1. Introduction
As human space exploration accelerates, the threat posed by space debris to space activities is increasing. Strengthening the ability to monitor and remediate the space environment is, therefore, becoming more important for human space activities. It is incredibly challenging to acquire accurate orbit data on space debris due to their sheer quantity, size, material, and non-cooperative nature. Benefiting from the improvement of technology, various monitoring platforms have emerged. Currently, space-based electro-optical systems have the following advantages over ground-based electro-optical systems, ground-based radar surveillance systems, and space-based radar surveillance systems: (1) Due to operating in orbit, they are not limited by geography, climatic conditions, and atmosphere, with more observation time; (2) They have a large field of view and can effectively search and detect space objects, especially GEO targets; (3) Since space debris can be observed in close range, more detailed information on space targets can be obtained [
1,
2,
3]. After obtaining the observations, to obtain an object’s orbit information, it is urgent to find an initial orbit determination method suitable for space-based platforms with better stability and smaller errors [
4].
The evaluation of the initial orbit determination method focuses on success rate, computational efficiency, error magnitude, etc. In practice, the results of the initial orbit determination are often used for initial orbit association, so the accuracy requirements are different from other applications. The initial orbit association study presented by Zhao et al. shows that the association of two arc segments can still be accomplished when the semi-major axis error is less than one hundred kilometers [
5]. Secondly, a higher success rate is extremely important due to the increasingly changing space environment. For some application cases, such as space-based laser cleanup, it is very important to complete the IOD in less time than the observation arc length [
3].
Due to the limitations of the optical observation theory compared with radar observation equipment, the observations obtained by optical sensors only have angular information, a lack of distance information, and low accuracy. Angle-only IOD has long been a hot topic of research due to the data acquisition characteristics of optical observing systems. There are two major types of traditional methods, Laplace and Gauss, which were initially used to compute non-artificial celestial objects [
6,
7]. In order to observe more space debris, the arc lengths acquired by space-based observation tend to be shorter, which leads to more non-convergence as well as poorer accuracy in traditional methods [
8,
9]. Many studies and improvements to the Laplace and Gauss methods have been developed to better apply these methods to the IOD of space debris. Firstly, in terms of introducing least squares into the Laplace method, for example, Jia et al. analyzed and avoided its pathologies to improve stability [
10], and Wang et al. transformed the least squares method into least absolute deviation to make the breakdown point of the method higher and the computational process more stable [
11]. Secondly, for the Laplace method, Lu et al. proposed a unit–vector method applicable to combinations of different observations with a single revolution from a single station [
12]. Liu et al. solved the problem of trivial solutions arising from this method by projecting the system of observational equations to the observational coordinate system they established [
13]. For the problem of the trivial solution in the Laplace method, Gan et al. avoided it by removing the trivial solution factor from the solution equation [
14]. Since the solution equations of Gauss and Laplace are polynomial equations of order 8, the problem of multiple solutions inevitably arises. Der et al. analyzed this and proposed their method to solve the problem [
15].
Unlike traditional methods, Milani et al. introduced the concept of the admissible region into IOD, and many subsequent studies have improved and extended based on this idea [
16]. However, the accuracy of the results obtained by this type of method depends on the orbit propagation accuracy, the density of the triangular grid, and the accuracy of the observations, which makes this type of method less applicable in the case of very short observations [
17]. DeMars et al. used the Gaussian mixture model to fit the probability density function on the admissible region and then utilized a traceless Kalman filter for dynamic estimation to obtain their final results [
18]. The method has high accuracy for the case of multiple arc segments from the same object, but its accuracy is not satisfactory for the case of a single very short arc segment.
In recent years, methods based on Lambert’s equation have emerged. Huang et al. proposed a semi-major axis search method that combines a single-parameter orbit solution to Lambert’s equation, but it is not suitable for spatial objects in LEO as it depends on small eccentricities [
19]. Sang et al. proposed a distance search method based on Lambert’s equation, but this method is not competent for the application scenario of fast IOD due to its poor computational efficiency [
20]. The Gooding method is based on the improved Lambert equation proposed by Lancaster [
21,
22,
23]. Due to its elimination of the multi-solution problem for the semi-major axis, it has better convergence and computational efficiency, but it still has issues, such as large influence by initial value, poor stability, etc. Ansalone et al. applied genetic algorithms to the problem of very-short-arc orbit determination, which converts the orbit determination problem into an optimization problem [
24]. The use of genetic algorithms avoids the classical optimization algorithms that require more accurate initial values and tend to converge to local solutions. Li et al. also introduced particle swarm optimization into the initial orbit determination based on the idea of optimization algorithms [
25].
Through the above introduction, it can be seen that the existing algorithms for dealing with IOD using space-based observations still have the problems of low solution accuracy, slow convergence speed, poor convergence, etc. Therefore, to better monitor the impact of space debris on space, the search for an IOD algorithm suitable for space-based platforms with good convergence, higher accuracy, and computational efficiency is still challenging. The Gooding method has become a widely used IOD method due to its wide range of adaptability, high success rate, and computational efficiency, which is used in the IOD toolkit for AGI [
26]. To preserve its excellent features and, at the same time, make it perform better in space-based observation environments to fulfill more application scenarios, the Gooding method is improved in this paper.
3. Improvement of the Gooding Method
3.1. SIVD Method
To address Problem (I), this paper proposes a method applicable to the initial value selection of the Gooding method, the single-parameter initial value determination (SIVD) method. A brief introduction is given below.
From Equations (1), (2), (4) and (5), it follows that
Substituting Equation (10) into Equation (20), we obtain the following:
The relationship between and can be seen from Equation (21). Since is always greater than 0, can be derived when . This is not consistent with the elliptical orbit parameter case. Therefore, the initial value should be chosen to avoid the case that makes .
We first assume that the orbit of the object is a circular orbit, and an objective function can be constructed using the angular data obtained from observations [
28]. Obviously, in theory
.
where
The
is the inclination of orbit. According to Kepler’s third law,
in Equation (23) can be calculated directly from the assumed
. The computation of
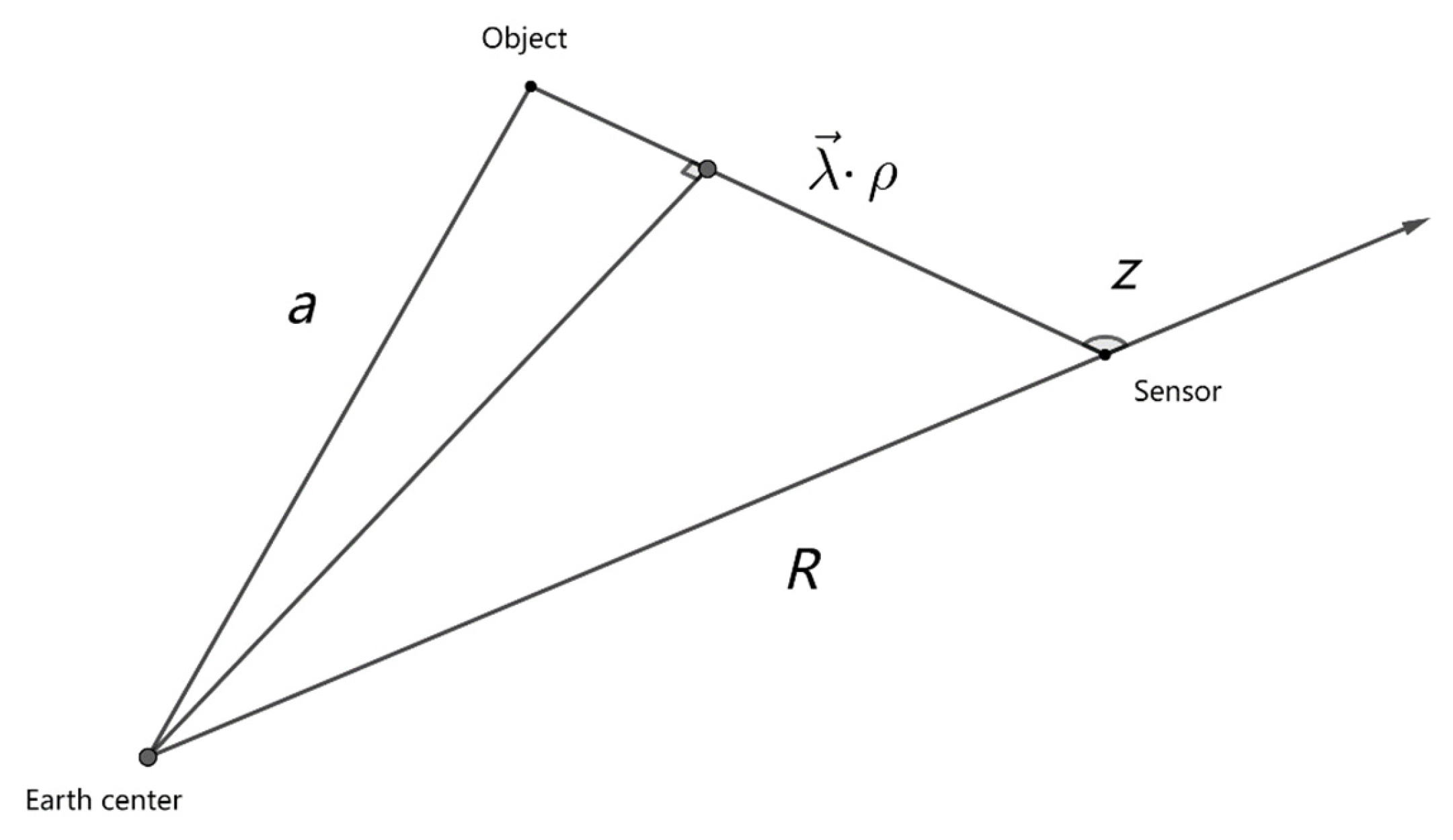
obviously needs the geocentric vectors
and
of the target, which are computed as follows:
where
is the zenith angle. The geometric relationships are shown in
Figure 3.
Finally, fast convergence can be achieved by using Newton’s iterative method (the initial value can be chosen as ). Thus, the required initial value is obtained ( and ).
Since the above process is performed under the assumption that the orbit is circular, further processing is required to minimize the effect of eccentricity. From Equations (6)–(9), it can be seen that when the angle between the geocentric vectors of the two calendar elements is fixed, the larger the modulus of the two vectors, the larger
is. From Equation (23), it can be seen that the solution of
involves only the angle of the vectors. So, when
is too large, it is usually caused by
or
being too large. The problem can be solved by reducing
and
. Since the eccentricity of the LEO target is generally less than 0.25 [
29], the corrections (
and
) can be set to 10% of the values of
and
, and several iterations will converge.
3.2. Improvement of the Objective Function
In
Section 2.2, Question (II) is posed. From Equation (12), it can be seen that there is no essential difference in the geometrical relationship between the ground-based optical surveillance and the space-based optical surveillance. Lambert’s equation is built on the basis that the object follows Kepler’s motion as follows:
Clearly, the motion of ground-based sensors does not follow this equation, whereas space-based sensors do. Thus, the object position vector when in Equation (12). For space-based platforms, this still satisfies the solution of Lambert’s equation. By substituting this result into the objective equation, it can be found that there is still a solution.
To remove this trivial solution, the objective Function (29) needs to be downgraded.
The objective function after being downgraded is
. It can be noticed that the objective function becomes dimensionless. Since the magnitude of the independent variable is in units of length, if this value is used for iteration, the deviation from its required corrective value is too large. Therefore, the objective function can be set to
. Since the minimum value of
is
when
, the objective equation constructed by this function will no longer have a trivial solution.
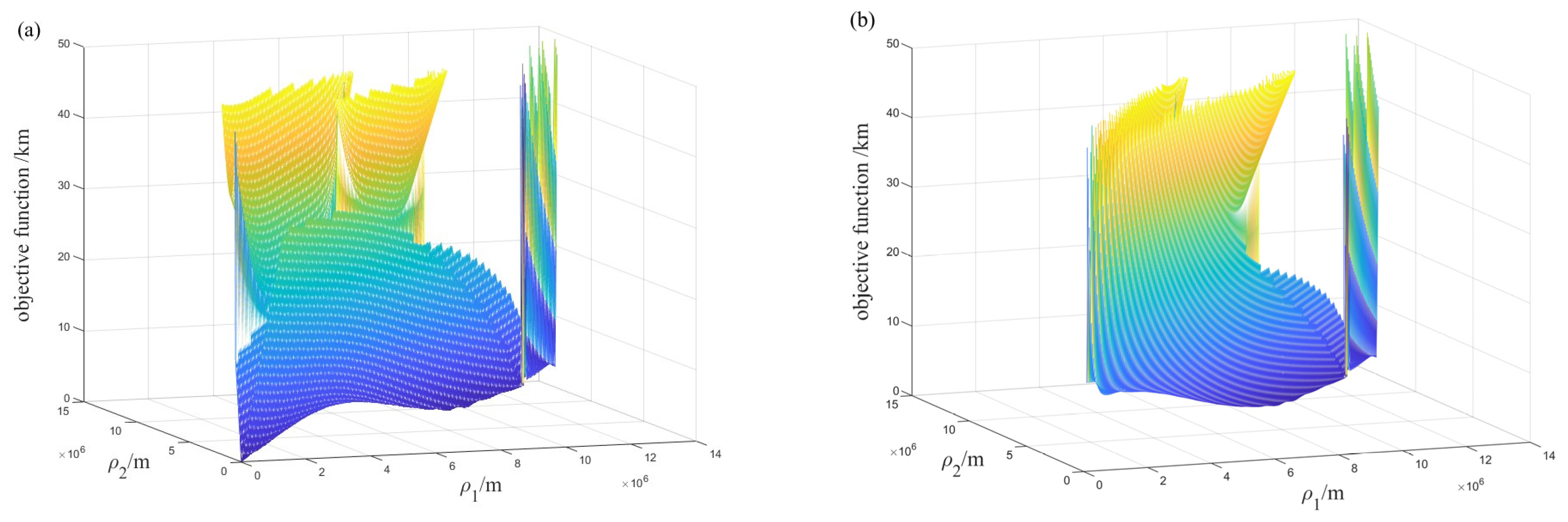
Figure 4 illustrates two objective function figures. It can be seen that (a) is a figure of the original objective function with two equation solutions, one of which is the trivial solution, while (b) is the figure of the improved objective function; there is only one solution to the equation, and it still has the original convergence.
3.3. Restricted Corrective Value Solution Method
Gooding’s method has a high success rate but still fails to converge on about 10% of the data. This is mainly caused by the large deviation from the corrective value. When the independent variable is in the region where the slope tends to zero and the function value is again large, according to Equation (19), the corrected value becomes extremely large at this point. In the case of reasonable initial values, this is mainly due to the large corrective value, which leads to an error in the or obtained from the independent variable. Therefore, the problem that the independent variables will iterate to unreasonable values needs to be removed. In this paper, we propose an approach to corrective value-solving using constraints.
When the independent variable appears to be less than 0 (i.e., or ), let (where is the number of times the independent variable appears to be less than 0). Similarly, for the independent variable corresponding to the desired , let , , where is a signum function, −1 when the parameter value is greater than 0, and 1 otherwise.
3.4. Fitted-Curve Noise Suppression Method
In a certain observation condition for many repeated measurements or in a time series of measurements, there is always a value and sign are not fixed, without any law of change, but the overall compliance with certain statistical characteristics (mean, variance and distribution) of the error is called random noise. Problem (IV), obtained from the analysis, shows that this error has a non-negligible effect on the Gooding method.
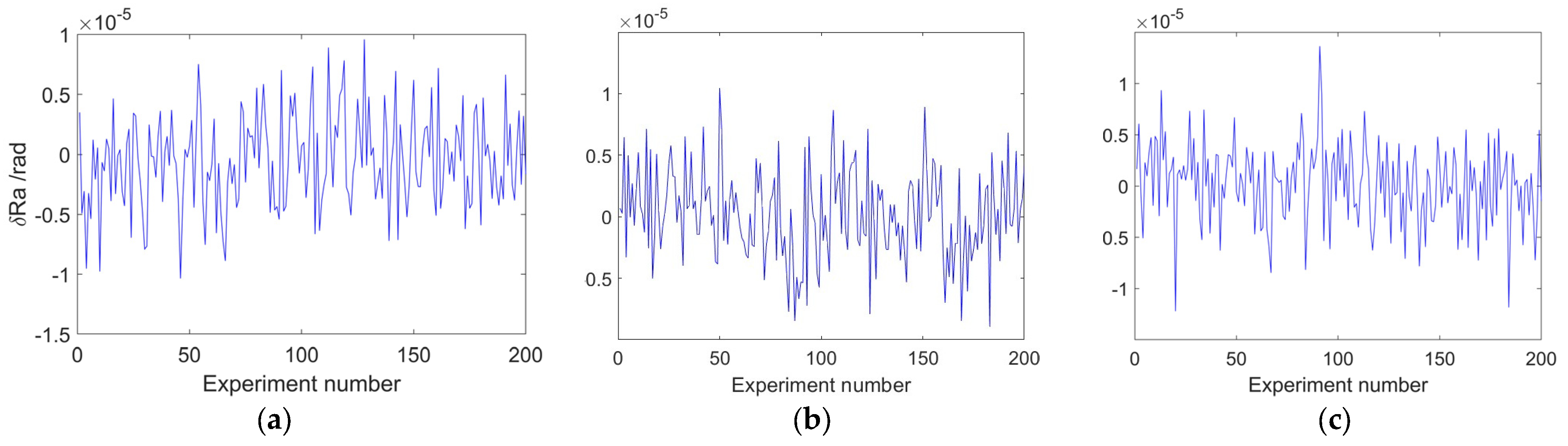
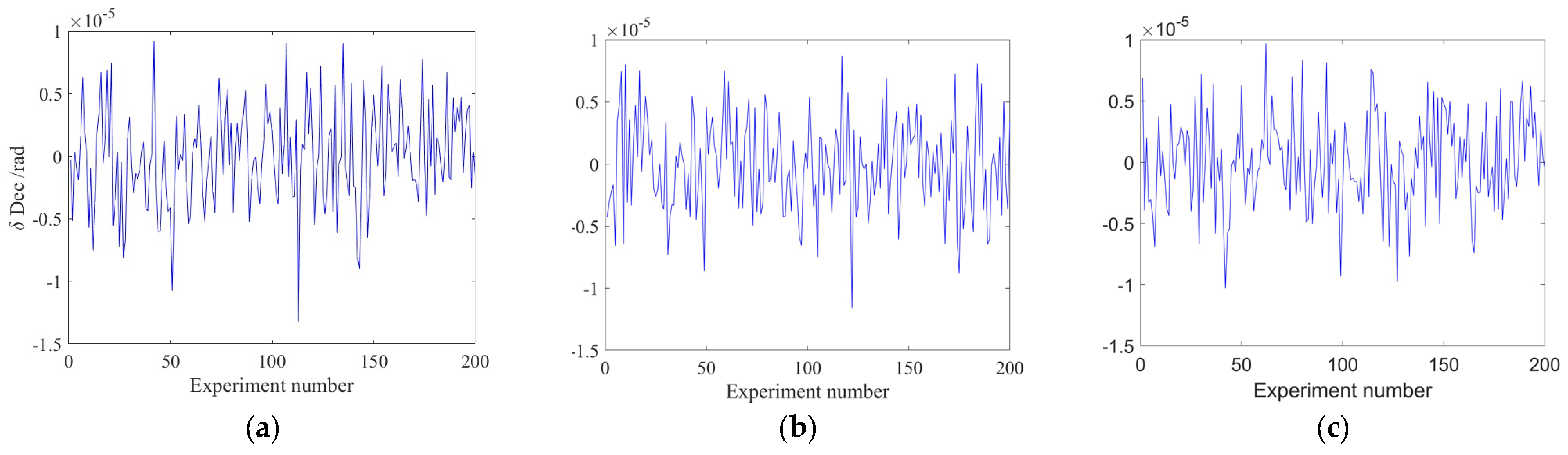
Polynomial fitting is simple, fast, and practical, which is more suitable for quickly solving the initial orbit. Two important parameters that affect the effectiveness of polynomial fitting are the number of fitted points and the polynomial order. Since the observational arc segment is very short, the variations in both right ascension and declination are extremely small, and the change process is smooth. Therefore, the improvement needs can be achieved by using a third–order polynomial and fitting using all observations. For validation, the existing observations are added to 4″ Gaussian noise and then processed and compared with higher–order polynomial fitted-curve noise suppression, respectively, and the results are shown in
Figure 5 and
Figure 6.
The three respective plots in
Figure 5 and
Figure 6 show, from left to right, the error compared to the original observation after noise suppression of the data points using third–, fifth–, and seventh–order polynomials. It can be seen that the processed error is on the order of 10
−6, with an RMS value of about 3.8 × 10
−6. This shows that the method is effective in minimizing the original noise. Also, from the comparison, it can be seen that higher-order polynomials do not provide better noise suppression.
Aiming at the specific characteristics of space-based space debris observation and combining with the improvement method proposed above, this paper proposes a very-short–arc IOD method for LEO objects applicable to space–based sensors, the main flow of which is shown in
Figure 7.
5. Discussion
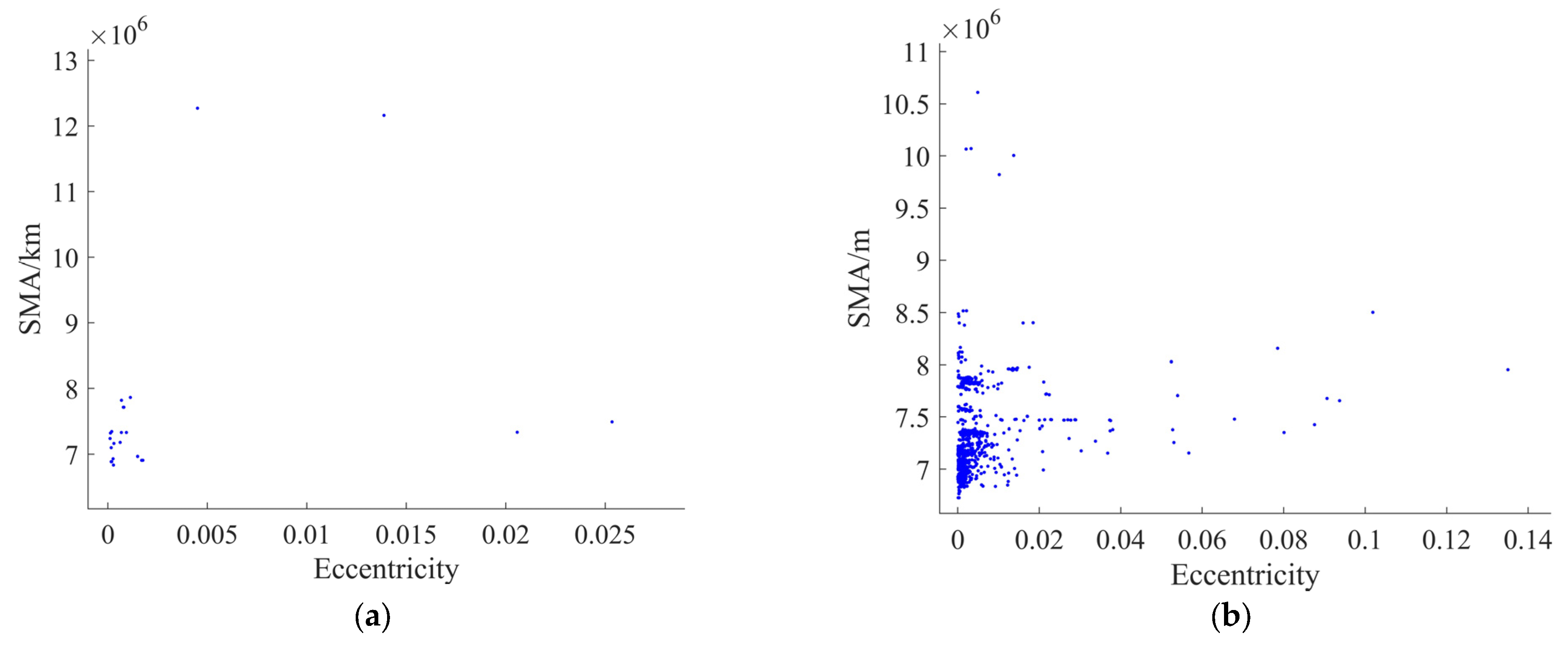
The simulated data are reasonable. From
Figure 9, we can see that the objects’ SMA (semi-major axis) ranges from 6500 km to 13,000 km, and the eccentricity ranges from 0 to 0.14. In addition, the eccentricity of less than 0.05 and the SMA of less than 8500 km are both 99% of the quantity. From
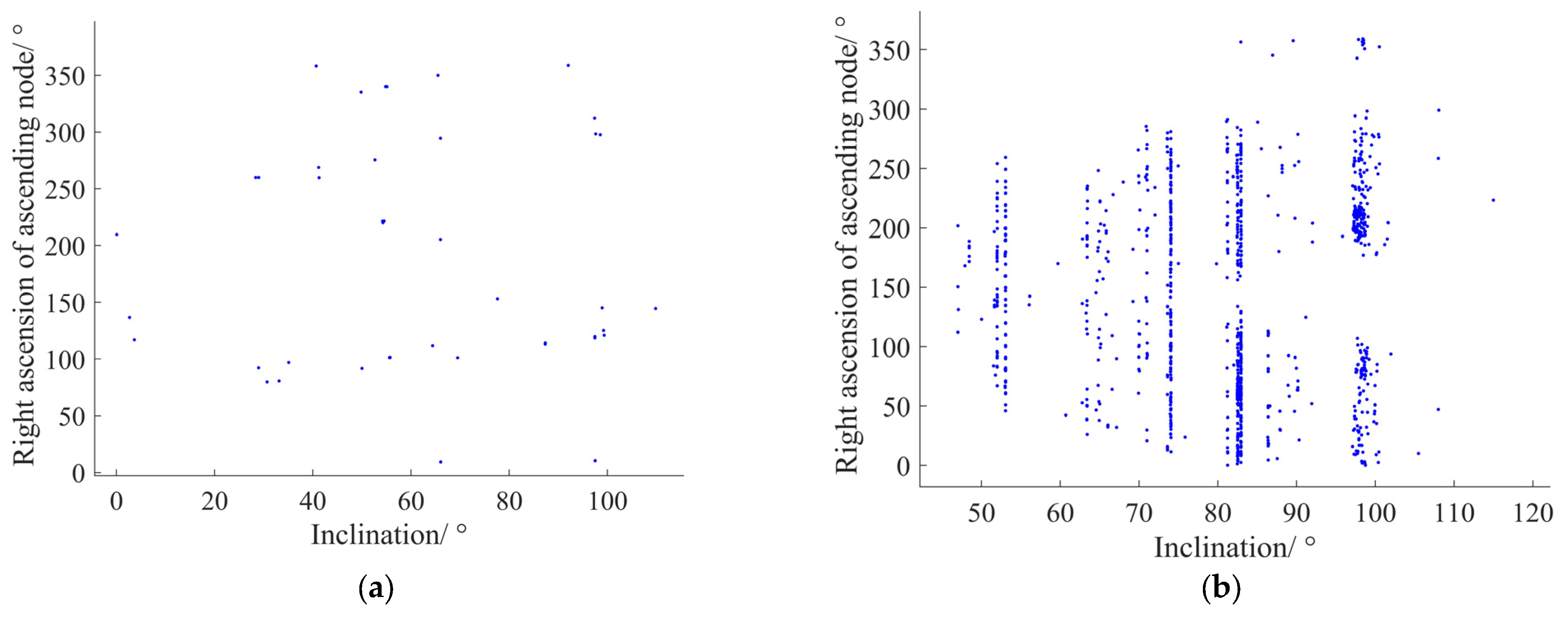
Figure 10, it can be seen that the objects’ inclination ranges from 0 to 360°, and the right ascension of the ascending node ranges from 0 to 120° (this has a strong relationship with the sensor’s location at high latitudes and its observation methodology). However,
Figure 10b shows that some objects have the same inclination. Many of these co-planar satellites are star-link satellites.
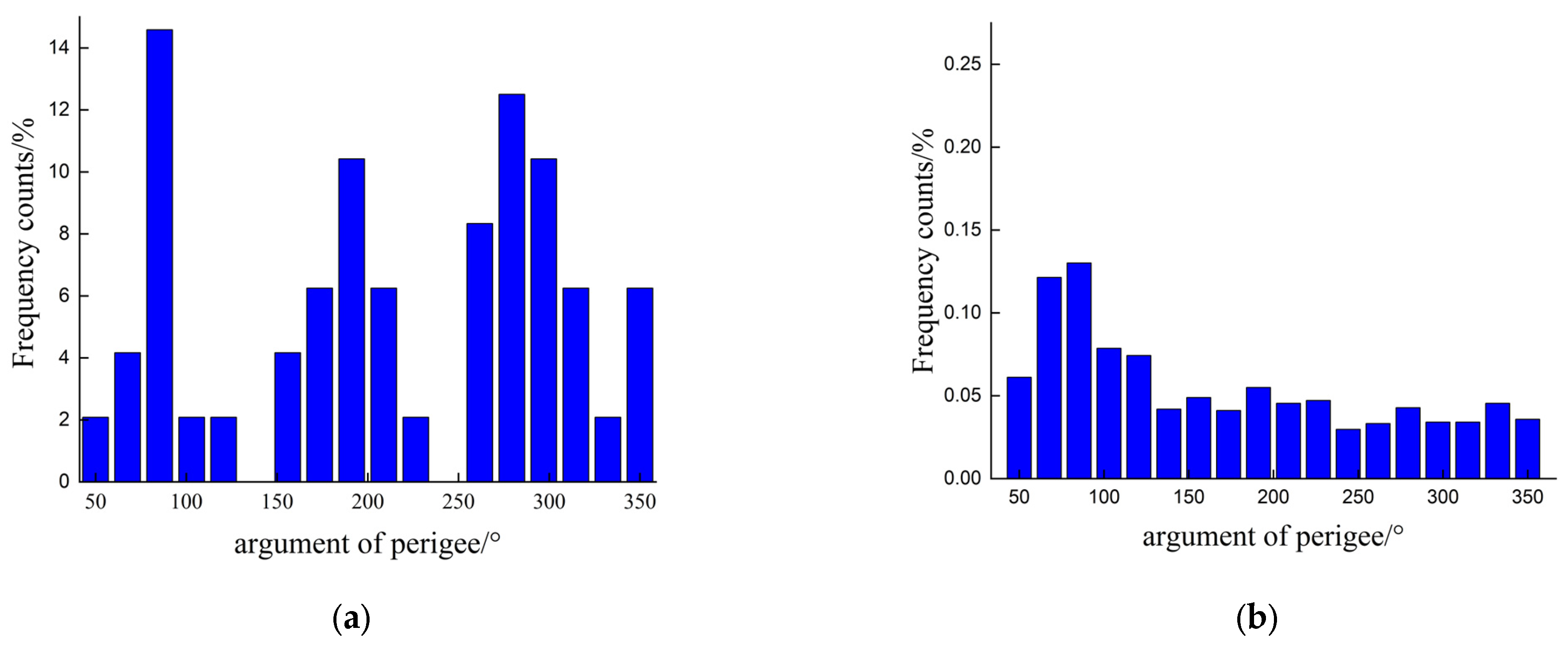
Figure 11 shows that the argument of perigee ranges from 0 to 360°. As can be seen, these data distributions above are comprehensive and homogeneous and contain the orbital characteristics expected of LEO targets.
From
Table 1, it can be seen that after processing with the proposed noise suppression method, the accuracy of each track is significantly improved. The improvement in the SMA, the inclination, and the ascending node declination is relatively greater, reaching 32%, 40%, and 47.5%, respectively. At the same time, this shows that the 4″ level of noise error in the observations does have a significant influence on the IOD calculation using the Gooding method. However, in conjunction with
Figure 5 and
Figure 6, it can be seen that the processed observations still have Gaussian noise errors of about 1″ and still affect the IOD results. Therefore, the proposed method may not give better results when the accuracy of the observation equipment used is high.
The SIVD method and the improvement of the objective function have significantly improved the accuracy of the Gooding method for processing space-based observations. From
Table 2, it can be seen that the Gooding method with SIVD has better performance for solving each parameter. The improvement reaches 40~65%. This is mainly due to the fact that the SIVD can provide an initial value with a small error, which makes the convergence result converge to the true solution instead of incorrect solutions (e.g., trivial solutions, negative values, etc.) and also reduces the number of iterations. The result shown in
Table 3 indicates that the improved objective function allows the Gooding method to be applied to space-based observations. In the example of the SMA, the percentage of errors less than 200 km reaches 83%, which is a 33% improvement compared to the Gooding method. The improved objective equation removes the trivial solution, which makes it possible for even large errors in the initial value not to cause the result to converge to the trivial solution, so the overall accuracy is improved. From
Table 4, we can see that the restricted corrective value solution method offers relatively little improvement to the Gooding method, mainly due to the fact that the corrective value does not have a significant effect on the solution and convergence trend.
The improved method in this paper has better performance in processing larger quantities of simulated space-based data. As can be seen from
Table 5, the method proposed in this article has better performance in terms of success rate, reaching 99%. Secondly, for each interval of the semi-major axis error, the proposed method is consistently better than the Gooding method. Especially in the smaller error interval of ≤20 km, the proposed method accounts for 71%, equivalent to 2.4 times that of the Gooding method. In
Table 6, it can be seen that the proposed method still performs better. Within the error range of ≤1°, the proportions of the proposed method’s output results are 2 to 3 times higher compared to the Gooding method and are all above 90%. Then, the proposed method still performs better in intervals where the error is much smaller. Taking the error of the right ascension of the ascending node as an example, within the error range of ≤1°, the proportion of the proposed method’s output results is 3.1 times higher compared to Gooding’s method, reaching 49%. Next, the comparison reveals that the algorithms in this paper have the same and uniform degree of accuracy enhancement for the inclination and the right ascension of the ascending node.
The improved method has the best performance in processing larger quantities of real-world data (results in
Table 7). Firstly, in terms of success rate, the proposed method still achieves a success rate of 99%, which shows that it has excellent stability in handling different types of data. Secondly, the proposed method inherits the computational efficiency of the Gooding method, and due to the characteristics of the geometric model used in the method, the computational speed of the method does not decrease due to the increase in the number of data points in the arc length. The computing time of the average improvement method is about 0.07 s, which is much less than the period (1~2 s) for the sensor to collect data. The I-Gooding method has a 61% success rate. This is mainly due to the fact that the method requires an initial value with high precision (error less than 5 km), and the experience threshold also affects the result [
26]. The average computation times of the RS method and the I-Gooding method are 0.82 s and 0.38 s, respectively. This is because both of them need to compute all the observations of a segment (the computation time increases as the arc length increases), and the RS method needs to perform the orbital prediction, so its computation time is longer.
In terms of accuracy, the proposed method performs best on all three orbit parameters of the solutions. Three methods have the same performance in terms of inclination errors. The Gooding method has a significant gap in solving SMA relative to the other two methods. Errors of less than 3° in the right ascension of the ascending node reached only 89% of the solutions calculated by the RS method. This may be related to its general performance in describing track-plane pointing [
26].
Through the above experimental results, it can be seen that the proposed method is better than the Gooding method in terms of overall results. First, the proposed methods all achieved a success rate of about 99%. Secondly, in terms of error, there is an improvement in all orbital parameters. For example, in terms of the SMA of the orbit, the proportion of results with an error of less than 100 km is around 94%. Compared to the Gooding method, this result has improved by nearly double. The proposed method also performs well in terms of computational efficiency. The average computation time is about 0.065 s, which is much smaller than the arc length of the observed data as well as the sampling period.
6. Conclusions
In this paper, the Gooding method is analyzed for application to IOD in space-based observation environments, and a new method for IOD is proposed based on it. We evaluate the proposed method in comparison to the Gooding method, and the simulation results not only validate our theoretical derivation but also show that the overall results of the proposed method are better than those of the Gooding method. Among them, the proposed method can reach 99% in terms of success rate. The proportion of computed results with an SMA error of less than 100 km, an inclination error of less than 1°, and a right ascension of the ascending node of less than 1° all exceed 90%. Since IOD is the key to cataloging space debris, the proposed method would significantly contribute to cataloging space debris in the future. For example, the higher the initial orbit accuracy, the faster the convergence speed of accurate orbit determination. In addition, with higher accuracy of the initial orbit parameters, the arc segments can be briefly categorized, which is very helpful for the efficiency of the initial orbit association. Secondly, the improvement of its success rate is also based on this. In the future, we plan to conduct a study of the initial orbit association based on the proposed method, followed by applying the method to the IOD of GEO objects and analyzing its performance. Meanwhile, we will further study the noise processing of the observations in the hope of finding a more effective noise-suppression method.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}