
Promising Uses of the iPad Pro Point Clouds: The Case of the Trunk Flare Diameter Estimation in the Urban Forest

 , ,
, ,  , and
, and
Abstract
:1. Introduction
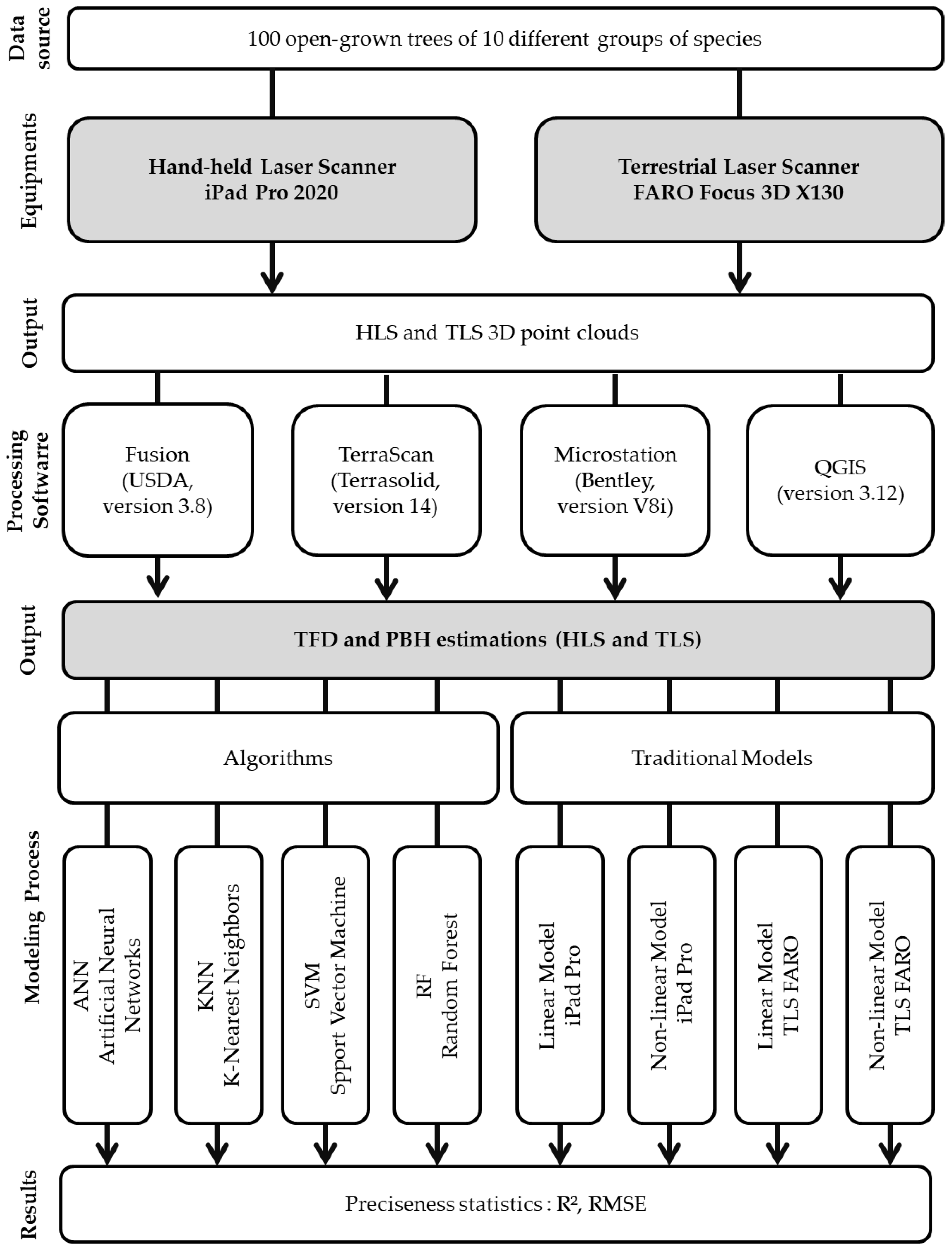
2. Materials and Methods
2.1. Information on the Study Area
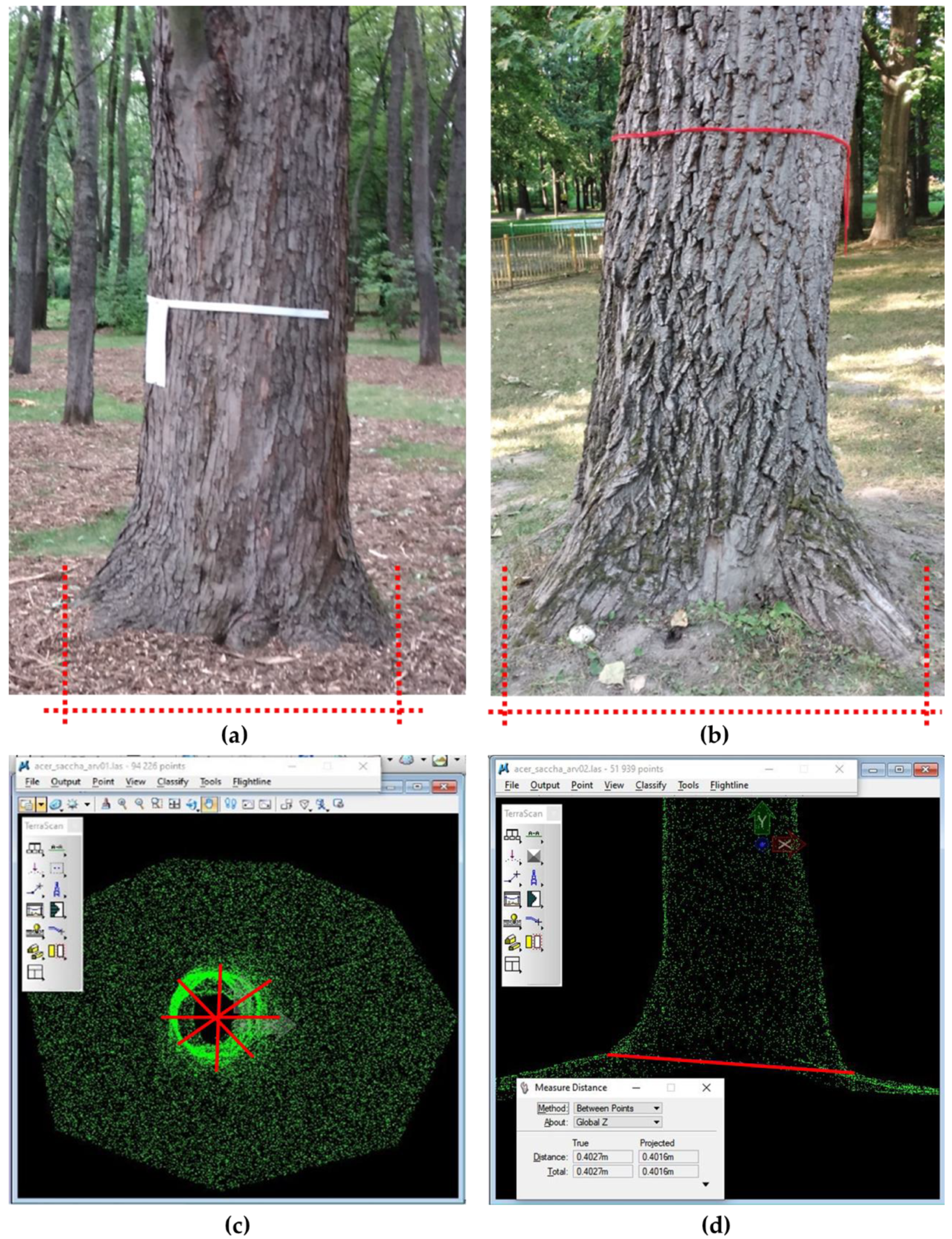
2.2. Procedures for Data Acquisition
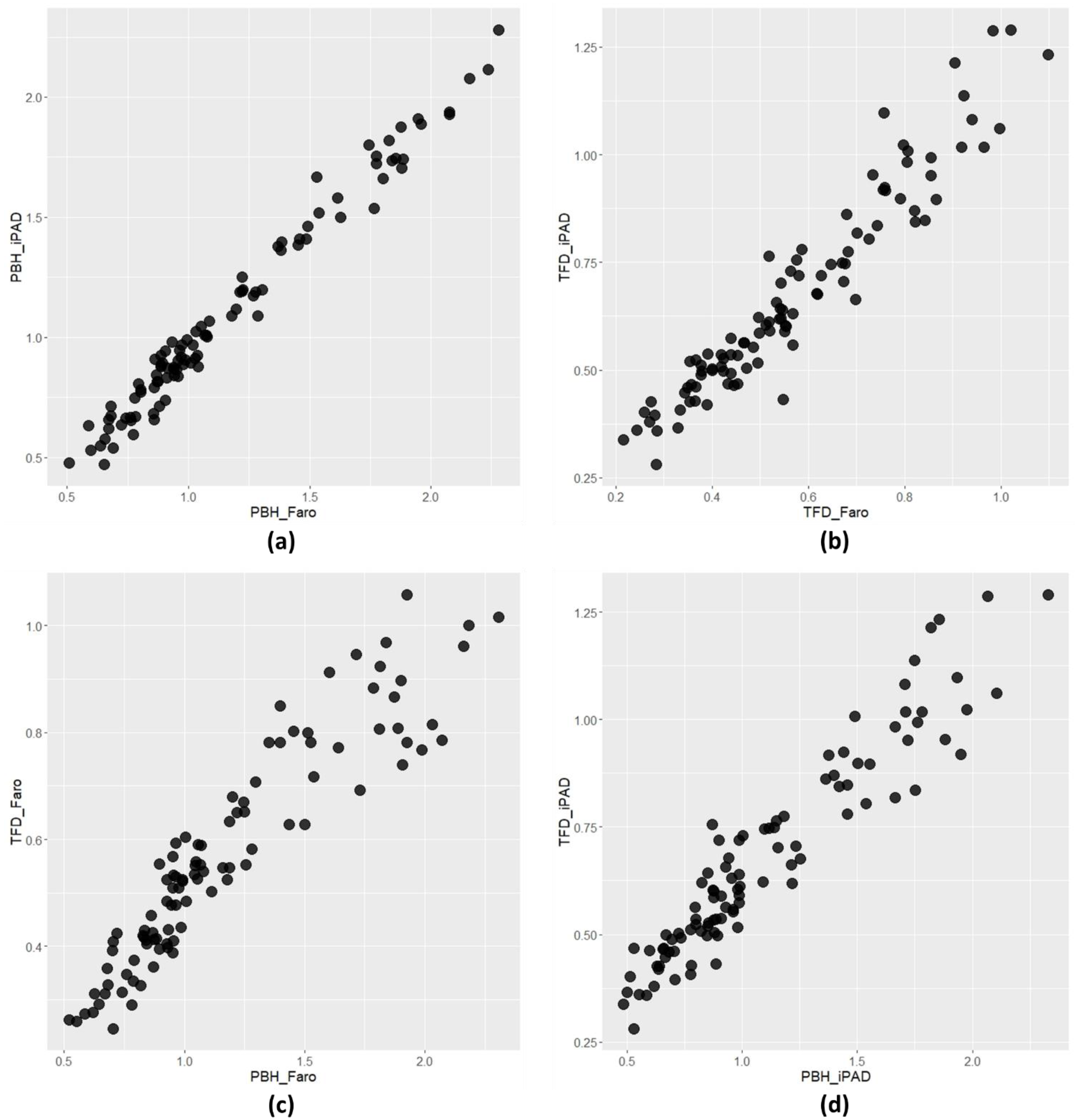
2.3. Procedures to Analyze the Point Clouds
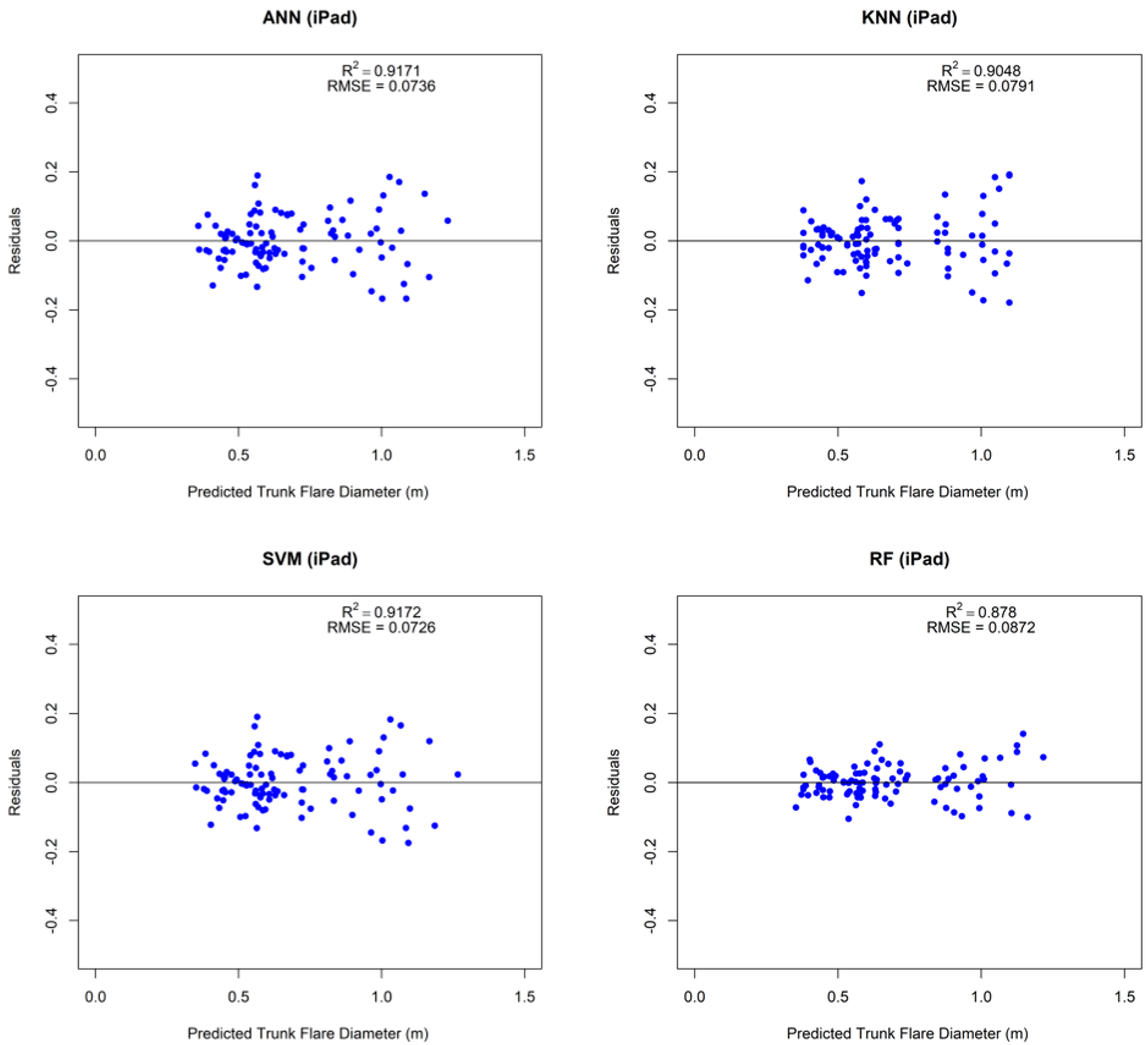
2.4. Procedures to Predict the Trunk Flare Diameter (TFD)
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Widney, S.; Fischer, B.C.; Vogt, J. Tree Mortality Undercuts Ability of Tree-Planting Programs to Provide Benefits: Results of a Three-City Study. Forests 2016, 7, 65. [Google Scholar] [CrossRef]
- Lyytimäki, J. Disservices of urban trees. In Routledge Handbook of Urban Forestry; Ferrini, F., Van Den Bosch, C.C.K., Fini, A., Eds.; Taylor & Francis Group: New York, NY, USA, 2017; pp. 164–176. [Google Scholar] [CrossRef]
- Sharifi, A. Resilient urban forms: A review of literature on streets and street networks. Build. Environ. 2019, 147, 171–187. [Google Scholar] [CrossRef]
- Nowak, D.J.; Greenfield, E.J.; Hoehn, R.W.; Lapoint, E. Carbon storage and sequestration by trees in urban and community areas of the United States. Environ. Pollut. 2013, 178, 229–236. [Google Scholar] [CrossRef] [PubMed]
- Szota, C.; Coutts, A.M.; Thom, J.K.; Virahsawmy, H.K.; Fletcher, T.D.; Livesley, S.J. Street tree stormwater control measures can reduce runoff but may not benefit established trees. Landsc. Urban Plan. 2019, 182, 144–155. [Google Scholar] [CrossRef]
- Klemm, W.; Heusinkveld, B.G.; Lenzholzer, S.; Hove, B. Street greenery and its physical and psychological impact on thermal comfort. Landsc. Urban Plan. 2015, 138, 87–98. [Google Scholar] [CrossRef]
- Schwarz, K.; Fragkias, M.; Boone, C.G.; Zhou, W.; McHale, M.; Grove, J.M.; O’Neil-Dunne, J.; McFadden, J.P.; Buckley, G.L.; Childers, D.; et al. Trees Grow on Money: Urban Tree CanopyCover and Environmental Justice. PLoS ONE 2015, 10, e122051. [Google Scholar] [CrossRef]
- Urban, J. Up by Roots: Healthy Soils and Trees in the Built Environment; ISA: Champaign, IL, USA, 2008. [Google Scholar]
- Mullaney, J.; Lucke, T.; Trueman, S.J. A review of benefits and challenges in growing street trees in paved urban environments. Landsc. Urban Plan. 2015, 134, 157–166. [Google Scholar] [CrossRef]
- Ordóñez, C.; Duinker, P.N. An analysis of urban forest management plans in Canada: Implications for urban forest management. Landsc. Urban Plan. 2013, 116, 36–47. [Google Scholar] [CrossRef]
- Gao, J.; O’Neill, B.C. Mapping global urban land for the 21st century with data-driven simulations and Shared Socioeconomic Pathways. Nat. Commun. 2020, 11, 2302. [Google Scholar] [CrossRef]
- North, E.A.; Johnson, G.R.; Burk, T.E. Trunk flare diameter predictions as an infrastructure planning tool to reduce tree and sidewalk conflicts. Urban For. Urban Green. 2015, 14, 65–71. [Google Scholar] [CrossRef]
- Hilbert, D.R.; North, E.A.; Hauer, R.J.; Koeser, A.K.; McLean, D.C.; Northrop, R.J.; Andreu, M.; Parbs, S. Predicting trunk flare diameter to prevent tree damage to infrastructure. Urban For. Urban Green. 2020, 49, 126645. [Google Scholar] [CrossRef]
- Mattheck, C.; Breloer, H. The Body Language of Trees: A Handbook for Failure Analysis; The Stationery Office: London, UK, 1993. [Google Scholar]
- Hirons, A.D.; Thomas, P.A. Applied Tree Biology; Willey Blackwell: Oxford, UK, 2018. [Google Scholar] [CrossRef]
- North, E.A.; D’Amato, A.W.; Russell, M.B.; Johnson, G.R. The influence of sidewalk replacement on urban street tree growth. Urban For. Urban Green. 2017, 24, 116–124. [Google Scholar] [CrossRef]
- Koeser, A.K.; Hauer, R.J.; Hilbert, D.R.; Northrop, R.J.; Thorn, H.; Mclean, D.C.; Salisbury, A.B. The Tripping Point–Minimum Planting Widths for Small-Stature Trees in Dense Urban Developments. Sustainability 2022, 14, 3283. [Google Scholar] [CrossRef]
- Bienert, A.; Scheller, S.; Keane, E.; Mullooly, G.; Mohan, F. Application of Terrestrial Laser Sanners for the Determination of Forest Inventory Parameters. In Image Engineering and Vision Metrology; Maas, H.-G., Schneider, D., Eds.; International Archives of Photogrametry, Remote Sensing and Spatial Information Sciences: Dresden, Germany, 2006; Volume XXXVI. [Google Scholar]
- Wężyk, P.; Tompalski, P. Determining the tree density parameter in pine stands based on the analysis of the terrestrial laser scanning point clouds. Ann. Geomatics 2010, 8, 83–90. [Google Scholar]
- Wężyk, P.; Sroga, R.; Szwed, P.; Szostak, M.; Tompalski, P.; Kozioł, K. Application of terrestrial laser scanning for derriving selected trees and forest stand parameters. Arch. Photogramm. Cartogr. Remote Sens. 2009, 19, 447–457. [Google Scholar]
- Henning, J.G.; Radtke, P.J. Detailed Stem Measurements of Standing Trees from Ground Based Scanning Lidar. For. Sci. 2006, 52, 67–80. [Google Scholar]
- Wang, X.; Singh, A.; Pervysheva, Y.; Lamatungga, K.E.; Murtinová, V.; Mukarram, M.; Zhu, Q.; Song, K.; Surový, P.; Mokroš, M. Evaluation of iPad Pro 2020 for estimating tree diameters in urban forest. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, 8, 105–110. [Google Scholar] [CrossRef]
- Gollob, C.; Ritter, T.; Kraßnitzer, R.; Tockner, A.; Nothdurft, A. Measurement of Forest Inventory Parameters with Apple iPad Pro and Integrated LiDAR Technology. Remote Sens. 2021, 13, 3129. [Google Scholar] [CrossRef]
- Mokroš, M.; Mikita, T.; Singh, A.; Tomaštík, J.; Chudá, J.; Wężyk, P.; Kuželka, K.; Surový, P.; Klimánek, M.; Zięba-Kulawik, K.; et al. Novel low-cost mobile mapping systems for forest inventories as terrestrial laser scanning alternatives. Int. J. Appl. Earth Obs. Geoinf. 2021, 104, 102512. [Google Scholar] [CrossRef]
- Tatsumi, S.; Yamaguchi, K.; Furuya, N. ForestScanner: A mobile application for measuring and mapping trees with LiDAR-equipped iPhone and iPad. Methods Ecol. Evol. 2022, 00, 1–7. [Google Scholar] [CrossRef]
- Çakir, G.Y.; Post, C.J.; Mikhailova, E.A.; Schlautman, M.A. 3D LiDAR Scanning of Urban Forest Structure Using a Consumer Tablet. Urban Sci. 2021, 5, 88. [Google Scholar] [CrossRef]
- Wang, F.; Heenkenda, M.K.; Freeburn, J.T. Estimating tree Diameter at Breast Height (DBH) using an iPad Pro LiDAR sensor. Remote Sens. Lett. 2022, 13, 568–578. [Google Scholar] [CrossRef]
- McGaughey, R.J. FUSION/LDV LIDAR: Software for LIDAR Data Analysis Andvisualization, Version 3.80; USDA Forest Service: Pacific Northwest Research Station: Portland, OR, USA, 2018; Available online: http://forsys.cfr.washington.edu/fusion/fusion_overview.html (accessed on 17 July 2020).
- Matloff, N. Statistical Regression and Classification—From Linear Models to Machine Learning; Taylor & Francis Group: New York, NY, USA, 2017. [Google Scholar] [CrossRef]
- Tavares Júnior, I.S.; Rocha, J.E.C.; Ebling, A.E.; Chaves, A.S.; Zanuncio, J.C.; Farias, A.A.; Leite, H.G. Artificial Neural Networks and Linear Regression Reduce Sample Intensity to Predict the Commercial Volume of Eucalyptus Clones. Forests 2019, 10, 268. [Google Scholar] [CrossRef]
- Júnior, I.D.S.T.; Torres, C.M.M.E.; Leite, H.G.; de Castro, N.L.M.; Soares, C.P.B.; Castro, R.V.O.; Farias, A.A. Machine learning: Modeling increment in diameter of individual trees on Atlantic Forest fragments. Ecol. Indic. 2020, 117, 106685. [Google Scholar] [CrossRef]
- Aksu, G.; Güzeller, C.O.; Eser, M.T. The effect of the normalization method used in different sample sizes on the success of artificial neural network model. Int. J. Assess. Tools Educ. 2019, 6, 170–192. [Google Scholar] [CrossRef]
- Song, Q.C.; Tang, C.; Wee, S. Making sense of model generalizability: A tutorial on cross-validation in R and Shiny. Adv. Methods Pract. Psychol. Sci. 2021, 4, 2515245920947067. [Google Scholar] [CrossRef]
- Thongpeth, W.; Lim, A.; Wongpairin, A.; Thongpeth, T.; Chaimontree, S. Comparison of linear, penalized linear and machine learning models predicting hospital visit costs from chronic disease in Thailand. Inform. Med. Unlocked 2021, 26, 100769. [Google Scholar] [CrossRef]
- Scholz, M.; Uzomah, V.C.; Al-Faraj, F.A.M. Potential tree species for use in urban areas in temperate and oceanic climates. Heliyon 2016, 2, e00154. [Google Scholar] [CrossRef]
- Benatti, D.P.; Tonello, K.C.; Adriano Júnior, F.C.; Silva, J.M.S.; Oliveira, I.R.; Rolim, E.N.; Ferraz, D.L. Inventário arbóreo-urbano do município de Salto de Pirapora, SP. Árvore 2012, 36, 887–894. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Source | Models’ Variables and Coefficients | R2 | R2adj. | Syx% | RMSE (m) | |
| 1 | iPad Pro | TFD = 0.1119 + (0.5113 × PBH) | 0.8998 | 0.8988 | 7.5 | 0.0741 |
| 2 | iPad Pro | TFD = (e 1.2502 − (1.6901 × (1/√PBH))) × (e (0.5 × 0.013828909)) | 0.8818 | 0.8806 | 11.7 | 0.0774 |
| 3 | TLS FARO | TFD = 0.5216 + (0.5354 × (ln PBH)) | 0.8984 | 0.8973 | 6.5 | 0.0646 |
| 4 | TLS FARO | TFD = (e 1.3497 − (2.0349 × (1/√PBH))) × (e (0.5 × 0.011781564)) | 0.9120 | 0.9111 | 10.8 | 0.0651 |
| Data Source | Algorithm | R2 | RMSE (m) |
| iPad Pro (Abound Capture) | ANN | 0.9171 | 0.0736 |
| iPad Pro (Abound Capture) | KNN | 0.9048 | 0.0791 |
| iPad Pro (Abound Capture) | SVM | 0.9172 | 0.0726 |
| iPad Pro (Abound Capture) | RF | 0.8780 | 0.0872 |
| TLS FARO (3D X130 Model) | ANN | 0.9164 | 0.0649 |
| TLS FARO (3D X130 Model) | KNN | 0.9106 | 0.0668 |
| TLS FARO (3D X130 Model) | SVM | 0.9159 | 0.0671 |
| TLS FARO (3D X130 Model) | RF | 0.8961 | 0.0702 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bobrowski, R.; Winczek, M.; Silva, L.P.; Cuchi, T.; Szostak, M.; Wężyk, P. Promising Uses of the iPad Pro Point Clouds: The Case of the Trunk Flare Diameter Estimation in the Urban Forest. Remote Sens. 2022, 14, 4661. https://doi.org/10.3390/rs14184661
Bobrowski R, Winczek M, Silva LP, Cuchi T, Szostak M, Wężyk P. Promising Uses of the iPad Pro Point Clouds: The Case of the Trunk Flare Diameter Estimation in the Urban Forest. Remote Sensing. 2022; 14(18):4661. https://doi.org/10.3390/rs14184661
Chicago/Turabian StyleBobrowski, Rogério, Monika Winczek, Lucas Polo Silva, Tarik Cuchi, Marta Szostak, and Piotr Wężyk. 2022. "Promising Uses of the iPad Pro Point Clouds: The Case of the Trunk Flare Diameter Estimation in the Urban Forest" Remote Sensing 14, no. 18: 4661. https://doi.org/10.3390/rs14184661