
Theoretical Study on Thermal Stresses of Metal Bars with Different Moduli in Tension and Compression


Abstract
:1. Introduction
2. Problem Description
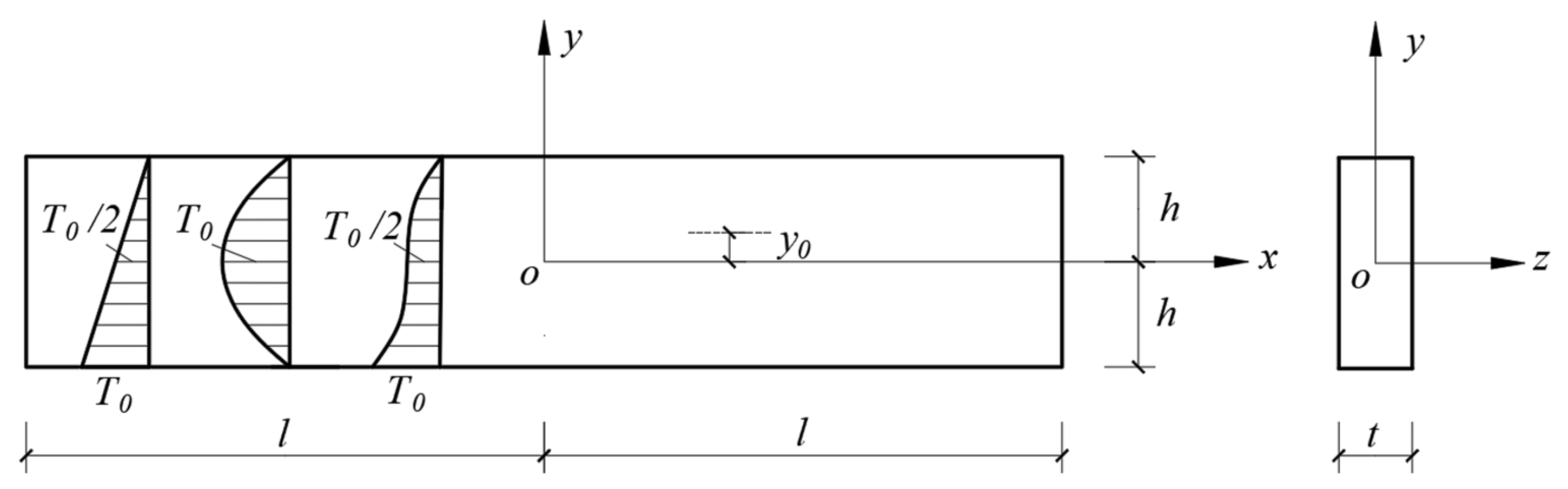
2.1. Problem
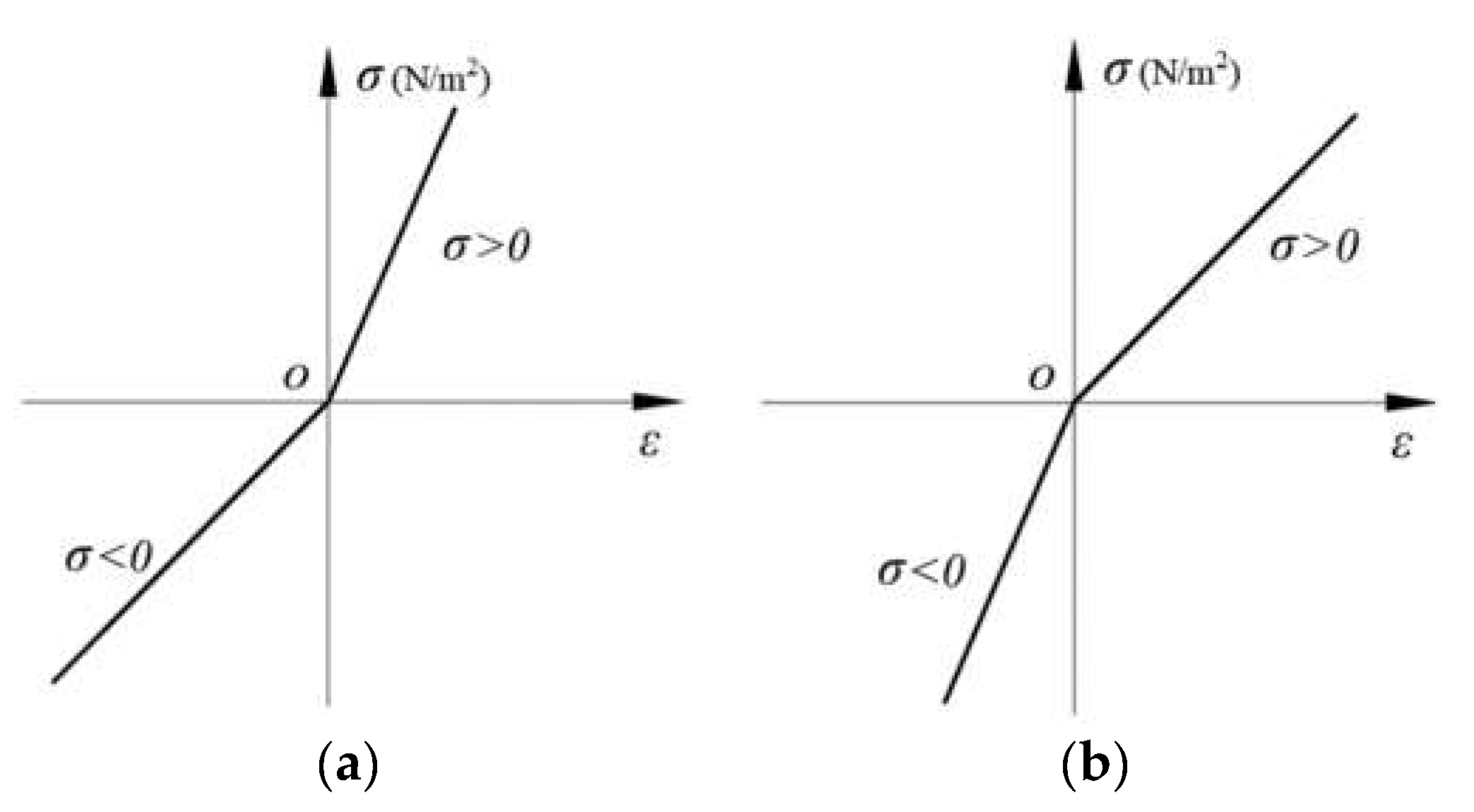
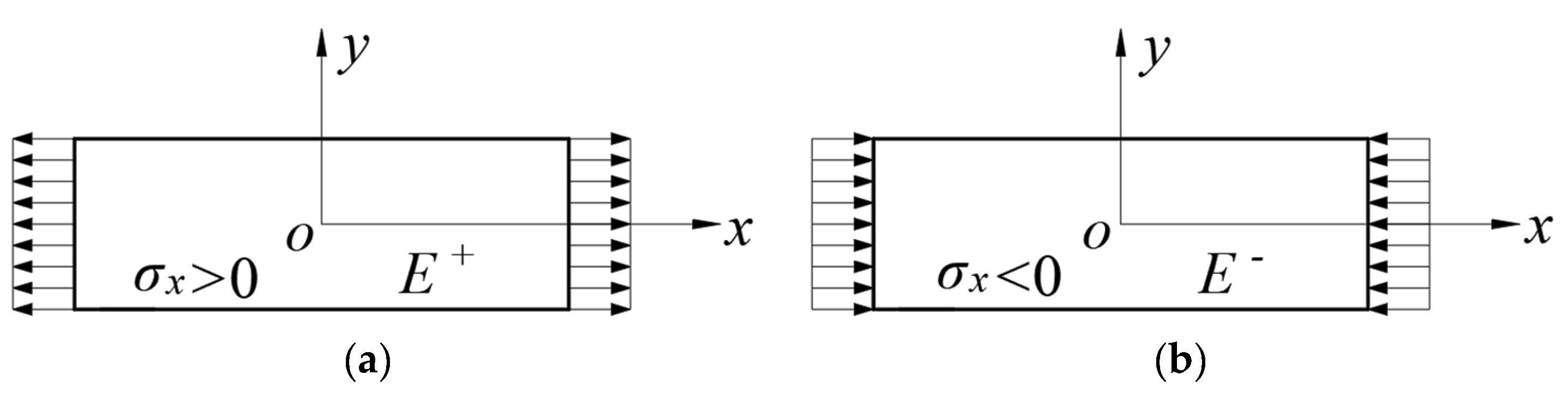
2.2. Bimodular Effect
3. Two Basic Methods
3.1. Strain Suppression Method
3.2. Thermoelasticity Method
4. One-Dimensional Solution Based on Strain Suppression Method
4.1. Case 1:
4.2. Case 2:
4.3. Case 3:
5. Two-Dimensional Thermoelasticity Solution
5.1. Case 1:
5.2. Case 2:
5.3. Case 3:
6. Results and Discussions
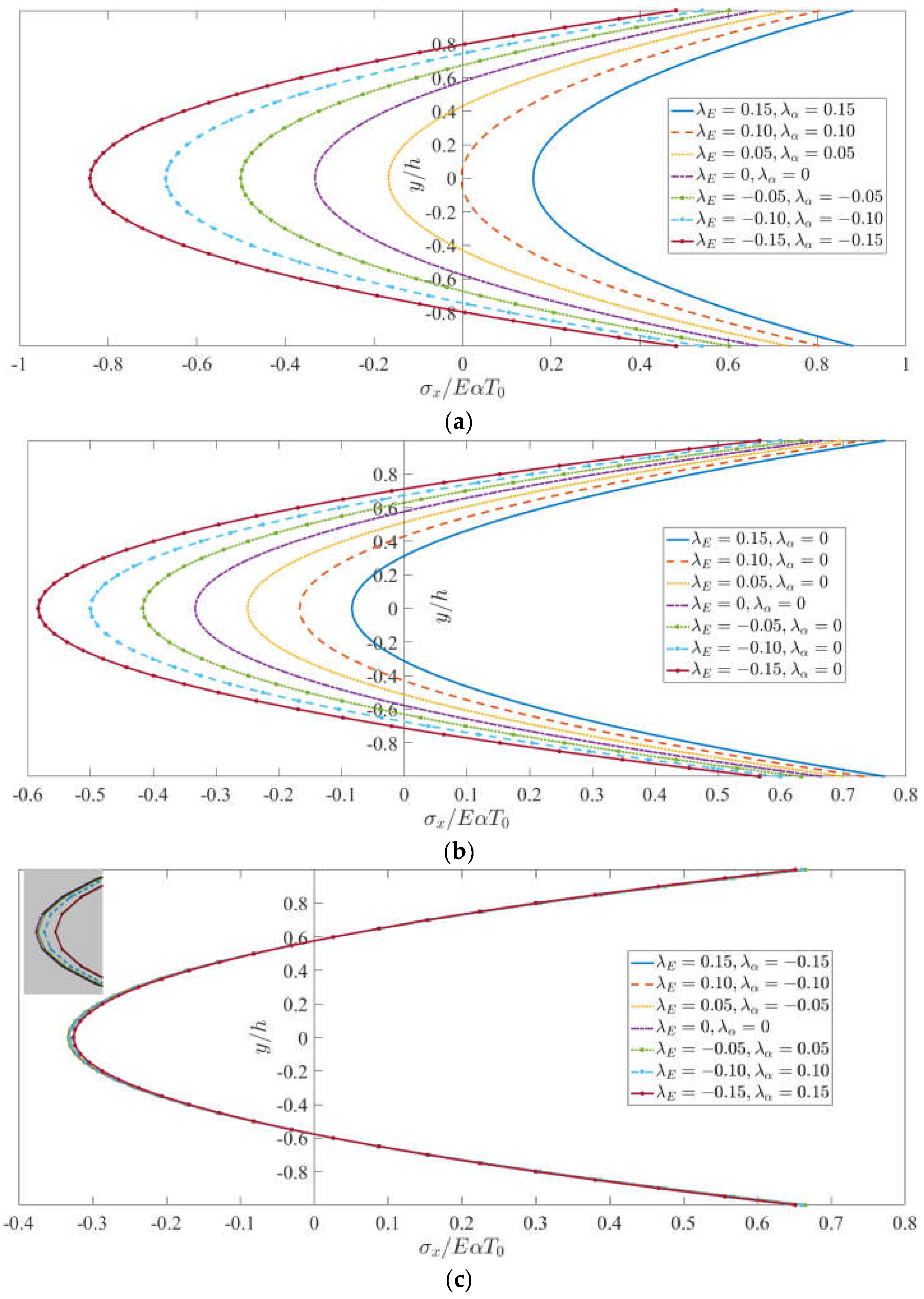
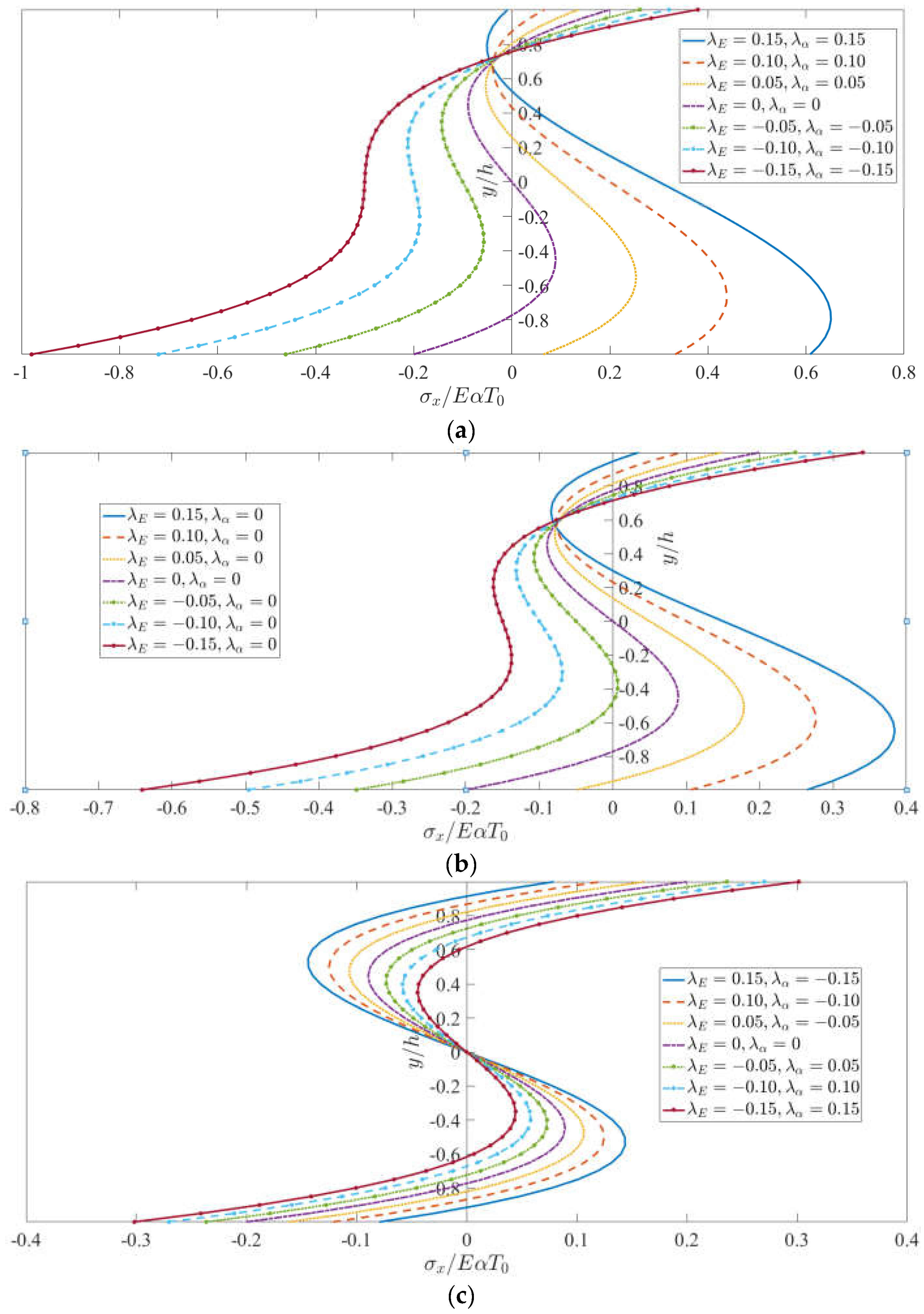
6.1. Bimodular Effect on Thermal Stress
- (i)
- Basic curve shapes:
- (ii)
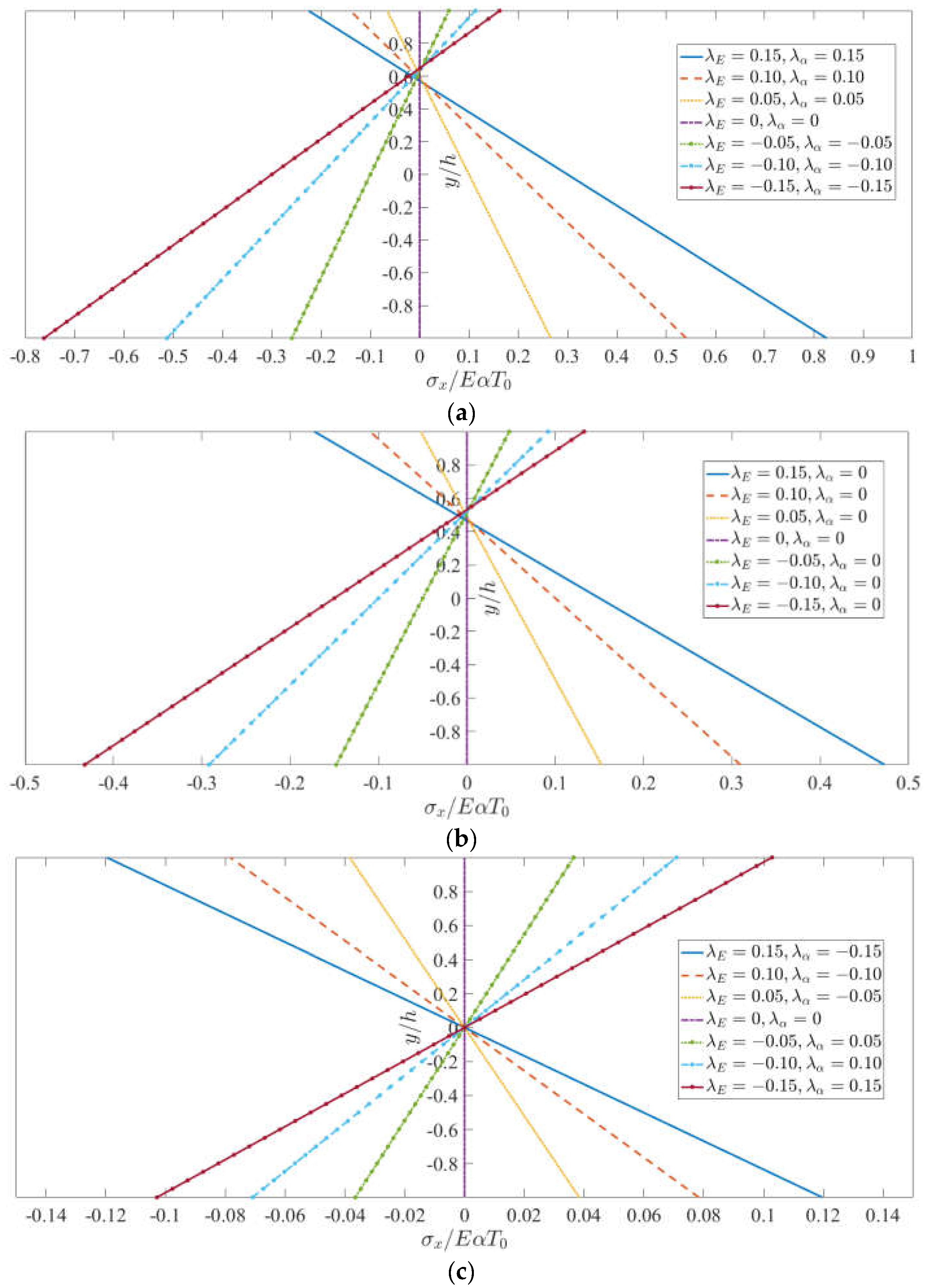
- Neutral axes and stress distributions:
- (iii)
- Amplitudes of stress variation:
6.2. Discussions on the Compatibility
6.3. Discussions on the Equilibrium
6.4. Link of One- and Two-Dimensional Solutions
7. Concluding Remarks
- (i)
- Above all, the linear temperature rise will produce unexpected thermal stress in a bimodular metal bar whereas there exists no corresponding thermal stress in a metal bar without the bimodular effect.
- (ii)
- If the equilibrium relation needs to be satisfied, the variation trend of λE and λα should be opposite, that is, if E+ > E−, we may have α+ < α−; or alternatively if E+ < E−, we may have α+ > α−. This opposite changing trend actually refers to the inherent mechanistic relationship between modulus of elasticity and thermal expansion coefficient.
- (iii)
- After the introduction of the bimodular effect, the amplitude of stress variation from the maximum tensile stress to the maximum compressive stress increase dramatically, in comparison with common problems of the same modulus.
- (iv)
- There exists an inevitable link between one- and two-dimensional solutions. Especially, the first term of one-dimensional solution corresponds to a special solution of the Lamé equation; while the second and third terms of one-dimensional solution correspond to the supplement solution of the Lamé equation.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Timoshenko, S.P.; Goodier, J.N. Theory of Elasticity, 3rd ed.; McGraw Hill: New York, NY, USA, 1970. [Google Scholar]
- Barak, M.M.; Currey, J.D.; Weiner, S.; Shahar, R. Are tensile and compressive Young’s moduli of compact bone different. J. Mech. Behav. Biomed. Mater. 2009, 2, 51–60. [Google Scholar] [CrossRef] [PubMed]
- Destrade, M.; Gilchrist, M.D.; Motherway, J.A.; Murphy, J.G. Bimodular rubber buckles early in bending. Mech. Mater. 2010, 42, 469–476. [Google Scholar] [CrossRef] [Green Version]
- Jones, R.M. Stress-strain relations for materials with different moduli in tension and compression. AIAA J. 1977, 15, 16–23. [Google Scholar] [CrossRef]
- Bert, C.W. Models for fibrous composites with different properties in tension and compression. ASME J. Eng. Mater. Technol. 1977, 99, 344–349. [Google Scholar] [CrossRef]
- Bruno, D.; Lato, S.; Sacco, E. Nonlinear analysis of bimodular composite plates under compression. Comput. Mech. 1994, 14, 28–37. [Google Scholar] [CrossRef]
- Tseng, Y.P.; Lee, C.T. Bending analysis of bimodular laminates using a higher-order finite strip method. Compos. Struct. 1995, 30, 341–350. [Google Scholar] [CrossRef]
- Zinno, R.; Greco, F. Damage evolution in bimodular laminated composite under cyclic loading. Compos. Struct. 2001, 53, 381–402. [Google Scholar] [CrossRef]
- Hsu, Y.S.; Reddy, J.N.; Bert, C.W. Thermoelasticity of circular cylindrical shells laminated of bimodulus composite materials. J. Therm. Stresses 1981, 4, 155–177. [Google Scholar] [CrossRef]
- Ambartsumyan, S.A. Elasticity Theory of Different Moduli; Wu, R.F.; Zhang, Y.Z., Translators; China Railway Publishing House: Beijing, China, 1986. [Google Scholar]
- Yao, W.J.; Ye, Z.M. Analytical solution for bending beam subject to lateral force with different modulus. Appl. Math. Mech. 2004, 25, 1107–1117. [Google Scholar]
- He, X.T.; Chen, S.L.; Sun, J.Y. Applying the equivalent section method to solve beam subjected lateral force and bending-compression column with different moduli. Int. J. Mech. Sci. 2007, 49, 919–924. [Google Scholar] [CrossRef]
- He, X.T.; Sun, J.Y.; Wang, Z.X.; Chen, Q.; Zheng, Z.L. General perturbation solution of large-deflection circular plate with different moduli in tension and compression under various edge conditions. Int. J. Nonlin. Mech. 2013, 55, 110–119. [Google Scholar] [CrossRef]
- He, X.T.; Cao, L.; Wang, Y.Z.; Sun, J.Y.; Zheng, Z.L. A biparametric perturbation method for the Föppl-von Kármán equations of bimodular thin plates. J. Math. Anal. Appl. 2017, 455, 1688–1705. [Google Scholar] [CrossRef]
- Zhang, Y.Z.; Wang, Z.F. Finite element method of elasticity problem with different tension and compression moduli. Comput. Struct. Mech. Appl. 1989, 6, 236–245. [Google Scholar]
- Ye, Z.M.; Chen, T.; Yao, W.J. Progresses in elasticity theory with different moduli in tension and compression and related FEM. Mech. Eng. 2004, 26, 9–14. [Google Scholar]
- Yang, H.T.; Zhu, Y.L. Solving elasticity problems with bi-modulus via a smoothing technique. Chin. J. Comput. Mech. 2006, 23, 19–23. [Google Scholar]
- Sun, J.Y.; Zhu, H.Q.; Qin, S.H.; Yang, D.L.; He, X.T. A review on the research of mechanical problems with different moduli in tension and compression. J. Mech. Sci. Technol. 2010, 24, 1845–1854. [Google Scholar] [CrossRef]
- Du, Z.L.; Zhang, Y.P.; Zhang, W.S.; Guo, X. A new computational framework for materials with different mechanical responses in tension and compression and its applications. Int. J. Solids Struct. 2016, 100–101, 54–73. [Google Scholar] [CrossRef]
- Hetnarski, R.B.; Eslami, M.R. Thermal Stresses-Advanced Theory and Applications, Solid Mechanics and Its Applications 158; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Furukawa, T.; Irschik, H. Body-force analogy for one-dimensional coupled dynamic problems of thermoelasticity. J. Therm. Stresses 2005, 28, 455–464. [Google Scholar] [CrossRef]
- Irschik, H.; Gusenbauer, M. Body force analogy for transient thermal stresses. J. Therm. Stresses 2007, 30, 965–975. [Google Scholar] [CrossRef]
- Irschik, H.; Krommer, M.; Zehetner, C.h. A generalized body force analogy for the dynamic theory of thermoelasticity. J. Therm. Stresses 2012, 35, 235–247. [Google Scholar] [CrossRef]
- Mirnezhad, M.; Modarresi, M.; Ansari, R.; Roknabadi, M.R. Effect of temperature on Young’s modulus of grapheme. J. Therm. Stresses 2012, 35, 913–920. [Google Scholar] [CrossRef]
- Wen, S.-R.; He, X.-T.; Chang, H.; Sun, J.-Y. A two-dimensional thermoelasticity solution for bimodular material beams under the combination action of thermal and mechanical loads. Mathematics 2021, 9, 1556. [Google Scholar] [CrossRef]
- Balokhonov, R.; Romanova, V.; Zinovieva, O.; Zemlianov, A. Microstructure-based analysis of residual stress concentration and plastic strain localization followed by fracture in metal-matrix composites. Eng. Fract. Mech. 2022, 259, 108138. [Google Scholar] [CrossRef]
- Balokhonov, R.; Romanova, V.; Kulkov, A. Microstructure-based analysis of deformation and fracture in metal-matrix composite materials. Eng. Fail. Anal. 2020, 110, 104412. [Google Scholar] [CrossRef]
- Balokhonov, R.R.; Romanova, V.A.; Schmauder, S.; Emelianova, E.S. A numerical study of plastic strain localization and fracture across multiple spatial scales in materials with metal-matrix composite coatings. Theor. Appl. Fract. Mech. 2019, 101, 342–355. [Google Scholar] [CrossRef]
- Romanova, V.A.; Balokhonov, R.R.; Schmauder, S. The influence of the reinforcing particle shape and interface strength on the fracture behavior of a metal matrix composite. Acta Mater. 2009, 57, 97–107. [Google Scholar] [CrossRef]
- Balokhonov, R.R.; Romanova, V.A.; Schmauder, S. Computational analysis of deformation and fracture in a composite material on the mesoscale level. Comput. Mater. Sci. 2006, 37, 110–118. [Google Scholar] [CrossRef]
- Li, L.Y. The rationalism theory and its finite element analysis method of shell structures. Appl. Math. Mech. 1990, 11, 395–402. [Google Scholar]
- Kirshon, Y.; Ben Shalom, S.; Emuna, M.; Greenberg, Y.; Lee, J.; Makov, G.; Yahel, E. Thermophysical measurements in liquid alloys and phase diagram studies. Materials 2019, 12, 3999. [Google Scholar] [CrossRef] [Green Version]
- Koniorczyk, P.; Zmywaczyk, J.; Dębski, A.; Zieliński, M.; Preiskorn, M.; Sienkiewicz, J. Investigation of thermophysical properties of three barrel steels. Metals 2020, 10, 573. [Google Scholar] [CrossRef]
- Jeon, S.; Cho, Y.C.; Kim, Y.-I.; Lee, Y.-H.; Lee, S.; Lee, G.W. Influence of Ag addition on thermal stability and thermophysical properties of Ti-Zr-Ni quasicrystals. Metals 2020, 10, 760. [Google Scholar] [CrossRef]
- MR, S.K.; Schmidova, E.; Konopík, P.; Melzer, D.; Bozkurt, F.; Londe, N. Fracture toughness analysis of automotive-grade dual-phase steel using Essential Work of Fracture (EWF) method. Metals 2020, 10, 1019. [Google Scholar] [CrossRef]
- Marin, M.; Othman, M.I.A.; Abbas, I.A. An extension of the domain of influence theorem for generalized thermoelasticity of anisotropic material with voids. J. Comput. Theor. Nanosci. 2015, 12, 1594–1598. [Google Scholar] [CrossRef]
- Othman, M.I.A.; Said, S.; Marin, M. A novel model of plane waves of two-temperature fiber-reinforced thermoelastic medium under the effect of gravity with three-phase-lag model. Int. J. Numer. Methods Heat Fluid Flow 2019, 29, 4788–4806. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metals or Alloys | E+ (GPa) 1 | E− (GPa) | λE |
|---|---|---|---|
| Regular steel 40 | 205.790 | 211.788 | −0.0144 |
| Regular steel У8 | 204.791 | 213.772 | −0.0215 |
| Iron 1X18H9T | 200.792 | 211.788 | −0.0267 |
| Pig iron СЧ12-28 | 91.846 | 121.873 | −0.1405 |
| Bronze Bp.C-30 | 26.470 | 29.469 | −0.0536 |
| Silafont AП2 | 66.934 | 73.422 | −0.0462 |
| λE | λα | Case 1 | Case 2 | Case 3 |
|---|---|---|---|---|
| 0.15 | −0.15 | 0.2392 | 0.9775 | 0.2886 |
| 0.10 | −0.10 | 0.1568 | 0.9900 | 0.2502 |
| 0.05 | −0.05 | 0.0768 | 0.9975 | 0.3230 |
| 0 | 0 | 0 | 1 | 0.4000 |
| −0.05 | 0.05 | 0.0730 | 0.9975 | 0.4728 |
| −0.10 | 0.10 | 0.1418 | 0.9900 | 0.5408 |
| −0.15 | 0.15 | 0.2056 | 0.9775 | 0.6034 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Y.; Wen, S.-R.; Sun, J.-Y.; He, X.-T. Theoretical Study on Thermal Stresses of Metal Bars with Different Moduli in Tension and Compression. Metals 2022, 12, 347. https://doi.org/10.3390/met12020347
Guo Y, Wen S-R, Sun J-Y, He X-T. Theoretical Study on Thermal Stresses of Metal Bars with Different Moduli in Tension and Compression. Metals. 2022; 12(2):347. https://doi.org/10.3390/met12020347
Chicago/Turabian StyleGuo, Ying, Si-Rui Wen, Jun-Yi Sun, and Xiao-Ting He. 2022. "Theoretical Study on Thermal Stresses of Metal Bars with Different Moduli in Tension and Compression" Metals 12, no. 2: 347. https://doi.org/10.3390/met12020347