

A Faster R-CNN-Based Model for the Identification of Weed Seedling

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
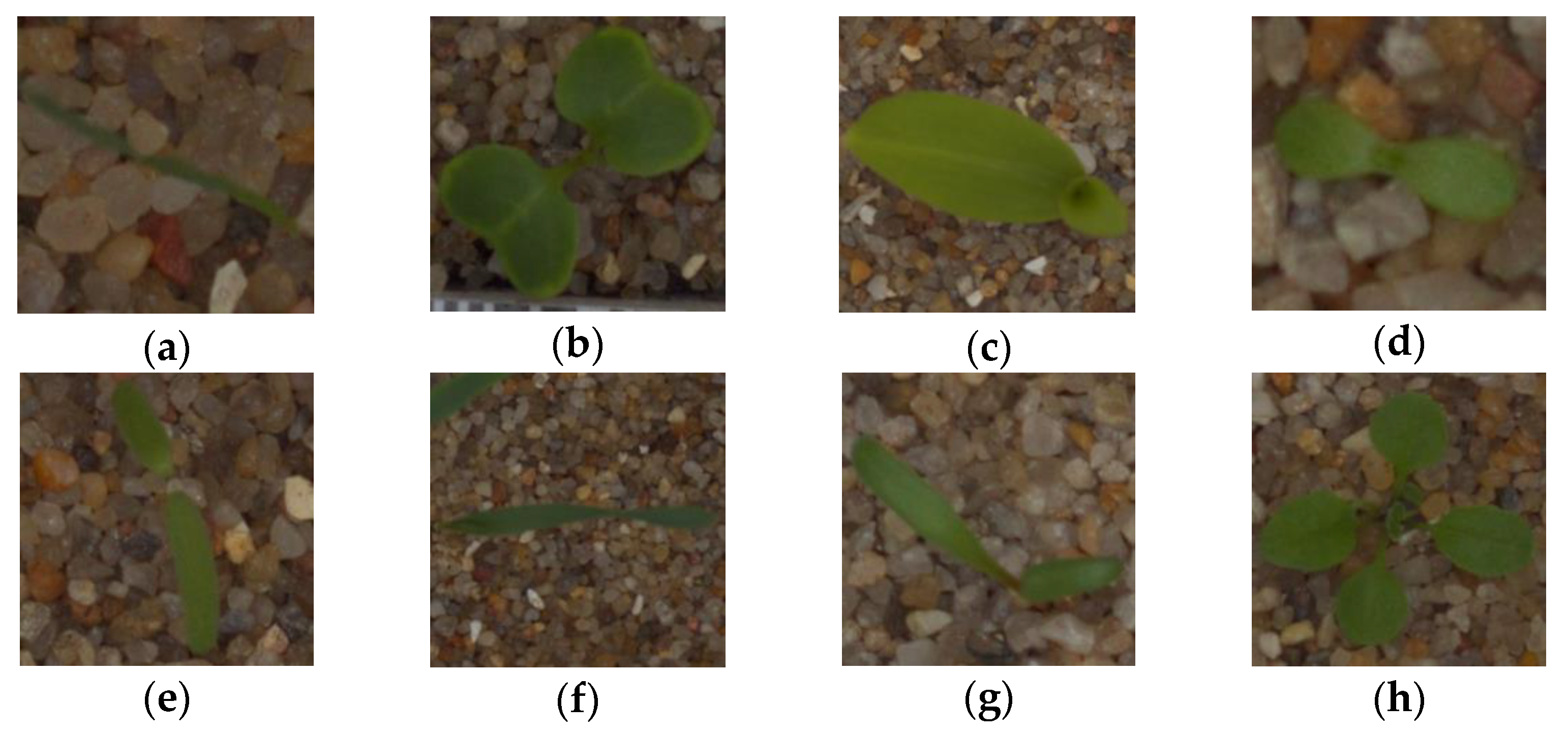
2.1. Image Data Acquisition
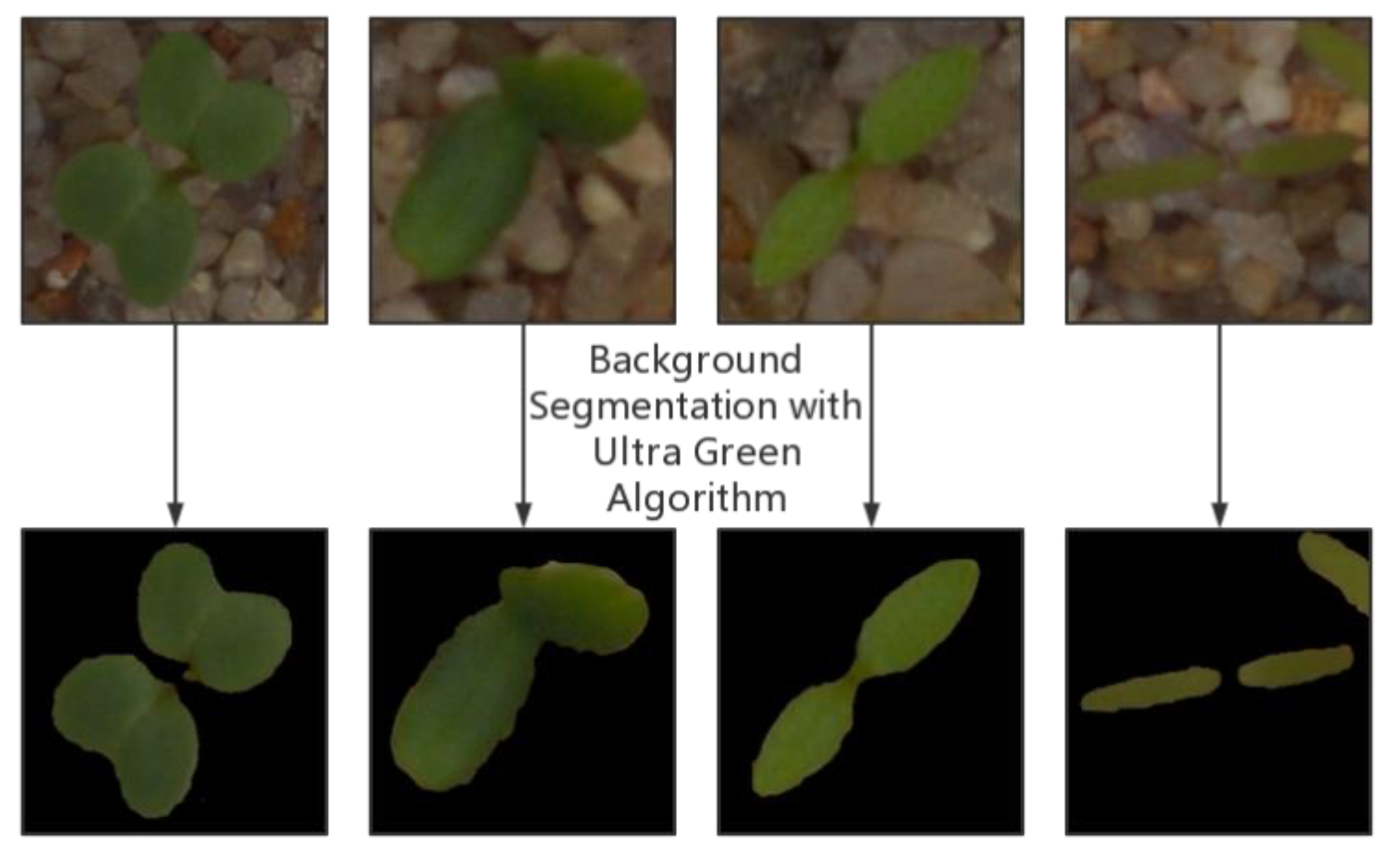
2.2. Image Pre-Processing
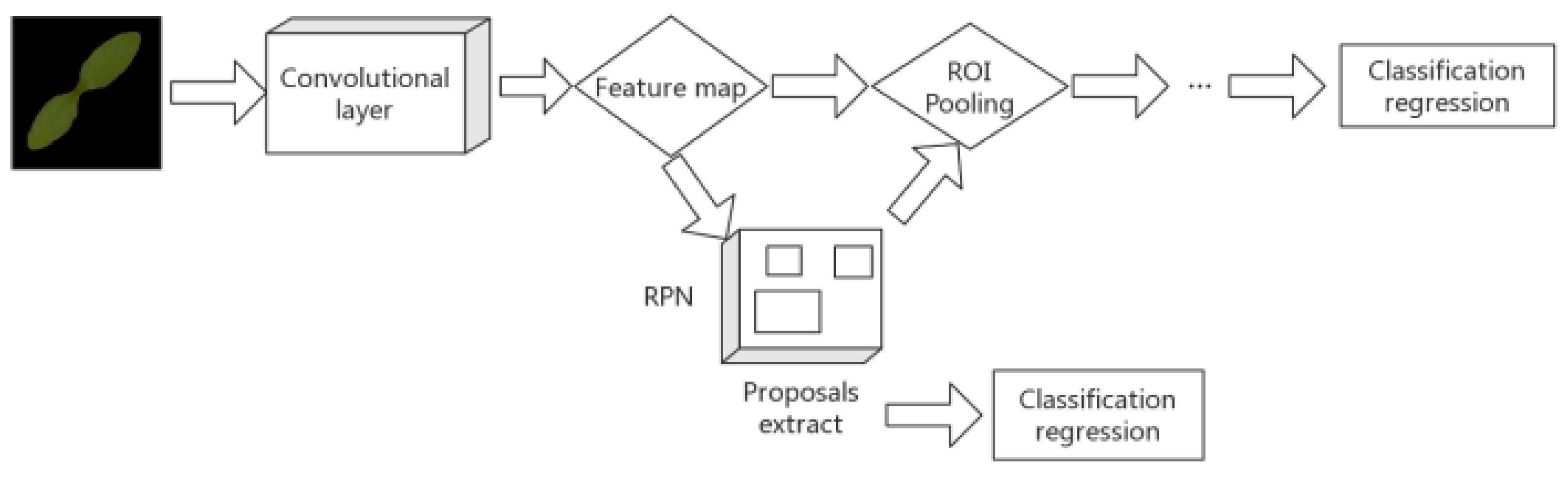
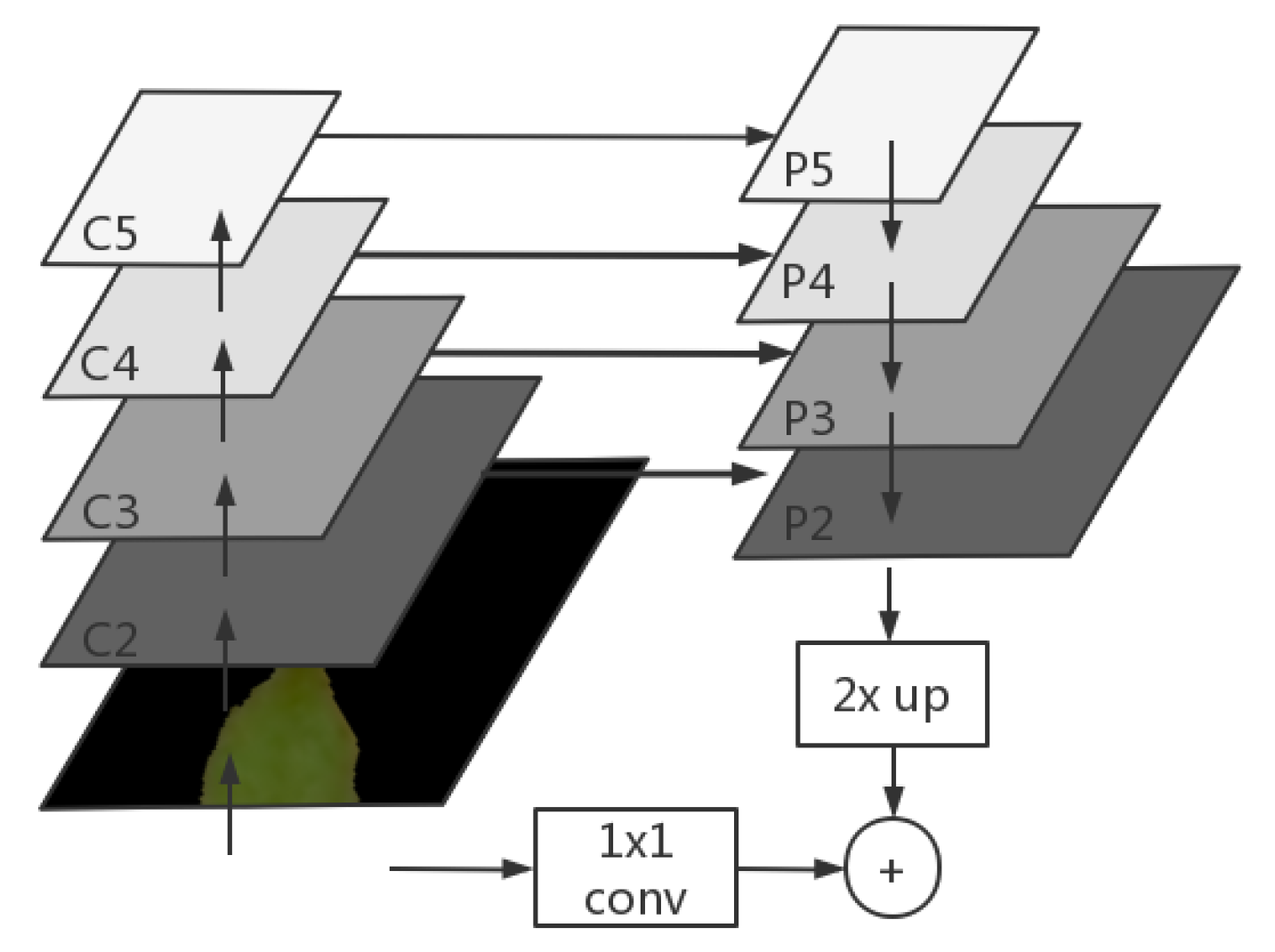
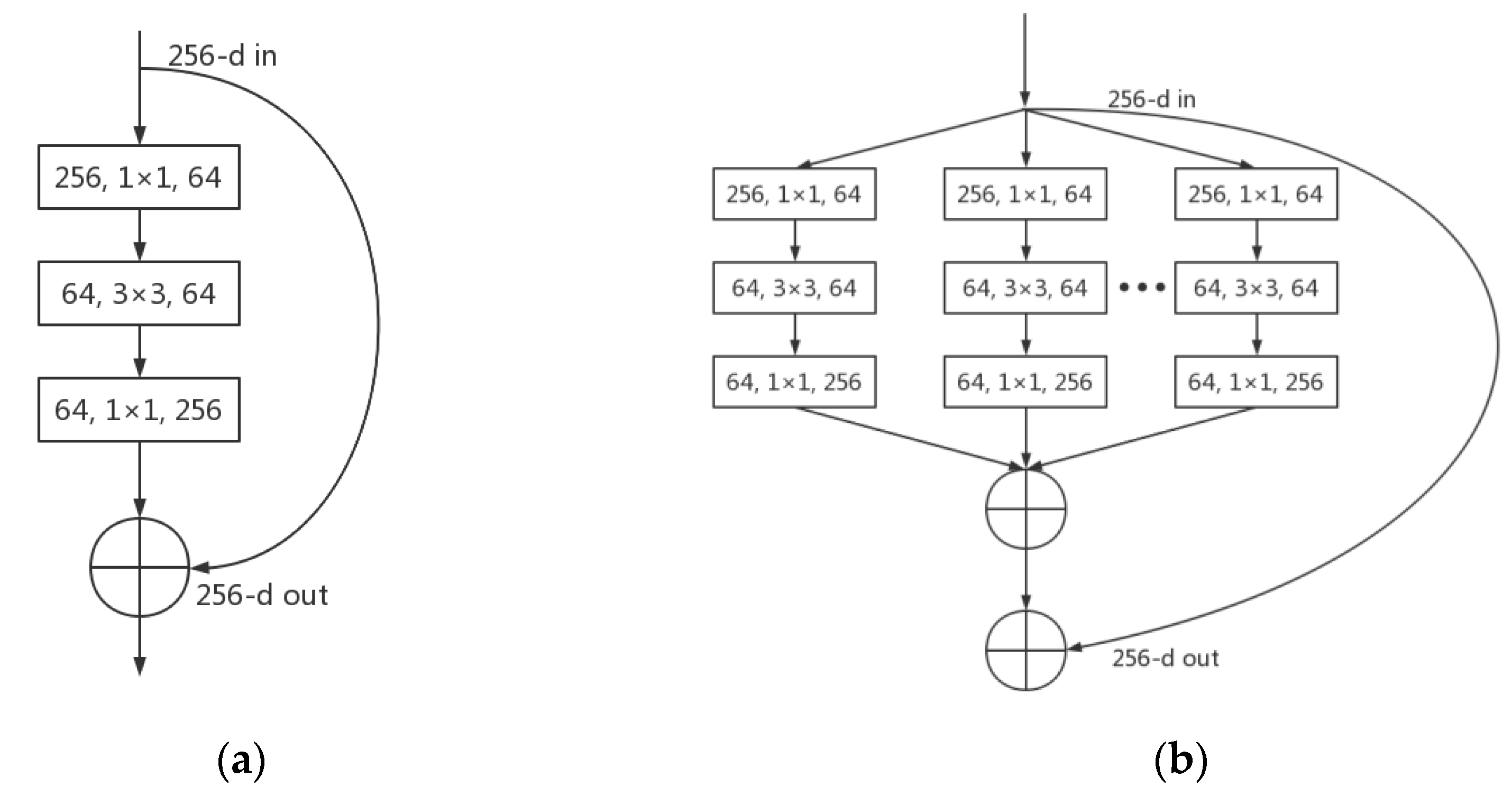
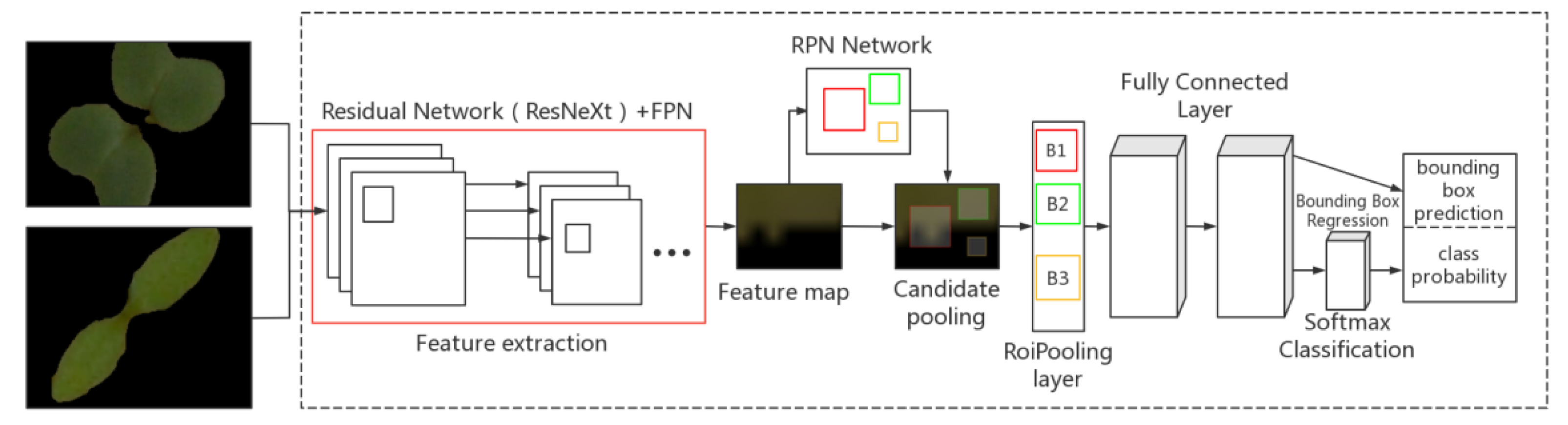
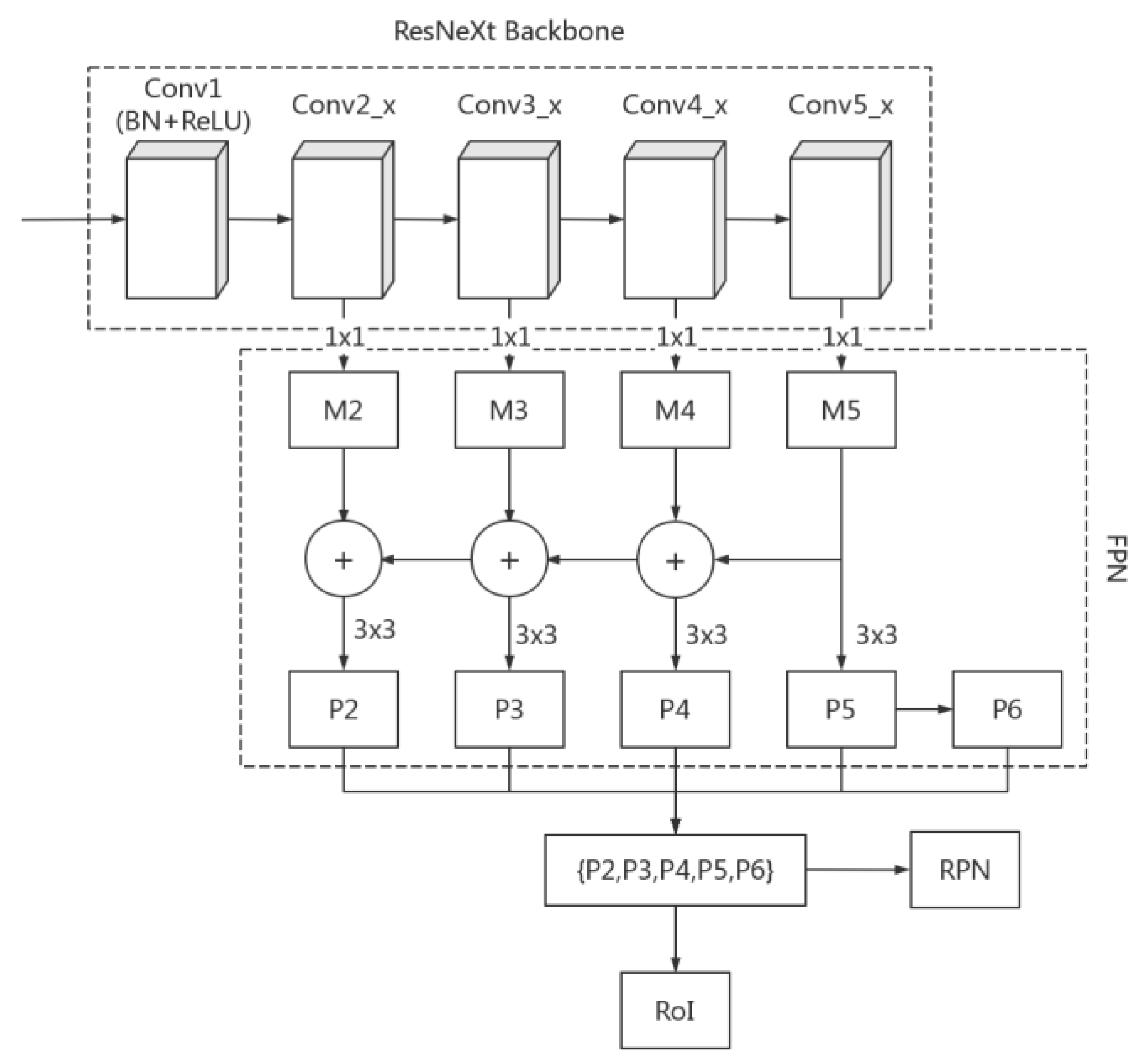
3. Model Refinement
4. Experimental Results and Analysis
4.1. Test Platform
4.2. Parameter Design
4.3. Evaluating Indicator
5. Results and Analysis
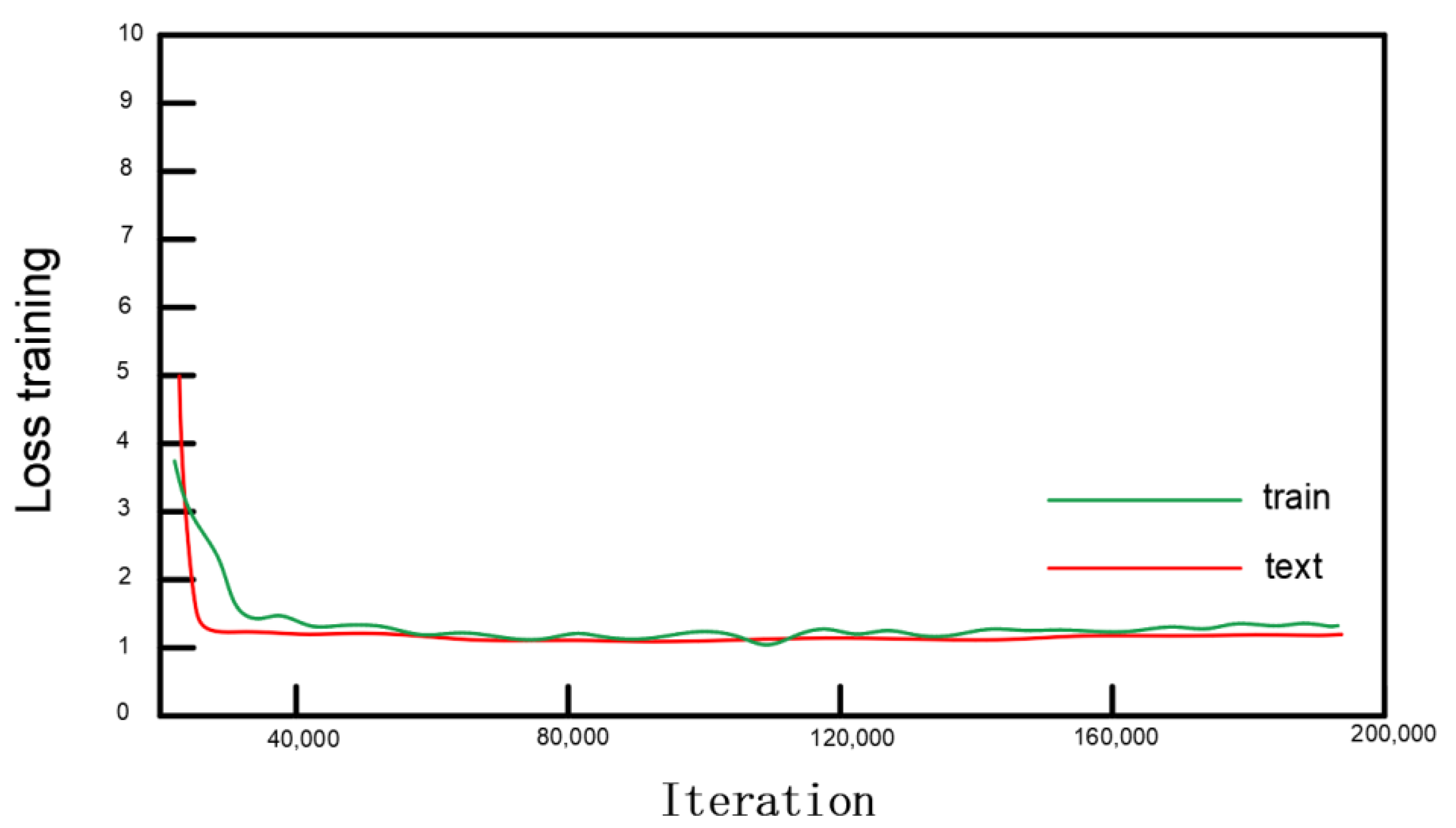
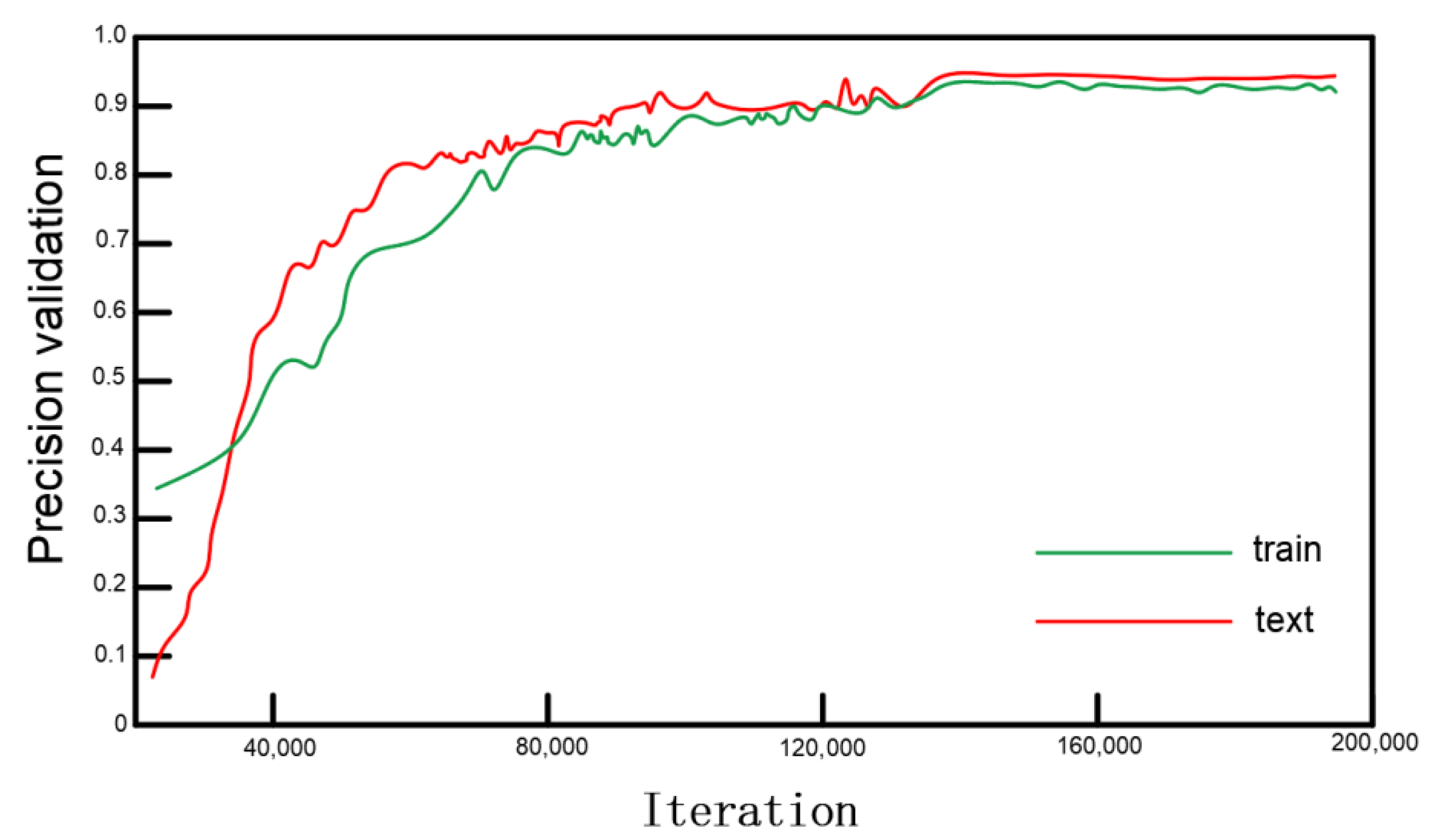
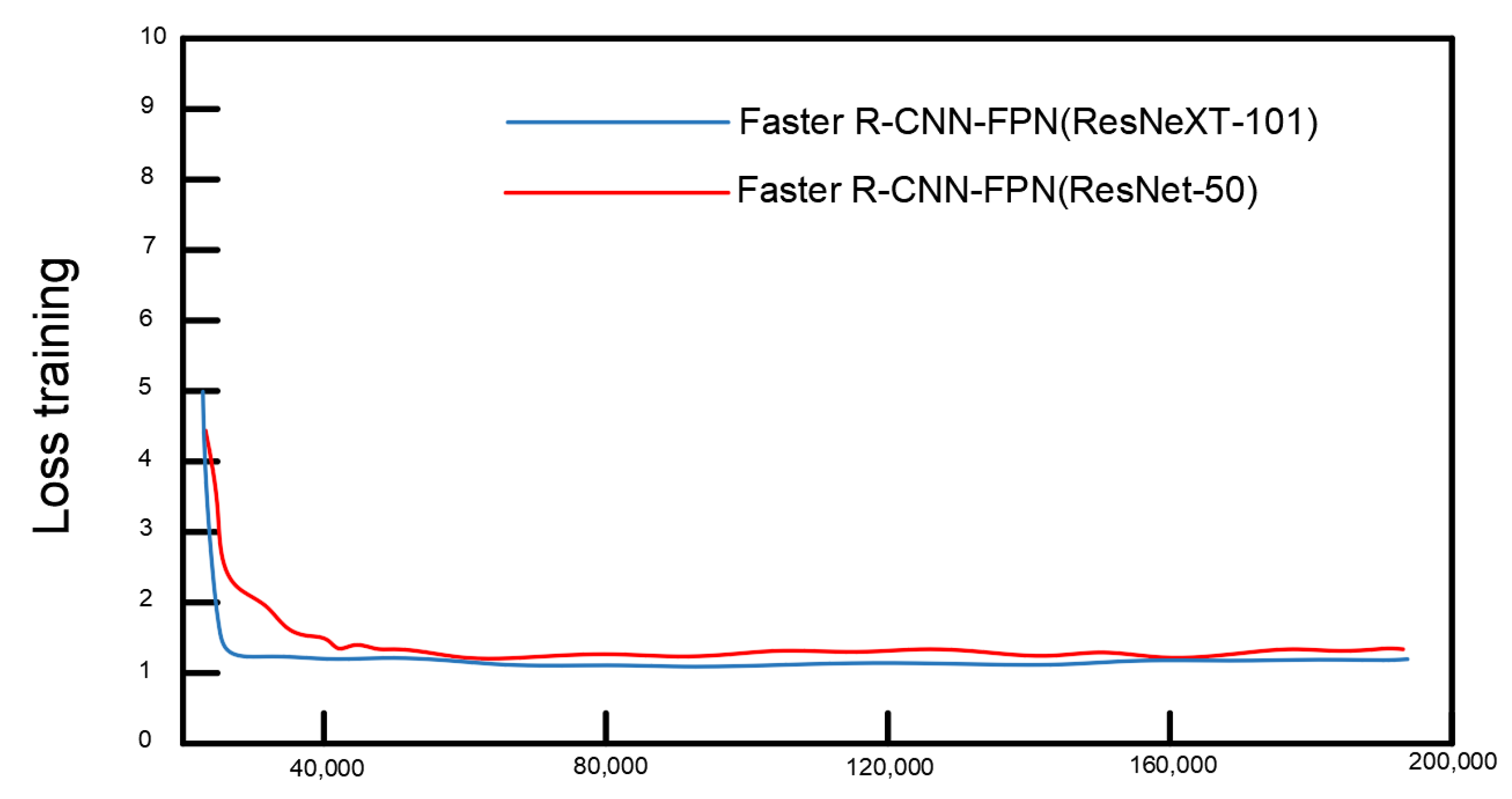
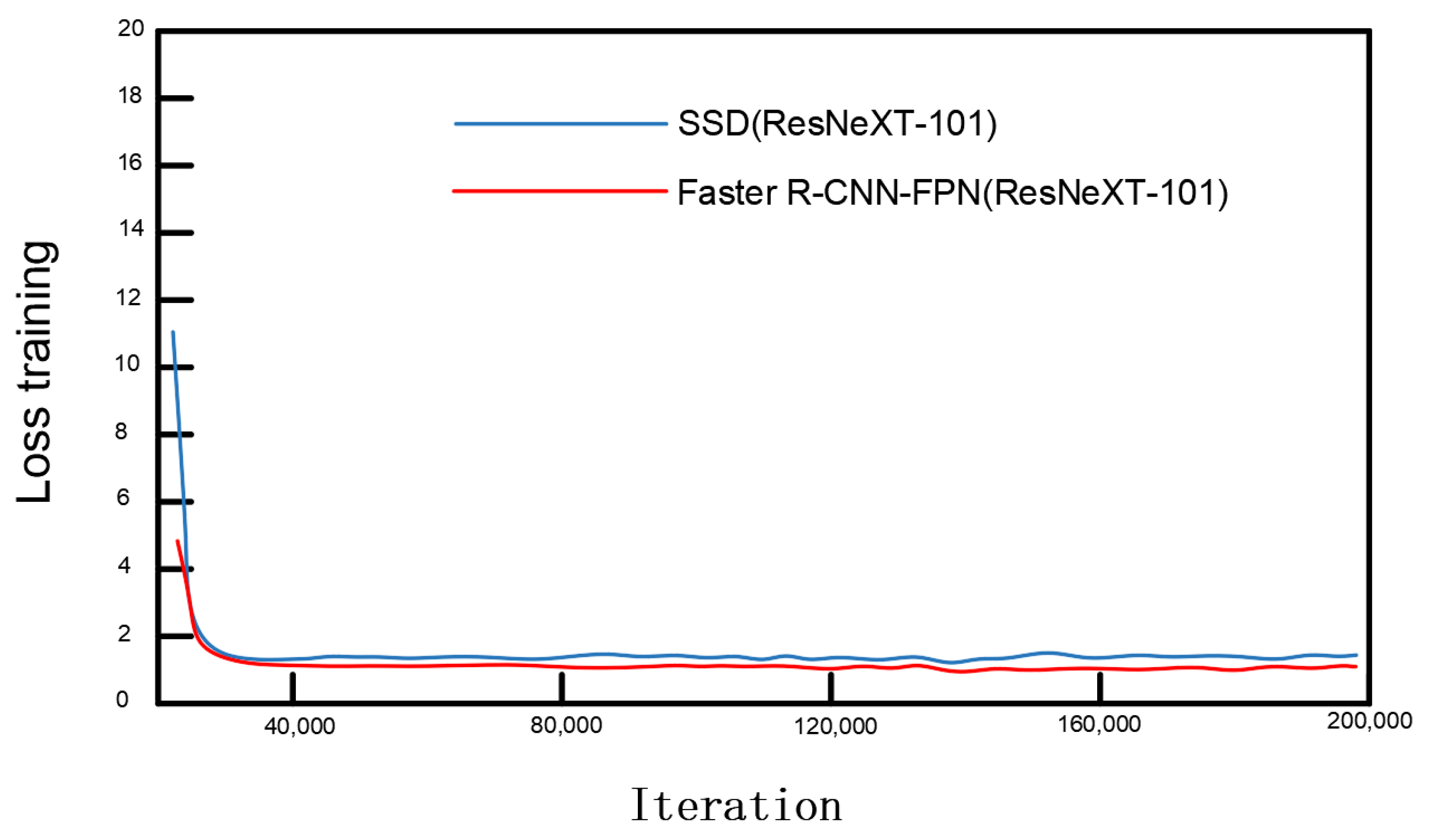
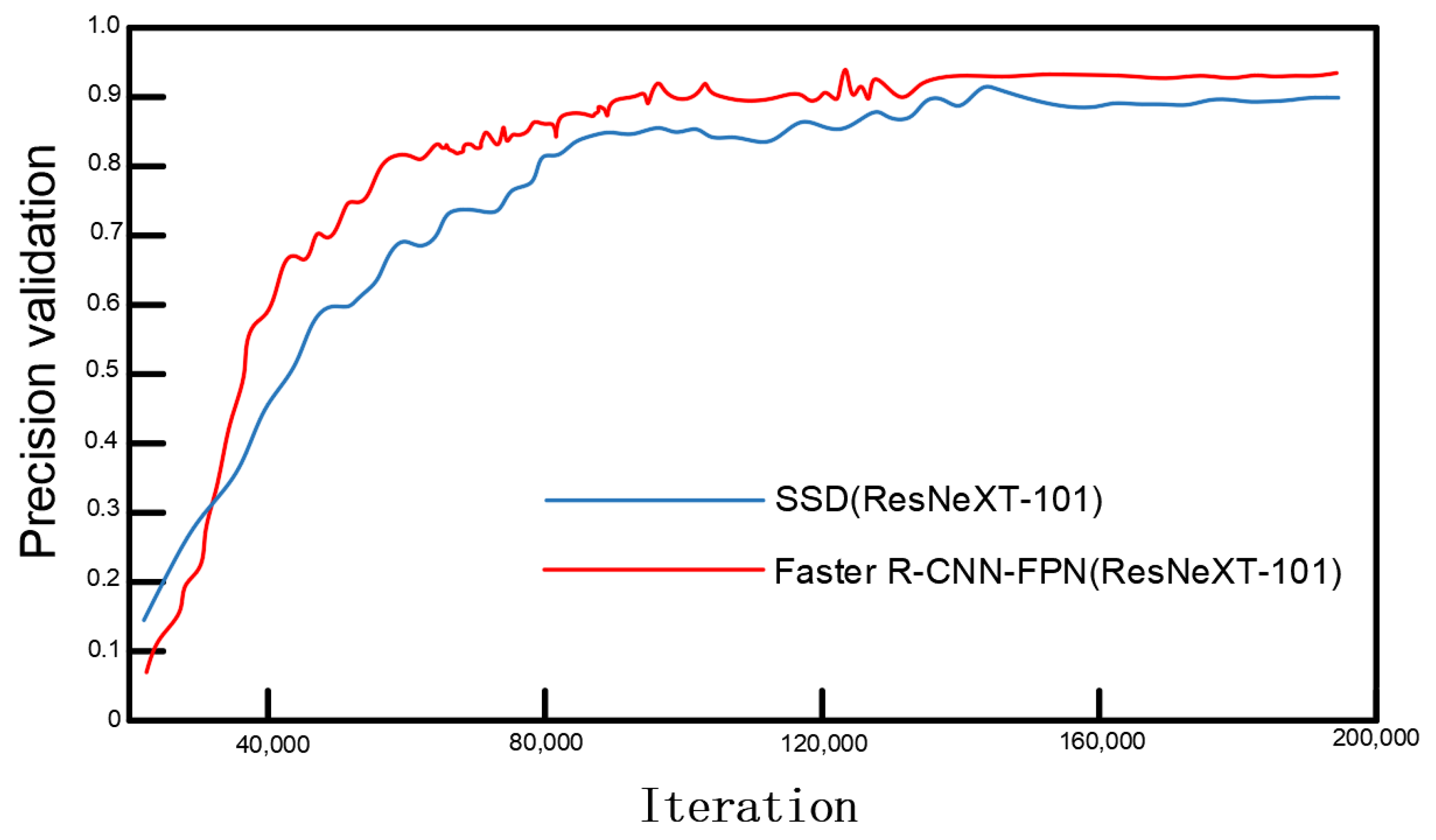
5.1. Model Training Results
5.2. Experimental Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Petrich, L.; Lohrmann, G.; Neumann, M.; Martin, F.; Frey, A.; Stoll, A.; Schmidt, V. Detection of Colchicum Autumnale in Drone Images, Using a Machine-Learning Approach. Precis. Agric. 2020, 21, 1291–1303. [Google Scholar] [CrossRef]
- Osorio, K.; Puerto, A.; Pedraza, C.; Jamaica, D.; Rodríguez, L. A Deep Learning Approach for Weed Detection in Lettuce Crops Using Multispectral Images. AgriEngineering 2020, 2, 471–488. [Google Scholar] [CrossRef]
- Sabzi, S.; Abbaspour-Gilandeh, Y. Using Video Processing to Classify Potato Plant and Three Types of Weed Using Hybrid of Artificial Neural Network and Particle Swarm Algorithm. Measurement 2018, 126, 22–36. [Google Scholar] [CrossRef]
- Bakhshipour, A.; Jafari, A. Evaluation of Support Vector Machine and Artificial Neural Networks in Weed Detection Using Shape Features. Comput. Electron. Agric. 2018, 145, 153–160. [Google Scholar] [CrossRef]
- Wu, G.; Zhu, M.; Jiang, Q.; Sun, X. Fast-Axis Collimating Lens Recognition Algorithm Based on Machine Vision. J. Phys. Conf. Ser. 2021, 1820, 012157. [Google Scholar] [CrossRef]
- Wu, Z.; Chen, Y.; Zhao, B.; Kang, X.; Ding, Y. Review of Weed Detection Methods Based on Computer Vision. Sensors 2021, 21, 3647. [Google Scholar] [CrossRef] [PubMed]
- Anthoniraj, S.; Karthikeyan, P.; Vivek, V. Weed Detection Model Using the Generative Adversarial Network and Deep Convolutional Neural Network. J. Mob. Multimed. 2021, 18, 275–292. [Google Scholar] [CrossRef]
- Cui, F.; Ning, M.; Shen, J.; Shu, X. Automatic Recognition and Tracking of Highway Layer-Interface Using Faster R-CNN. J. Appl. Geophy. 2022, 196, 104477. [Google Scholar] [CrossRef]
- Yan, D.; Li, G.; Li, X.; Zhang, H.; Lei, H.; Lu, K.; Cheng, M.; Zhu, F. An Improved Faster R-CNN Method to Detect Tailings Ponds from High-Resolution Remote Sensing Images. Remote Sens. 2021, 13, 2052. [Google Scholar] [CrossRef]
- Yujian, C.; Guoming, X.; Guochuan, S. Low Altitude Armored Target Detection Based on Rotation Invariant Faster R-CNN. Laser Optoelectron. Prog. 2018, 55, 101501. [Google Scholar] [CrossRef]
- Ma, X.; Zhu, D.; Jin, C.; Tong, X. Bullet Appearance Defect Detection Based on Improved Faster Region-Convolutional Neural Network. Laser Optoelectron. Prog. 2019, 56, 151202. [Google Scholar]
- Chen, E.; Tang, X.; Fu, B. Pedestrian Search Method Based on Faster R-CNN with the Integration of Pedestrian Detection and Re-Identification. J. Comput. Aided Des. Comput. Graph. 2019, 31, 332–339. [Google Scholar]
- Prasanna Kumar, A.; Mishra, D. Harnessing Feedback Region Proposals for Multi-object Tracking. IET Comput. Vis. 2020, 14, 434–442. [Google Scholar] [CrossRef]
- Giselsson, T.M.; Jørgensen, R.N.; Jensen, P.K.; Dyrmann, M.; Midtiby, H.S. A Public Image Database for Benchmark of Plant Seedling Classification Algorithms. arXiv 2017, arXiv:1711.05458. [Google Scholar]
- Wang, S.; Yang, L. Feature dimension reduction and category identification of weeds in cotton field based on GA-ANN complex algorithm. J. Henan Agric. Sci. 2018, 47, 148–154, 160. [Google Scholar]
- Wang, H.; Yang, J.; Xue, B.; Yan, X.; Tao, J. A Novel Color Calibration Method of Multi-Spectral Camera Based on Normalized RGB Color Model. Results Phys. 2020, 19, 103498. [Google Scholar] [CrossRef]
- Liu, S.; Xue, Q.; Li, Z.; Li, C.; Gong, Z.; Li, N. An air temperature predict model based on BP neural networks for solar greenhouse in North China. J. China Agric. Univ. 2015, 20, 176–184. [Google Scholar]
- Ranjitha, P.; Shreelakshmi, T.D. A Hybrid Ostu Based Niblack Binarization for Degraded Image Documents. In Proceedings of the 2021 2nd International Conference for Emerging Technology (INCET), Belagavi, India, 21–23 May 2021; IEEE: New York, NY, USA, 2021; pp. 914–920. [Google Scholar]
- Xu, Z.-F.; Jia, R.-S.; Sun, H.-M.; Liu, Q.-M.; Cui, Z. Light-YOLOv3: Fast Method for Detecting Green Mangoes in Complex Scenes Using Picking Robots. Appl. Intell. 2020, 50, 4670–4687. [Google Scholar] [CrossRef]
- Huang, Z.; Wang, J.; Fu, X.; Yu, T.; Guo, Y.; Wang, R. DC-SPP-YOLO: Dense Connection and Spatial Pyramid Pooling Based YOLO for Object Detection. Inf. Sci. 2020, 522, 241–258. [Google Scholar] [CrossRef] [Green Version]
- Kuznetsova, A.; Maleva, T.; Soloviev, V. Detecting Apples in Orchards Using YOLOv3. In Proceedings of the Computational Science and Its Applications—ICCSA 2020, Cagliari, Italy, 1–4 July 2020; Springer International Publishing: Cham, Switzerland, 2020; pp. 923–934. [Google Scholar]
- Lin, T.; Dollar, P.; Girshick, R. Feature Pyramid Networks for Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 936–944. [Google Scholar]
- Wang, D.D.; He, D.J. Apple Target Recognition of Robot before Fruit Thinning Based on R-FCN Deep Convolution Neural Network. Trans. Chin. Soc. Agric. Eng. 2019, 35, 156–163. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model (With ResNeXt-101) | Accuracy (%) | Recall (%) | -Value (%) | MIoU (%) | Detection Time (ms) |
|---|---|---|---|---|---|
| Faster R-CNN-FPN | 95.61 | 87.26 | 91.24 | 93.7 | 330 |
| Faster R-CNN | 92.4 | 85.2 | 88.65 | 89.6 | 319 |
| Model | Extraction Network | Accuracy (%) | Recall (%) | -Value (%) | MIoU (%) | Detection Time (ms) |
|---|---|---|---|---|---|---|
| Faster R-CNN-FPN | ResNeXt-101 | 95.61 | 87.26 | 91.24 | 93.7 | 330 |
| Faster R-CNN-FPN | ResNet-50 | 91.67 | 85.19 | 88.31 | 89.5 | 319 |
| Model | Extraction Network | Accuracy (%) | Recall (%) | -Value (%) | MIoU (%) | Detection Time (ms) |
|---|---|---|---|---|---|---|
| Faster R-CNN-FPN | ResNeXt-101 | 95.61 | 87.26 | 91.24 | 93.7 | 330 |
| YOLOv3 | ResNeXt-101 | 84.34 | 79.85 | 82.03 | 84.5 | 215 |
| SSD | ResNeXt-101 | 88.12 | 79.69 | 83.69 | 85.3 | 203 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mu, Y.; Feng, R.; Ni, R.; Li, J.; Luo, T.; Liu, T.; Li, X.; Gong, H.; Guo, Y.; Sun, Y.; et al. A Faster R-CNN-Based Model for the Identification of Weed Seedling. Agronomy 2022, 12, 2867. https://doi.org/10.3390/agronomy12112867
Mu Y, Feng R, Ni R, Li J, Luo T, Liu T, Li X, Gong H, Guo Y, Sun Y, et al. A Faster R-CNN-Based Model for the Identification of Weed Seedling. Agronomy. 2022; 12(11):2867. https://doi.org/10.3390/agronomy12112867
Chicago/Turabian StyleMu, Ye, Ruilong Feng, Ruiwen Ni, Ji Li, Tianye Luo, Tonghe Liu, Xue Li, He Gong, Ying Guo, Yu Sun, and et al. 2022. "A Faster R-CNN-Based Model for the Identification of Weed Seedling" Agronomy 12, no. 11: 2867. https://doi.org/10.3390/agronomy12112867