
Orbital Uncertainty Propagation Based on Adaptive Gaussian Mixture Model under Generalized Equinoctial Orbital Elements
 ,
,
Abstract
:1. Introduction
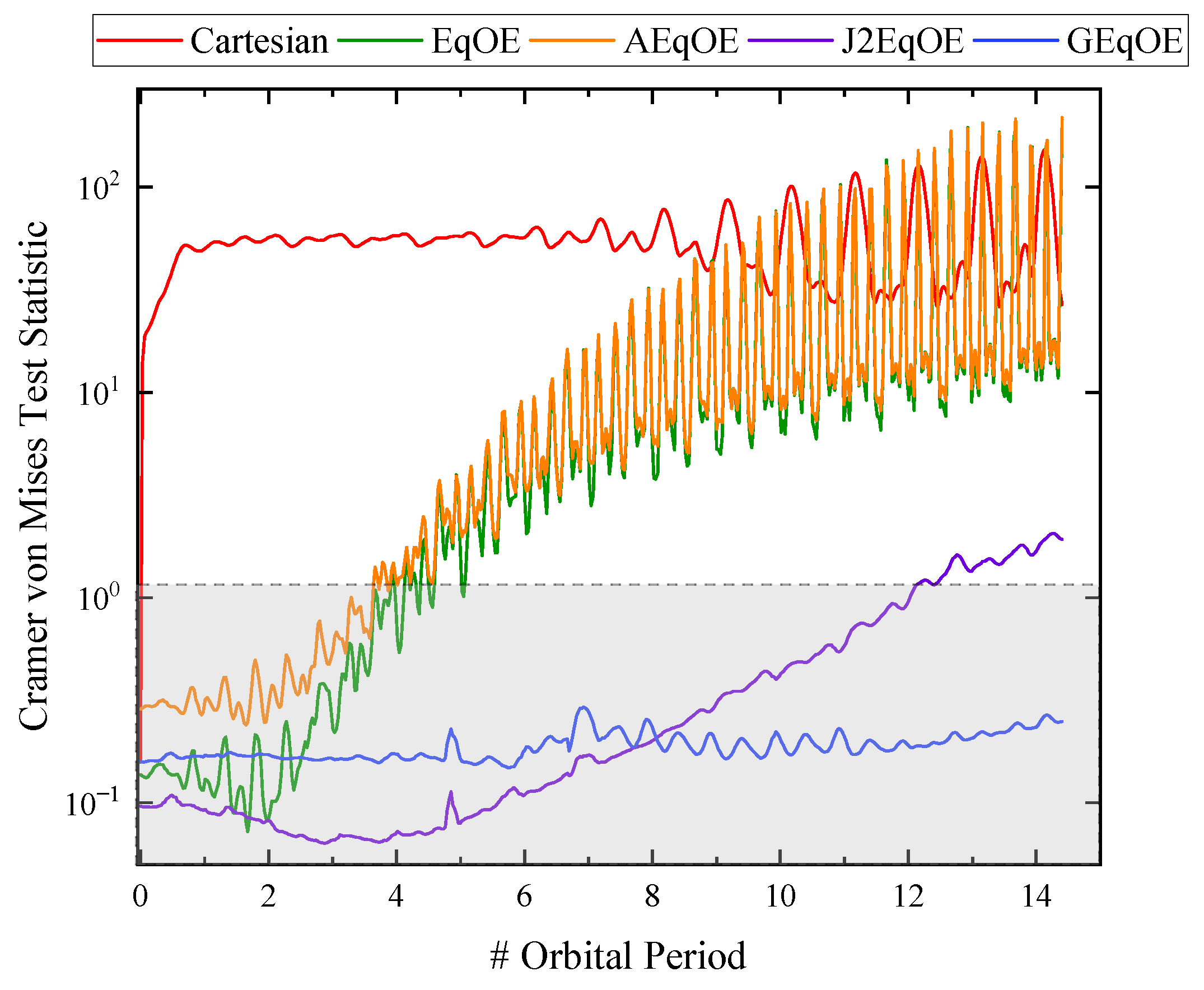
- This paper conducts a performance comparison of five orbital representations in mitigating dynamics nonlinearity during uncertainty propagation. The Cramer–von Mises test statistic demonstrates the excellence of the GEqOE representation in preserving uncertainty realism throughout propagation.
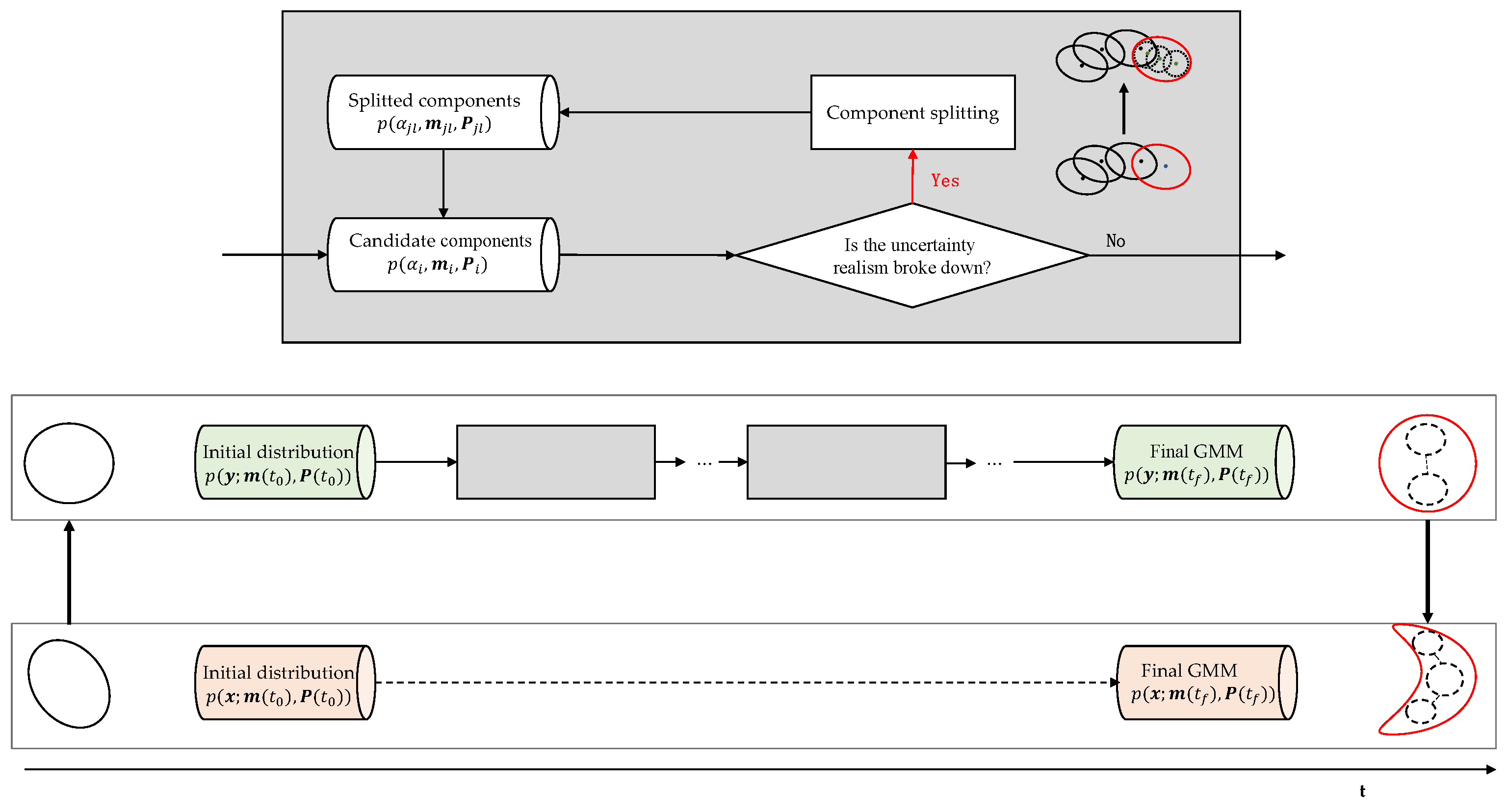
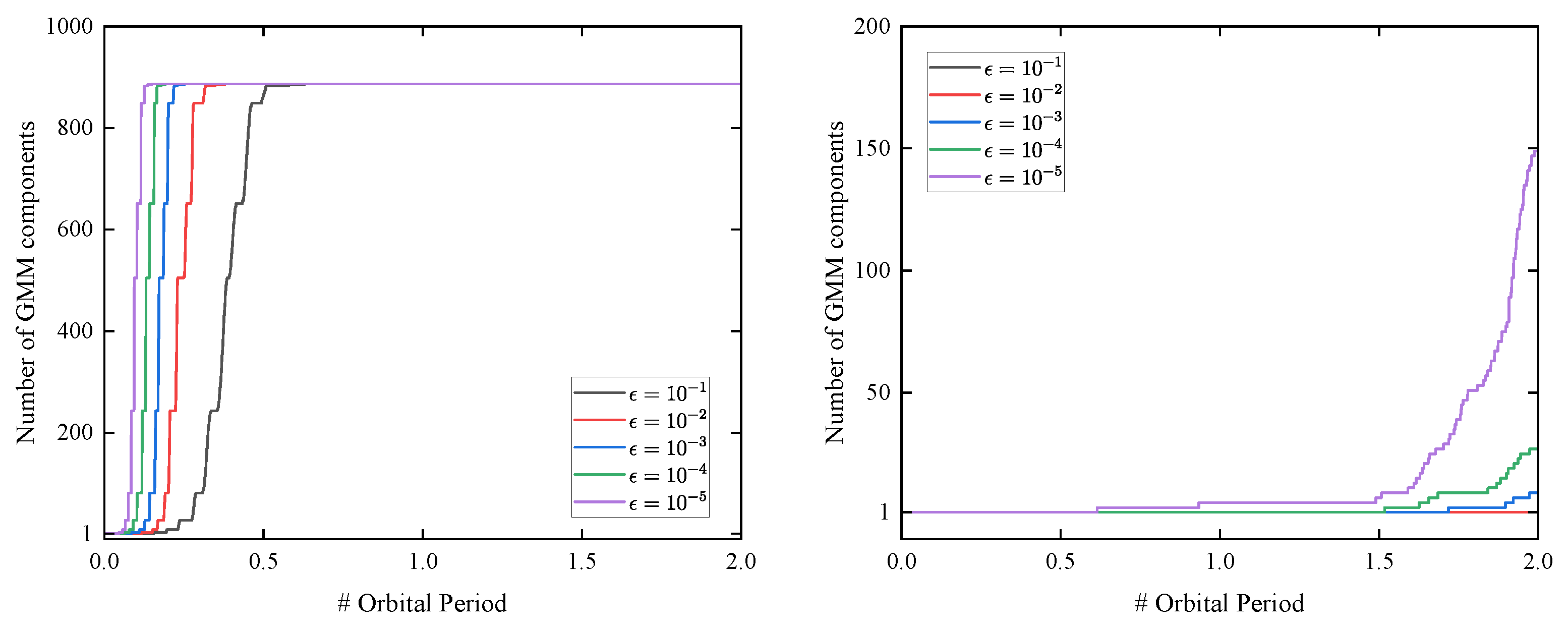
- This paper proposes an uncertainty propagation method named AEGIS-GEqOE, which combines the GMM strategy and the GEqOE state representation to efficiently and accurately propagate the uncertainty. The use of GEqOE allows us to reduce the number of GMM components required to describe the PDF of the propagated variables. Specifically, differential entropy-based splitting, designed to adaptively adjust the number of components, is applied with the GEqOE.
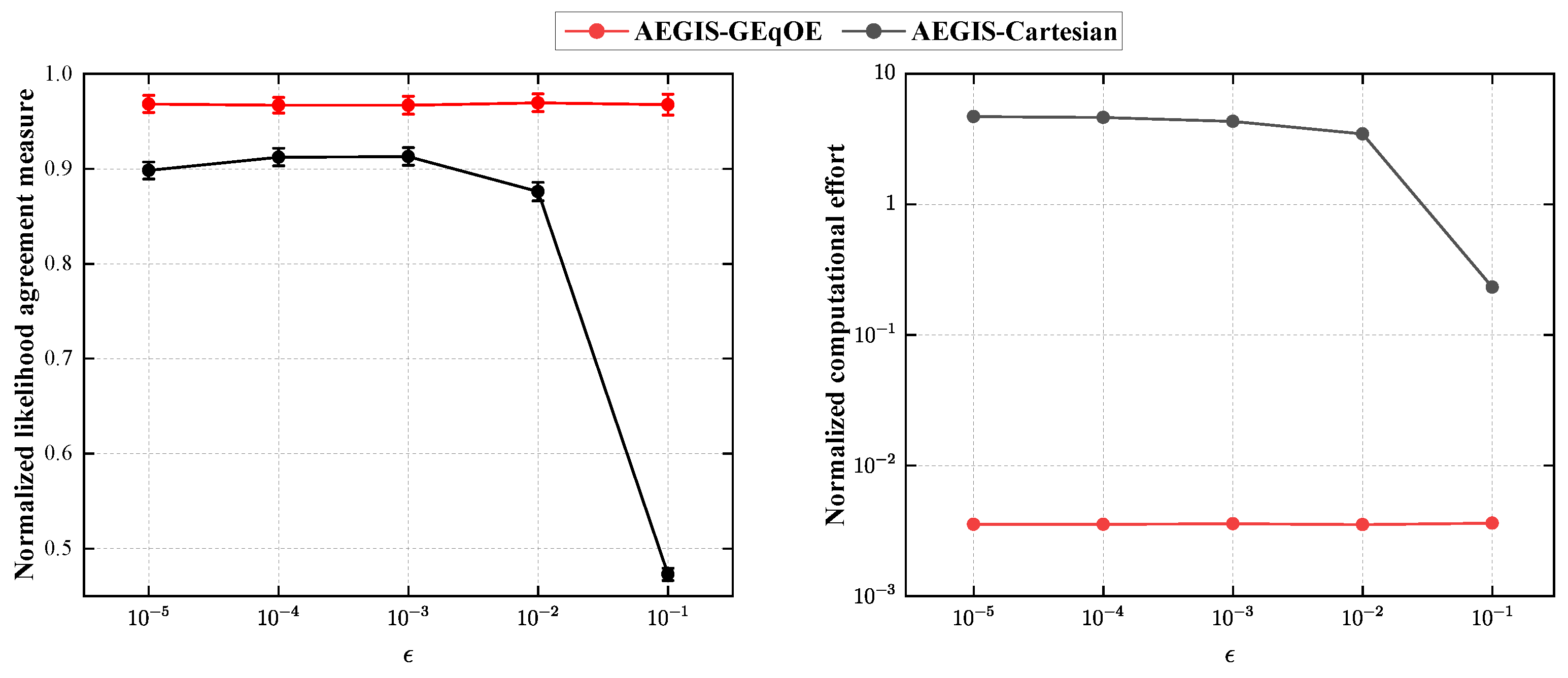
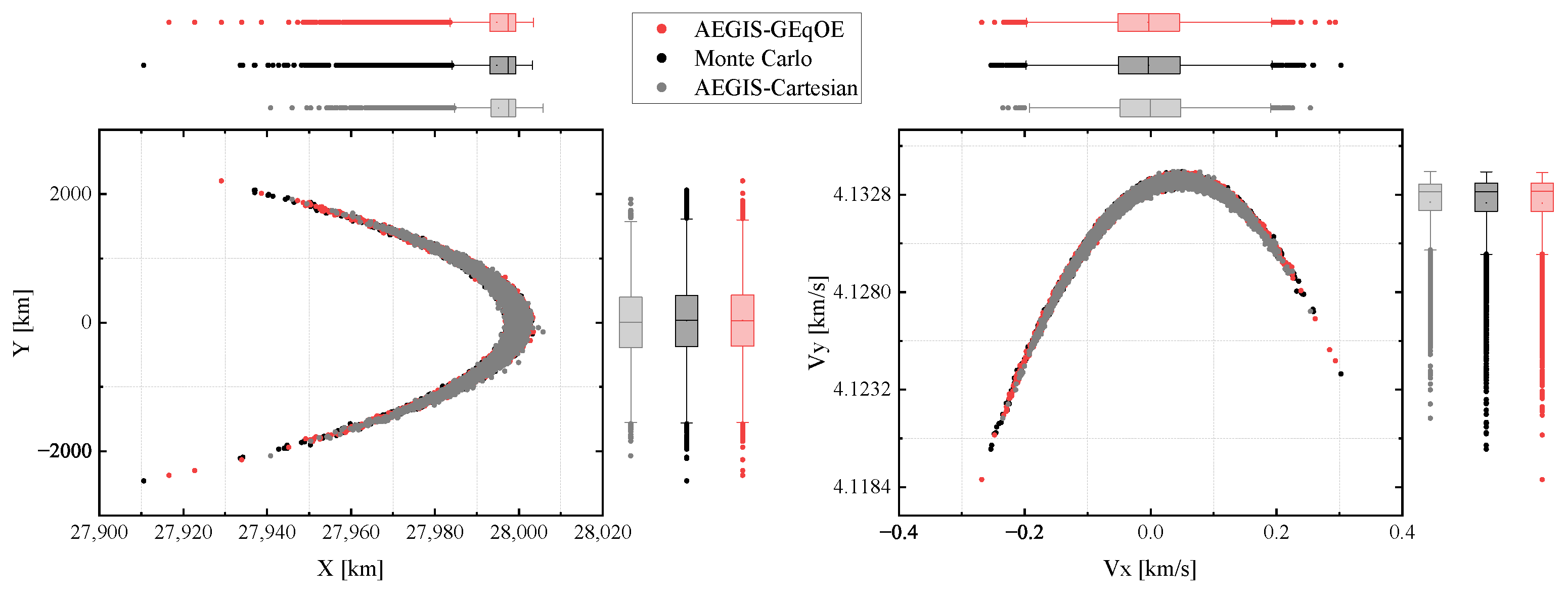
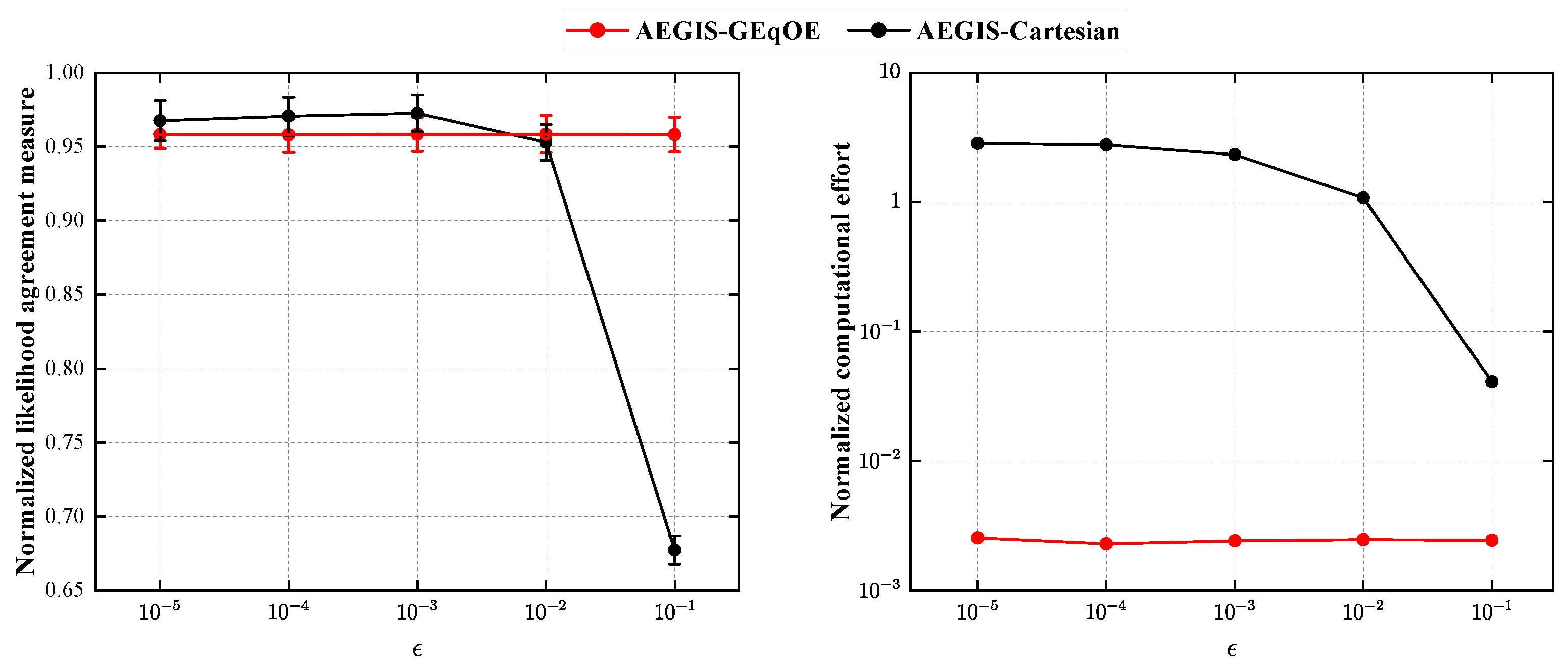
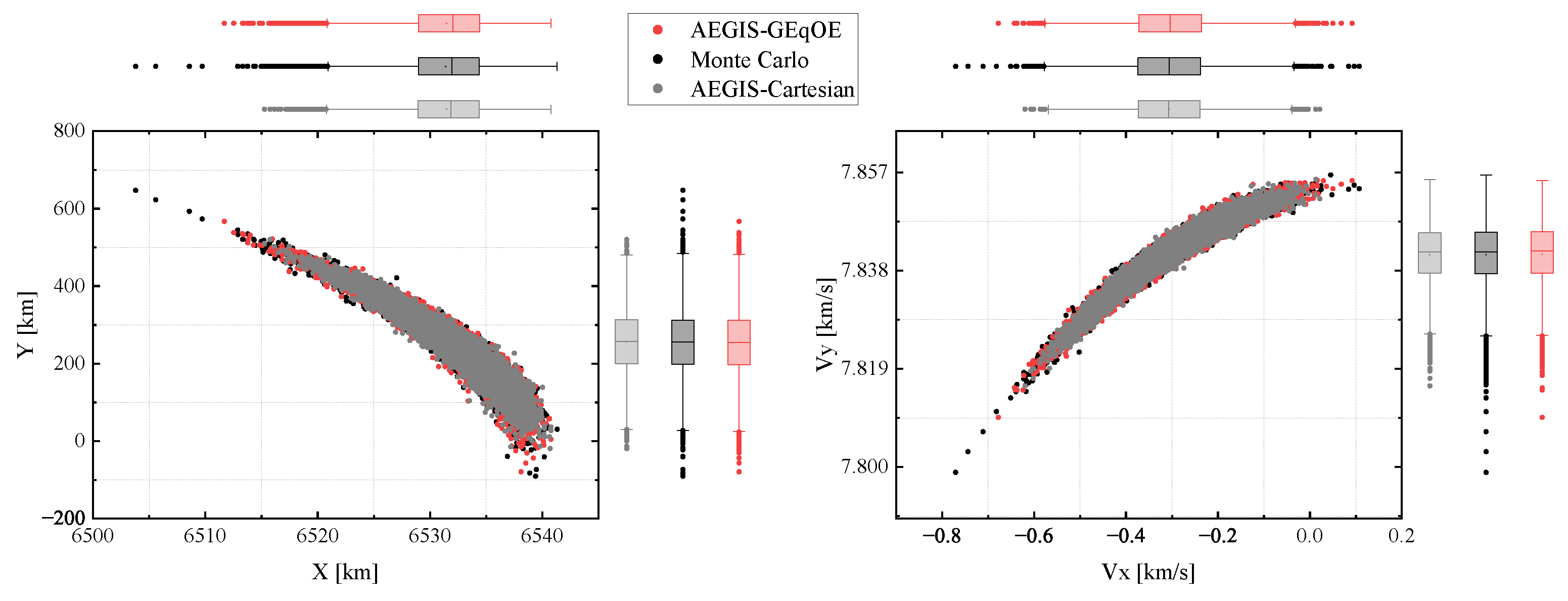
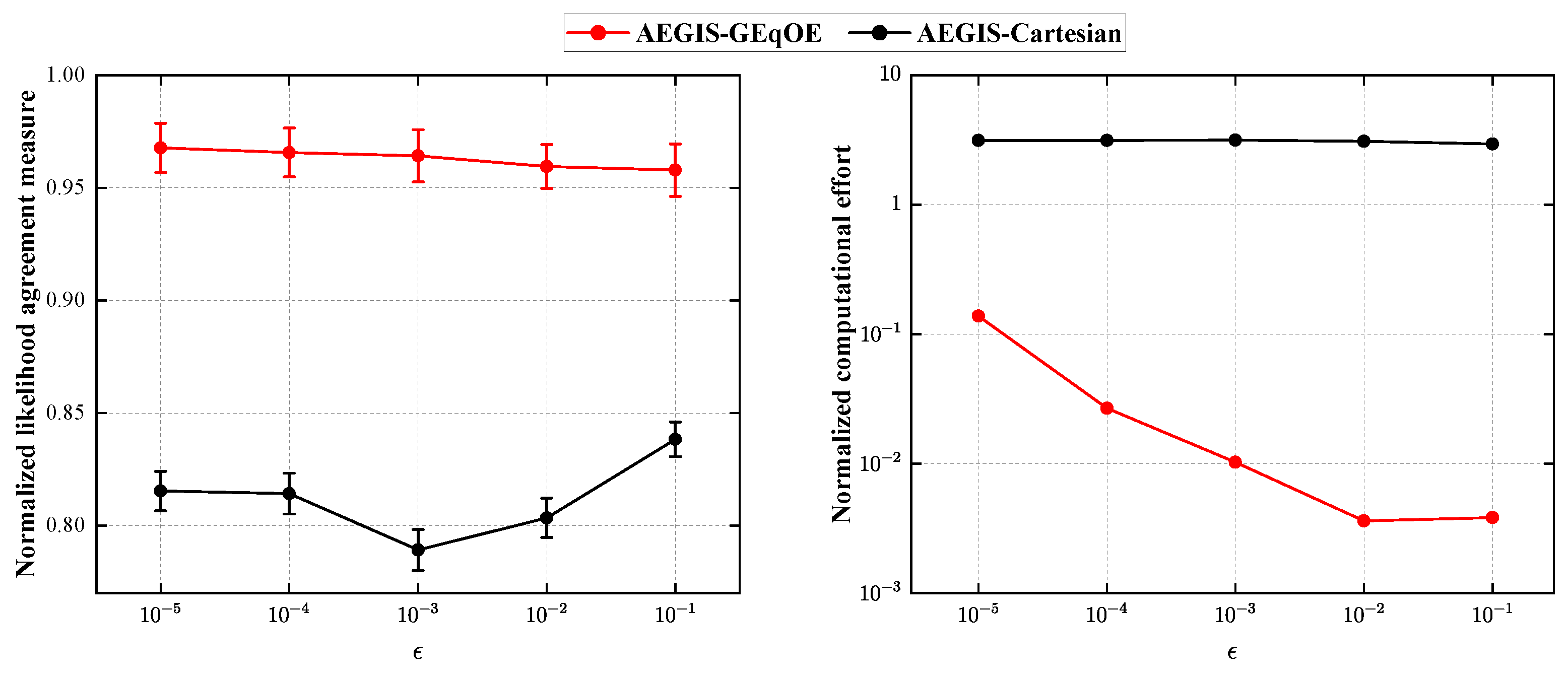
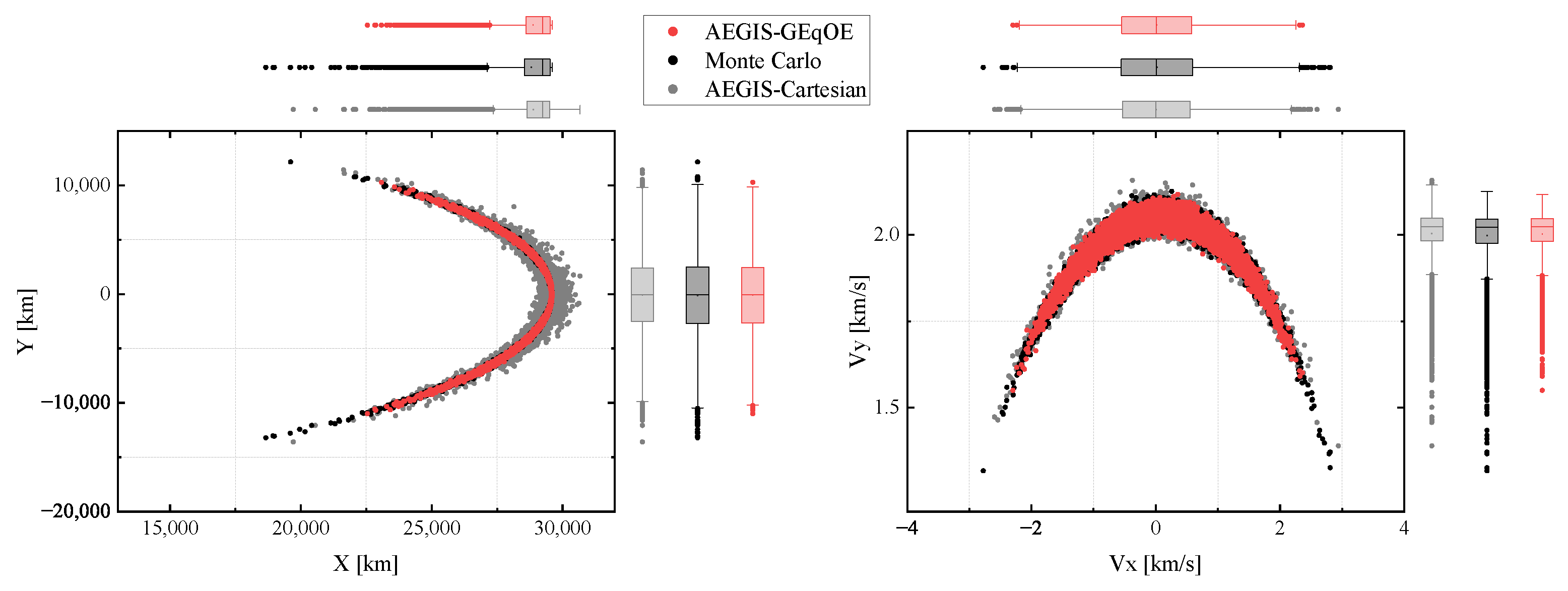
- To validate the performance of AEGIS-GEqOE in uncertainty propagation, we conduct simulation tests using three dynamics with increasing complexity. The proposed approach is compared with an adaptive GMM-UT method based on Cartesian representation. The test results show that our method achieves accuracy comparable to the MC results, while significantly reducing the number of Gaussian components compared to the Cartesian GMM approach. This demonstrates the balance achieved by our method between propagation accuracy and efficiency.
2. Problem Statement
3. Methodology
3.1. Proposed AEGIS-GEqOE
3.2. GMM Splitting Strategies
3.2.1. Differential Entropy-Based Splitting
| Algorithm 1 DeMars’s splitting strategy |
| Input: GMM component: , , ; univariate splitting library: , , ; Output: Splitted component set: ; 1: Spectral decomposition: , where . 2: Choose the splitting direction corresponding to the k-th eigenvalue : 3: for the s-th splitting individual of splitting library do 4: weight update: . 5: mean update: , where is the k-th eigenvector of . 6: covariance update: , where . 7: end for |
3.2.2. Multidirectional Splitting
3.3. Generalized Equinoctial Orbital Elements
3.3.1. Mathematical Formulation
3.3.2. Time Derivatives of the GEqOE
4. Results
4.1. Uncertainty Realism Evolution
4.1.1. Cramer–Von Mises Test
4.1.2. Changes of Uncertainty Realism under Different State Representations
4.2. Numerical Simulations
- Dynamic modeling
- Scenario setup
4.2.1. Definition of the Accuracy Measure
4.2.2. HEO Two-Body Dynamics
4.2.3. LEO J2-Induced Dynamics
4.2.4. MEO Full Dynamics
- Without Multidirectional Splitting
- With Multidirectional Splitting
5. Discussion
5.1. Uncertainty Realism Evolution with Different Representations
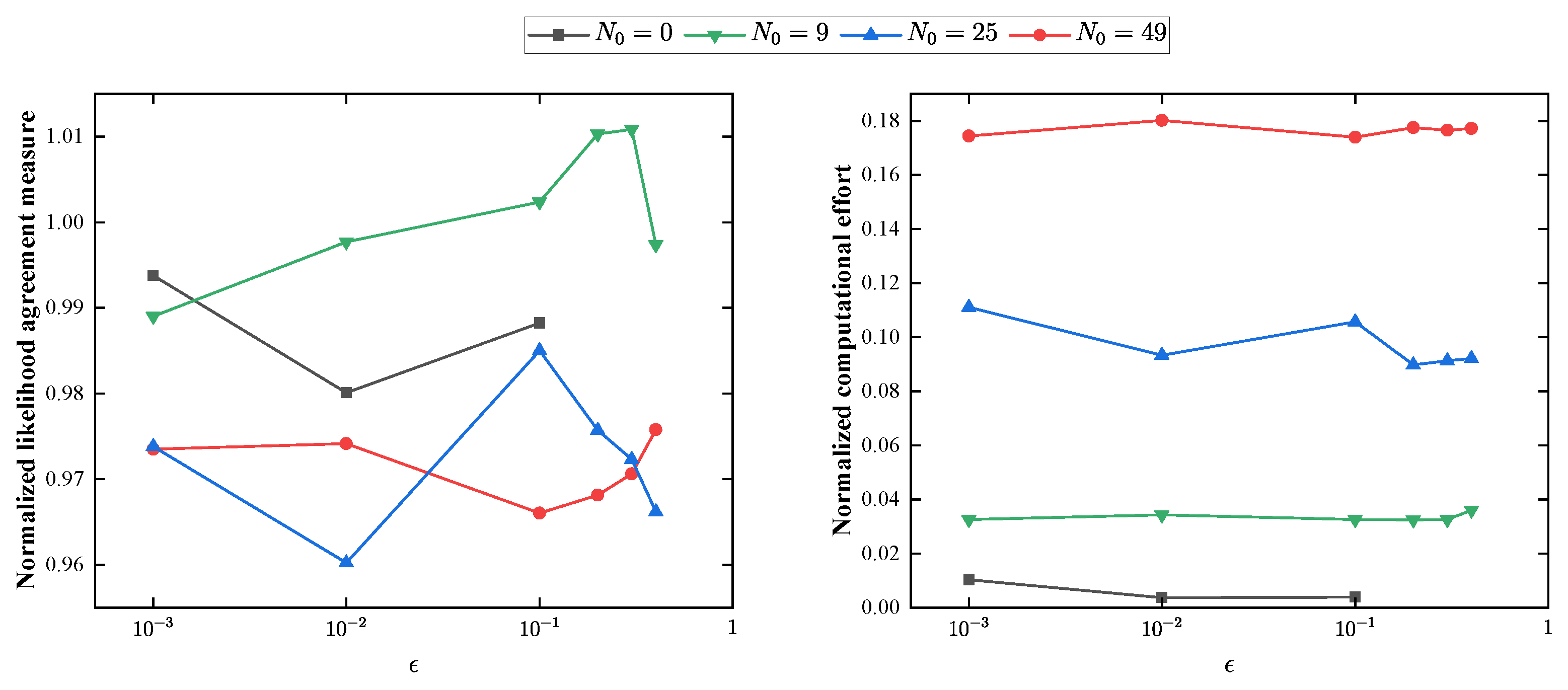
5.2. Performance Analysis of the Accuracy and Computational Efficiency for the Proposed Method
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, Y.; Chen, X.; Ran, D.; Zhao, Y.; Chen, Y.; Bai, Y. Spacecraft formation reconfiguration with multi-obstacle avoidance under navigation and control uncertainties using adaptive artificial potential function method. Astrodynamics 2020, 4, 41–56. [Google Scholar] [CrossRef]
- Qiao, D.; Zhou, X.; Li, X. Analytical configuration uncertainty propagation of geocentric interferometric detection constellation. Astrodynamics 2023, 7, 271–284. [Google Scholar] [CrossRef]
- Wittig, A.; Di Lizia, P.; Armellin, R.; Makino, K.; Bernelli-Zazzera, F.; Berz, M. Propagation of large uncertainty sets in orbital dynamics by automatic domain splitting. Celest. Mech. Dyn. Astron. 2015, 122, 239–261. [Google Scholar] [CrossRef]
- Vittaldev, V.; Russell, R.P. Space Object Collision Probability Using Multidirectional Gaussian Mixture Models. J. Guid. Control Dyn. 2016, 39, 2163–2169. [Google Scholar] [CrossRef]
- Bierbaum, M.M.; Joseph, R.I.; Fry, R.L.; Nelson, J.B. A Fokker-Planck model for a two-body problem. Bayesian Inference Maximum Entropy Methods Sci. Eng. 2002, 617, 340–371. [Google Scholar]
- Melman, J.C.P.; Mooij, E.; Noomen, R. State propagation in an uncertain asteroid gravity field. Acta Astronaut. 2013, 91, 8–19. [Google Scholar] [CrossRef]
- Luo, Y.Z.; Yang, Z. A review of uncertainty propagation in orbital mechanics. Prog. Aerosp. Sci. 2017, 89, 23–39. [Google Scholar] [CrossRef]
- Fujimoto, K.; Scheeres, D.J.; Alfriend, K.T. Analytical Nonlinear Propagation of Uncertainty in the Two-Body Problem. J. Guid. Control Dyn. 2012, 35, 497–509. [Google Scholar] [CrossRef]
- Younes, A.B. Exact Computation of High-Order State Transition Tensors for Perturbed Orbital Motion. J. Guid. Control Dyn. 2019, 42, 1365–1371. [Google Scholar] [CrossRef]
- Fossà, A.; Armellin, R.; Delande, E.; Losacco, M.; Sanfedino, F. Multifidelity Orbit Uncertainty Propagation using Taylor Polynomials. In Proceedings of the AIAA SCITECH 2022 Forum, San Diego, CA, USA, 3–7 January 2022. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Ito, K.; Xiong, K. Gaussian filters for nonlinear filtering problems. IEEE Trans. Autom. Control 2000, 45, 910–927. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature Kalman Filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Jia, B.; Xin, M. Orbital Uncertainty Propagation Using Positive Weighted Compact Quadrature Rule. J. Spacecr. Rockets 2017, 54, 683–697. [Google Scholar] [CrossRef]
- Jia, B.; Xin, M.; Cheng, Y. The high-degree cubature Kalman filter. In Proceedings of the 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), Maui, HI, USA, 10–13 December 2012; pp. 4095–4100. [Google Scholar] [CrossRef]
- Stenger, F. Approximate Calculation of Multiple Integrals (A. H. Stroud). SIAM Rev. 1973, 15, 234–235. [Google Scholar] [CrossRef]
- Adurthi, N.; Singla, P.; Singh, T. The Conjugate Unscented Transform—An approach to evaluate multi-dimensional expectation integrals. In Proceedings of the 2012 American Control Conference (ACC), Montreal, QC, Canada, 27–29 June 2012; pp. 5556–5561. [Google Scholar] [CrossRef]
- Jones, B.A.; Doostan, A.; Born, G.H. Nonlinear Propagation of Orbit Uncertainty Using Non-Intrusive Polynomial Chaos. J. Guid. Control Dyn. 2013, 36, 430–444. [Google Scholar] [CrossRef]
- Horwood, J.T.; Aragon, N.D.; Poore, A.B. Gaussian Sum Filters for Space Surveillance: Theory and Simulations. J. Guid. Control Dyn. 2011, 34, 1839–1851. [Google Scholar] [CrossRef]
- Alspach, D.; Sorenson, H. Nonlinear Bayesian estimation using Gaussian sum approximations. IEEE Trans. Autom. Control 1972, 17, 439–448. [Google Scholar] [CrossRef]
- Giza, D.; Singla, P.; Jah, M. An Approach for Nonlinear Uncertainty Propagation: Application to Orbital Mechanics. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009. [Google Scholar] [CrossRef]
- Vishwajeet, K.; Singla, P.; Jah, M. Nonlinear Uncertainty Propagation for Perturbed Two-Body Orbits. J. Guid. Control Dyn. 2014, 37, 1415–1425. [Google Scholar] [CrossRef]
- Yang, Z.; Luo, Y.Z.; Lappas, V.; Tsourdos, A. Nonlinear Analytical Uncertainty Propagation for Relative Motion near J2-Perturbed Elliptic Orbits. J. Guid. Control Dyn. 2018, 41, 888–903. [Google Scholar] [CrossRef]
- Yang, Z.; Luo, Y.Z.; Zhang, J. Nonlinear semi-analytical uncertainty propagation of trajectory under impulsive maneuvers. Astrodynamics 2019, 3, 61–77. [Google Scholar] [CrossRef]
- Sun, Z.J.; Luo, Y.Z.; di Lizia, P.; Zazzera, F.B. Nonlinear orbital uncertainty propagation with differential algebra and Gaussian mixture model. Sci. China Phys. Mech. Astron. 2018, 62, 34511. [Google Scholar] [CrossRef]
- Vittaldev, V.; Russell, R.P.; Linares, R. Spacecraft Uncertainty Propagation Using Gaussian Mixture Models and Polynomial Chaos Expansions. J. Guid. Control Dyn. 2016, 39, 2615–2626. [Google Scholar] [CrossRef]
- Yun, S.; Zanetti, R.; Jones, B.A. Kernel-based ensemble gaussian mixture filtering for orbit determination with sparse data. Adv. Space Res. 2022, 69, 4179–4197. [Google Scholar] [CrossRef]
- Jones, B.A.; Weisman, R. Multi-fidelity orbit uncertainty propagation. Acta Astronaut. 2019, 155, 406–417. [Google Scholar] [CrossRef]
- Xu, T.; Zhang, Z.; Han, H. Adaptive Gaussian Mixture Model for Uncertainty Propagation Using Virtual Sample Generation. Appl. Sci. 2023, 13, 3069. [Google Scholar] [CrossRef]
- D’Ortenzio, A.; Manes, C. Composite Transportation Dissimilarity in Consistent Gaussian Mixture Reduction. In Proceedings of the 2021 IEEE 24th International Conference on Information Fusion (FUSION), Sun City, South Africa, 1–4 November 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Blackman, S. Multiple hypothesis tracking for multiple target tracking. IEEE Aerosp. Electron. Syst. Mag. 2004, 19, 5–18. [Google Scholar] [CrossRef]
- Vishwajeet, K.; Singla, P. Adaptive Split/Merge-Based Gaussian Mixture Model Approach for Uncertainty Propagation. J. Guid. Control Dyn. 2018, 41, 603–617. [Google Scholar] [CrossRef]
- Broucke, R.A.; Cefola, P.J. On the equinoctial orbit elements. Celest. Mech. 1972, 5, 303–310. [Google Scholar] [CrossRef]
- Horwood, J.T.; Aristoff, J.M.; Singh, N.; Poore, A.B.; Hejduk, M.D. Beyond covariance realism: A new metric for uncertainty realism. In Proceedings of the Signal and Data Processing of Small Targets 2014; Drummond, O.E., Ed.; International Society for Optics and Photonics. SPIE: Bellingham, WA, USA, 2014; Volume 9092, p. 90920F. [Google Scholar] [CrossRef]
- Aristoff, J.M.; Horwood, J.T.; Alfriend, K.T. On a set of J2 equinoctial orbital elements and their use for uncertainty propagation. Celest. Mech. Dyn. Astron. 2021, 133, 9. [Google Scholar] [CrossRef]
- Baù, G.; Hernando-Ayuso, J.; Bombardelli, C. A generalization of the equinoctial orbital elements. Celest. Mech. Dyn. Astron. 2021, 133, 50. [Google Scholar] [CrossRef]
- Hernando-Ayuso, J.; Bombardelli, C.; Baù, G.; Martínez-Cacho, A. Near-Linear Orbit Uncertainty Propagation Using the Generalized Equinoctial Orbital Elements. J. Guid. Control Dyn. 2023, 46, 654–665. [Google Scholar] [CrossRef]
- Horwood, J.T.; Poore, A.B. Adaptive Gaussian Sum Filters for Space Surveillance. IEEE Trans. Autom. Control 2011, 56, 1777–1790. [Google Scholar] [CrossRef]
- Psiaki, M.L. Gaussian Mixture Filter for Angles-Only Orbit Determination in Modified Equinoctial Elements. J. Guid. Control Dyn. 2022, 45, 73–83. [Google Scholar] [CrossRef]
- DeMars, K.J.; Bishop, R.H.; Jah, M.K. Entropy-Based Approach for Uncertainty Propagation of Nonlinear Dynamical Systems. J. Guid. Control Dyn. 2013, 36, 1047–1057. [Google Scholar] [CrossRef]
- Sun, P.; Colombo, C.; Trisolini, M.; Li, S. Hybrid Gaussian Mixture Splitting Techniques for Uncertainty Propagation in Nonlinear Dynamics. J. Guid. Control Dyn. 2023, 46, 770–780. [Google Scholar] [CrossRef]
- Vittaldev, V.; Russell, R.P. Multidirectional Gaussian Mixture Models for Nonlinear Uncertainty Propagation. Comput. Model. Eng. Sci. 2016, 111, 83–117. [Google Scholar] [CrossRef]
- Shampine, L.F.; Gordon, M.K. Computer Solution of Ordinary Differential Equations: The Initial Value Problem; Freeman: San Francisco, CA, USA, 1975. [Google Scholar]
- Tapley, B.; Ries, J.; Bettadpur, S.; Chambers, D.; Cheng, M.; Condi, F.; Poole, S. The GGM03 mean Earth gravity model from GRACE. AGU Fall Meet. Abstr. 2007, 2007, G42A-03. [Google Scholar]
- Park, R.; Folkner, W.; Williams, J.; Boggs, D. The JPL Planetary and Lunar Ephemerides DE440 and DE441. Astron. J. 2021, 161, 105. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| a, km | e | i | M | ||
| 7136.6 | 0.00949 | 72.9 | 116 | 57.7 | 105.5 |
| , km | |||||
| 20 |
| Case | a, km | e | i | M | ||
|---|---|---|---|---|---|---|
| LEO | 6603.0 | 0.01 | 0.0 | 0.0 | 0.0 | 0.0 |
| HEO | 35,000.0 | 0.2 | 0.0 | 0.0 | 0.0 | 0.0 |
| MEO | 29,600.135 | 0.0 | 56.0 | 0.0 | 0.0 | 0.0 |
| Case | x, km | y, km | z, km | , km/s | , km/s | , km/s |
|---|---|---|---|---|---|---|
| LEO | 1.3 | 0.5 | 1.0 | |||
| HEO | 1.0 | 1.0 | 1.0 | |||
| MEO | 0.5 | 1.0 | 1.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, H.; Xue, T.; Xu, W.; Liu, G.; Sun, H.; Sun, S. Orbital Uncertainty Propagation Based on Adaptive Gaussian Mixture Model under Generalized Equinoctial Orbital Elements. Remote Sens. 2023, 15, 4652. https://doi.org/10.3390/rs15194652
Xie H, Xue T, Xu W, Liu G, Sun H, Sun S. Orbital Uncertainty Propagation Based on Adaptive Gaussian Mixture Model under Generalized Equinoctial Orbital Elements. Remote Sensing. 2023; 15(19):4652. https://doi.org/10.3390/rs15194652
Chicago/Turabian StyleXie, Hui, Tianru Xue, Wenjun Xu, Gaorui Liu, Haibin Sun, and Shengli Sun. 2023. "Orbital Uncertainty Propagation Based on Adaptive Gaussian Mixture Model under Generalized Equinoctial Orbital Elements" Remote Sensing 15, no. 19: 4652. https://doi.org/10.3390/rs15194652