

Actuators, Volume 12, Issue 3 (March 2023) – 43 articles
Cover Story (view full-size image):
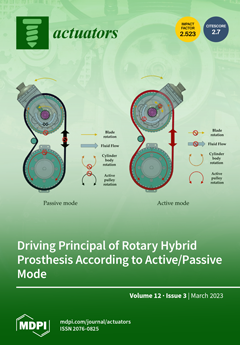
The rotary hybrid prosthesis rotates the knee joint using two approaches: one with the rotary cylinder body fixed and the blade within the rotary hydraulic cylinder rotating, and the other with the rotary blade fixed and the rotary hydraulic cylinder body itself rotating. The rotation of the motor drive module is locked in passive mode by the electrical brake of the motor drive module, which prevents the rotation of the rotary cylinder body connected to the timing belt. As a result, the rotation of the blade within the rotary cylinder is entirely responsible for knee flexion/extension. In active mode, the hydraulic nozzle fully closes, suppressing the rotation of the rotary blade. The electronic brake in the motor drive module is released, allowing the rotary hydraulic cylinder’s body to rotate using the motor power. View this paper
- Issues are regarded as officially published after their release is announced to the table of contents alert mailing list.
- You may sign up for e-mail alerts to receive table of contents of newly released issues.
- PDF is the official format for papers published in both, html and pdf forms. To view the papers in pdf format, click on the "PDF Full-text" link, and use the free Adobe Reader to open them.
Previous Issue
Next Issue