
A Memetic Algorithm for the Solution of the Resource Leveling Problem


Abstract
:1. Introduction
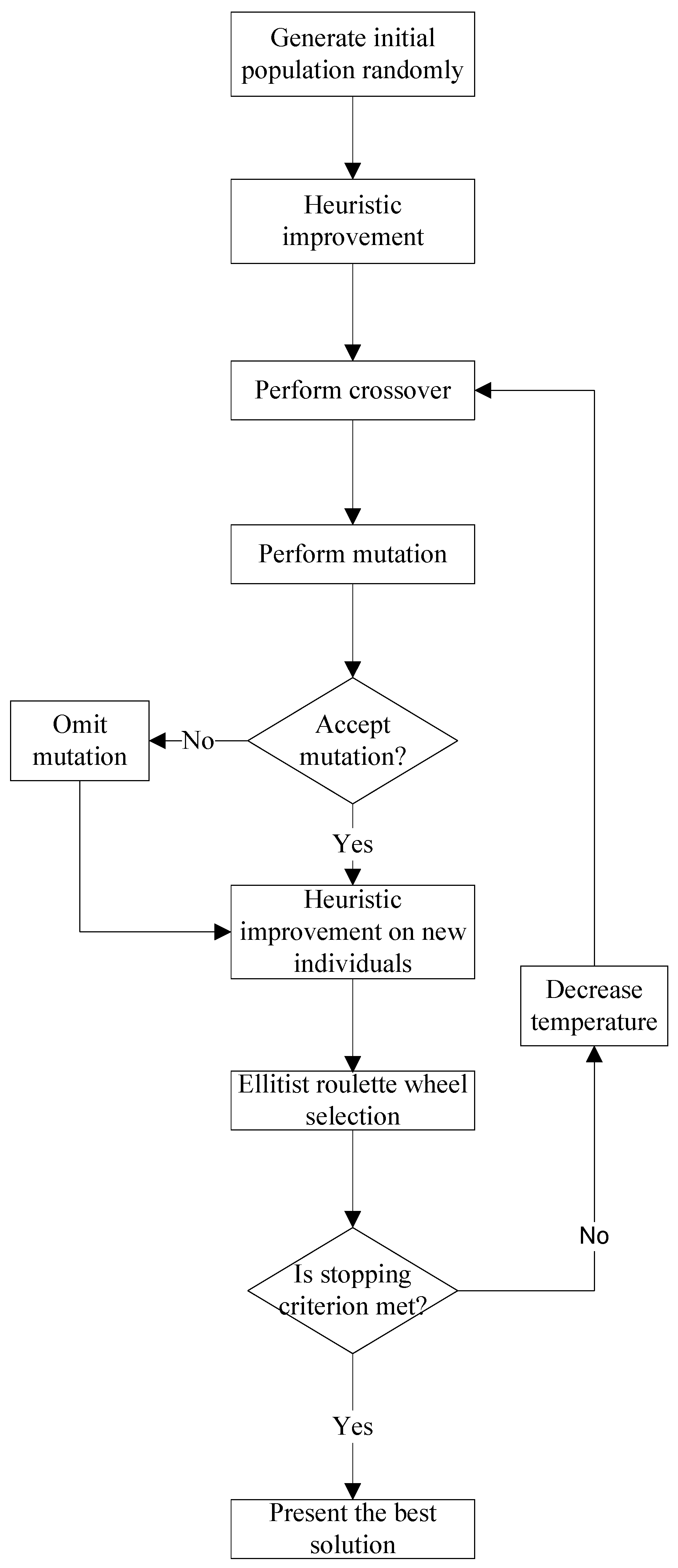
2. Methodology of the Memetic Algorithm
2.1. Chromosome Representation
2.2. Heuristic Improvement
2.3. Crossover, Mutation, and Simulated Annealing
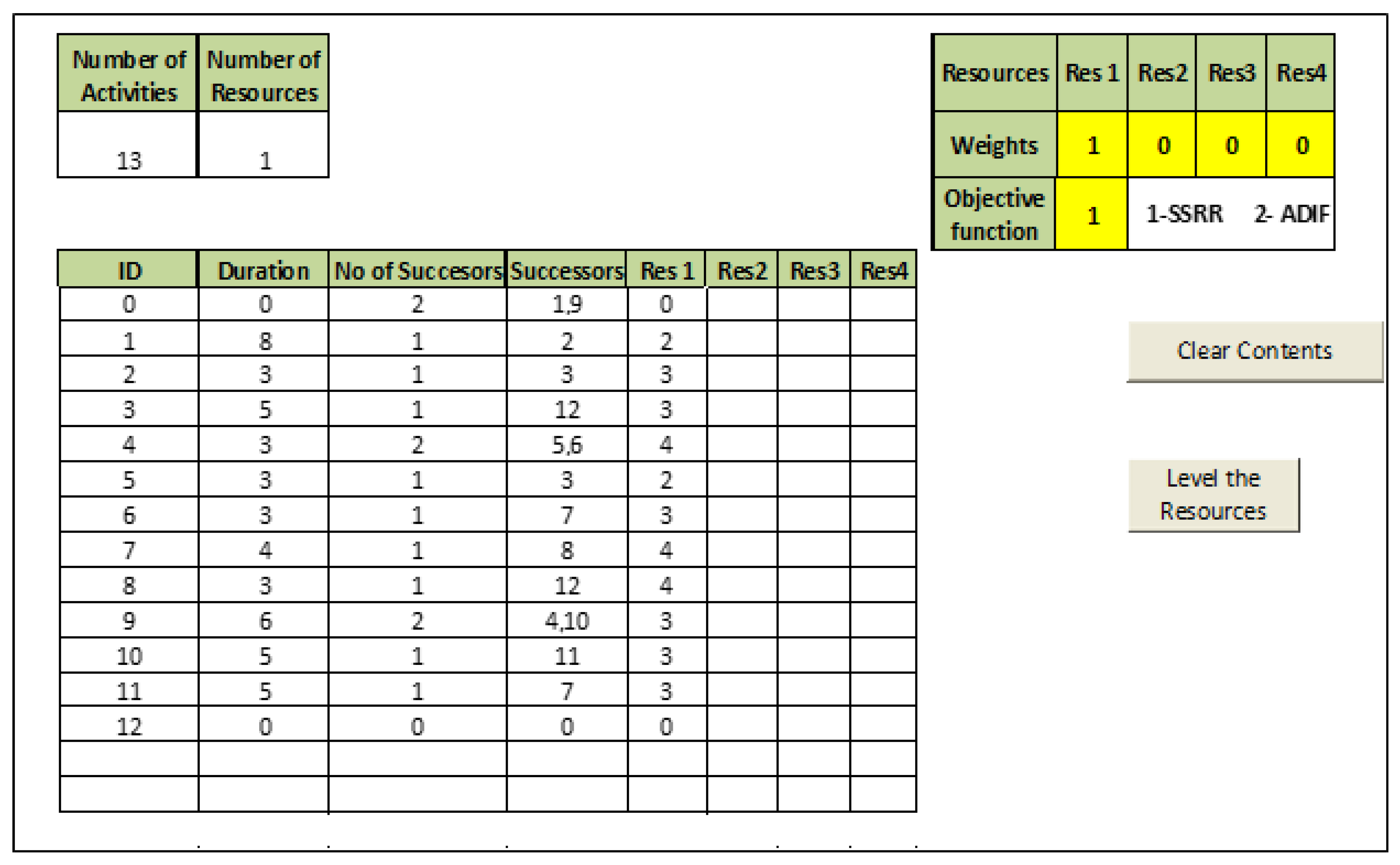
2.4. Excel Interface
3. Mixed-Integer Linear Models
3.1. Sets
3.2. Parameters
3.3. Variables
3.4. Models
3.4.1. Model for ADIF
3.4.2. Model for SSRR
3.5. Common Scheduling Constraints
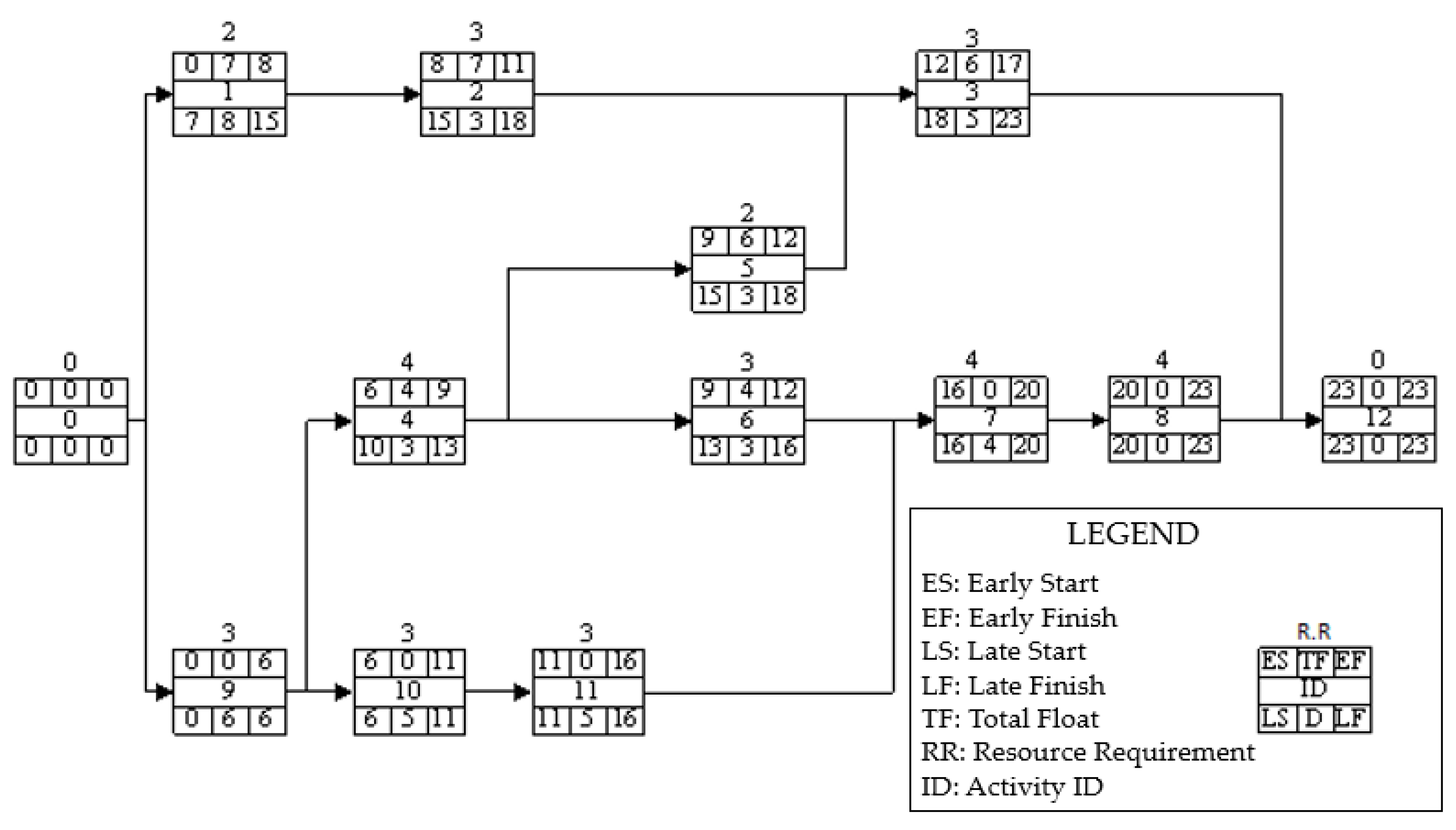
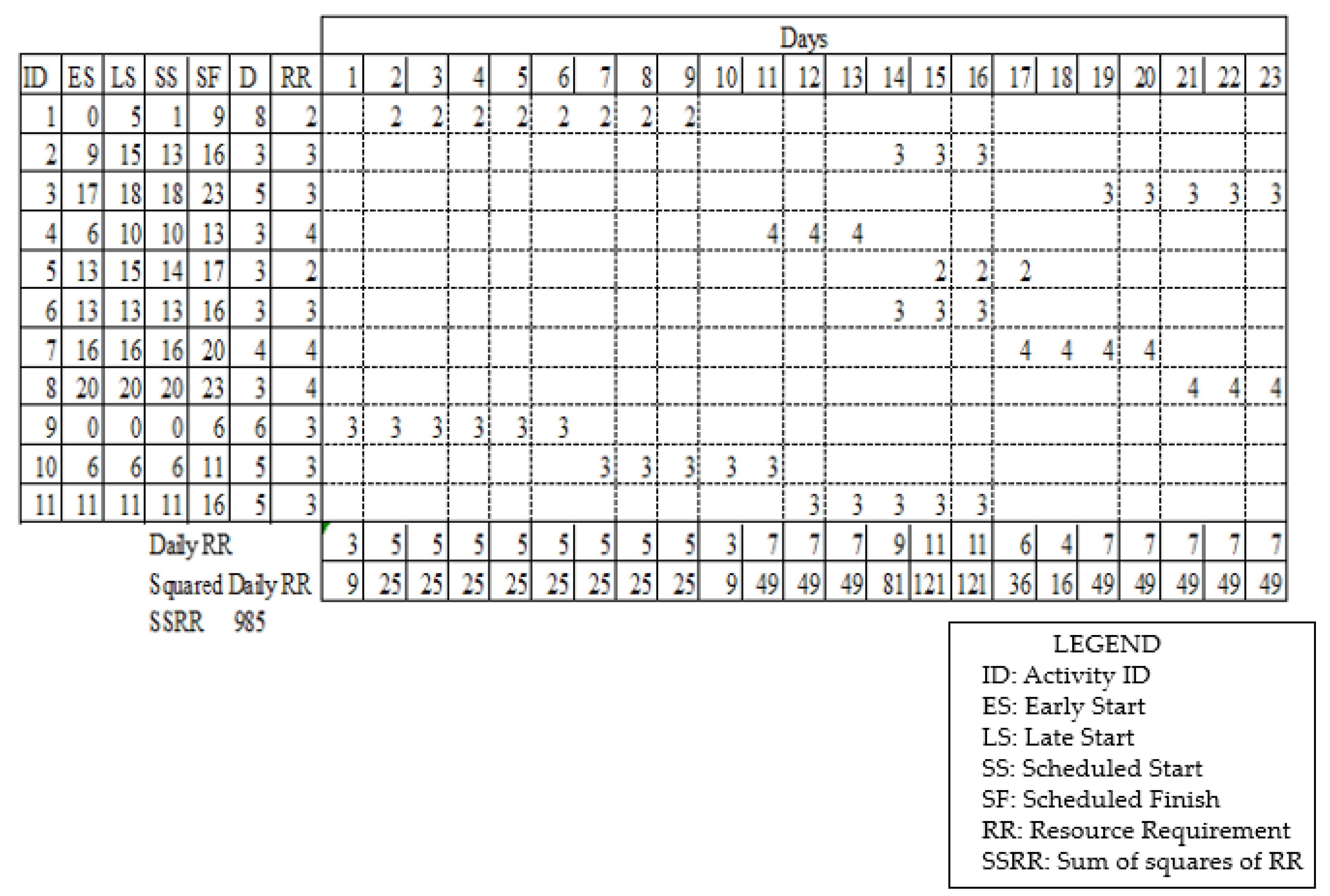
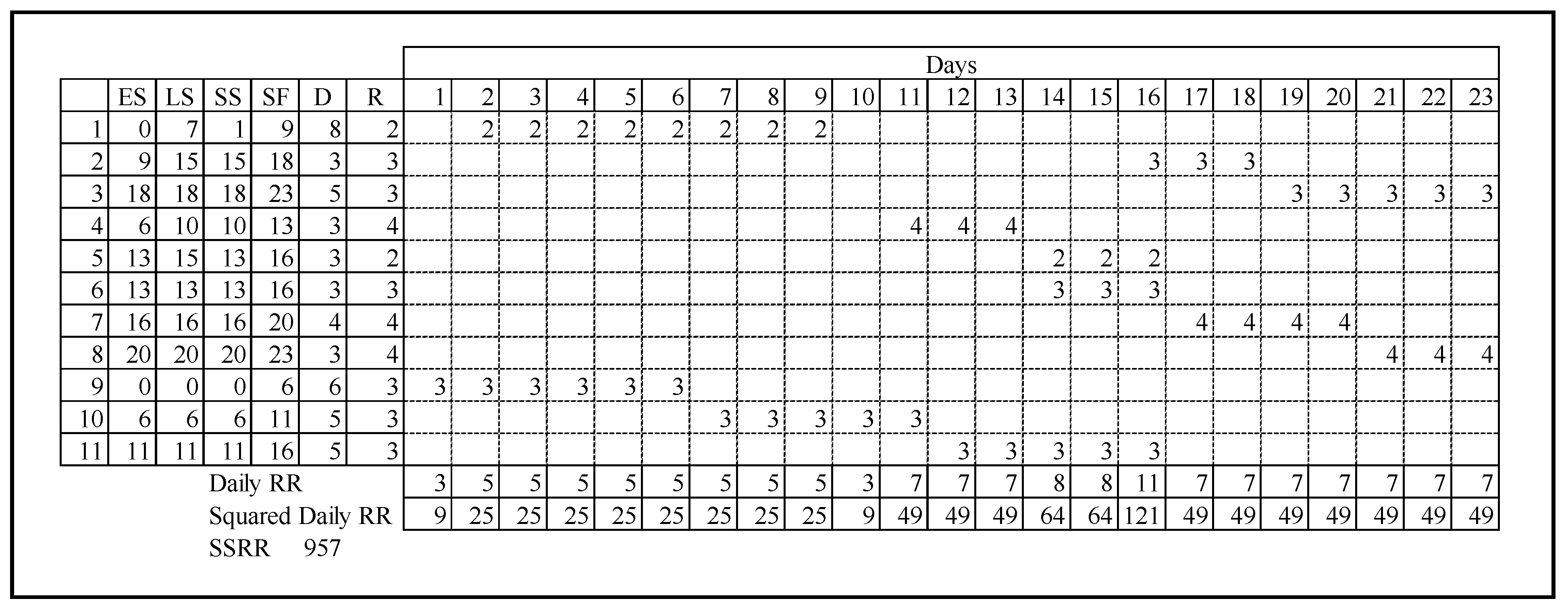
4. Illustrative Case Study
5. Computational Experiments
5.1. Single Resource Case Examples
5.2. Comparison of MA with Microsoft Project and Primavera
5.3. Comparison of the MA with State-of-the-Art Heuristic and Meta-Heuristic Methods
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tavares, L.V. Optimal resource profiles for program scheduling. Eur. J. Oper. Res. 1987, 29, 83–90. [Google Scholar] [CrossRef]
- Easa, S. Resource Leveling in Construction by Optimization. J. Constr. Eng. Manag. 1987, 115, 302–316. [Google Scholar] [CrossRef]
- Ballestin, F.; Schwindt, C.; Zimmermann, J. Resource Leveling in Make-to-Order Production: Modelling and Heuristic Solution Method. Int. J. Oper. Res. 2007, 4, 50–62. [Google Scholar]
- Son, J.; Mattila, K.G. Binary Resource Leveling Model: Activity Splitting Allowed. J. Constr. Eng. Manag. 2004, 130, 887–894. [Google Scholar] [CrossRef]
- Iranagh, M.A.; Sonmez, R. A genetic algorithm for resource leveling of construction projects. In Proceedings of the 28th Annual ARCOM Conference, Edinburgh, UK, 3–5 September 2012; pp. 1047–1055. [Google Scholar]
- Neumann, K.; Schwindt, C.; Zimmermann, J. Project Scheduling with Time Windows and Scarce Resources: Temporal and Resource-Constrained Project Scheduling with Regular and Nonregular Objective Functions; Springer: Berlin/Heidelberg, Germany, 2002; Volume 508. [Google Scholar]
- Ramlogan, R.; Goulter, I. Mixed integer model for resource allocation in project management. Eng. Optim. 1989, 15, 97–111. [Google Scholar] [CrossRef]
- Mattila, K.G.; Abraham, D.M. Resource Leveling of Linear Schedules Using Integer Linear Programming. J. Constr. Eng. Manag. 1998, 124, 232–244. [Google Scholar] [CrossRef]
- Hariga, M.; El-Sayegh, S. Cost optimization for the multi-resource leveling problem with allowed activity splitting. J. Constr. Eng. Manag. 2011, 137, 56–64. [Google Scholar] [CrossRef]
- Rieck, J.; Zimmermann, J.; Gather, T. Mixed-integer linear programing for resource leveling problems. Eur. J. Oper. Res. 2012, 221, 27–37. [Google Scholar] [CrossRef]
- Bianco, L.; Caramia, M.; Giordani, S. Resource levelling in project scheduling with generalized precedence relationships and variable execution intensities. OR Spectr. 2006, 38, 405–425. [Google Scholar] [CrossRef]
- Tarasov, I.; Haït, A.; Battaïa, O. A Generalized MILP Formulation for the Period-Aggregated Resource Leveling Problem with Variable Job Duration. Algorithms 2020, 13, 6. [Google Scholar] [CrossRef]
- Bandelloni, M.; Tucci, M.; Rinaldi, R. Optimal resource leveling using non-serial dynamic programming. Eur. J. Oper. Res. 1994, 78, 162–177. [Google Scholar] [CrossRef]
- Mutlu, M.Ç. A Branch and Bound Algorithm for Resource Leveling Problem. Master’s Thesis, Middle East Technical University, Ankara, Turkey, 2010. [Google Scholar]
- Gather, T.; Zimmermann, J.; Bartels, J.H. Exact methods for the resource leveling problem. J. Sched. 2011, 14, 557–569. [Google Scholar] [CrossRef]
- Bettemir, Ö.H.; Erzurum, T. Kaynak Dengeleme Probleminin Arama Uzayını Paralel Programlama ile Tarayarak Kesin Çözümü. Tek. Dergi 2021, 32, 10767–10805. [Google Scholar] [CrossRef]
- Burgess, A.R.; Killebrew, J.B. Variation in Activity Level on a Cyclic Arrow Diagram. J. Ind. Eng. 1962, 13, 76–83. [Google Scholar]
- He, L.; Zhang, L. Dynamic priority rule-based forward-backward heuristic algorithm for resource levelling problem in construction project. J. Oper. Res. Soc. 2013, 64, 1106–1117. [Google Scholar] [CrossRef]
- Harris, R.B. Packing Method for Resource Leveling (PACK). J. Constr. Eng. Manag. 1990, 116, 331–350. [Google Scholar] [CrossRef]
- Hiyassat, M.A.S. Applying Modified Minimum Moment Method to Multiple Resource Leveling. J. Constr. Eng. Manag. 2001, 127, 192–198. [Google Scholar] [CrossRef]
- Chan, W.T.; Chua, D.K.H.; Kannan, G. Construction Resource Scheduling with Genetic Algorithms. J. Constr. Eng. Manag. 1996, 122, 125–132. [Google Scholar] [CrossRef]
- Hegazy, T. Optimization of Resource Allocation and Leveling Using Genetic Algorithms. J. Constr. Eng. Manag. 1999, 125, 167–175. [Google Scholar] [CrossRef]
- Leu, S.; Yang, C.; Huang, J. Resource Leveling in Construction by Genetic Algorithm-Based Optimization and Its Decision Support System Application. Autom. Constr. 2000, 10, 27–41. [Google Scholar] [CrossRef]
- El-Rayes, K.; Jun, D.H. Optimizing Resource Leveling in Construction Projects. J. Constr. Eng. Manag. 2009, 135, 1172–1180. [Google Scholar] [CrossRef]
- Ponz-Tienda, J.L.; Yepes, V.; Pellincer, E.; Moreno-Flores, J. The Resource Leveling Problem with multiple resource using adaptive genetic algorithm. Autom. Constr. 2013, 29, 161–172. [Google Scholar] [CrossRef]
- Li, H.; Demeulemeester, E. A genetic algorithm for the robust resource leveling problem. J. Sched. 2016, 19, 43–60. [Google Scholar] [CrossRef]
- Li, H.; Xiong, L.; Liu, Y.; Li, H. An effective genetic algorithm for the resource levelling problem with generalised precedence relations. Int. J. Prod. Res. 2018, 56, 2054–2075. [Google Scholar] [CrossRef]
- Li, H.; Zheng, L.; Zhu, H. Resource leveling in projects with flexible structures. Ann. Oper. Res. 2023, 321, 311–342. [Google Scholar] [CrossRef]
- Savin, D.; Alkass, S.; Fazio, P. A procedure for calculating the weight-matrix of a neural network for resource leveling. Adv. Eng. Softw. 1997, 28, 271–283. [Google Scholar] [CrossRef]
- Kartam, N.; Tongthong, T. An artificial neural network for resource leveling problems. Artif. Intell. Eng. Des. Anal. Manuf. 1998, 12, 273–287. [Google Scholar] [CrossRef]
- Qi, J.X.; Wang, Q.; Guo, X.Z. Improved particle swarm optimization for resource leveling problem. In Proceedings of the 6th International Conference on Machine Learning and Cybernetics, Hong Kong, China, 19–22 August 2007; pp. 896–901. [Google Scholar]
- Geng, J.Q.; Weng, L.P.; Liu, S.H. An improved ant colony optimization algorithm for nonlinear resource leveling problems. Comput. Math. Appl. 2011, 61, 2300–2305. [Google Scholar] [CrossRef]
- Xu, X.; Hao, J.; Zheng, Y. Multi-objective artificial bee colony algorithm for multi-stage resource leveling problem in sharing logistics network. Comput. Ind. Eng. 2020, 142, 106338. [Google Scholar] [CrossRef]
- Li, H.; Dong, X. Multi-mode resource leveling in projects with mode-dependent generalized precedence relations. Expert Syst. Appl. 2018, 97, 193–204. [Google Scholar] [CrossRef]
- Li, H.; Wang, M.; Dong, X. Resource leveling in projects with stochastic minimum time lags. J. Constr. Eng. Manag. 2019, 145, 04019015. [Google Scholar] [CrossRef]
- Prayogo, D.; Cheng, M.Y.; Wong, F.T.; Tjandra, D.; Tran, D.H. Optimization model for construction project resource leveling using a novel modified symbiotic organisms search. Asian J. Civ. Eng. 2018, 19, 625–638. [Google Scholar] [CrossRef]
- Son, J.; Skibniewski, M.J. Multiheuristic Approach for Resource Leveling Problem in Construction Engineering: Hybrid Approach. J. Constr. Eng. Manag. 1999, 125, 23–31. [Google Scholar] [CrossRef]
- Doulabi, S.H.H.; Seifi, A.; Shariat, S.Y. Efficient Hybrid Genetic Algorithm for Resource Leveling via Activity Splitting. J. Constr. Eng. Manag. 2011, 137, 137–146. [Google Scholar] [CrossRef]
- Alsayegh, H.; Hariga, M. Hybrid meta-heuristic methods for the multi-resource leveling problem with activity splitting. Autom. Constr. 2012, 27, 89–98. [Google Scholar] [CrossRef]
- Koulinas, G.K.; Anagnostopoulos, K.P. A new tabu search-based hyper-heuristic algorithm for solving construction levelling problems with limited resource availabilities. Autom. Constr. 2013, 31, 169–175. [Google Scholar] [CrossRef]
- Xu, H.Z.; Demeulemeester, E. Scheduling policies for the stochastic resource leveling problem. J. Constr. Eng. Manag. 2015, 141, 04014072. [Google Scholar]
- Abadi, N.S.; Bagheri, N.; Assadi, M. Multiobjective model for solving resource-leveling problem with discounted cash flows. Int. Trans. Oper. Res. 2018, 25, 2009–2030. [Google Scholar] [CrossRef]
- Rudolph, G. Convergence properties of canonical genetic algorithms. IEEE Trans. Neural Netw. 1994, 5, 96–101. [Google Scholar] [CrossRef]
- Leung, Y.; Gao, Y.; Xu, Z.B. Degree of population diversity-a perspective on premature convergence in genetic algorithms and its Markov-chain analysis. IEEE Trans. Neural Netw. 1997, 8, 1165–1176. [Google Scholar] [CrossRef]
- Hajek, B. Cooling schedules for optimal annealing. Math. Oper. Res. 1988, 13, 311–329. [Google Scholar] [CrossRef]
- Hwang, S.F.; He, R.S. Improving real-parameter genetic algorithm with simulated annealing for engineering problems. Adv. Eng. Softw. 2006, 37, 406–418. [Google Scholar] [CrossRef]
- Wang, L.; Zheng, D.Z. An effective hybrid optimization strategy for job-shop scheduling problems. Comput. Oper. Res. 2001, 28, 585–596. [Google Scholar] [CrossRef]
- Sonmez, R.; Bettemir, O.H. A hybrid genetic algorithm for the discrete time–cost trade-off problem. Expert Syst. Appl. 2012, 39, 11428–11434. [Google Scholar] [CrossRef]
- Chen, P.H.; Shahandashti, S.M. Hybrid of genetic algorithm and simulated annealing for multiple project scheduling with multiple resource constraints. Autom. Constr. 2009, 18, 434–443. [Google Scholar] [CrossRef]
- Bettemir, Ö.H.; Sonmez, R. Hybrid genetic algorithm with simulated annealing for resource-constrained project scheduling. J. Manag. Eng. 2015, 31, 04014082. [Google Scholar] [CrossRef]
- Blum, C.; Roli, A. Hybrid Metaheuristics: An Introduction. Stud. Comput. Intell. 2015, 114, 1–30. [Google Scholar]
- Neri, F.; Cotta, C.; Moscato, P. (Eds.) Handbook of Memetic Algorithms; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Hartmann, S.; Briskorn, D. An updated survey of variants and extensions of the resource-constrained project scheduling problem. Eur. J. Oper. Res. 2022, 297, 1–14. [Google Scholar] [CrossRef]
- Piryonesi, S.M.; Nasseri, M.; Ramezani, A. Resource leveling in construction projects with activity splitting and resource constraints: A simulated annealing optimization. Can. J. Civ. Eng. 2019, 46, 81–86. [Google Scholar] [CrossRef]
- Selvam, G.; Tadepalli, T.C. Genetic algorithm based optimization for resource leveling problem with precedence constrained scheduling. Int. J. Constr. Manag. 2019, 1–10. [Google Scholar] [CrossRef]
- Duraiswamy, A.; Selvam, G. An Ant Colony-Based Optimization Model for Resource-Leveling Problem. In Advances in Construction Management: Select Proceedings of the ACMM 2021, Chengdu, China, 20–24 October 2021; Springer: Singapore, 2022; pp. 333–342. [Google Scholar]
- Damci, A.; Polat, G.; Akin, F.D.; Turkoglu, H. Use of float consumption rate in resource leveling of construction projects. Front. Eng. Manag. 2022, 9, 135–147. [Google Scholar] [CrossRef]
- Prayogo, D.; Kusuma, C.T. Optimization of resource leveling problem under multiple objective criteria using a symbiotic organisms search. Civ. Eng. Dimens. 2019, 21, 43–51. [Google Scholar] [CrossRef]
- Holland, J.H. Adaptation in Natural and Artificial Systems; University of Michigan Press: Ann Arbor, MI, USA, 1975. [Google Scholar]
- Moscato, P.; Norman, M.G. A Memetic approach for the traveling salesman problem implementation of a computational ecology for combi-combinatorial optimization on message-passing systems. Parallel Comput. Transp. Appl. 1992, 177–186. [Google Scholar]
- Kirkpatrick, S.; Gelatt, C.D.; Vecchi, M.P. Optimization by simulated annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef] [PubMed]
- Iranagh, M.A.; Atan, T.; Sonmez, R. A mixed-integer linear model for optimization of resource idle days in project scheduling. In Proceedings of the Creative Construction Conference, Budapest, Hungary, 6–9 July 2013; pp. 368–381. [Google Scholar]
- Kolisch, R.; Hartmann, S. Experimental investigation of heuristics for resource-constrained project scheduling: An update. Eur. J. Oper. Res. 2006, 174, 23–37. [Google Scholar] [CrossRef]
- Liberatore, M.J.; Pollack-Johnson, B.; Smith, C.A. Project management in construction: Software use and research directions. J. Constr. Eng. Manag. 2001, 127, 101–107. [Google Scholar] [CrossRef]
- Kolisch, R.; Sprecher, A. PSPLIB—A Project Scheduling Library. Eur. J. Oper. Res. 1997, 96, 205–216. [Google Scholar] [CrossRef]
- Debels, D.; Vanhoucke, M. A decomposition-based genetic algorithm for the resource-constrained project-scheduling problem. Oper. Res. 2007, 55, 457–469. [Google Scholar] [CrossRef]
- Barr, R.S.; Golden, B.L.; Kelly, J.P.; Resende, M.G.; Stewart, W.R. Designing and reporting on computational experiments with heuristic methods. J. Heuristics 1995, 1, 9–32. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Source | No. of Activities | Metric | Optimal | MA | Time (s) |
|---|---|---|---|---|---|
| Son and Skibniewski (1999) [37] | 11 | SSRR | 915 | 915 | 3.4 |
| Son and Skibniewski (1999) [37] | 13 | SSRR | 6225 | 6225 | 1.9 |
| El-Rayes and Jun (2009) [24] | 20 | SSRR | 3059 | 3059 | 2.5 |
| El-Rayes and Jun (2009) [24] | 20 | ADIF | 90 | 90 | 2.5 |
| Instance | MSP | Primavera 6.7 | This Study | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Set | STD | IDA | IDD | TFA | TFD | ESA | ESD | LFA | LFD | MA | T. (s) |
| J30 (15) | 47.5 | 42.9 | 48.9 | 48.0 | 43.6 | 45.0 | 41.8 | 45.9 | 44.4 | 0.5 | 4.7 |
| J60 (15) | 54.6 | 59.1 | 62.0 | 49.4 | 54.0 | 61.3 | 52.4 | 46.3 | 57.5 | 0.0 | 8.3 |
| J120 (15) | 51.9 | 54.4 | 50.4 | 38.1 | 57.9 | 66.2 | 53.0 | 45.0 | 59.7 | 0.1 | 15.8 |
| Average | 51.3 | 52.1 | 53.8 | 45.2 | 51.8 | 57.5 | 49.1 | 45.7 | 53.9 | 0.2 | 9.6 |
| AGA [23] | Burgess2 | MA (This Study) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Instance | APD | No. of | Time | APD | No. of | Time | APD | No. of | Time |
| Set | (%) | Optimal | (s) | (%) | Optimal | (s) | (%) | Optimal | (s) |
| J30 (480) | 0.7 | 76 | 15 | 3.6 | 14 | 12.6 | 0.2 | 232 | 12.6 |
| J60 (480) | 2.3 | NA | NA | 3.1 | NA | 18.3 | 0.0 | NA | 18.3 |
| J120 (480) | 3.7 | NA | NA | 2.1 | NA | 27.6 | 0.1 | NA | 27.6 |
| Average: | 2.2 | 2.9 | 19.5 | 0.1 | 19.5 | ||||
| AGA [23] | Burgess2 | MA (This Study) | ||||
|---|---|---|---|---|---|---|
| Instance | IES | Time | IES | Time | IES | Time |
| Set | (%) | (s) | (%) | (s) | (%) | (s) |
| J30 (480) | 18.2 | 15 | 15.9 | 12.6 | 18.6 | 12.6 |
| J60 (480) | 23.1 | NA | 22.5 | 18.3 | 24.7 | 18.3 |
| J120 (480) | 27.9 | NA | 29.0 | 27.6 | 30.3 | 27.6 |
| Average: | 23.1 | 22.5 | 19.5 | 24.5 | 19.5 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iranagh, M.; Sonmez, R.; Atan, T.; Uysal, F.; Bettemir, Ö.H. A Memetic Algorithm for the Solution of the Resource Leveling Problem. Buildings 2023, 13, 2738. https://doi.org/10.3390/buildings13112738
Iranagh M, Sonmez R, Atan T, Uysal F, Bettemir ÖH. A Memetic Algorithm for the Solution of the Resource Leveling Problem. Buildings. 2023; 13(11):2738. https://doi.org/10.3390/buildings13112738
Chicago/Turabian StyleIranagh, Mehdi, Rifat Sonmez, Tankut Atan, Furkan Uysal, and Önder Halis Bettemir. 2023. "A Memetic Algorithm for the Solution of the Resource Leveling Problem" Buildings 13, no. 11: 2738. https://doi.org/10.3390/buildings13112738