4.1. Simulation Analysis of GLI and Registration Error
Different from traditional algorithms that use image features for registration, the core influencing factor of the GLI registration algorithm is the positioning accuracy of the points to be registered in the image, signifying the positioning error directly affects the subsequent registration results. Therefore, the positioning errors of different images should be considered before simulation analysis. The spatial distance can be used to evaluate the positioning accuracy corresponding to the position of a single pixel. If the standard reference coordinate of the point to be registered is
and the positioning result is
, the positioning error is:
In simulation analysis, the Monte Carlo method is an appropriate algorithm to analyze a large amount of data. The simulation error analysis model based on the Monte Carlo method is defined as follows:
where
y represents the single positioning result,
is the single positioning error, and
expresses the random variable of measurement error, which follows the normal distribution. The error model can be described as Equation (29)
where
indicates the pseudorandom number obeying the standard normal distribution, and
illustrates the standard deviation of the measurement of the corresponding parameter term.
Another key index to evaluate the positioning accuracy in multiple simulation analyses is the circle probability error (cep), which is shown in Equation (30)
Based on the simulation model and evaluation index above, the positioning errors of aerial remote sensing images and satellite remote sensing images are analyzed by typical values. Specific reference values are displayed in
Table 1 and
Table 2.
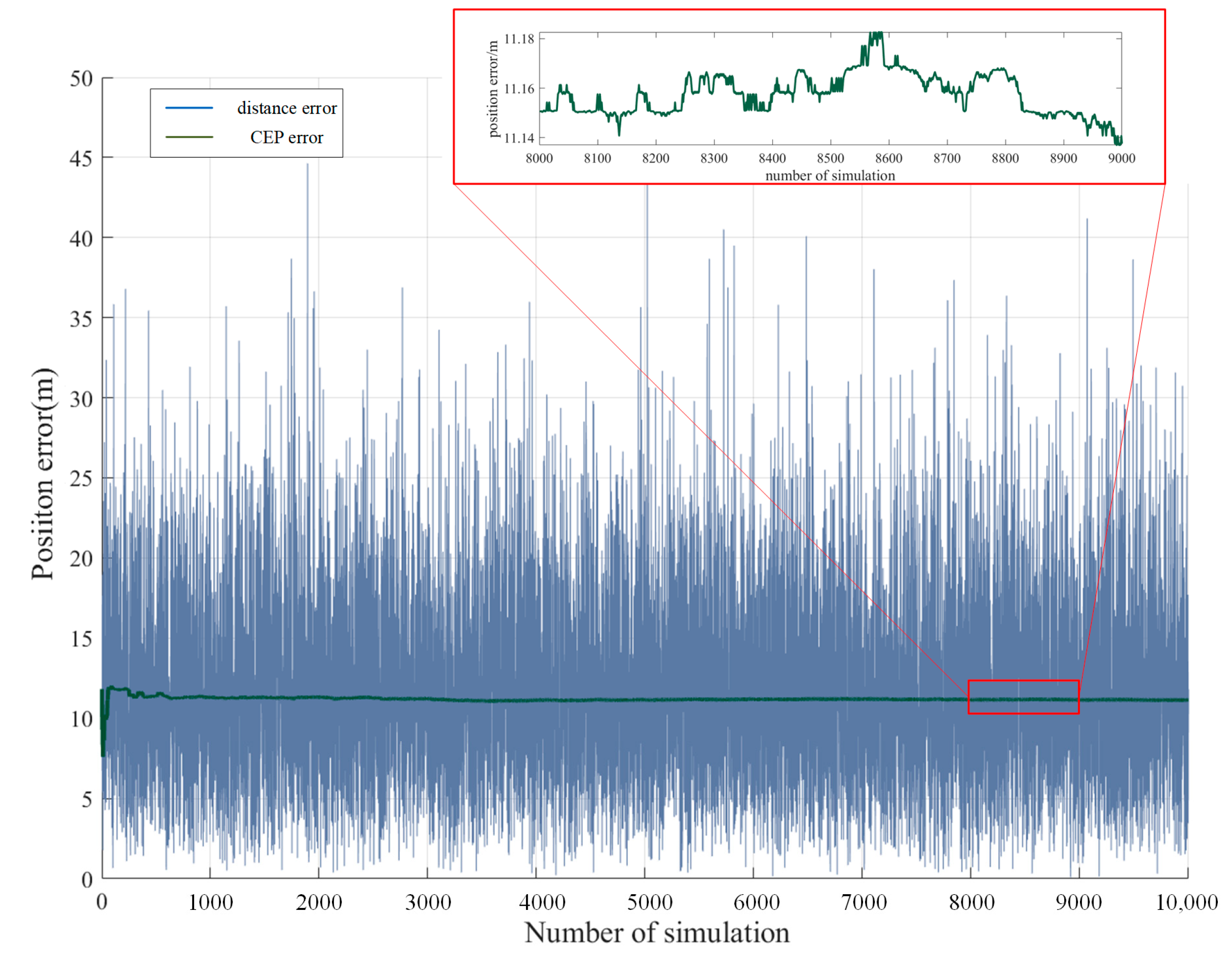
The ground in the simulation area is flat, so the positioning error caused by terrain fluctuation is temporarily not considered. During the simulation, the area with the center (31.20°N, 121.48°E) is photographed to obtain images by the UAV with a 2500 flight height. As shown in
Figure 7, due to random error, the distance error simulation results in a single target location varying greatly, while the CEP gradually becomes stable when the simulation times exceed 1000, which can predict the positioning accuracy in the actual situation. Under the simulation conditions in
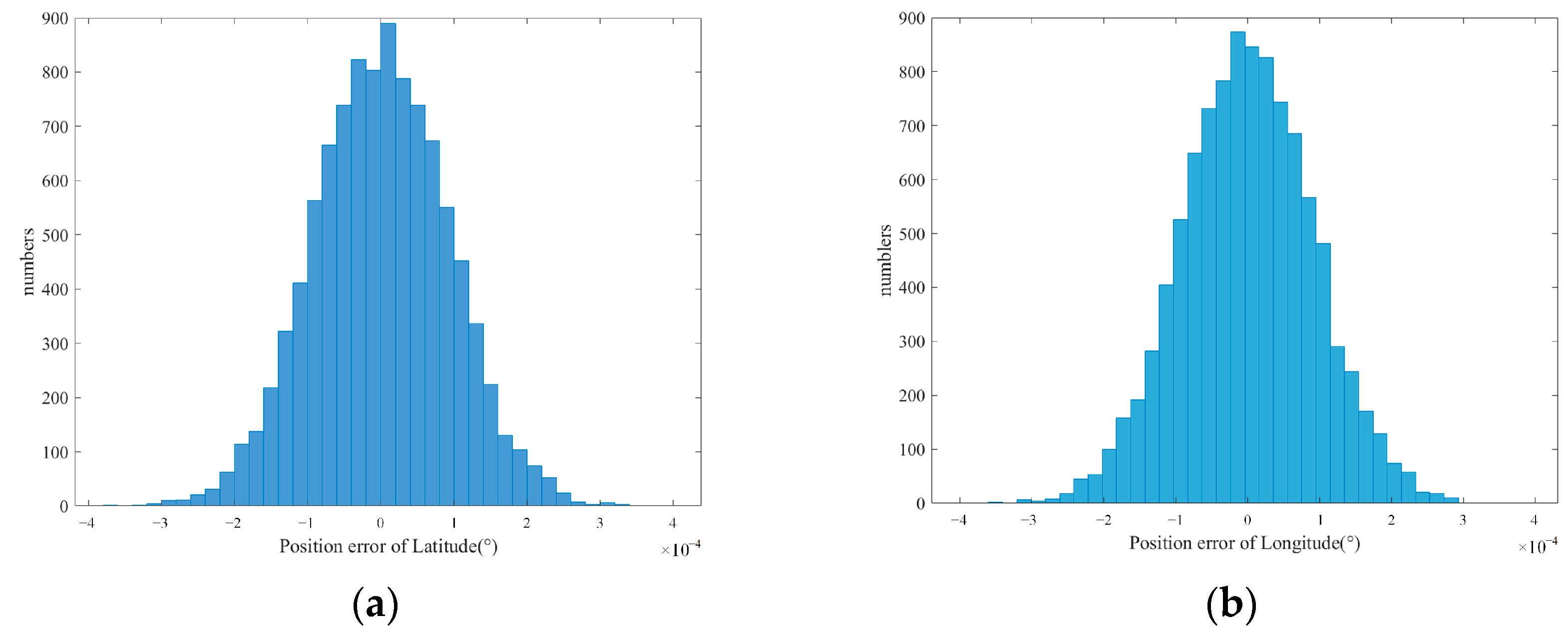
Table 1, the CEP is stable at around 11.15m, the projection position of the point to be registered in the image is a two-dimensional coordinate, and the pixel error during registration is also a two-dimensional parameter; therefore, considering their longitude and latitude errors separately is feasiable, and the registration error can be analyzed in combination with the longitude and latitude resolution of a single pixel. The longitude and latitude error probability distribution of aerial remote sensing images is shown in
Figure 8.
The standard deviation of longitude and latitude of the simulation results can be calculated from the target reference position
and the positioning simulation result
, as shown in Equation (31).
Through calculation, the latitude standard deviation and longitude standard deviation are and , respectively. In addition, the pixel registration standard deviation of the point to be registered can be obtained by combining the longitude and latitude resolution calculated by Equation (21).
Similar to the calculation approach to data in
Table 1, this paper simulated and analyzed the positioning accuracy of satellite remote sensing images through the data in
Table 2.
Figure 9 and
Figure 10 illustrate the positioning error results.
Under the simulation parameters in
Table 2, the latitude standard deviation of pixel positioning error
is
, and the longitude standard deviation
is
. Through analysis, it can be found that the CEP of satellite simulation positioning is 81.12 m, which is significantly higher than the simulation results of aerial remote sensing images. This is because a high earth orbit satellite is used to image the ground in the simulation process, which is more affected by various random errors such as attitude control, orbit measurement and position measurement than that of the low earth orbit satellite and UAVs. However, the positioning error does not mean that the registration accuracy will be reduced, since the specific pixel registration accuracy is limited by the pixel resolution, and the image resolution of the high earth orbit satellite is lower than that of the low-altitude UAV.
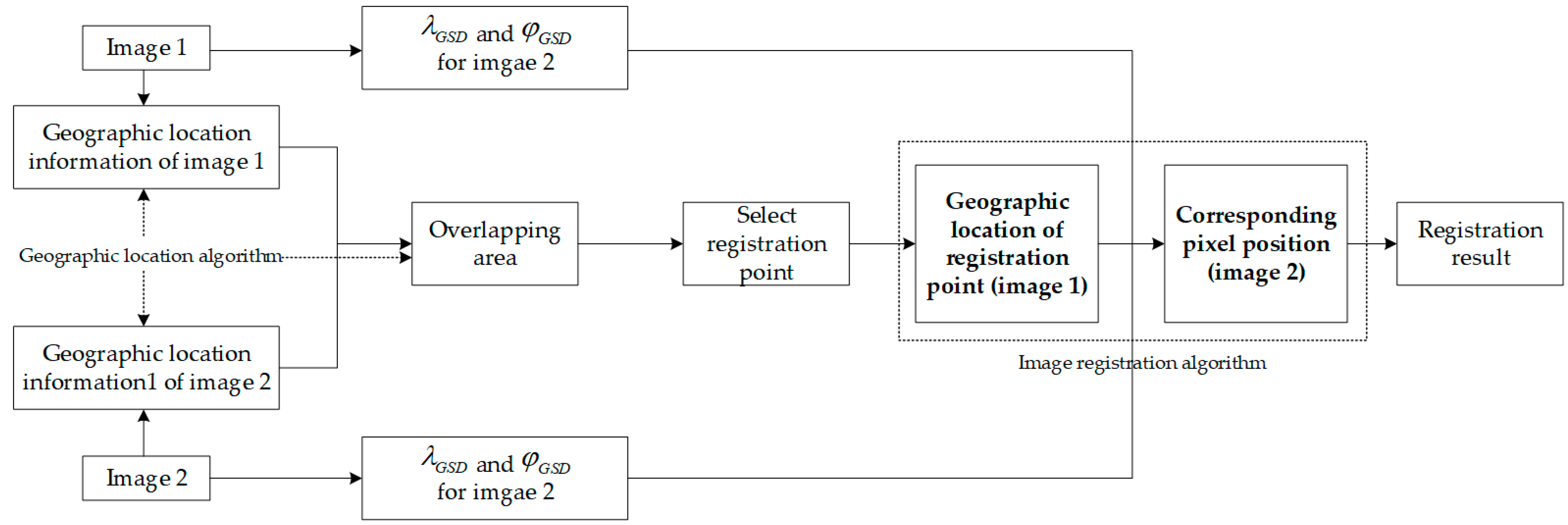
To verify the validity of this algorithm, the image registration process is simulated and analyzed through the simulation environment. Assuming that the area to be registered is within the range of
,
Table 3 shows the geographic location information of the points selected for registration in the simulation. In the simulation process, the algorithms provided in
Section 2 and
Section 3 are used to calculate the geographic location and perform image registration. The simulation parameters are as follows: the pixel size of the UAV camera is 10 microns and the camera focal length is 0.06m. The camera CCD detector size is 2000 × 2000, and the carrier flight height is 3000 m. Under this simulation condition, the standard deviation of longitude positioning
is
, and the standard deviation of latitude positioning
is
.
The image to be registered is the satellite remote sensing image of the same area, the number of detector pixels is 4000 × 4000, the longitude positioning standard deviation
is
, and the latitude positioning standard deviation
is
. The distribution of pixel position calculation results of multiple simulation registration points is shown in
Figure 11.
To display the simulation results more clearly and intuitively, the positioning error, projection error and registration point error are specifically analyzed, as shown in
Table 4.
The projection error in the table refers to the pixel deviation distance between the projection position obtained by the coordinate transformation of the point to be registered and the actual projection position. However, due to random errors, the deviation directions of the points to be registered in the two images are not consistent. Therefore, the deviation between the actual projection position and the ideal projection position of the points to be registered should be considered; that is, the relative projection error of the points between the two images, which is recorded as the registration point error in the table. The ground registration accuracy can be calculated based on the ground resolution of the satellite image pixel of 0.5 m.
In the simulation experiment, all the data in
Figure 11 are analyzed. The average projection errors of the three registration points on the two images are 34.53 pixels and 37.98 pixels, respectively. The average error of the relative registration points between the two images is 12.64 pixels, and the registration accuracy of the corresponding ground registration points is better than 6.5 m. This confirms that the algorithm can achieve image registration for the same area.
4.2. Registration Experiment of UAV Remote Sensing Image and Satellite Remote Sensing Image
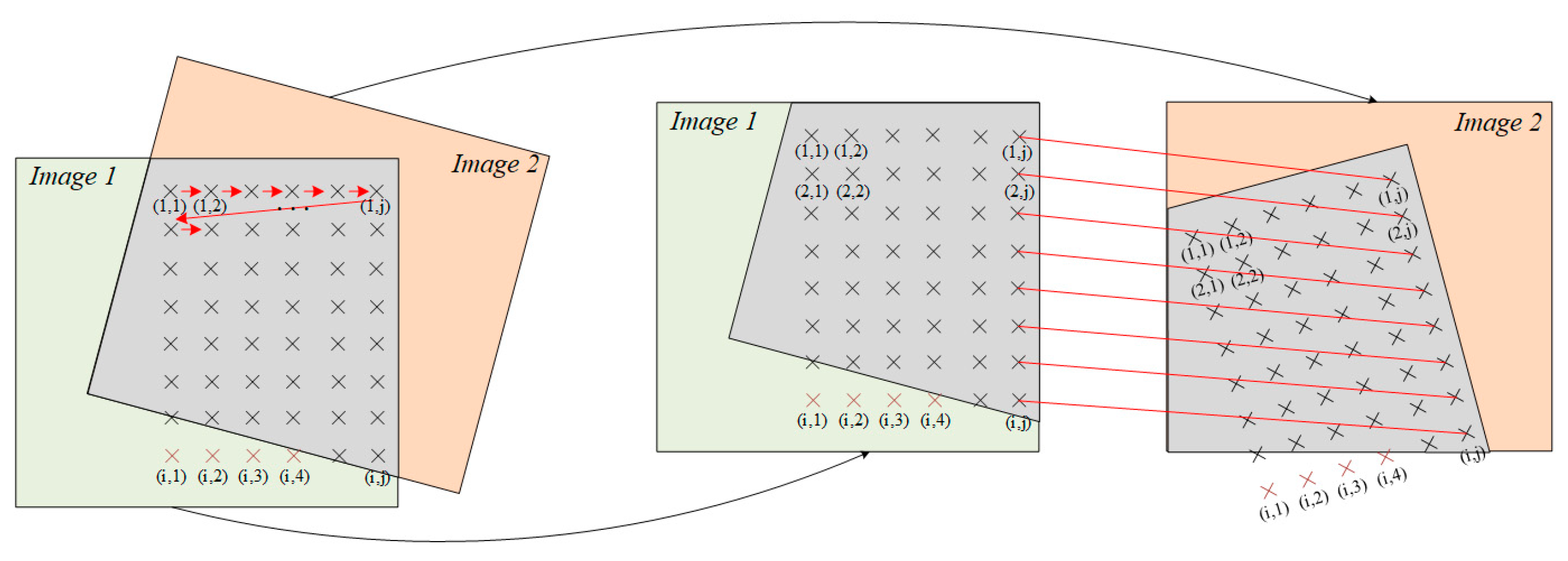
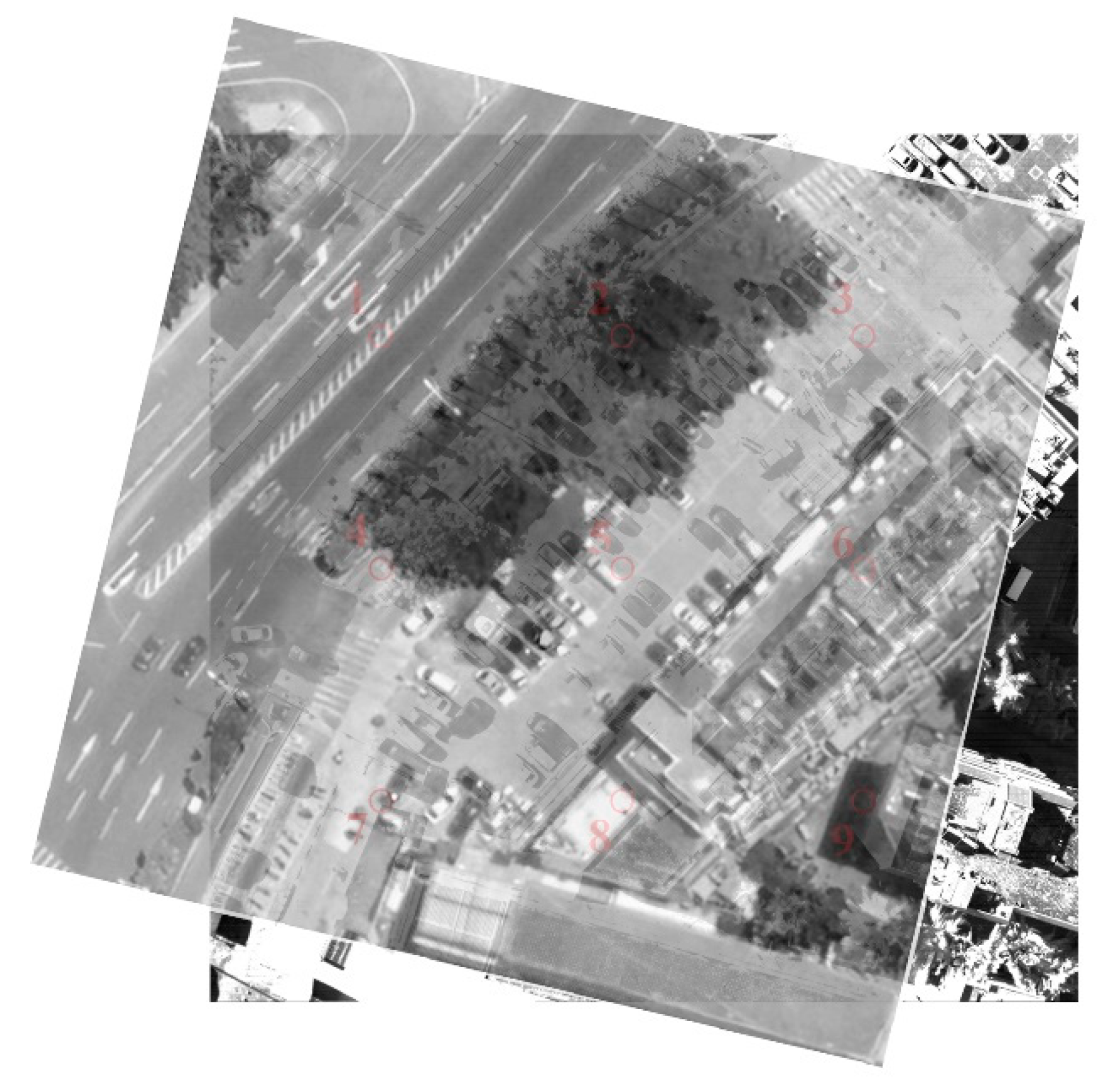
To verify the effectiveness of the geographic-information-based registration algorithm in the case of heterogeneous image registration, an aerial remote sensing image and satellite remote sensing image in the same area were randomly selected for registration experiments. However, the imaging angles and imaging time between the two images are different, and the coverage area is not completely consistent. The two images were obtained by high-resolution remote sensing satellites and ground remote sensing image obtained by UAVs, respectively. The resolution of the satellite remote sensing images is 0.15 m, and the ground resolution of UAV remote sensing images is 0.6 m. To better reflect the selection of registration points and the registration effect, the images are scaled in the schematic diagram to a uniform resolution.
First, two images were registered using the algorithm proposed in this paper. Nine groups of registration points were selected in the images, and the two images were registered by the algorithm proposed in
Section 2 and
Section 3. The corresponding positioning results and registration errors are recorded in
Table 5. The geographic location information in the table was calculated according to the satellite remote sensing images to be registered. The projection position (UAV) is the ideal projection position of the point to be registered in the UAV remote sensing image calculated by the above algorithm. The registration error refers to the pixel deviation between the ideal position and the actual projection position. The registration accuracy can be represented by the spatial distance between the pixel position calculated by the algorithm and the standard position of the point to be registered.
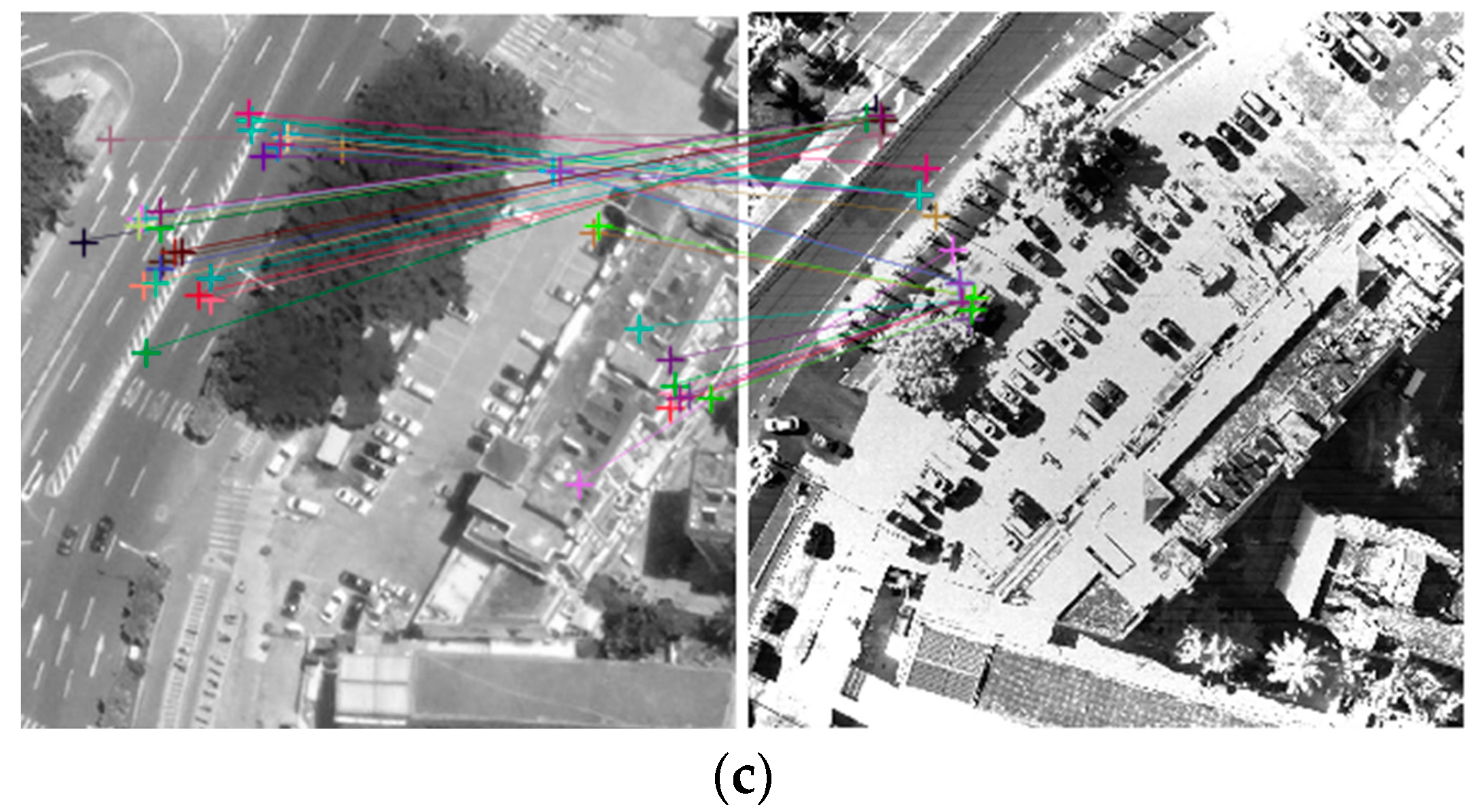
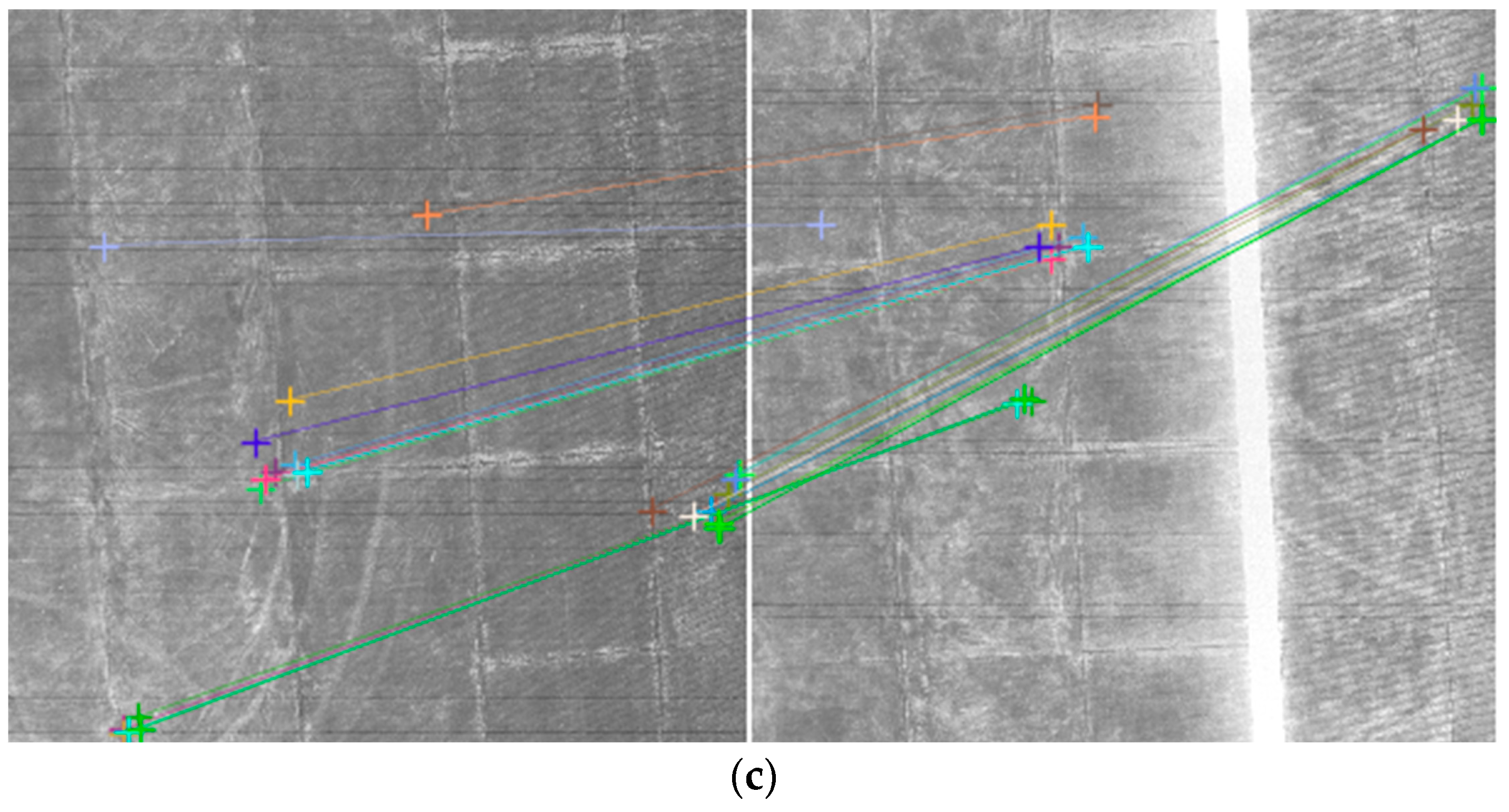
The experimental results show that GLI algorithm can register two images, the accuracy of ground registration reaches 12.55 m, and the exact correspondence between the two images can be obtained. Moreover, to verify the advantages of this algorithm in the case of heterologous image registration, SIFT-algorithm- and neural-network-based registration algorithms were used to register the two images in the experiment, and the results were compared with the GLI algorithm, as shown in
Figure 12. The number in
Figure 12a represents the selection order of registration points in the GLI algorithm, and the cross symbol in
Figure 12c represents the position of feature points extracted by CNN.
To display the registration results more clearly, the experimental data were analyzed through the parameters of the number of registration points, the number of correctly matched pixels, and the average registration pixel error, as shown in
Table 6. In the experiment, the SIFT algorithm obtained three groups of registration points, but all of them belonged to the wrong registration and the average registration error was 751.35 pixels. Many registration points were obtained by the neural network, of which only four groups were close to the correct registration and belonged to the same feature area, and the overall average registration error was 381.25 pixels. Neither method can give the corresponding relationship between the two images because there are too many misregistration points. The reason for this is that the two algorithms are based on image features, while the image to be registered has huge differences due to inconsistent shooting angles, changes in road signs, and changes in parking lot location and the number of vehicles. The number of wrong registrations is far greater than that of correct registrations. Therefore, the two algorithms cannot achieve image registration. Correspondingly, the GLI algorithm achieves image registration using the geographic location of nine sets of registration points, without considering image characteristics. Due to the positioning error, the average pixel error between the points to be registered was approximate 20.92 pixels. To verify the effectiveness of this algorithm, the registration errors of the image centers were also analyzed in
Table 6. The data given in the table are the results of the calculation after the significant error registration points were manually removed. Since there are no correct registration points, SIFT cannot obtain registration results, and the average registration error of the neural network is 102.35 pixels.
The results show that the registration accuracy of the GLI algorithm is significantly better than that of the other two algorithms. When the feature-based registration algorithm struggles, the GLI algorithm can effectively register heterogeneous images with large differences. The final image registration result of this algorithm is shown in
Figure 13.
4.3. Experiment with Image Registration without Feature Points
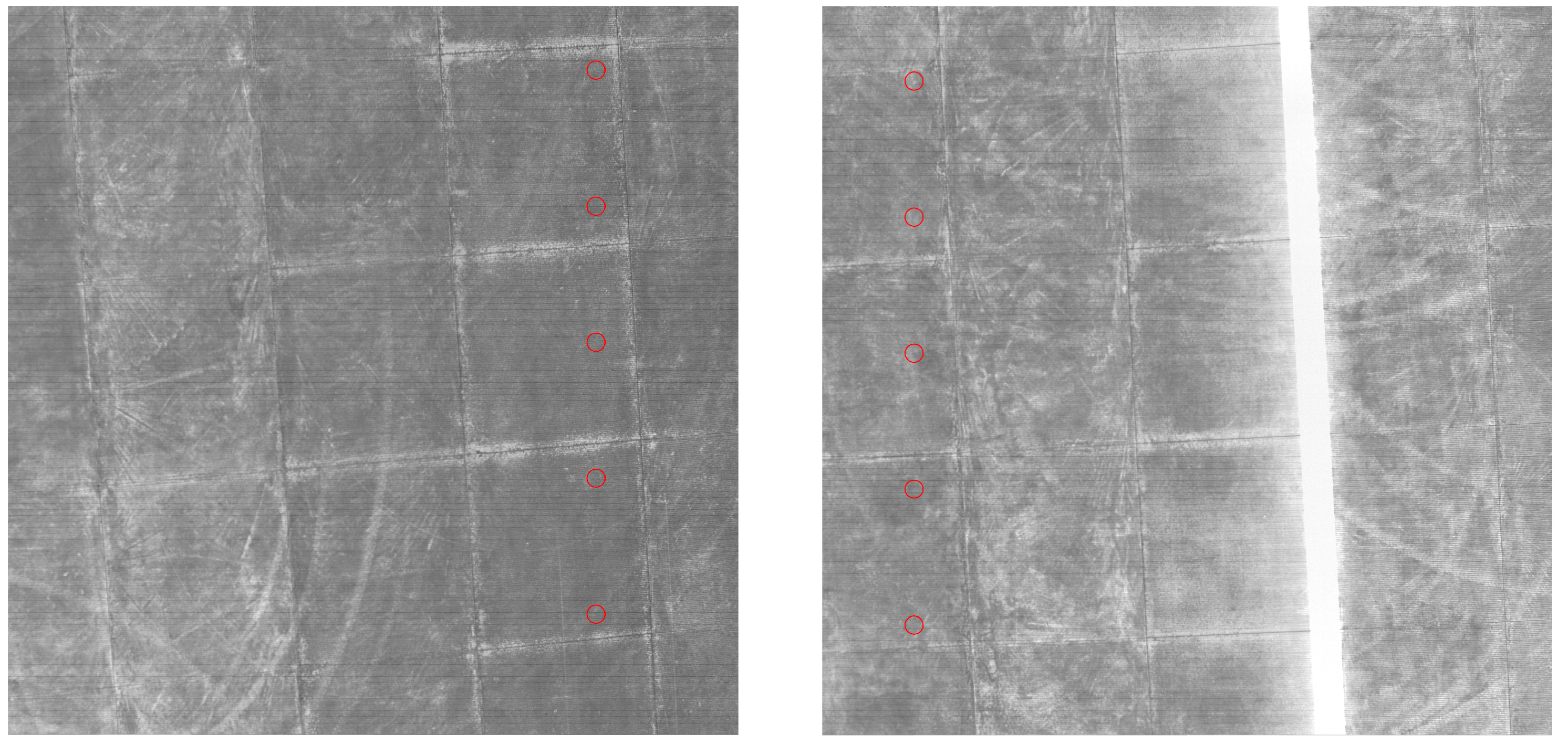
In the case where there are no obvious feature points, such as forest, farmland and sea level, the traditional registration algorithms cannot perform very well. Neither the SIFT algorithm nor the neural network model can find accurate matching feature points. In this paper, the registration ability of the GLI algorithm in the case of no feature points is verified by two consecutive farmland images taken by UAV.
Figure 14 shows two random remote sensing images of continuous farmland in the test area, with a certain area of overlap. After determining the overlapping area by calculating the geographic location corresponding to the pixel, five registration points are uniformly selected in the figure for the registration experiment and marked with a red circle, and the calculation results are shown in
Table 7.
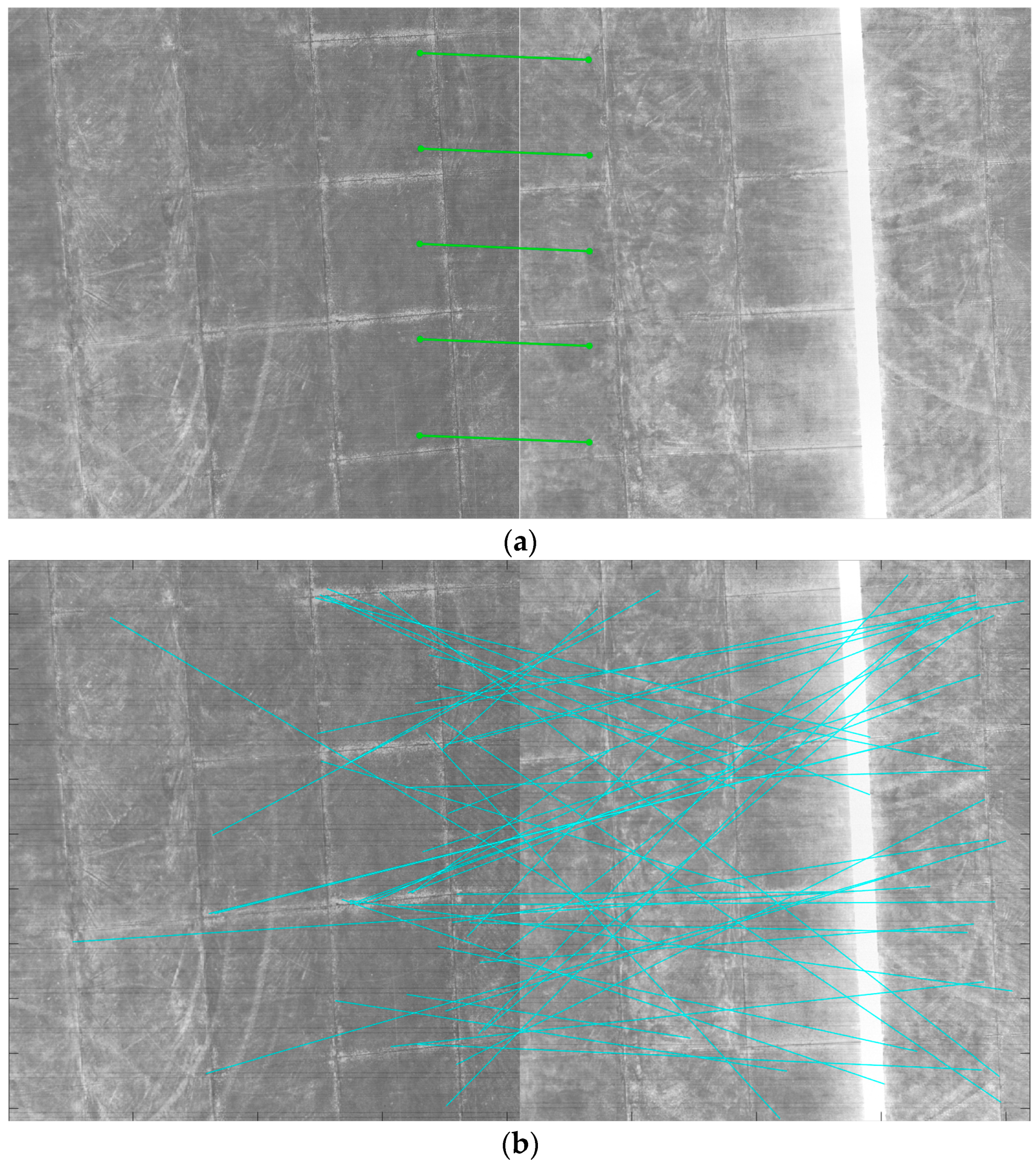
Figure 15 illustrates the registration results of the GLI algorithm, SIFT and CNN registration algorithm. As shown in the figure, since there are no typical feature points in the image, the algorithm based on feature extraction struggles to register two images. Both the SIFT algorithm and the neural network model extract the wrong registration points.
Similar to the experiment conducted in
Section 4.2, the research in this section also takes registration points and registration accuracy as analysis criteria for experiment results. Since there are no typical features, such as geometric shape, in the farmland area, the registration results generated by SIFT algorithm are confusing and only one pair of registration points belongs to the same area of two images; however, this pair of registration points’ accuracy also reaches 245.62 pixels and the average registration error is 362.96 pixels. The neural network model partially recognized similar texture features but the extracted registration points do not belong to the same region. Therefore, the corresponding relationship between the two images cannot be derived. It should be noted that the average registration error does not reflect the real registration results because most of the registration points have the wrong registration and exceed the overlap region of the images. These registration errors, which have various directions in the coordinate system, mean that the comparison of average registration errors does not make much sense. Under this circumstance, the distribution of the quantity of correct and incorrect registrations ought to be more focused. As indicated in
Table 8, the registration accuracy for SIFT is 2.17%, while the proportion is 0% for CNN-extracted feature point registration results. This phenomenon is caused by the uniform distribution of remote image texture, making the features of images from different regions very similar. This is also one of the reasons why the imaging registration algorithm based on feature points is difficult to apply to this kind of remote image.
For the GLI algorithm, the five groups of registration points obtained based on their geographical location information all have the correct registration, since the two images were continuously obtained by the same camera within a short time, and their positioning errors are also close. Therefore, the registration accuracy is only affected by the random measurement error during shooting. In this experiment, the pixel registration error is close to 7.2 pixels and the corresponding ground registration accuracy reaches 4.32 m, which can better achieve image registration without feature points.

 ,
, 

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}