
Determining Strawberries’ Varying Maturity Levels by Utilizing Image Segmentation Methods of Improved DeepLabV3+



Abstract
:1. Introduction
2. Materials and Methods
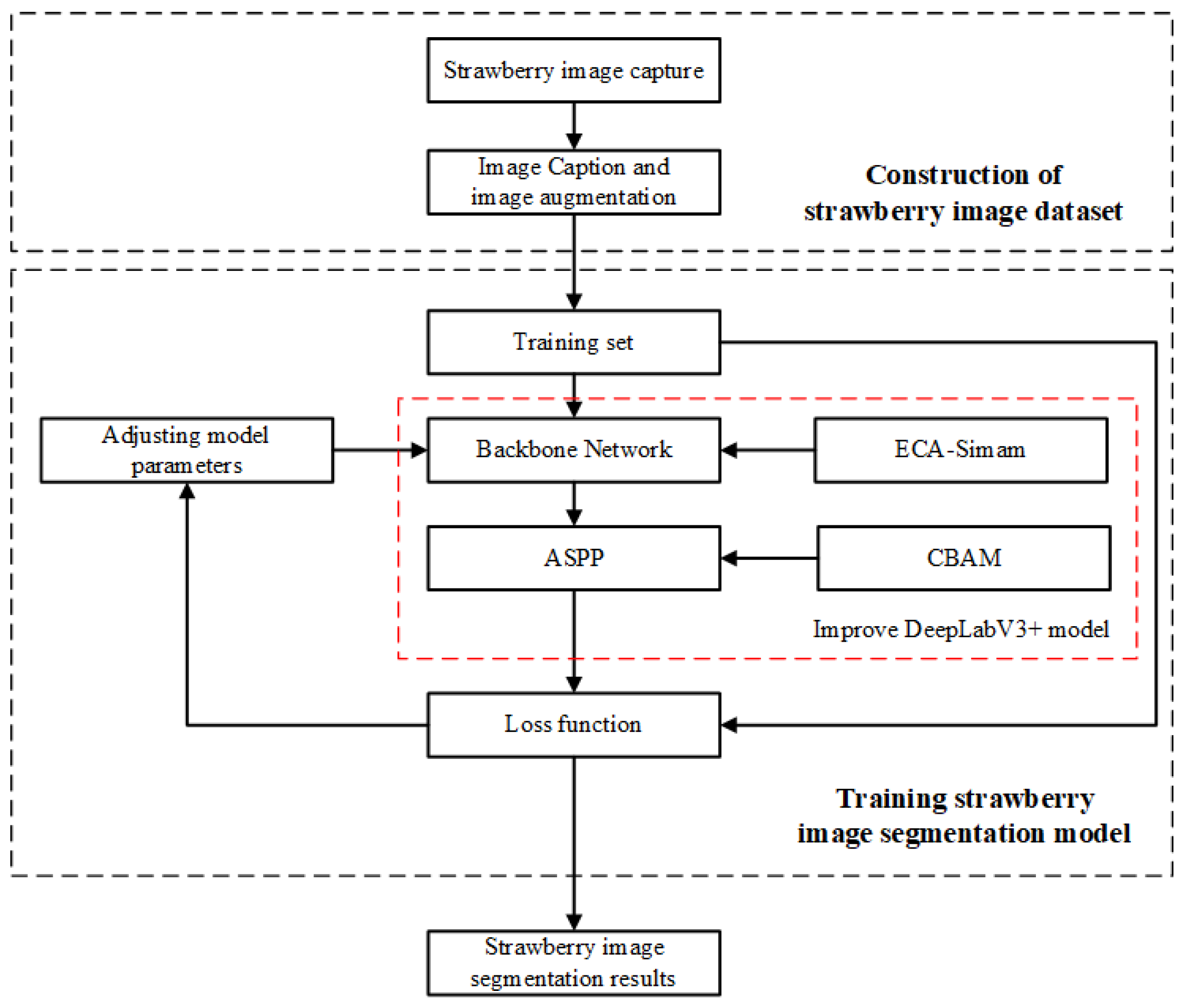
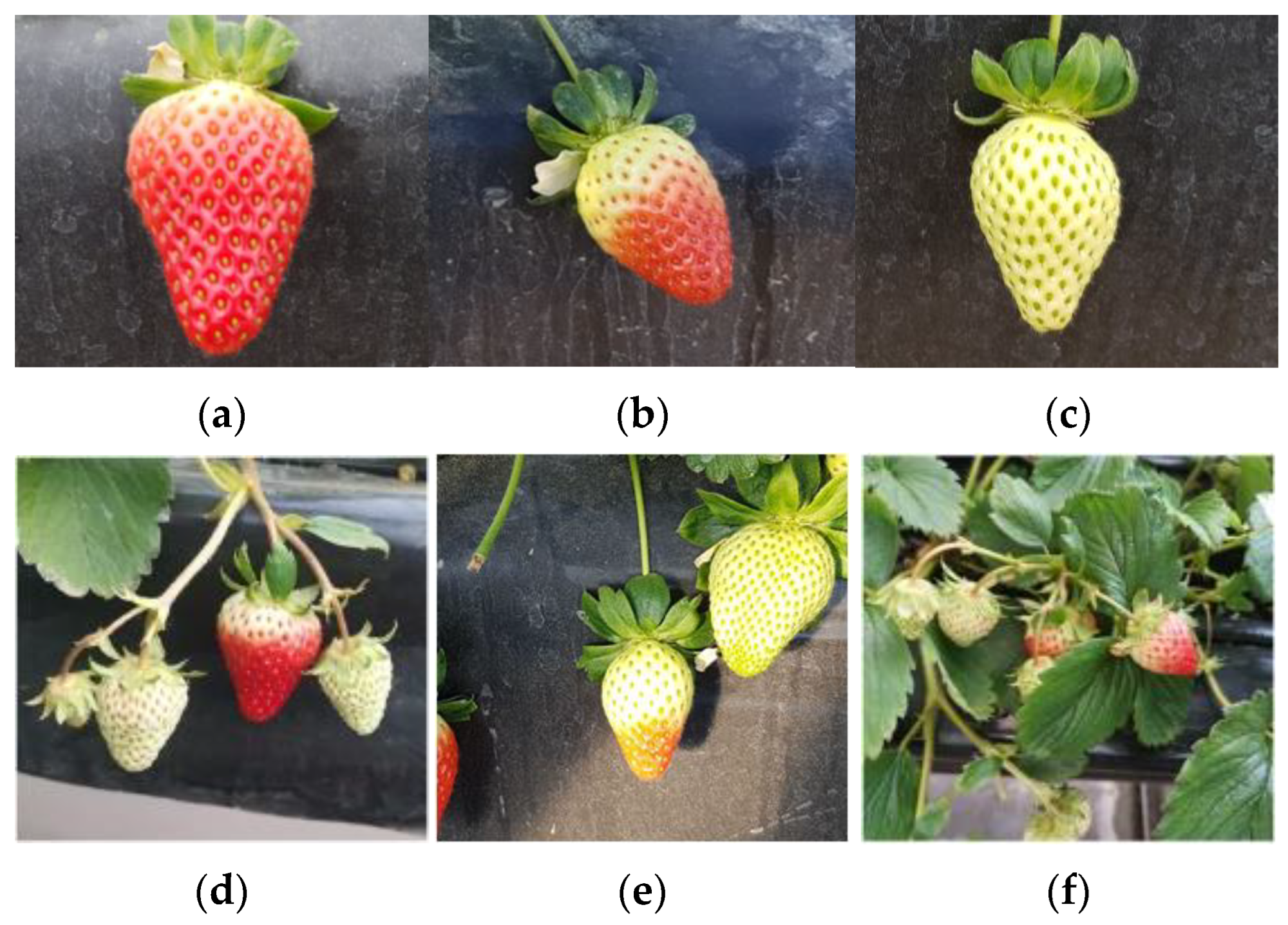
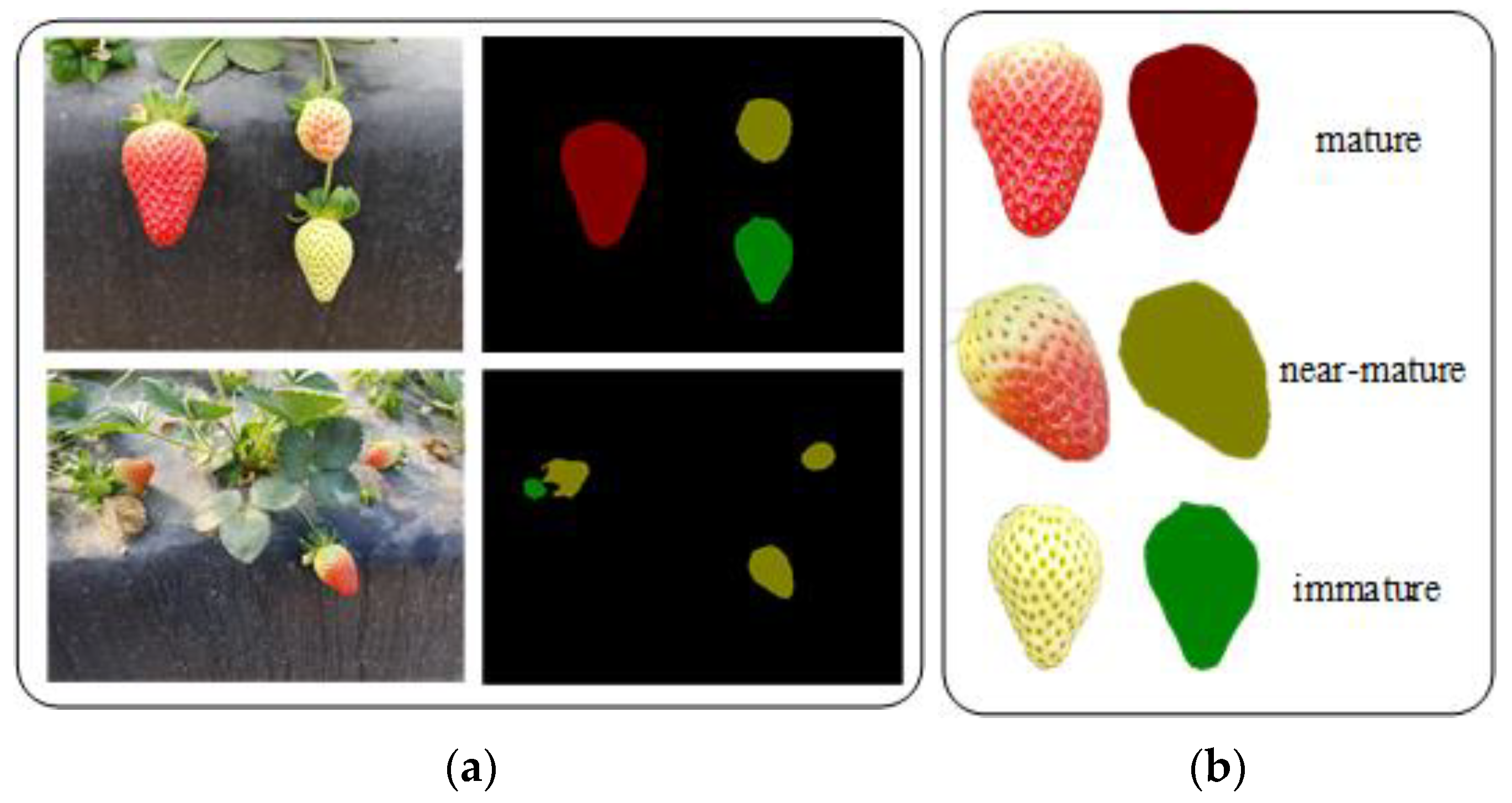
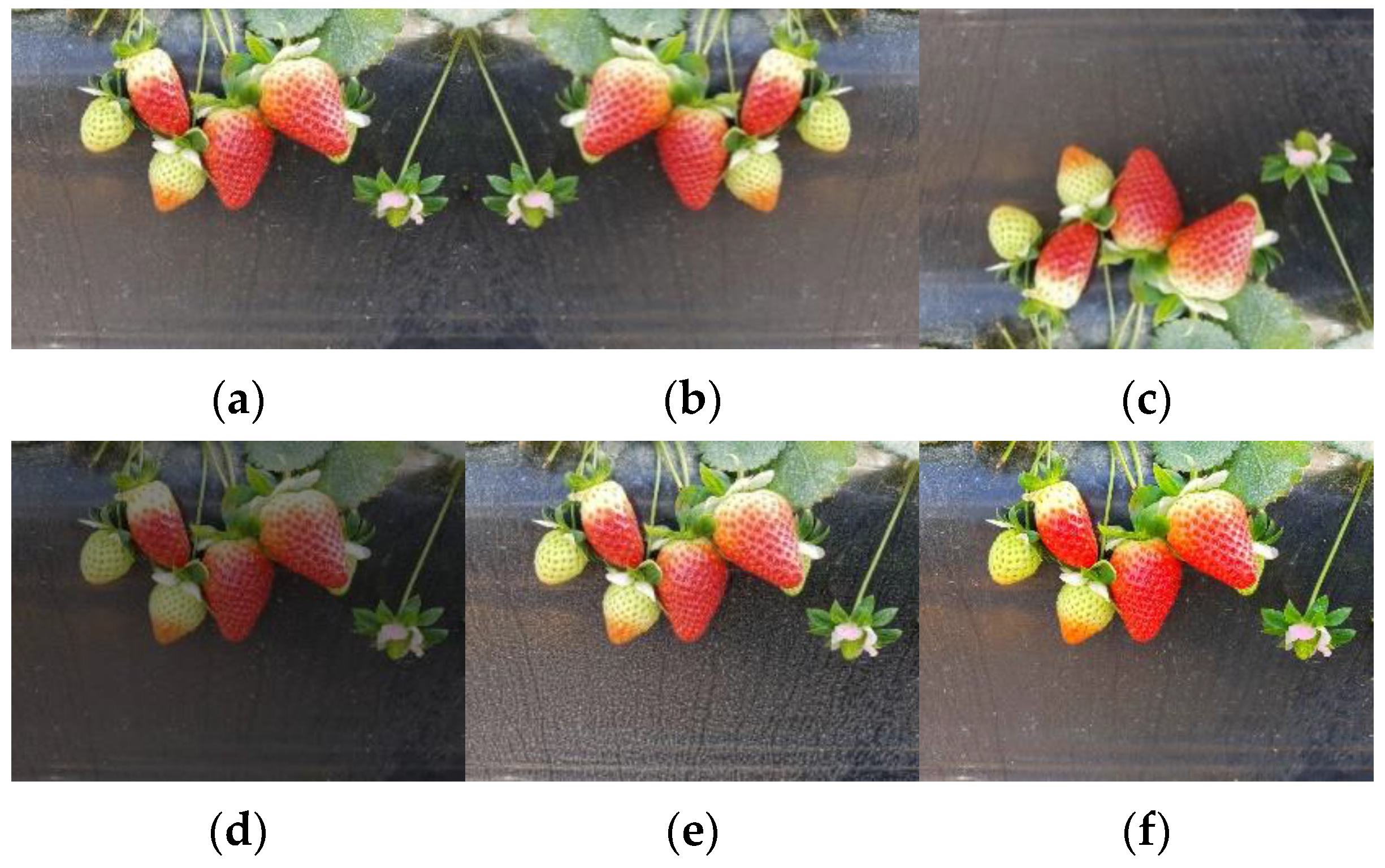
2.1. Construction of Strawberry Image Dataset
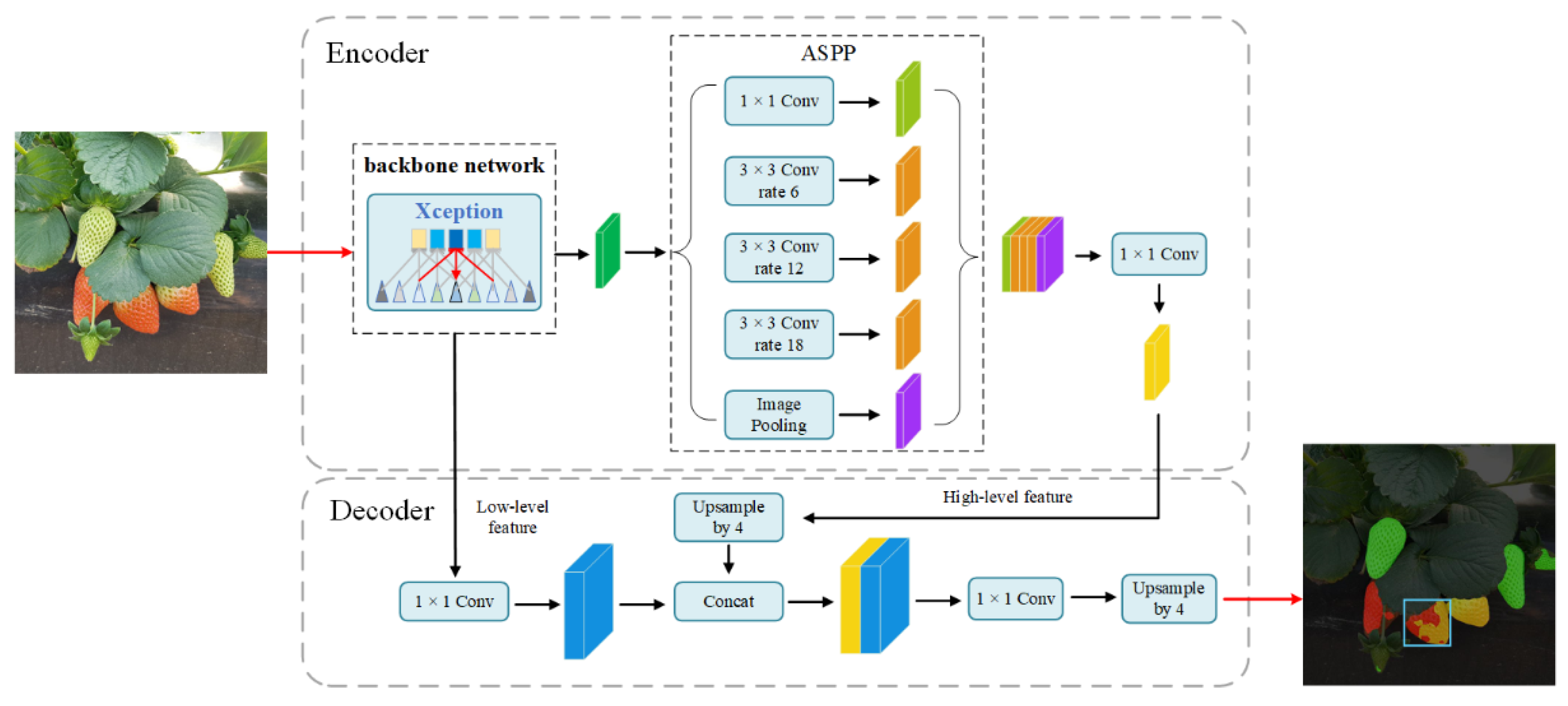
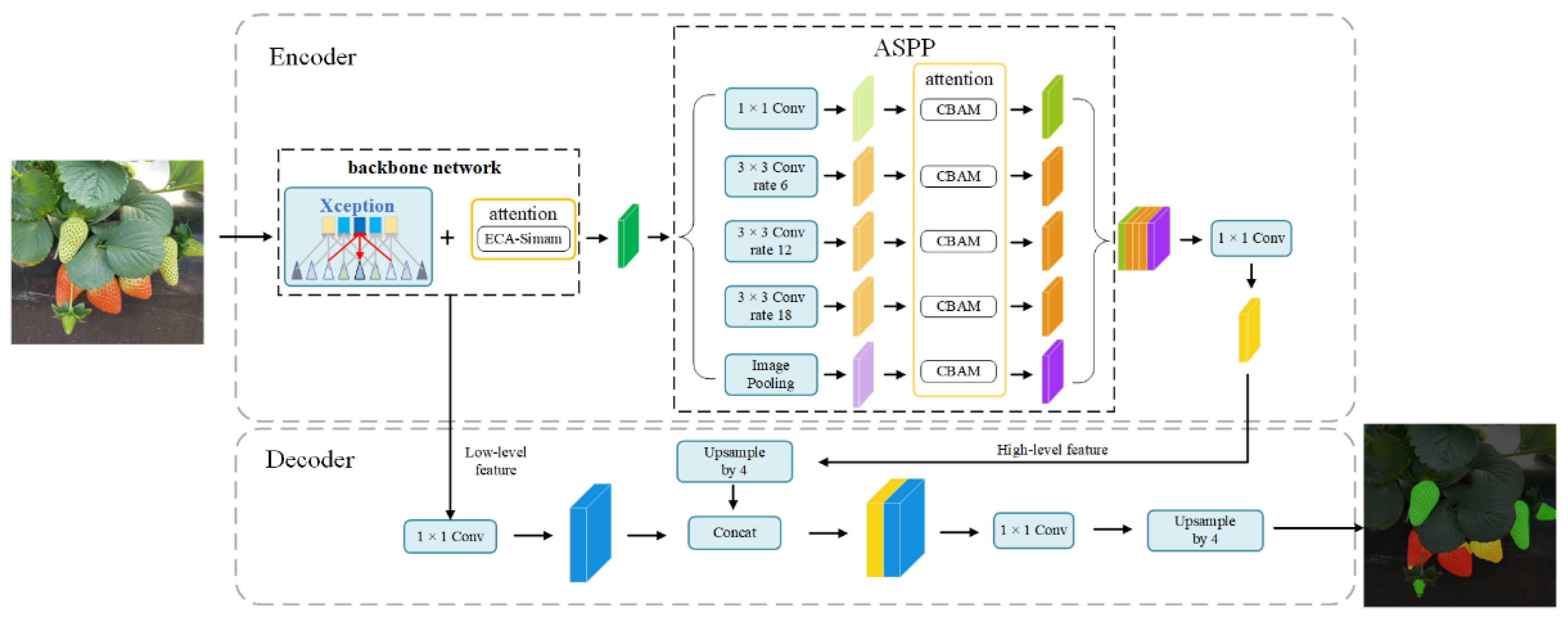
2.2. Improved DeepLabV3+ Strawberry Image Segmentation Model
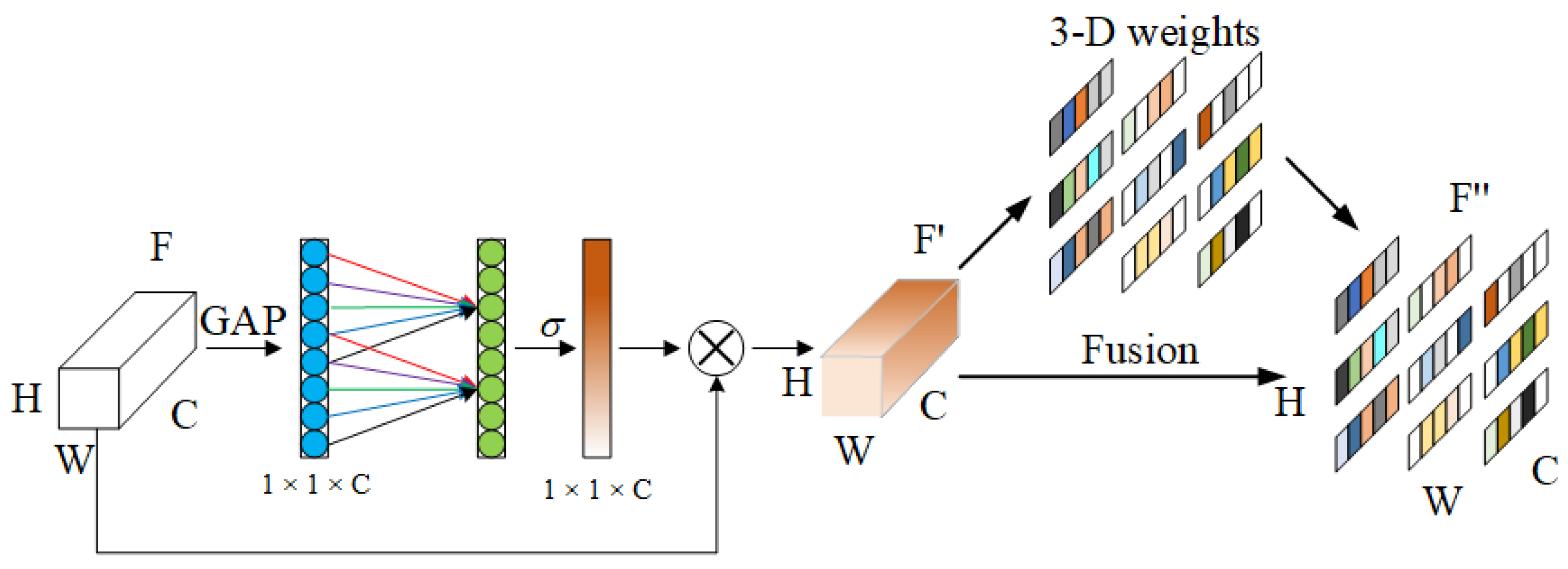
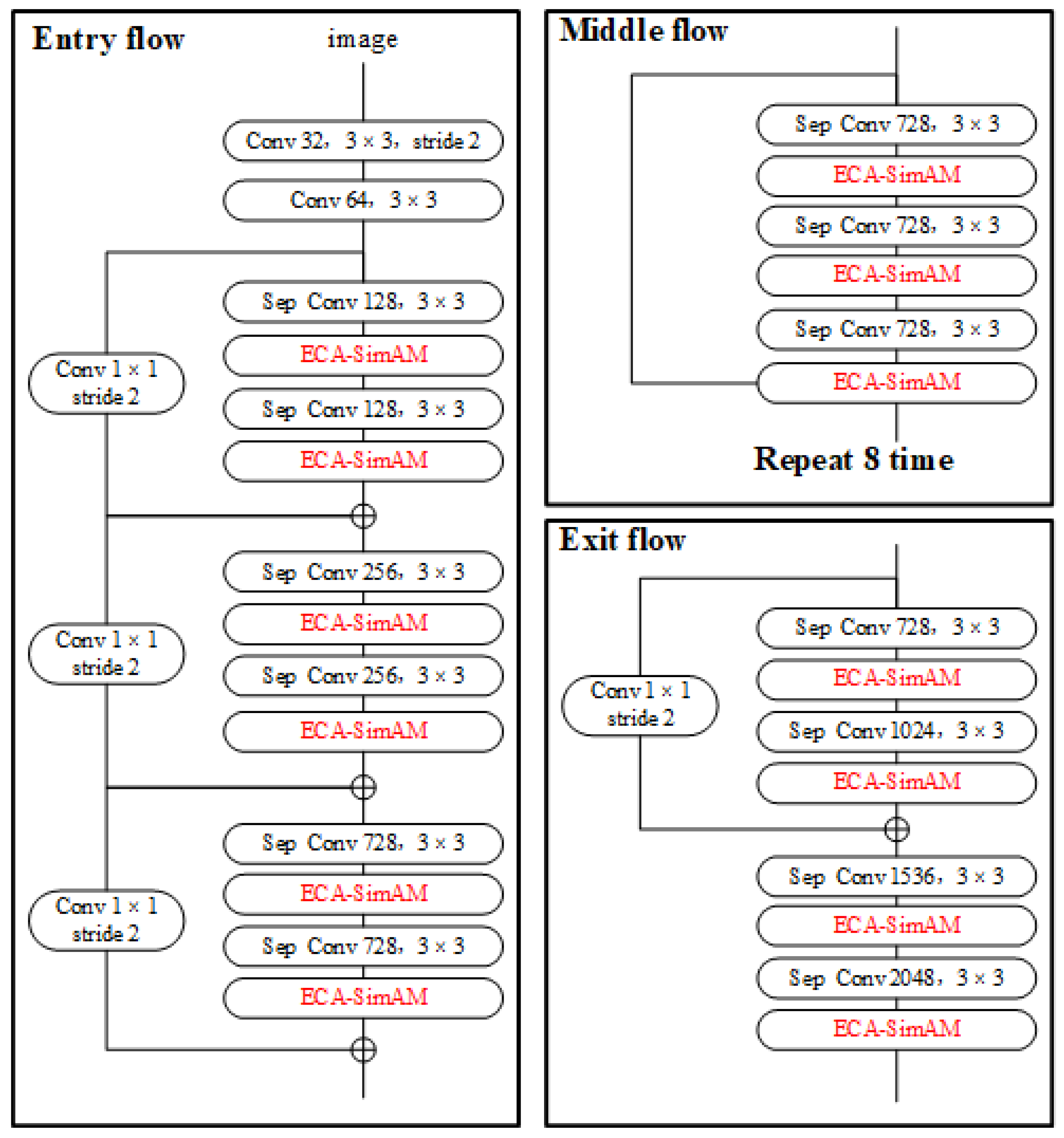
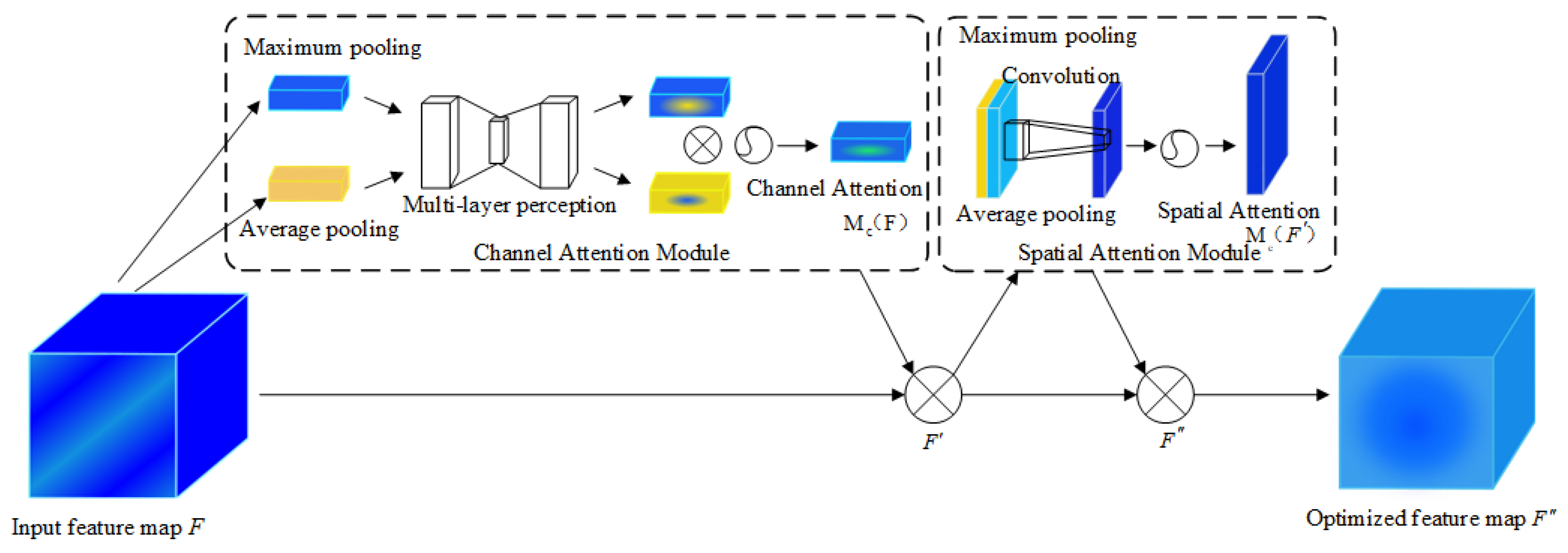
2.2.1. Dual-Attention Mechanism to Optimize the Backbone Network
2.2.2. Convolutional Attention Mechanism to Enhance ASPP
2.3. Model Evaluation Metrics
3. Results
3.1. Confirmation of Test Environment and Parameter Settings
3.2. Analysis of Strawberry Image Segmentation Models
3.2.1. Ablation Experiments
3.2.2. Performance Analysis of Different Models
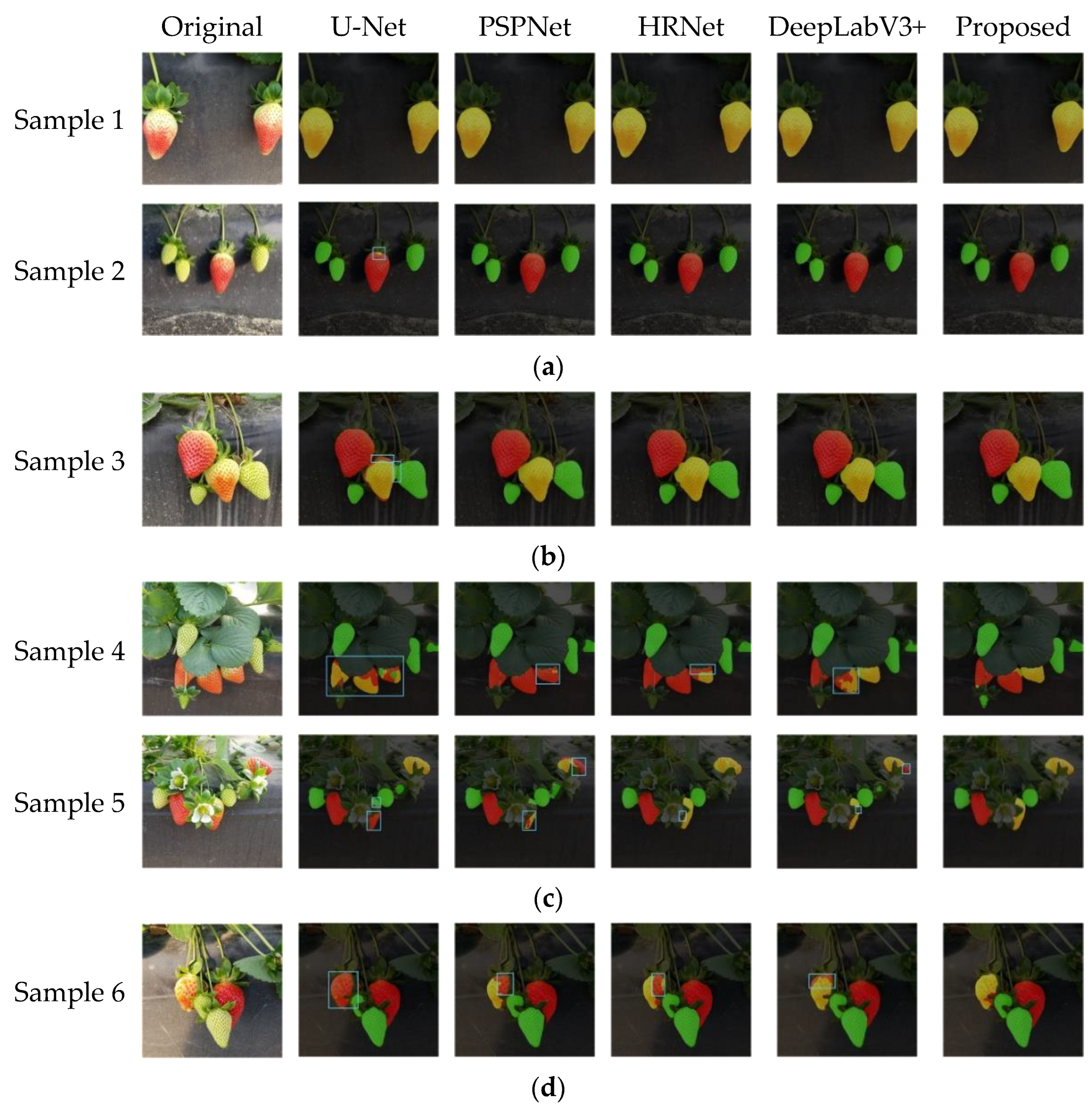
3.2.3. Different Model Segmentation Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shu, R.; Jiao, J.; Zang, C.J.; Liu, S.J.; Sun, Y.N.; Yue, L.X. The current situation of China’s strawberry industry and development suggestions. China Fruit Veg. 2019, 39, 57–59. [Google Scholar] [CrossRef]
- Liu, J.Z.; Wu, S. Research progress of mechanized technology and equipment for the whole production of strawberry. Trans-Actions Chin. Soc. Agric. Mach. 2021, 52, 1–16. [Google Scholar] [CrossRef]
- Wang, H.; Peng, J.; Xie, C.; Bao, Y.; He, Y. Fruit Quality Evaluation Using Spectroscopy Technology: A Review. Sensors 2015, 15, 11889–11927. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Raj, R.; Cosgun, A.; Kulić, D. Strawberry Water Content Estimation and Ripeness Classification Using Hyperspectral Sensing. Agronomy 2022, 12, 425. [Google Scholar] [CrossRef]
- Su, Z.; Zhang, C.; Yan, T.; Zhu, J.; Zeng, Y.; Lu, X.; Gao, P.; Feng, L.; He, L.; Fan, L. Application of Hyperspectral Imaging for Maturity and Soluble Solids Content Determination of Strawberry With Deep Learning Approaches. Front. Plant Sci. 2021, 12, 1897. [Google Scholar] [CrossRef] [PubMed]
- Guo, Y.; Liu, Y.; Oerlemans, A.; Lao, S.; Wu, S.; Lew, M.S. Deep learning for visual understanding: A review. Neurocomputing 2016, 187, 27–48. [Google Scholar] [CrossRef]
- Kamilaris, A.; Prenafeta-Boldú, F.X. Deep learning in agriculture: A survey. Comput. Electron. Agric. 2018, 147, 70–90. [Google Scholar] [CrossRef] [Green Version]
- Zheng, T.X.; Jiang, M.Z.; Feng, M.C. A review of vision-based target recognition and localization methods for picking robots. Chin. J. Sci. Instrum. 2021, 42, 28–51. [Google Scholar] [CrossRef]
- Chen, S.W.; Shivakumar, S.S.; Dcunha, S.; Das, J.; Okon, E.; Qu, C.; Taylor, C.J.; Kumar, V. Counting Apples and Oranges With Deep Learning: A Data-Driven Approach. IEEE Robot. Autom. Lett. 2017, 2, 781–788. [Google Scholar] [CrossRef]
- Liu, X.; Chen, S.W.; Aditya, S.; Sivakumar, N.; Dcunha, S.; Qu, C.; Taylor, C.J.; Das, J.; Kumar, V. Robust Fruit Counting: Combining Deep Learning, Tracking, and Structure from Motion. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1045–1052. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Song, Y.; Su, J.; Fang, Y.; Shen, L.; Mi, Z.; Su, B. Segmentation of field grape bunches via an improved pyramid scene parsing network. Int. J. Agric. Biol. Eng. 2021, 14, 185–194. [Google Scholar] [CrossRef]
- Chen, J.; Han, M.N.; Lian, Y.; Zhang, S. Image segmentation of rice seeds containing heterogeneous rice based on U-Net model. Trans. Chin. Soc. Agric. Eng. 2020, 36, 174–180. [Google Scholar] [CrossRef]
- Majeed, Y.; Zhang, J.; Zhang, X.; Fu, L.; Karkee, M.; Zhang, Q.; Whiting, M.D. Apple Tree Trunk and Branch Segmentation for Automatic Trellis Training Using Convolutional Neural Network Based Semantic Segmentation. IFAC-PapersOnline 2018, 51, 75–80. [Google Scholar] [CrossRef]
- Li, J.; Tang, Y.; Zou, X.; Lin, G.; Wang, H. Detection of Fruit-Bearing Branches and Localization of Litchi Clusters for Vision-Based Harvesting Robots. IEEE Access 2020, 8, 117746–117758. [Google Scholar] [CrossRef]
- Peng, H.; Xue, C.; Shao, Y.; Chen, K.; Xiong, J.; Xie, Z.; Zhang, L. Semantic Segmentation of Litchi Branches Using DeepLabV3+ Model. IEEE Access 2020, 8, 164546–164555. [Google Scholar] [CrossRef]
- Wang, C.; Du, P.; Wu, H.; Li, J.; Zhao, C.; Zhu, H. A cucumber leaf disease severity classification method based on the fusion of DeepLabV3+ and U-Net. Comput. Electron. Agric. 2021, 189, 106373. [Google Scholar] [CrossRef]
- Pérez-Borrero, I.; Marín-Santos, D.; Gegúndez-Arias, M.E.; Cortés-Ancos, E. A fast and accurate deep learning method for strawberry instance segmentation. Comput. Electron. Agric. 2020, 178, 105736. [Google Scholar] [CrossRef]
- Perez-Borrero, I.; Marin-Santos, D.; Vasallo-Vazquez, M.J.; Gegundez-Arias, M.E. A new deep-learning strawberry instance segmentation methodology based on a fully convolutional neural network. Neural Comput. Appl. 2021, 33, 15059–15071. [Google Scholar] [CrossRef]
- Afzaal, U.; Bhattarai, B.; Pandeya, Y.R.; Lee, J. An Instance Segmentation Model for Strawberry Diseases Based on Mask R-CNN. Sensors 2021, 21, 6565. [Google Scholar] [CrossRef] [PubMed]
- Long, J.H.; Zhao, C.J.; Lin, S.; Guo, W.Z.; Wen, C.W.; Zhang, Y. Improved Mask R-CNN for tomato fruit segmentation with different ripeness in greenhouse environment. Trans. Chin. Soc. Agric. Eng. 2021, 37, 100–108. [Google Scholar] [CrossRef]
- Ilyas, T.; Khan, A.; Umraiz, M.; Jeong, Y.; Kim, H. Multi-Scale Context Aggregation for Strawberry Fruit Recognition and Disease Phenotyping. IEEE Access 2021, 9, 124491–124504. [Google Scholar] [CrossRef]
- Yu, Y.; Zhang, K.; Yang, L.; Zhang, D. Fruit detection for strawberry harvesting robot in non-structural environment based on Mask-RCNN. Comput. Electron. Agric. 2019, 163, 104846. [Google Scholar] [CrossRef]
- Jia, Z.W.; Yao, S.; Zhang, R.Y.; Wang, R.B.; Zhang, J. Fruit recognition of greenhouse strawberries based on improved U-Net network. J. Shanxi Agric. Univ. (Nat. Sci. Ed.) 2022, 42, 120–128. [Google Scholar] [CrossRef]
- Ge, Y.; Xiong, Y.; From, P.J. Instance Segmentation and Localization of Strawberries in Farm Conditions for Automatic Fruit Harvesting. IFAC-PapersOnline 2019, 52, 294–299. [Google Scholar] [CrossRef]
- Russell, B.C.; Torralba, A.; Murphy, K.P.; Freeman, W.T. LabelMe: A Database and Web-Based Tool for Image Annotation. Int. J. Comput. Vis. 2008, 77, 157–173. [Google Scholar] [CrossRef]
- Zhu, F.; Zheng, Z. Image and convolutional neural network based growth potential assessment of Phalaenopsis seedlings. Trans. Chin. Soc. Agric. Eng. 2020, 36, 185–194. [Google Scholar] [CrossRef]
- Chen, L.C.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-decoder with atrous separable convolution for semantic image segmenta-tion. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 801–818. [Google Scholar]
- Chen, L.C.; Papandreou, G.; Schroff, F.; Adam, H. Rethinking atrous convolution for semantic image segmentation. arXiv 2017, arXiv:1706.05587. [Google Scholar]
- Chollet, F. Xception: Deep learning with depthwise separable convolutions. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 1800–1807. [Google Scholar] [CrossRef] [Green Version]
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the inception architecture for computer vision. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 2818–2826. [Google Scholar]
- Yang, L.; Zhang, R.Y.; Li, L.; Xie, X. Simam: A simple, parameter-free attention module for convolutional neural networks. In Proceedings of the International Conference on Machine Learning, PMLR, Virtual, 18–24 July 2021; pp. 11863–11874. [Google Scholar]
- Wang, Q.; Wu, B.; Zhu, P.; Li, P.; Zuo, W.; Hu, Q. ECA-Net: Efficient Channel Attention for Deep Convolutional Neural Networks. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 14–19 June 2020; pp. 11531–11539. [Google Scholar] [CrossRef]
- Woo, S.; Park, J.; Lee, J.Y.; Kweon, I.S. CBAM: Convolutional Block Attention Module. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 3–9. [Google Scholar]
- Luo, H.; Zhang, Y. A review of image semantic segmentation based on deep networks. Acta Electron. Sin. 2019, 47, 2211–2220. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional networks for biomedical image segmentation. In Medical Image Computing and Computer-Assisted Intervention; Springer: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar] [CrossRef] [Green Version]
- Zhao, H.; Shi, J.; Qi, X.; Wang, X.; Jia, J. Pyramid scene parsing network. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2881–2890. Available online: https://jiaya.me/papers/PSPNet_cvpr17.pdf (accessed on 1 June 2022).
- Sun, K.; Xiao, B.; Liu, D.; Wang, J. Deep High-Resolution Representation Learning for Human Pose Estimation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 5686–5696. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Environment | Configuration | Parameters |
|---|---|---|
| Hardware environment | CPU | 4-core Intel(R) Xeon(R) Silver 4110 @ 2.10 GHz |
| GPU | RTX 2080 Ti | |
| Memory | 16 GB | |
| Software environment | System | Ubuntu 16.04 |
| deep learning framework | Pytorch 1.10.0 | |
| programming environment | python 3.8 | |
| GPU parallel computing architecture | Cuba 10.1 | |
| GPU acceleration library | Cudnn 7.6.5. |
| DeeplabV3+ | SimAM Optimize Backbone Network | ECA Optimize Backbone Network | CBAM Enhanced ASPP | Network Model Parameters | MIoU | MPA | FPS |
|---|---|---|---|---|---|---|---|
| √ | 209.70M | 74.04% | 85.45% | 8.52 | |||
| √ | √ | 209.71M | 75.12% | 86.40% | 8.06 | ||
| √ | √ | 209.74M | 76.33% | 86.33% | 8.18 | ||
| √ | √ | 209.77M | 75.92% | 86.59% | 8.37 | ||
| √ | √ | √ | 209.75M | 80.78% | 88.55% | 7.71 | |
| √ | √ | √ | 209.77M | 77.52% | 87.44% | 7.83 | |
| √ | √ | √ | 209.80M | 78.63% | 87.74% | 8.01 | |
| √ | √ | √ | √ | 209.81M | 83.05% | 90.90% | 7.67 |
| Models | Intersection over Union | emIoU | Pixel Accuracy | emPA | ||||
|---|---|---|---|---|---|---|---|---|
| Immature | Near-Mature | Mature | Immature | Near-Mature | Mature | |||
| U-Net | 74.14% | 70.87% | 74.65% | 73.22% | 83.71% | 84.92% | 78.83% | 82.48% |
| PSPNet | 72.66% | 72.84% | 75.02% | 73.50% | 82.60% | 89.18% | 79.59% | 83.79% |
| HRNet | 77.99% | 71.32% | 77.21% | 75.51% | 84.22% | 83.92% | 87.97% | 85.37% |
| DeepLabV3+ | 76.95% | 69.91% | 75.26% | 74.04% | 86.54% | 88.21% | 81.59% | 85.45% |
| Proposed | 80.59% | 82.23% | 86.34% | 83.05% | 90.40% | 90.52% | 91.79% | 90.90% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cai, C.; Tan, J.; Zhang, P.; Ye, Y.; Zhang, J. Determining Strawberries’ Varying Maturity Levels by Utilizing Image Segmentation Methods of Improved DeepLabV3+. Agronomy 2022, 12, 1875. https://doi.org/10.3390/agronomy12081875
Cai C, Tan J, Zhang P, Ye Y, Zhang J. Determining Strawberries’ Varying Maturity Levels by Utilizing Image Segmentation Methods of Improved DeepLabV3+. Agronomy. 2022; 12(8):1875. https://doi.org/10.3390/agronomy12081875
Chicago/Turabian StyleCai, Changqing, Jianwen Tan, Peisen Zhang, Yuxin Ye, and Jian Zhang. 2022. "Determining Strawberries’ Varying Maturity Levels by Utilizing Image Segmentation Methods of Improved DeepLabV3+" Agronomy 12, no. 8: 1875. https://doi.org/10.3390/agronomy12081875