6.1. Precise Slant Range Model Validation
The simulation verification was conducted using the parameters of the GEO SAR satellite [
27,
28,
29,
30]. Operating in an inclined geosynchronous orbit (IGSO), this advanced satellite offers SAR observation capabilities with hourly coverage, a wide swath (500–3000 km), a moderate resolution (20–50 m), all-weather capabilities, and continuous monitoring throughout the day. The obtained SAR images in the L-band can be applied to industries including disaster reduction, land management, seismic activities, water resources, meteorology, oceanography, agriculture, environmental protection, and forestry. The orbital elements and radar parameters of the GEO SAR satellite are provided in
Table 2.
The satellite operates in a geosynchronous orbit with a revisit cycle of 1 day.
Figure 6 illustrates the orbital path of the satellite based on the orbital elements provided in
Table 2. The target in
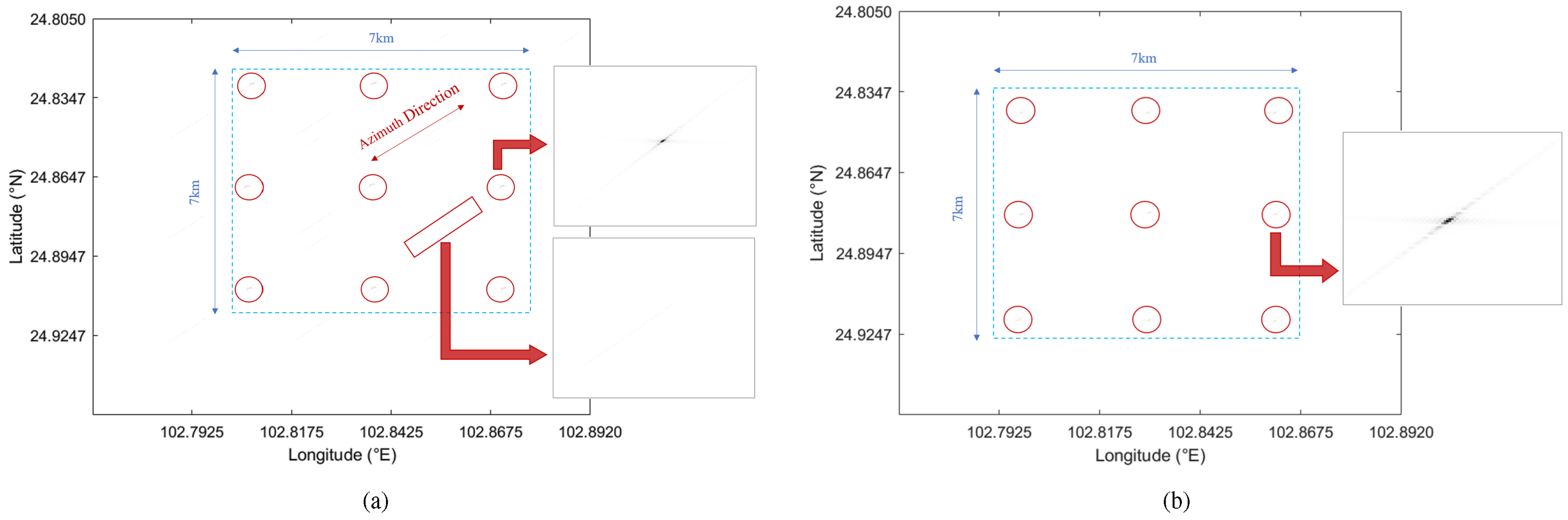
Figure 6 is the central point of the observed target array set by the simulation, located at 102.83 degrees east longitude and 24.88 degrees north latitude. The target array consists of nine point targets with an array size of
km.
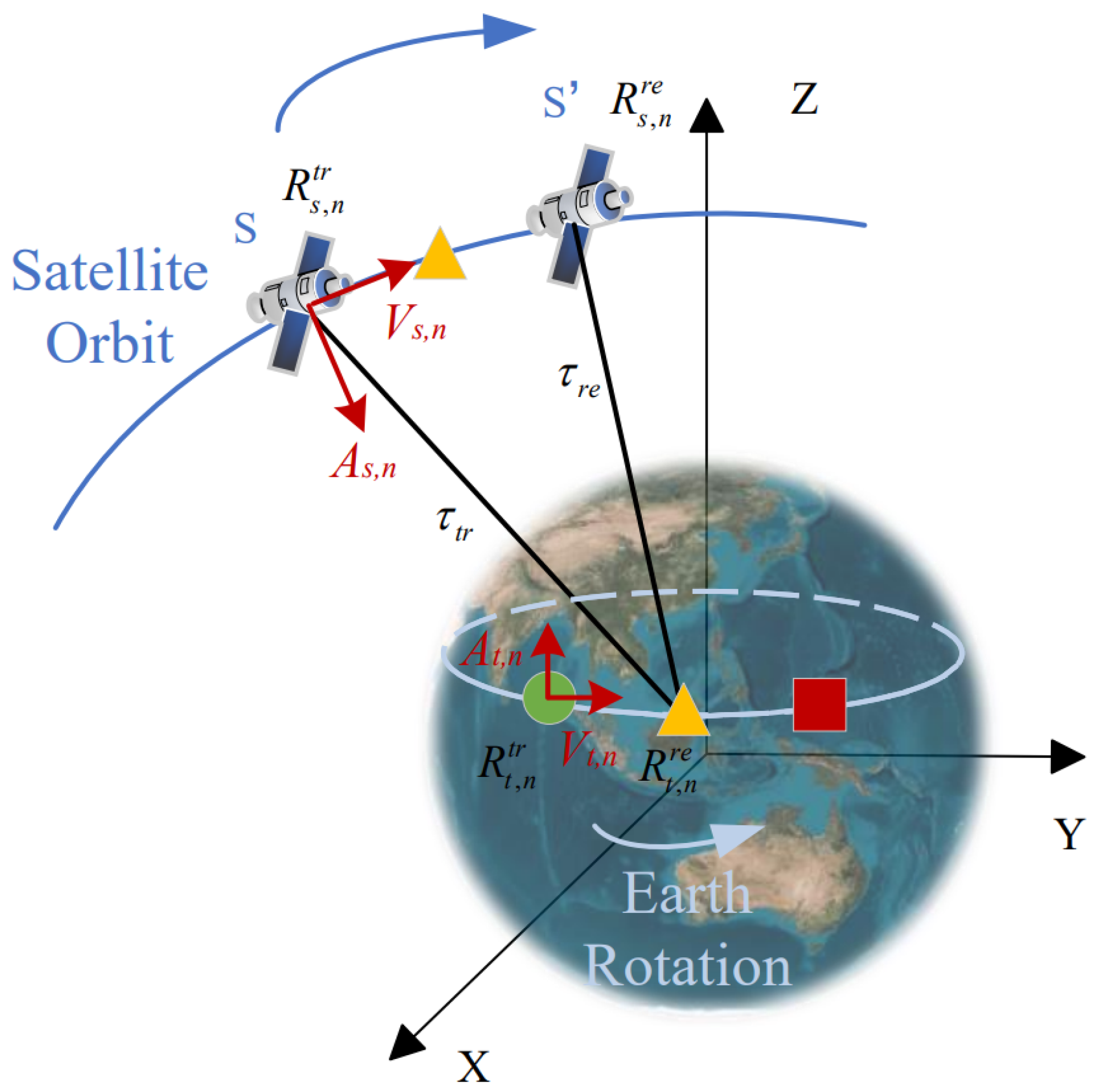
The SAR satellite operates in a geosynchronous orbit at a height of 36,000 km. The separation between the transmitter and receiver is more than 1 km, and this separation phenomenon intensifies with the increasing imaging off-nadir angle of the GEO SAR. The curvature effect of the satellite orbit should be taken into account, as the motion of the target caused by the Earth’s rotation is influenced by the Earth’s curvature. Directly calculating the slant range without considering the orbit curvature effect, the Earth’s curvature impact, and the elliptical shape of the satellite orbit can introduce errors in the precise slant range modeling of the geosynchronous SAR. These errors are magnified with an increased synthetic aperture time, larger off-nadir imaging angles, and greater satellite orbit eccentricity. The magnitude of slant range errors for different azimuth samples is illustrated in the graph shown in
Figure 7.
Figure 8a represents the imaging results obtained without accounting for the satellite and target motion during the pulse transmission and reception process. As a result, each point target in the target array showed significant defocusing in the azimuth direction and experienced a displacement.
A Precise Slant Range Model was constructed using the satellite’s velocity and acceleration to describe the curvature motion of the radar along the satellite orbit and the circular motion of the target caused by the Earth’s rotation during the signal’s travel time from transmission to reception. The imaging results of one of the point targets based on the PSRM are shown in
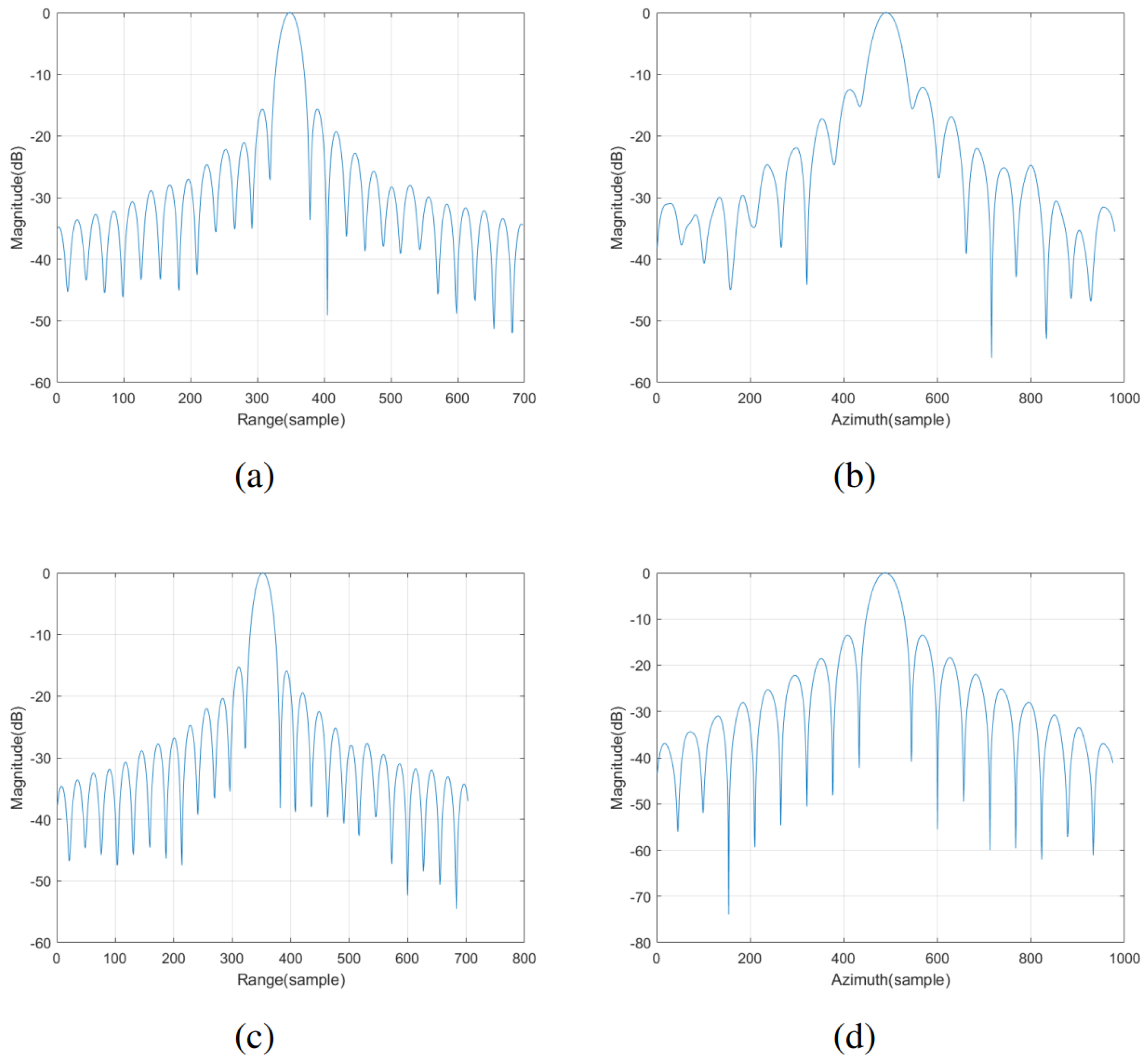
Figure 8b. The azimuth and range profiles are presented in
Figure 9. A significant improvement in the focusing quality of the point targets was observed compared to the direct calculation of the slant range. The peak sidelobe ratio and integrated sidelobe ratio of the focused point targets are provided in
Table 3. The Precise Slant Range Model considered the motion of the satellite and target points in the GEO SAR “Stop-and-Go” assumption errors, enabling a more accurate calculation of the slant range between the satellite and target and enhancing the imaging quality.
6.2. Interpolation Method Selection Validation
The key to the proposed AEBP algorithm is utilizing interpolation instead of directly calculating the slant range for each grid point. By employing interpolation methods, the computational burden of three-dimensional array slant range calculation is reduced, leading to a significant improvement in computational efficiency. There are various interpolation algorithms available, and the choice of interpolation method is crucial. In this study, we considered three closely related interpolation methods:
- (1)
Nearest-Neighbor Interpolation: The numerical value of the nearest neighboring grid point is replaced with that of the grid control point.
- (2)
Bilinear Interpolation: This method extends the linear interpolation of an interpolation function with two variables. The core idea is to perform a linear interpolation in each direction separately.
- (3)
Bicubic Interpolation: Bicubic interpolation is a sophisticated method that utilizes the numerical values of the 16 surrounding points to calculate a cubic interpolation. It considers the influence of the four adjacent points as well as the variation rates between neighboring points.
To determine the optimal interpolation method, an experiment was conducted using a grid of size 3000 × 3000 with 1 m grid spacing. The target point was positioned at the grid’s center. The slant range between the satellite and each grid point was calculated using the three aforementioned interpolation methods, as well as the direct slant range calculation method. The errors in the slant range between the three interpolation methods and the directly calculated range were measured and are illustrated in
Figure 10. The computation time and maximum slant range error are presented in
Table 4.
The Nearest-Neighbor Interpolation method demonstrated the fastest calculation speed but introduced larger slant range errors, resulting in lower image quality. Bilinear Interpolation, which employed 4 () grid points to compute a new point, performed slightly worse than Bicubic Interpolation but offered a faster calculation speed. Bicubic Interpolation, on the other hand, employed 16 () grid points to compute a new point, resulting in the smallest slant range error and superior image quality. However, this advantage was accompanied by a significant increase in computational load. Therefore, Bilinear Interpolation was selected as the method for efficiently computing the slant range of grid points in the AEBP algorithm.
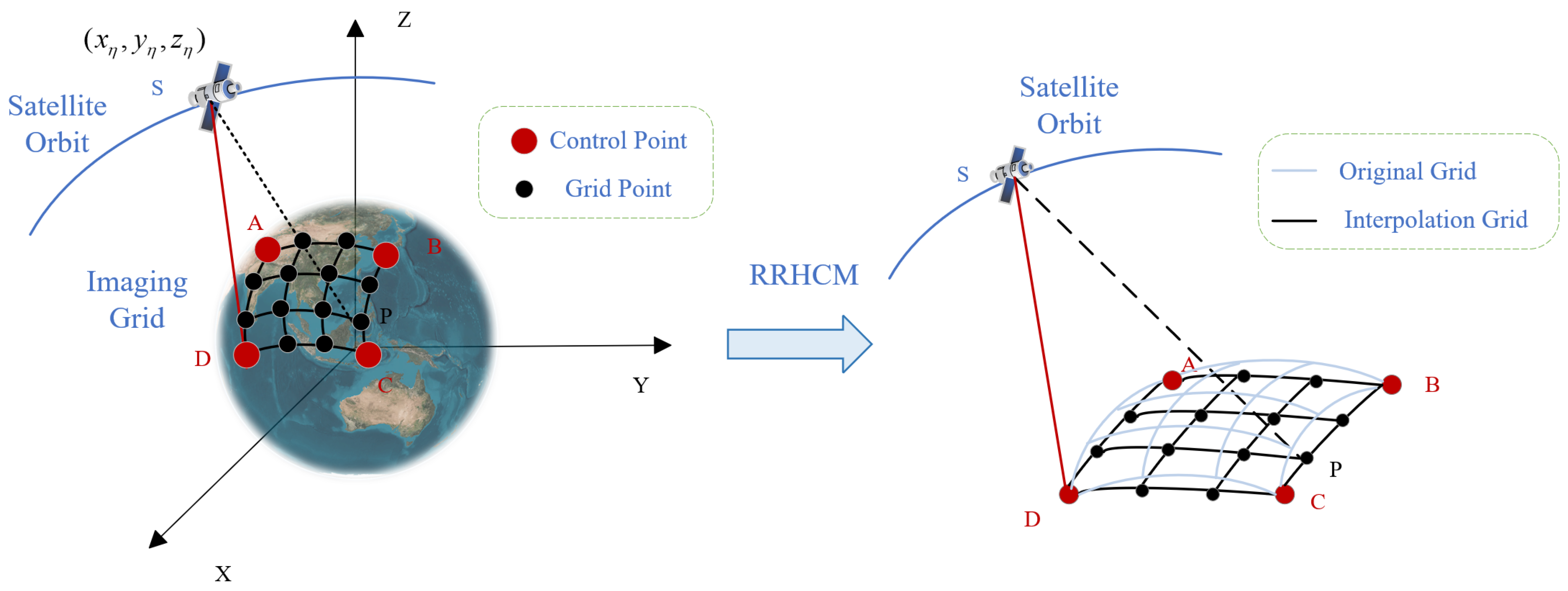
6.3. Validation of AEBP Based on PSRM and RRHCM
GEO SAR for Earth observation possesses the characteristics of frequent revisits, broad coverage, and the ability to conduct focused observations of particular areas. To prevent the occurrence of blind zones, the receiving pulse window of spaceborne Synthetic Aperture Radar (SAR) must be distinct from the transmitting pulse window. A higher resolution and slant angle lead to an increased synthetic aperture time and range cell migration (RCM). In certain azimuth positions, specific beam placements in the system design must be chosen near blind zones. However, due to the influence of range cell migration (RCM), echo pulses received from these positions may surpass the receiving window. Conversely, reducing the width of the range swath is necessary to ensure the complete reception of all echo pulses. To overcome these challenges and mitigate the influence of range cell migration (RCM) on the range swath, GEO SAR utilizes a variable Pulse Repetition Frequency (PRF) technique. The continuous modification of the PRF results in a more dispersed distribution of blind zones. The positions of the blind zones and the choice of PRF are deterministically linked. A fixed PRF would result in a fixed distribution of blind zones, while continuous PRF variation causes the blind zone positions to change along the azimuth direction. The combination of the variable PRF technique and high-resolution oblique SAR staring mode in satellite-borne SAR ensures a reduced data volume for the echo while maintaining the range swath width.
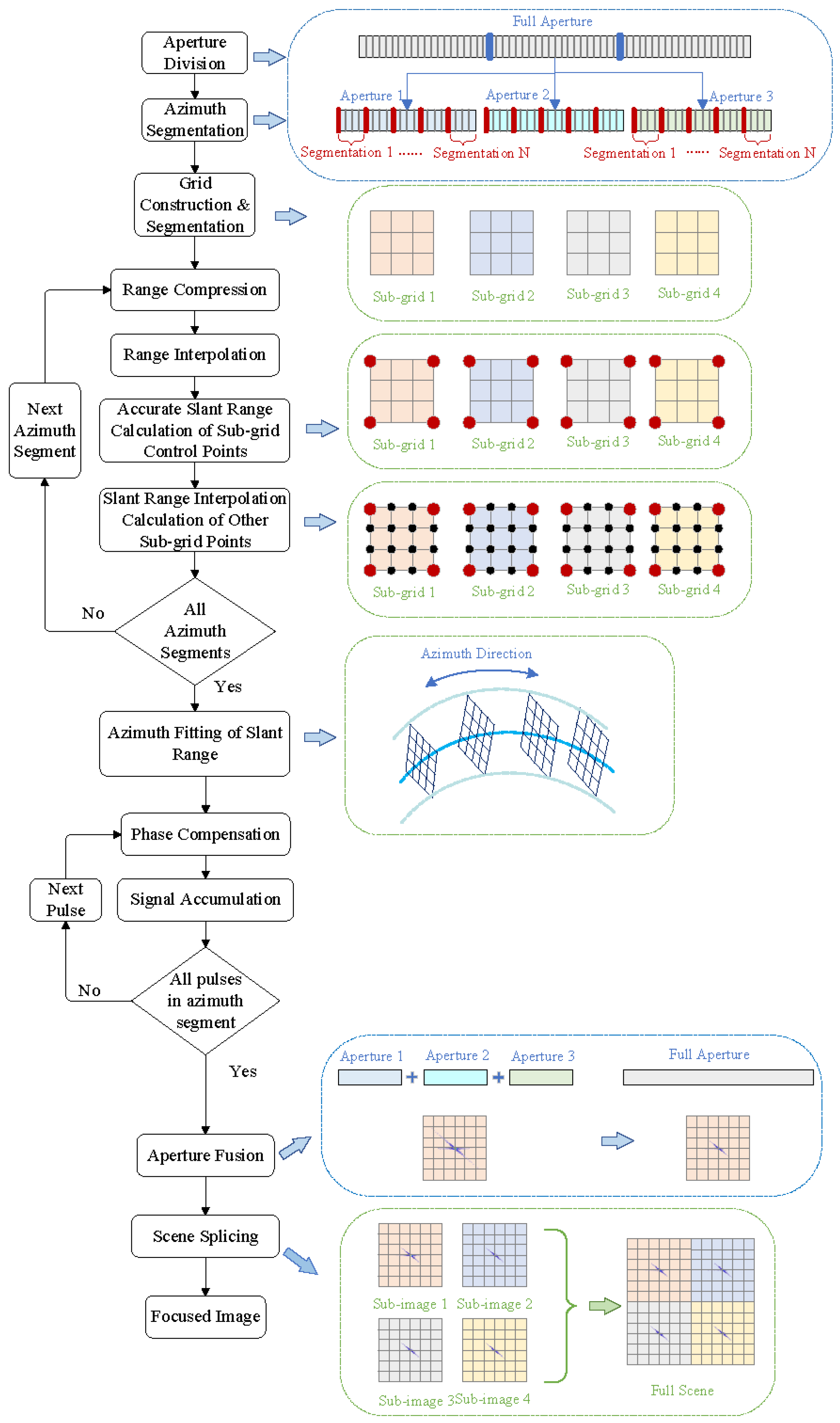
The GEO SAR staring mode adopts a segmented variable PRF technique. In the variable PRF SAR, the echo signal is non-uniform solely in the azimuth direction. By applying the BP algorithm to echo signals obtained with the variable PRF, data focusing is directly accomplished in the time domain. The BP algorithm can be regarded as a coherent pulse-by-pulse accumulation process of point targets in the scene along the azimuth direction in the time domain. This overcomes the requirement for uniform sampling in the azimuth direction, as necessitated by frequency-domain algorithms. However, the computational complexity of the BP algorithm scales proportionally to the product of the number of pixels within the imaging area and the number of azimuth sampling points in the echo. Consequently, the BP algorithm entails a significant computational burden. To tackle this issue, according to the variation pattern of the PRF, the subaperture decomposition technique is employed. The BP algorithm is applied within each subaperture to generate a coarse-resolution image, while coherent synthesis between subapertures is carried out to achieve a high resolution.
Table 5 presents the pulse repetition time (PRT), number of sustained pulses, and acquisition window width for each of the three subapertures.
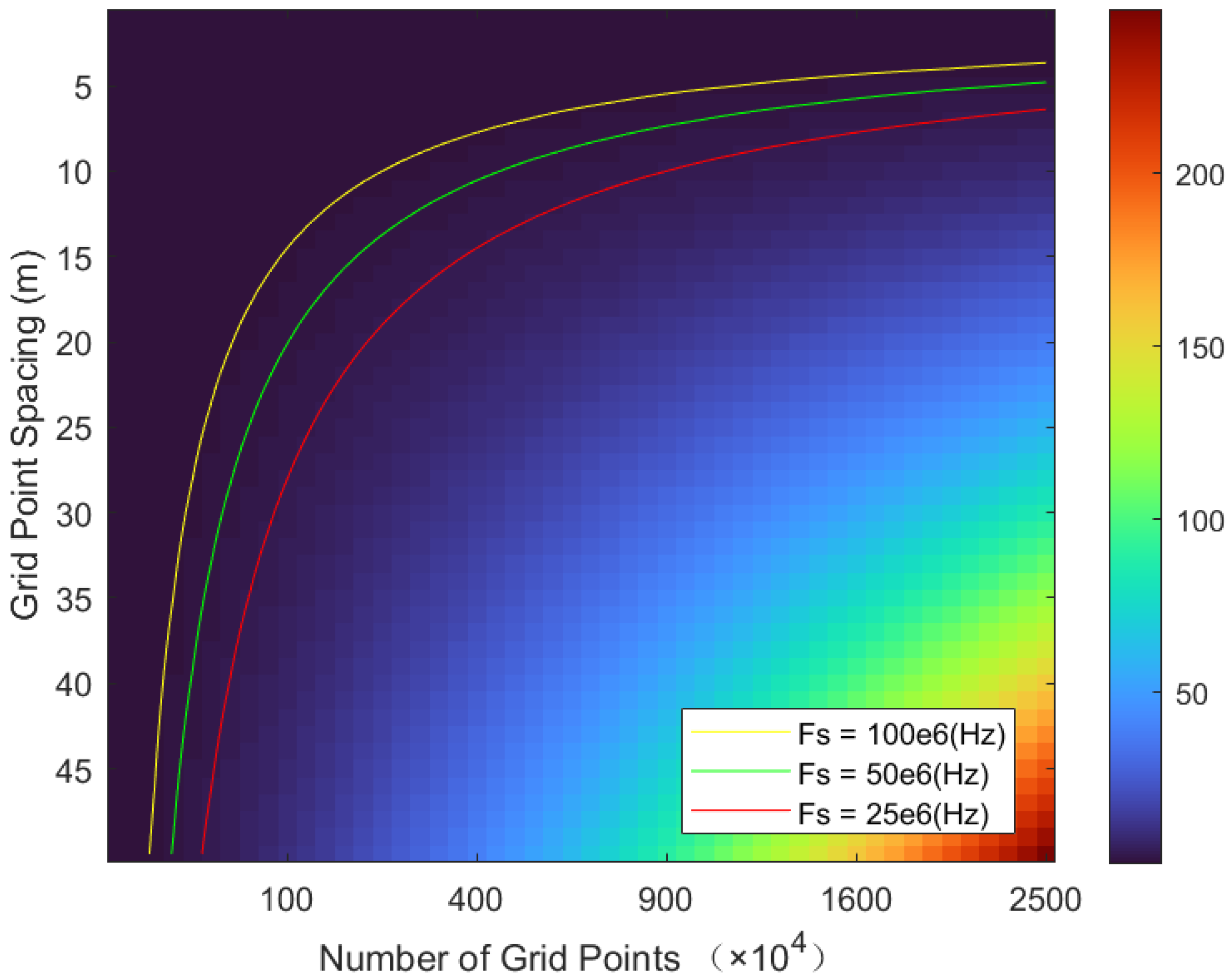
Subsequently, it is crucial to ascertain the suitable grid size and grid spacing. Excessive grid points or an enlarged grid spacing can amplify the error between the interpolated slant range and the precise slant range. As a consequence, the accuracy of the echo signals in the back-projection process is compromised, resulting in scattered point targets and the degradation of image quality. Conversely, an inadequate number of grid points or a reduced grid spacing may result in an excessive quantity of subgrids, consequently prolonging the processing time for subgrid imaging. Thus, it is crucial to opt for a larger grid size without compromising image quality. To guarantee image quality, it is necessary for the back-projection echo values to be accurate, which means that the range error at the grid points should be smaller than a range gate. This range error is primarily related to the range sampling rate expressed as Fs. Since the range errors at different grid points within the grid are not the same, the average range error of all grid points in the grid can be used to assess the range error for that particular grid.
Figure 11 illustrates the analysis of the average range error under different grid sizes and grid spacings. As more grid points are used and the grid spacing increases, the average range error of the grid increases, resulting in poorer image quality in the respective grid. Additionally,
Figure 11 depicts the range gate variation for different range sampling rates. The upper-left portion of the curve indicates that the grid range error is smaller than the range gate for that particular range sampling rate. In this case, the back-projection echo values at the grid points within that grid are accurate, ensuring that the grid’s image quality remains unaffected. Therefore,
Figure 11 can be used to select suitable grid sizes and spacing for constructing subgrids.
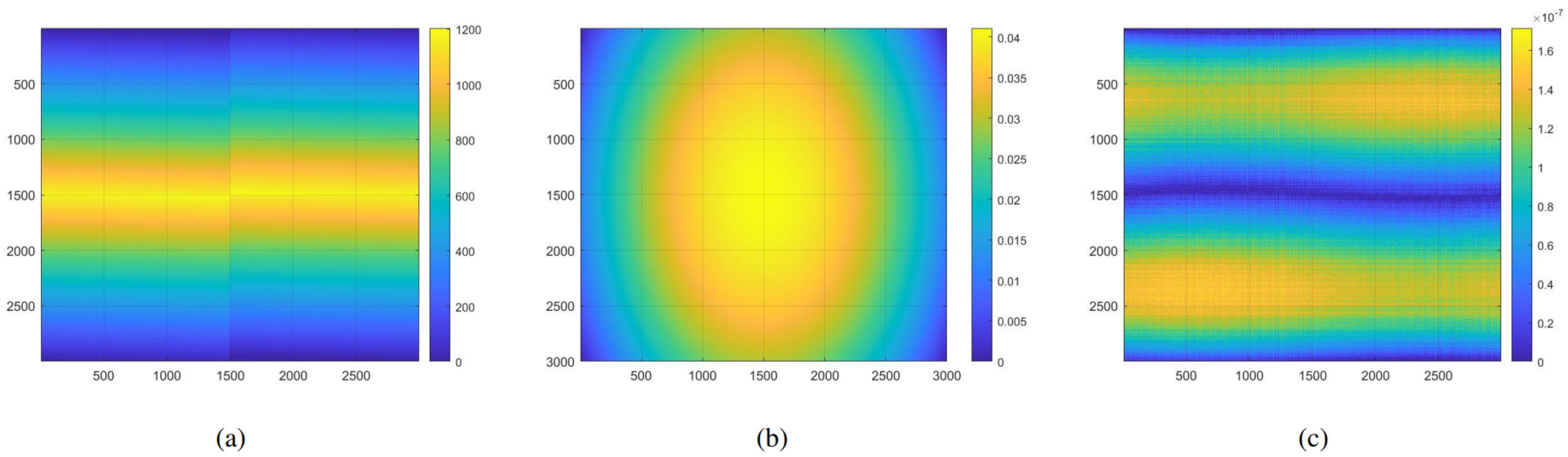
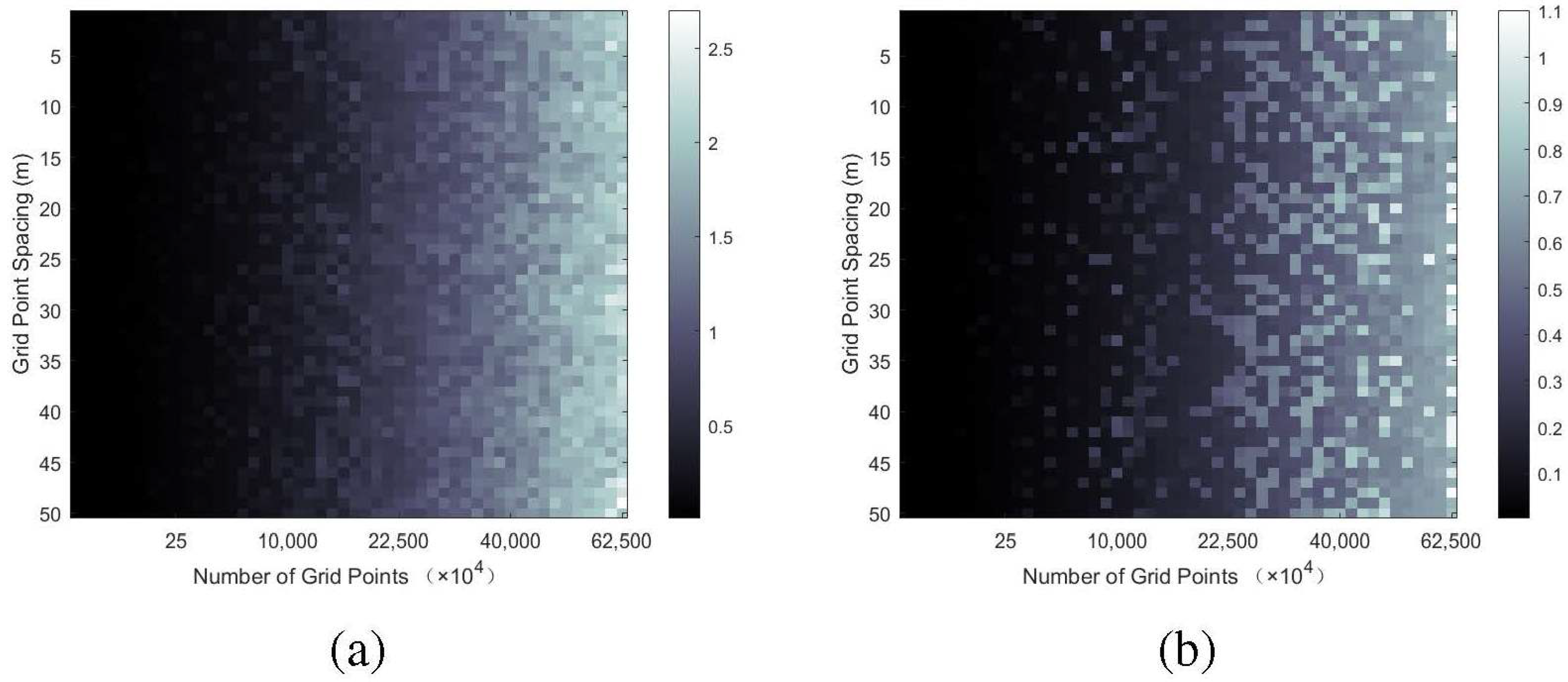
We also examined the factors affecting the slant range computation time.
Figure 12 showcases the time needed to compute the slant range for all grid points at a specific azimuth moment, considering different grid sizes and grid spacing values. The pixel values of the image are measured in seconds. In the graph on the left, the slant range is directly calculated, while in the graph on the right, the RRHCM is used. It can be observed that the slant range computation time is not affected by the grid size but instead depends on the number of grid points. As the number of grid points increases and the grid size becomes larger, more time is required to compute the slant range values.
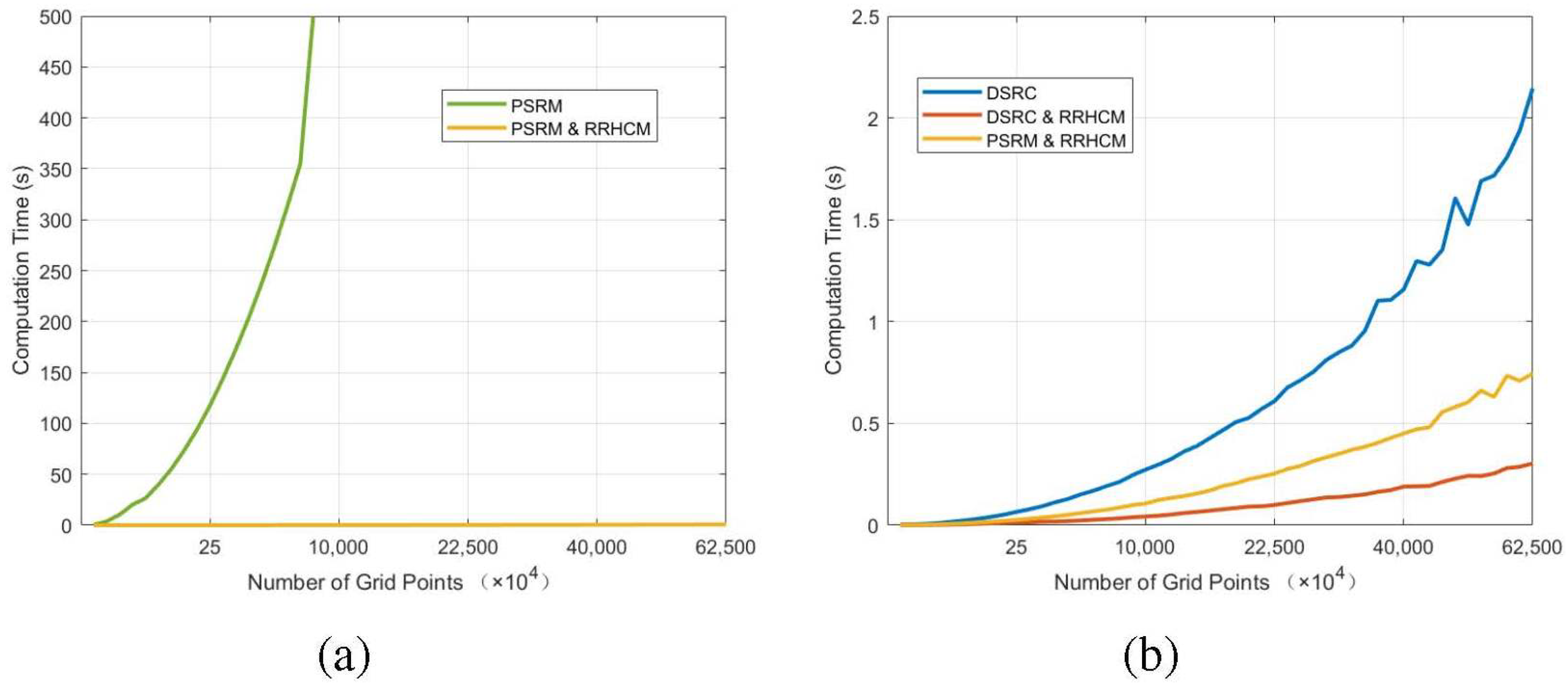
With a constant grid spacing of 4 m, we compared the time required by four different slant range methods for varying numbers of grid points, as shown in
Figure 13. The DSRC method represents the direct calculation of slant range, PSRM represents the Precise Slant Range Model, DSRC & RRHCM represents direct slant range calculation for control points using the Rapid Range History Construction Method, and PSRM & RRHCM represents the use of the Precise Slant Range Model for control points with the Rapid Range History Construction Method applied for the rest of the grid points. As shown in the graph on the left, there was a significant increase in the time needed for PSRM to compute the grid slant range. However, using the Rapid Range History Construction Method could reduce the computation time. When compared to PSRM, the time required for PSRM & RRHCM remained nearly constant. In the graph on the right, DSRC & RRHCM exhibits a slower increase rate compared to DSRC, indicating that the Rapid Range History Construction Method also reduced the time needed for direct slant range calculation. PSRM & RRHCM required nearly half the computation time of DSRC but a slightly longer computation time than DSRC & RRHCM. In conclusion, the Rapid Range History Construction Method could effectively reduce the computation time for slant range calculation, decrease the computational workload, and consequently shorten the processing time for imaging, thereby enhancing the imaging timeliness.
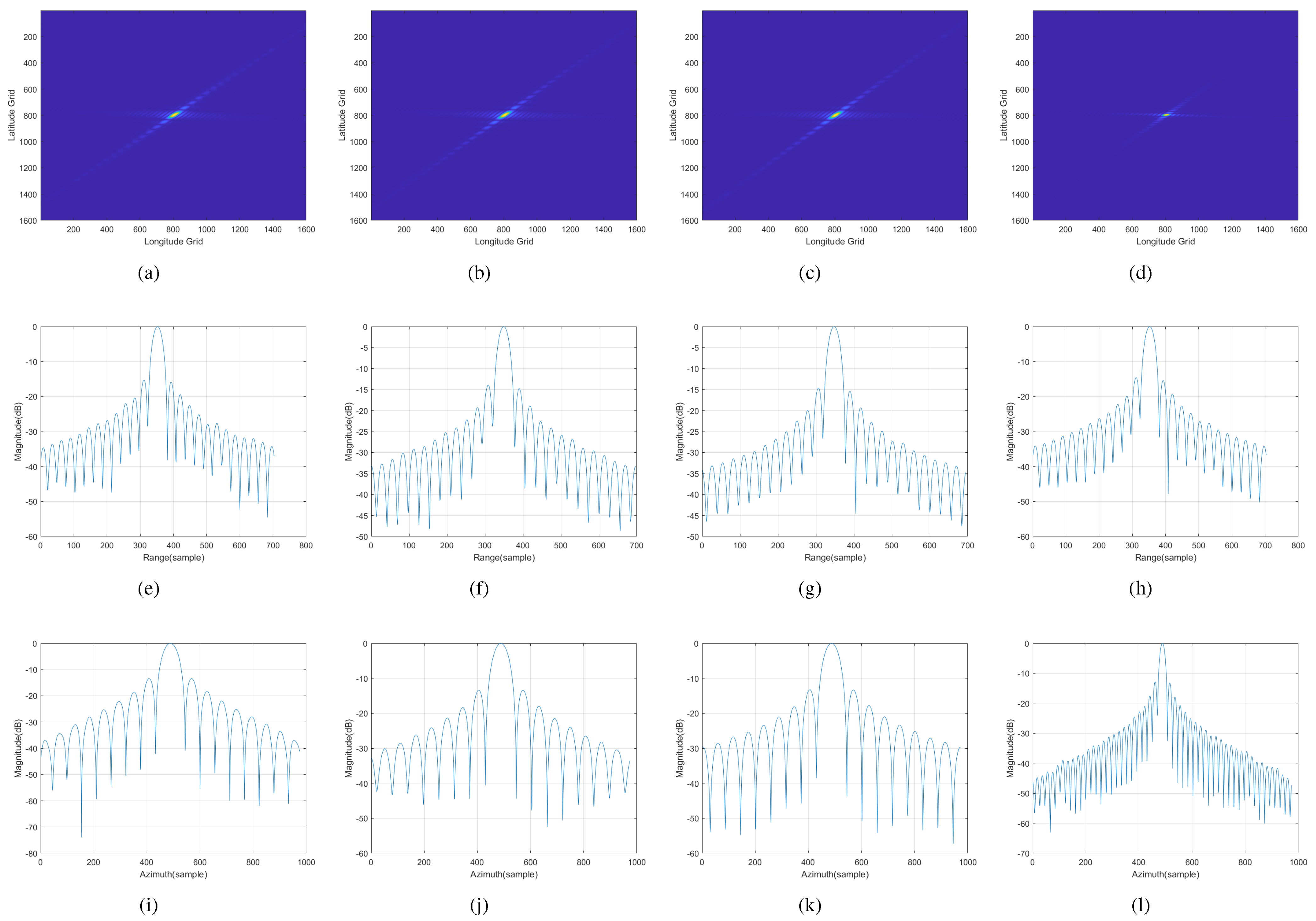
Next, we analyzed the imaging quality of the AEBP algorithm using the Precise Slant Range Model and the Rapid Range History Construction Method. The grid was
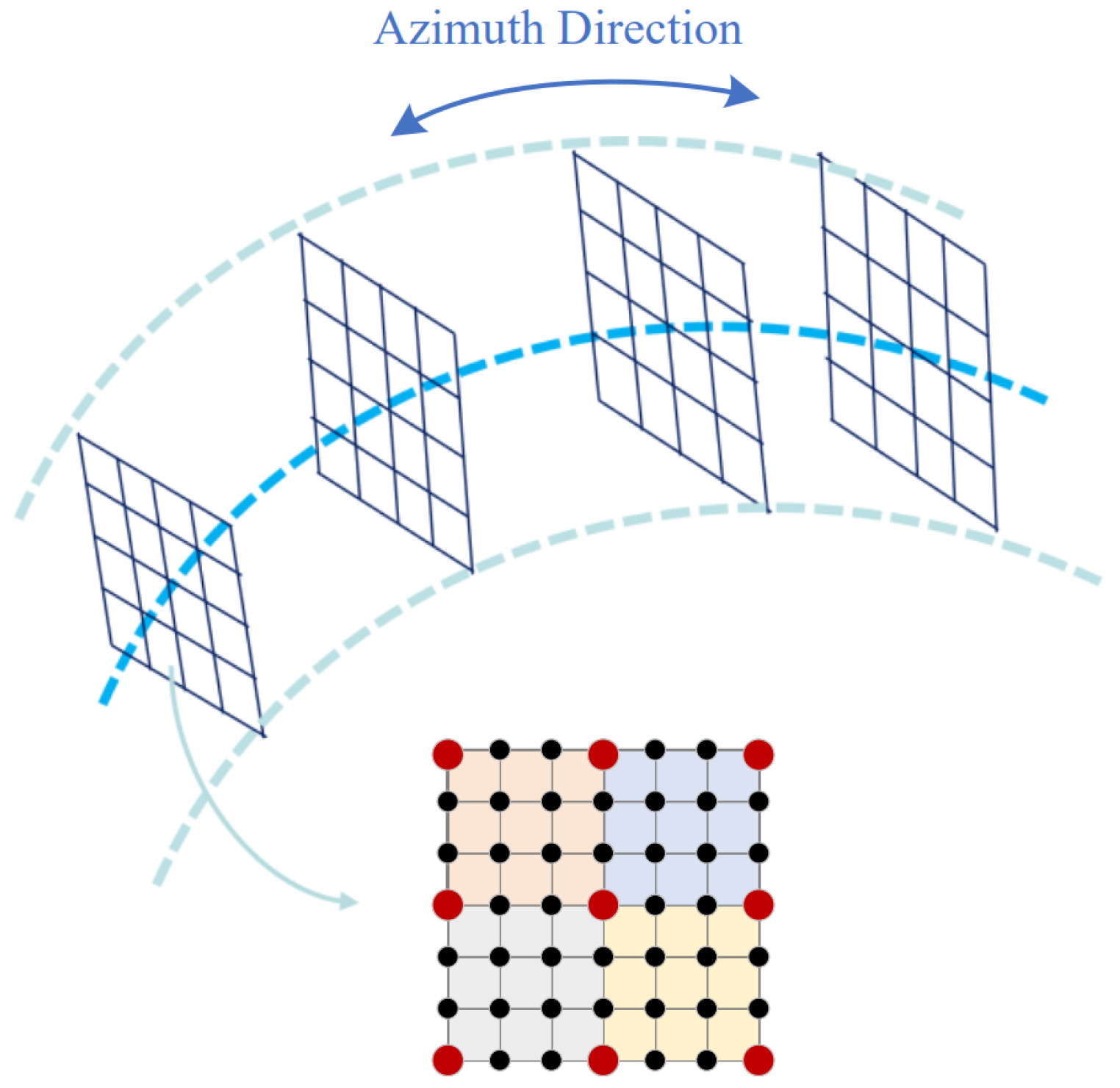
with a spacing of 4 m. The point target was positioned at the center of the grid. Imaging was conducted separately for three subapertures. The slant range for the control points of the grid was calculated using the Precise Slant Range Model, while the slant range for the remaining grid points was interpolated using the RRCHM. The imaging results for the three subapertures and their fusion are illustrated in
Figure 14. The first row shows the focused image of the point target, while the second and third rows display the range direction envelope and azimuth direction envelope, respectively. The quality analysis of the point target imaging and the reduced time (RT) for imaging are summarized in
Table 6. The peak sidelobe ratio (PSR) and integrated sidelobe ratio (ISR) (normalized to the theoretical value) were −13.26 dB and −9.68 dB, respectively. The RT value was obtained by comparing the time taken to shorten the experiment with the time taken to directly calculate the subaperture grid point slant range. A higher RT indicates that the AEBP algorithm could save more time. PSRM represents the focal results of point targets obtained by calculating the slant ranges of all grid points in the azimuth direction using the Precise Slant Range Model. Conversely, PSRM & RRHCM represents the focal results of point targets obtained using the Precise Slant Range Model and the Rapid Range History Construction Method. It is evident that the imaging results obtained using the Precise Slant Range Model exhibited excellent imaging performance. The parallel processing of subapertures significantly reduced the imaging time, while the coherent fusion of subapertures enhanced the azimuth resolution. The RRCHM further improved the computational efficiency. The proposed algorithm ensured high imaging quality and enhanced the timeliness of imaging processing. It could also be combined with the aperture segmentation approach.
The fusion of three subapertures improved the azimuth resolution, resulting in a high-precision image, as shown in
Figure 14.
Table 6 presents an analysis of the image quality. PSRM represents the focal results of point targets obtained by calculating the slant ranges of all grid points in the azimuth direction using the Precise Slant Range Model. PSRM & RRHCM represents the focal results of point targets obtained using both the Precise Slant Range Model and the Rapid Range History Construction Method. The imaging results obtained using the Precise Slant Range Model demonstrated excellent imaging performance. The parallel processing of subapertures reduced the imaging time, while the coherent fusion of subapertures enhanced the azimuth resolution. Furthermore, the RRCHM improved the computational efficiency, ensuring high-quality imaging and timely processing.
6.4. Performance Evaluation
The proposed AEBP algorithm, when combined with the Precise Slant Range Model (PSRM), exhibited enhanced imaging quality compared to traditional BP algorithms. PSRM provides a more accurate estimation of slant range, which contributes to improved imaging quality. By incorporating the velocity and acceleration of both the satellite and target, PSRM ensures that slant range values are computed with higher precision. Utilizing the precise slant range values provided by PSRM, the AEBP algorithm can more effectively focus the radar signals, resulting in sharper and more detailed images.
Additionally, the Rapid Range History Construction Method (RRHCM) significantly improves the imaging speed of the AEBP algorithm. RRHCM offers a more expedient approach to computing slant range. Although it may introduce some trade-offs in terms of precision compared to PSRM, it still produces satisfactory imaging quality. By significantly reducing the computation time for non-control grid points, the fast calculation method enables faster image generation without compromising the overall quality. Additionally, RRHCM is not limited by the type of coordinate system used. The introduction of previous methods and experimental validation were conducted in the Cartesian coordinate system. However, for the polar coordinate system, it was shown that the RRHCM still exhibited promising performance, as demonstrated in
Table 7.
represents the time reduction for constructing the grid range history, while
represents the reduced time for the back-projection operation.
The combination of the PSRM and RRCHM enables enhanced timeliness and efficiency in generating high-quality radar images. The algorithm effectively handles large datasets and complex scenes, making it suitable for real-time applications and scenarios that require rapid image processing.
In summary, the Accurate and Efficient Back-Projection (AEBP) algorithm, based on the Precise Slant Range Model (PSRM) and the Rapid Range History Construction Method (RRHCM), provides superior imaging quality and speed compared to traditional BP algorithms and fast BP algorithms. The accuracy of the slant range model contributes to sharper images, while the fast calculation method ensures efficient processing without sacrificing quality. This combination makes the algorithm well-suited for real-time imaging tasks that demand both accuracy and speed. The proposed AEBP algorithm optimizes each back-projection operation and the construction of the grid range history, independent of the coordinate system used. It does not affect the performance of subaperture fusion and exhibits strong universality. Consequently, the AEBP algorithm can be integrated with existing fast BP algorithms to reduce the speed of back-projection during the fast BP imaging process, thereby further enhancing the imaging speed of fast BP.
The current implementation of the proposed method is limited to uniform imaging grids. These limitations restrict the division of imaging grids. However, due to grid approximation, there may be errors in the calculated slant ranges. The proposed method does not incorporate range error compensation. Thus, the influence of range error can only be managed by selecting a smaller grid size for imaging. Subsequently, we will further refine the Rapid Range History Construction Method to enable its applicability to non-uniform imaging grids. Additionally, we will investigate a compensation method to correct the slant range error. Moreover, the validation was limited to simulation targets. Subsequently, we will also apply the proposed method to real data for further evaluation.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}