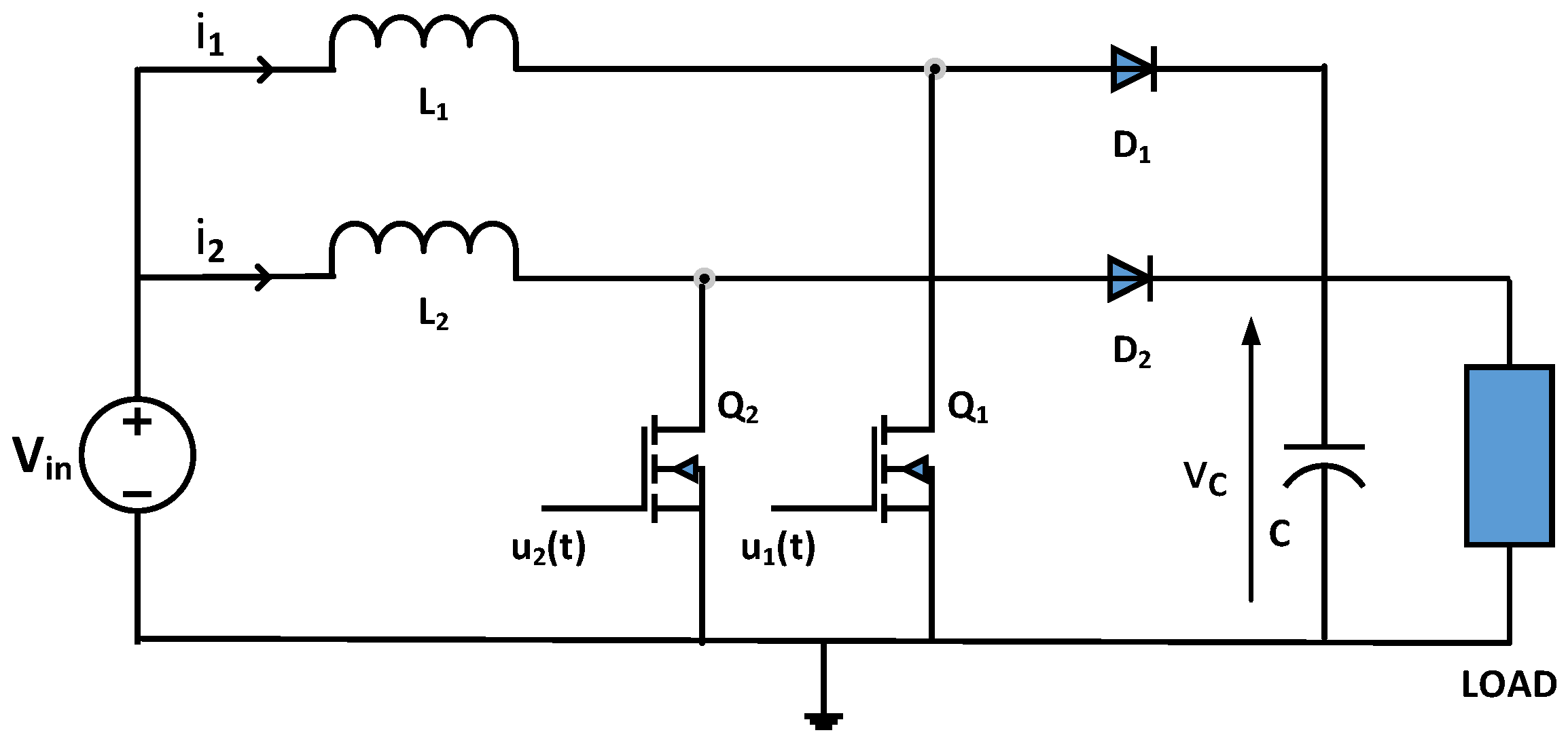
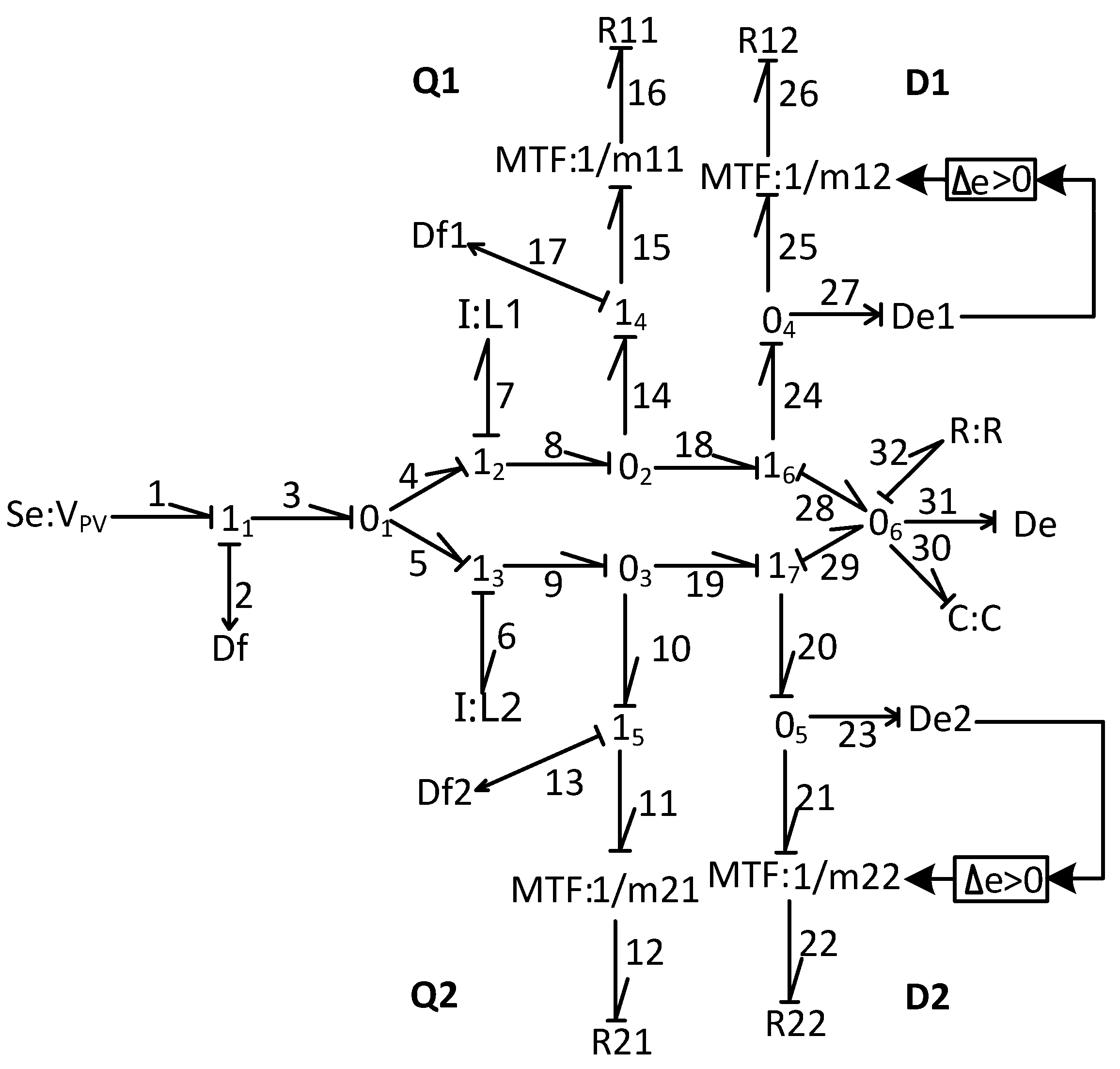
Our research work has two contributions. Firstly, we designed and implemented a cascaded PI-SMC for a two-stage interleaved boost converter (2IBC) that provides passive fault-tolerant control and ensures the continuity of power supply in the event of a stage fault. Secondly, we applied a bond graph-based fault diagnosis method that utilizes the junction structure of the converter’s BG model to deduce analytic redundancy relations through an alternated chain. This method considers discrete component faults such as the inductance and capacitor, and unlike most other articles, it constructs a table of fault signatures and evaluates residuals for the fault detection and identification of the two-stage boost converter.
The key issue with diagnosis is the use of the same ARRs to detect most of the component faults, particularly the capacitor, which should be identified more precisely. Unlike observer analytic methods that typically address only one type of fault, each component in the graphical BG model has a node. As a result, future work can easily combine artificial intelligence with automated power supply supervision to increase the performance of the diagnosis module in the case of unknown signatures.
The paper is structured as follows:
Section 2 presents the problem formulation via a case study of the proposed modular power supply and the contribution of the paper.
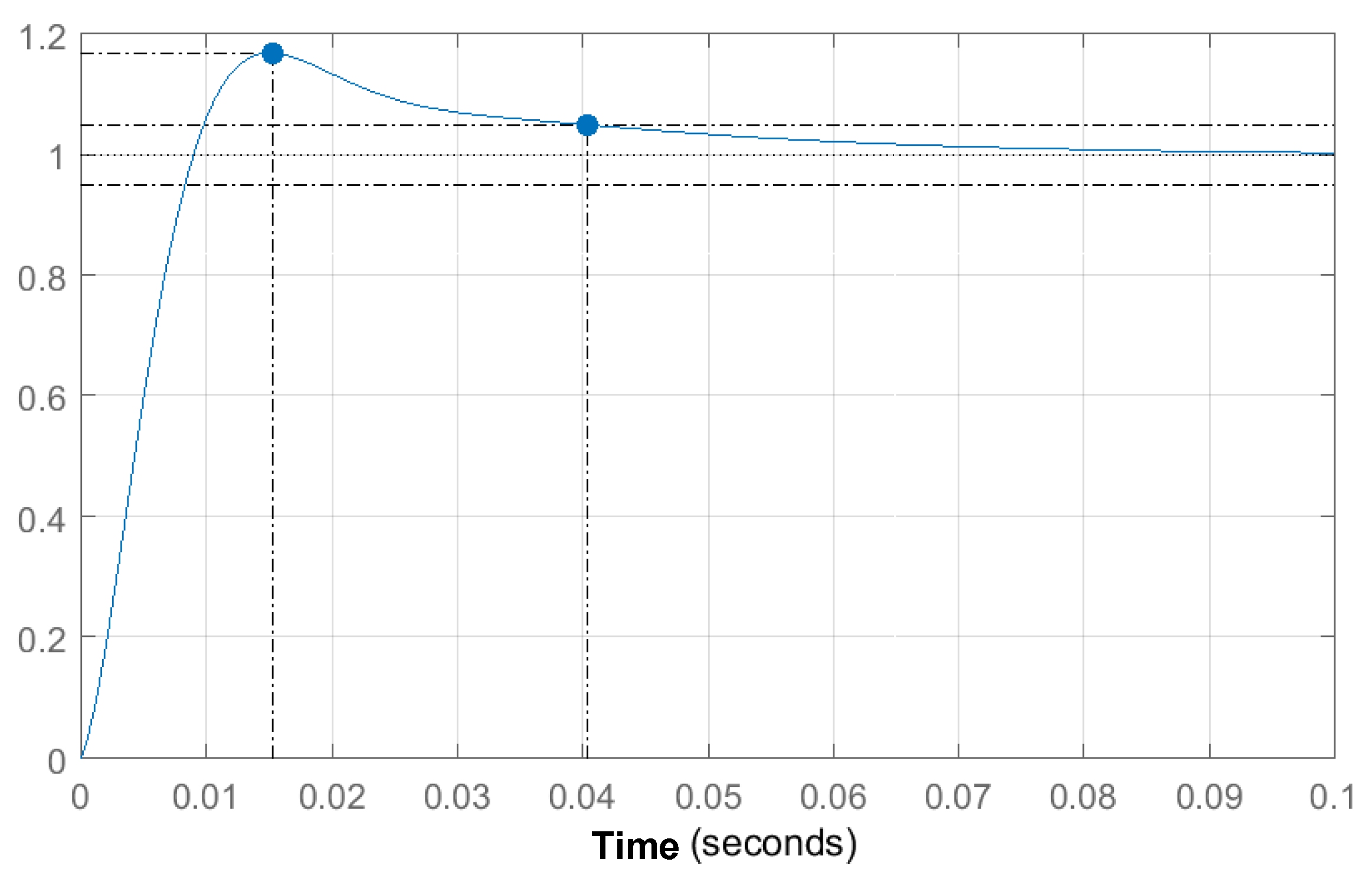
Section 3 explains the selected control strategy for the PV-based system and provides technical guidance for determining the optimal controller parameters. In
Section 4, the bond graph formalism is introduced as it applies to power converters and discusses the necessity of hybrid modeling in the same context. Additionally, this section outlines the fault diagnosis approach that is based on the evaluation of residuals to make decisions according to a fault signatures table.
Section 5 describes the implementation of the control approach and provides the simulation results of the diagnosis method. In
Section 6, the paper concludes with a summary and future directions for research.
6. Conclusions and Perspective Work
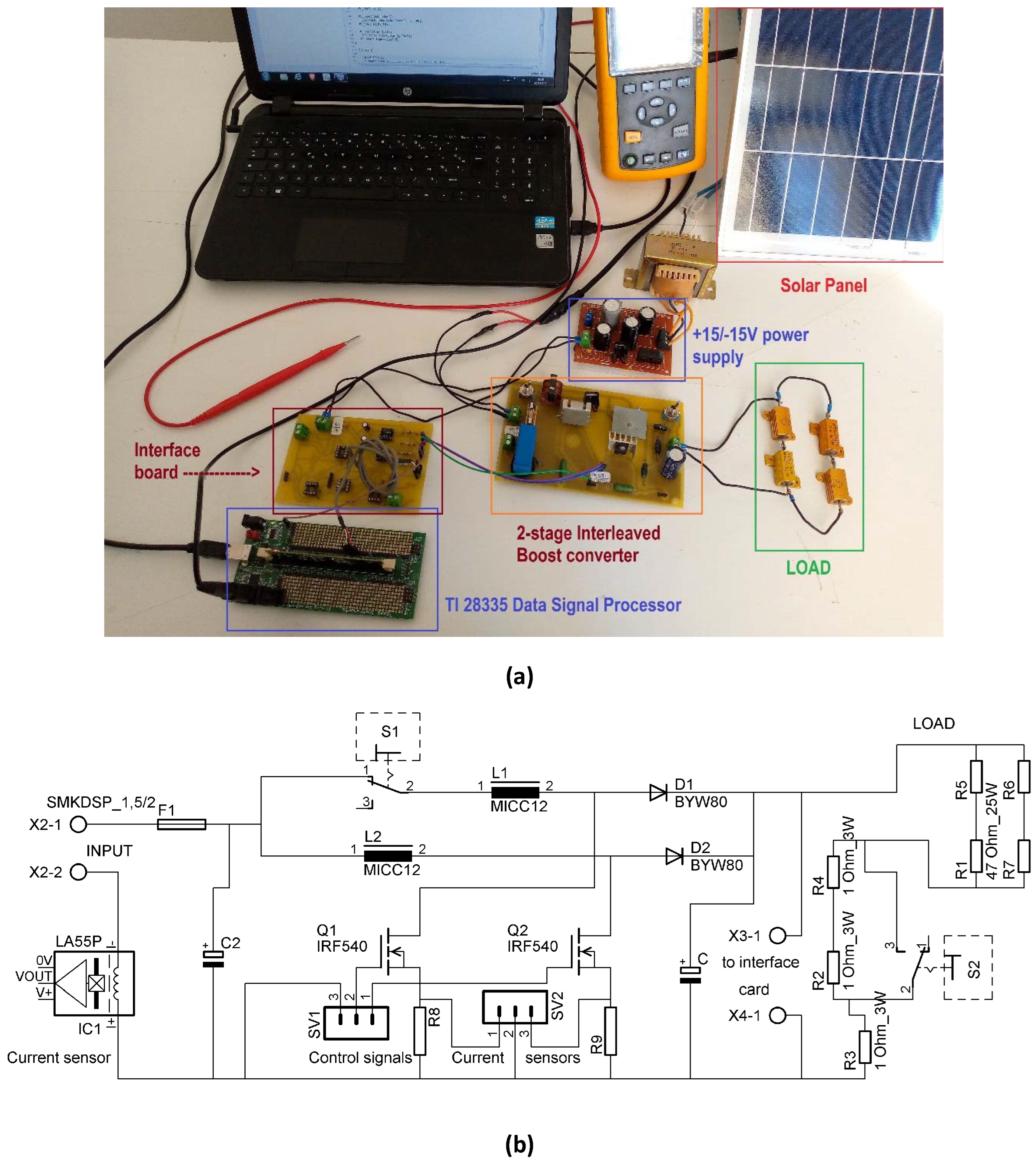
In this paper, a modular PV-based power supply was designed and implemented and an experimental prototype was constructed to validate the proposed control scheme using a real PV panel. The simulations and experimental results demonstrate that the proposed control approach provides good performance. It should be noted that this paper does not cover the variation of irradiation and temperature. Nevertheless, the control scheme can be modified with a maximum power point tracking scheme, and the proposed diagnosis method can still be applied.
Designing an algorithm for monitoring a physical process can be a challenging task. However, a graphical model that includes all the structural constraints of the process can make this task easier. In this study, a bond graph model-based diagnosis approach was applied to a two-stage DC boost converter. The results of the simulation encourage the implementation of the approach on the real process, which runs in closed loop with a cascaded PI-SMC control algorithm, providing acceptable performance indicators. The switch, sensor, and capacitor faults were successfully simulated and detected. However, the use of an adaptive threshold for the residuals could improve the results for solar panel fault detection.
The most significant work for a BG-based method is performed offline in determining ARRs, which requires an accurate model of the converter. We showed that the proposed approach does not require any learning or database for identifying more than the output capacitor fault. It will be difficult for observer and intelligent methods to treat an increased number of faults.
Identifying faults with identical signatures remains a challenge of this method. Increasing the number of analytic redundancy relations or inserting additional sensors may not always be an effective or feasible solution. To address this issue, resorting to artificial intelligence and additional data on the component reliability is necessary. Future work will focus on establishing the discrete expressions of ARRs, inserting adaptive thresholds, and resolving the detection of identical or unknown fault signatures by incorporating artificial intelligence.
Finally, with a few modifications, this prototype can be adapted to obtain 24 VDC from a 12 VDC solar panel. Additionally, with a two-stage boost converter, it is possible to achieve 24 VDC with a 6 VDC solar panel. The proposed control approach is not limited to specific output voltages and can be applied to other values. If the diagnosis method is correctly implemented, it could provide precise fault detection and enable the real-time monitoring and automated reconfiguration of the power converter.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}