1. Introduction
Recent calls for a reduced carbon footprint have led transit authorities to adopt battery electric buses (BEBs). Replacing diesel and CNG buses with BEBs reduces environmental impact [
1], as BEBs provide zero vehicle emissions and can access renewable energy sources [
2,
3].
Charging BEBs draws power from the electrical infrastructure. The combined effect of BEB charging with other necessary loads can exceed the capacity of local distribution circuits [
4,
5,
6], leading to expensive infrastructure upgrades. Power providers pass the cost of upgrades on to customers. Thus, the benefits of large-scale electrified bussing seem appealing at first but are only practical if infrastructural upgrades can be deferred or avoided altogether.
One approach to deferring or avoiding upgrades is to intentionally manage when and at what rates buses should charge. An optimal charge plan must account for a number of physical constraints and operational realities. For example, buses must exceed a minimum charge level while adhering to route schedules, batteries must have sufficient time to charge, and buses must share a limited number of chargers. The focus of this work is to find an optimal charge schedule which meets these requirements and minimizes the cost of electricity and grid impacts in the presence of other uncontrolled loads. This problem is referred to hereafter as the “charge problem”.
Previous work has done much to further state of the art in this regard with solutions ranging from heuristic approaches and linear programs to battery exchanges (see
Section 2 for details). The contributions our paper offers, which we have not observed in the current literature, is the combination of (1) differences in night and day charging, (2) the ability to vary charge rates, (3) incorporating non-BEB grid activity into the optimization scheme, and (4) the use of a real-world rate schedule which encompasses both time-of-use energy rates and demand fees to reduce the instantaneous load on the grid.
Without these elements, a charge schedule may not fully utilize the available charging resources to reduce the monthly cost of energy. For example, Rocky Mountain Power may charge upwards of USD 15.00 per kW for the largest use of instantaneous power over a 15 min window, which may account for over a third of the monthly power expenses. Additionally, Rocky Mountain Power may also charge close to double for energy used during on-peak hours. While previous work has addressed time-of-use tariffs [
7] and instantaneous power demand [
8], we have not seen these elements together, and minimizing using Rocky Mountain Power’s rate schedule provides a clear way of integrating the two.
Another example where our work addresses unsolved issues lies on the use of night/day charge parameters. In the Utah Transit Authority station in Salt Lake City, Utah, buses are able to charge on a limited number of fast overhead chargers during the day, and an unlimited number of slower chargers at night. By breaking the problem into day and night segments, we encode these differences into the optimization framework. For a comprehensive list of contributions, please see
Section 2.3.
The remainder of this paper is organized as follows:
Section 2 describes prior related work, and
Section 3 outlines a graph-based framework for modeling the environment, including buses, routes, chargers, and uncontrolled loads.
Section 4 incorporates the problem constraints involving battery charge dynamics, and
Section 5 extends the the graph framework to account for differences between day and night operations.
Section 6 translates the rate schedule used for billing into an objective function. Finally,
Section 7 and
Section 8 present results and describe future work, respectively.
3. Graph-Based Problem Formulation
This section formulates the charge problem as an optimization problem where the variables are defined in a graph. The first subsection describes the intuition behind this graph-based approach, and the second develops a series of equality and inequality constraints resulting in a mixed-integer linear program (MILP).
3.1. Graph Formulation
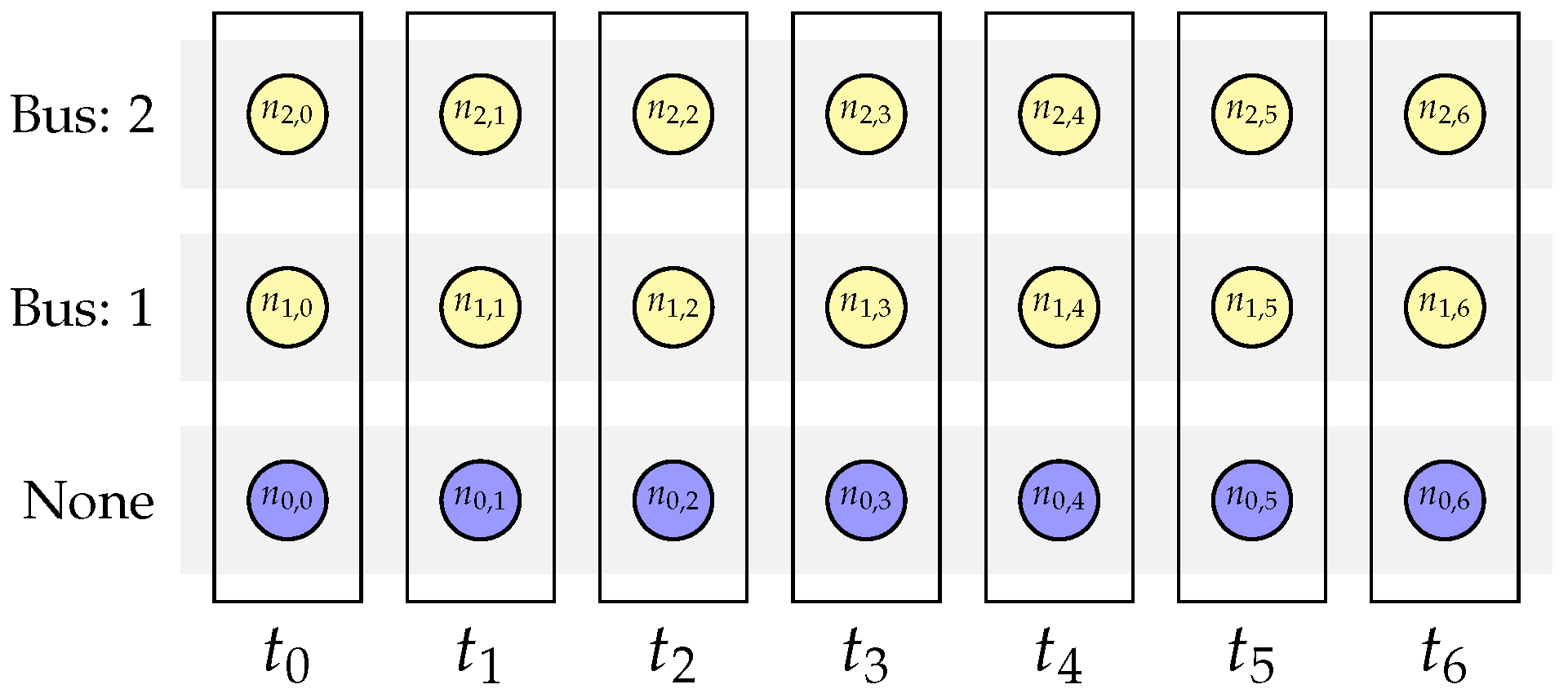
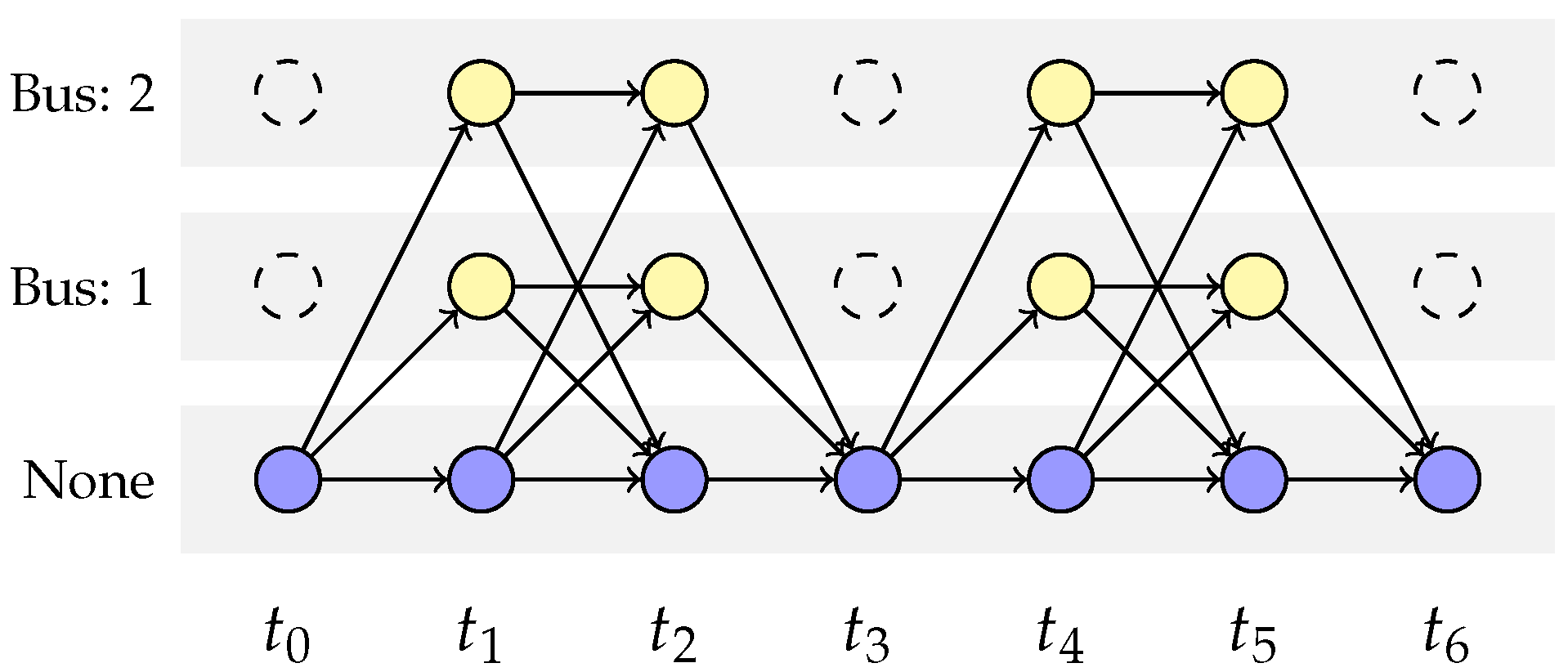
A solution to the bus charge problem is a schedule of actions for charging equipment. A schedule states both when and to which bus a charger should connect, suggesting a model with two dimensions. The first dimension represents time and is given discretely in a left to right fashion. The second dimension encodes the charger state and extends vertically as shown in
Figure 1. The charger may be in one of several possible states. For example, it may be connected to one of the
N buses, or it may be unconnected, giving a total of
different states. This (time, state) 2-D representation is encoded as a rectangular grid of nodes. Node
represents the charger in the
ith state during the
jth time index (see
Figure 1). For example,
from
Figure 1 represents a state where a charger is connected to Bus 1 at
.
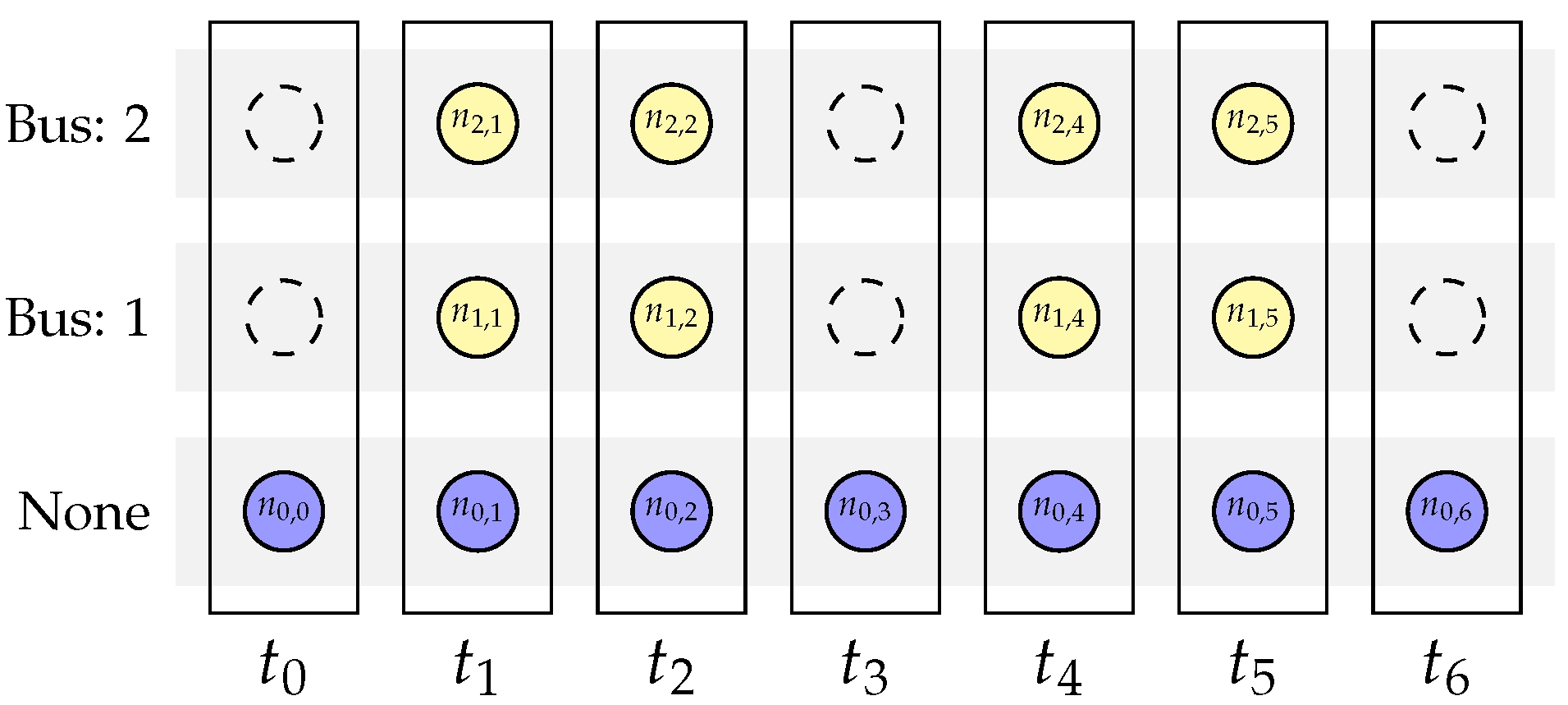
We want the grid of nodes to encode the times at which each bus is at the station and available for charging. Therefore, let a node be present in the grid when the corresponding bus can connect to a charger, and delete nodes from the grid when a bus is away from the station. Consider the two-bus scenario from
Figure 1, where buses 1 and 2 are away from the station at
,
, and
. The schedule is encoded by removing
,
,
,
,
, and
to reflect the grid shown in
Figure 2.
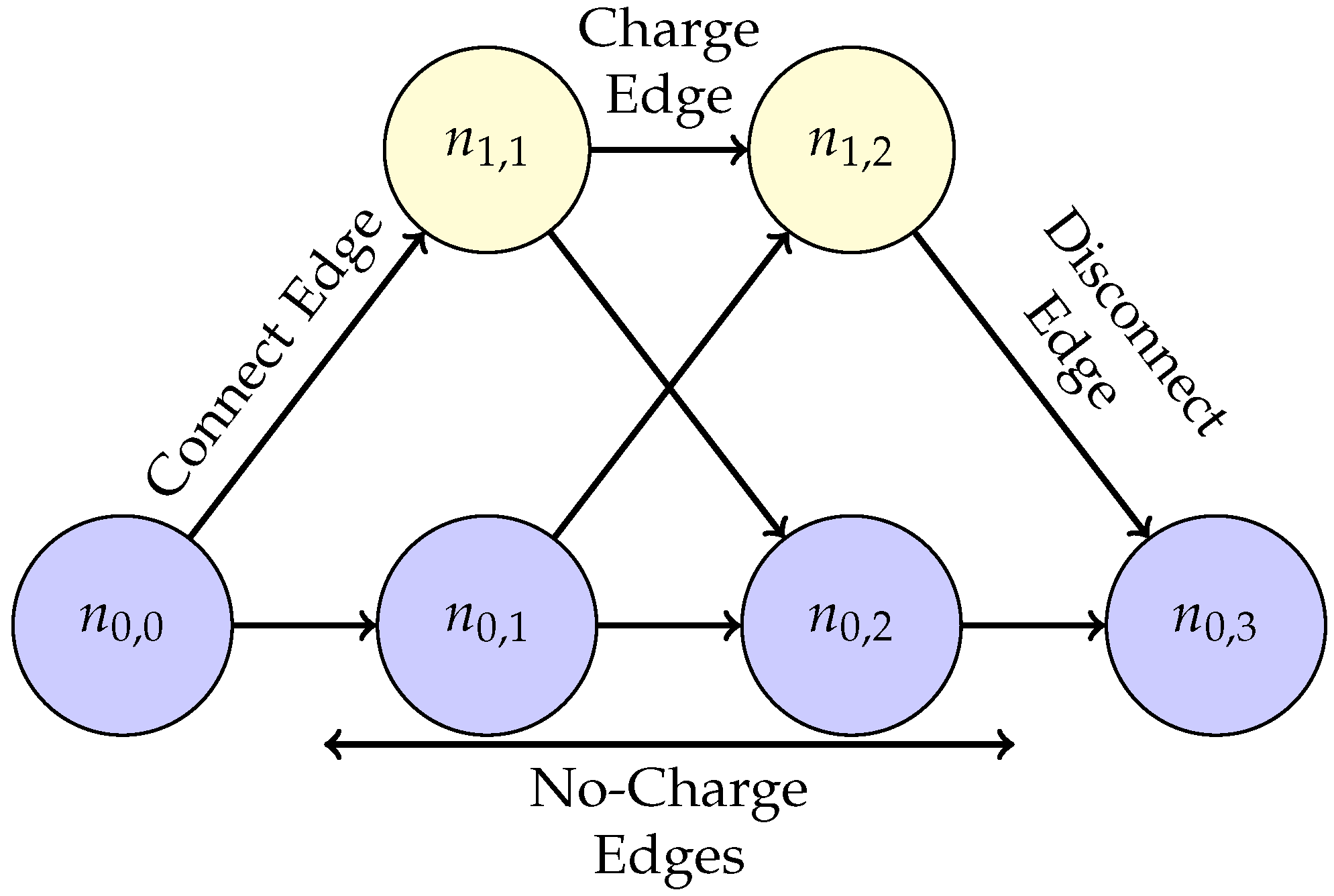
The state of a charger at any time is represented by existing in a particular node. Changes in charger state over time are represented by the transitions from a node to multiple possible next nodes. These transitions are called edges (see
Figure 3) and represent four possible decisions: connect to a bus, charge a bus, remain idle, or disconnect from a bus. Edges are associated with actions, and that action is determined by the nodes on either end. Consider the edge from
to
in
Figure 4. This edge represents a no-charge decision because the nodes on both ends represent the disconnected charge state at times
and
. Chargers cannot charge while disconnected, so the edge decision is no charge. Similarly, the edge between
and
indicates a decision to charge, as both
and
represent states where a charger is connected at times
and
. Both to-charge and no-charge decisions are represented by horizontal transitions in the graph and only reflect the passing of time, as no changes to the physical hardware are made.
Conversely, diagonal transitions imply physical hardware changes because they represent decisions where chargers connect to or disconnect from a bus. One such example from
Figure 4 includes the edge from
to
. The state represented by
is disconnected. This edge represents an interval where a charger is disconnected at
and connected at
, implying a ‘to-connect’ decision. The same logic applies in reverse for the edge between
and
. Hence, the bus charge problem can be described in terms of nodes and edges (i.e., a graph) where nodes represent bus availability for charging and edges encode all possible charge decisions.
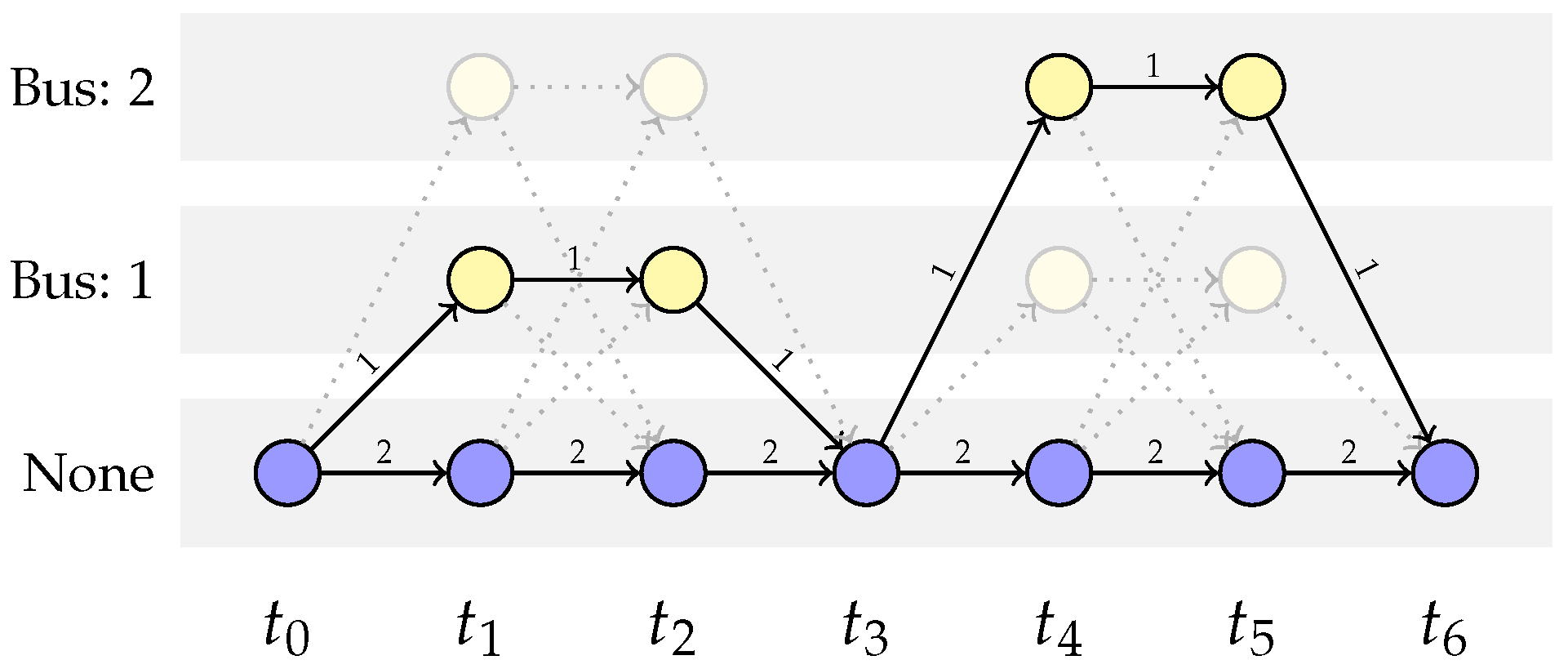
A charge schedule can be thought of as a list of charge decisions that govern charge behavior. Because decisions are represented by edges in the graph, a schedule is also represented by a sequence of connected edges that form a path through the graph. If an edge is selected, or active, it is considered part of the path. Active and inactive edges are represented edge weights equal to 1 and 0, respectively.
A graph with binary edge weights can only represent a plan for one charger. This representation can be expanded to represent an arbitrary number of chargers by using integer valued weights, where each weight gives the number of chargers in the transition.
Consider a three-charger scenario using the graph in
Figure 5. A solution where one charger is connected to Bus 1 from
to
and to Bus 2 from
to
would be expressed by assigning unit weights to the appropriate connect, charge, and disconnect edges. The second charger remains idle as illustrated by the active edges along the bottom row of charger states (see
Figure 6).
In summary, the graph encodes bus availability with nodes, decisions with edges, and schedules with edge weights. Solving the bus charge problem becomes a matter of finding the optimal set of edge weights, where optimal is meant to denote the most cost-effective charge plan.
3.2. Graph Constraints
Finding the optimal charge schedule can be expressed as an optimization problem, where the graph is used to derive equality and inequality constraints for a mixed-integer linear program (MILP)
where the equality and inequality constraints are encoded in
F,
,
Q and
. The variable
is a vector containing the elements of the solution and has the form
where
, and
represent the edge weights of the graph, the bus state of charge, the changes in the state of charge, the energy used, the average power at each timestep, the maximum off-peak power, and the maximum on-peak power, respectively. Each variable will be defined as unknown elements in a mixed-integer linear program and will receive greater attention throughout this paper.
This subsection formulates two sets of constraints. The first represents the graph structure, enforces the conservation of chargers, and defines the number of chargers through a set of net-flow constraints. The second prevents the charger from thrashing between connected/disconnected states and enforces one-bus/one-charger connectivity by enforcing what we call “group flow” constraints.
3.2.1. Net-Flow Constraints
Network flow constraints are expressed in matrix–vector form as
where
A is the graph incidence matrix,
is the
vector of edge weights and corresponds to
in Equation (
2), and
is
and equals the difference between incoming and outgoing edge weights, or
net-flow. The parameter
is the number of edges, and
is the number of nodes.
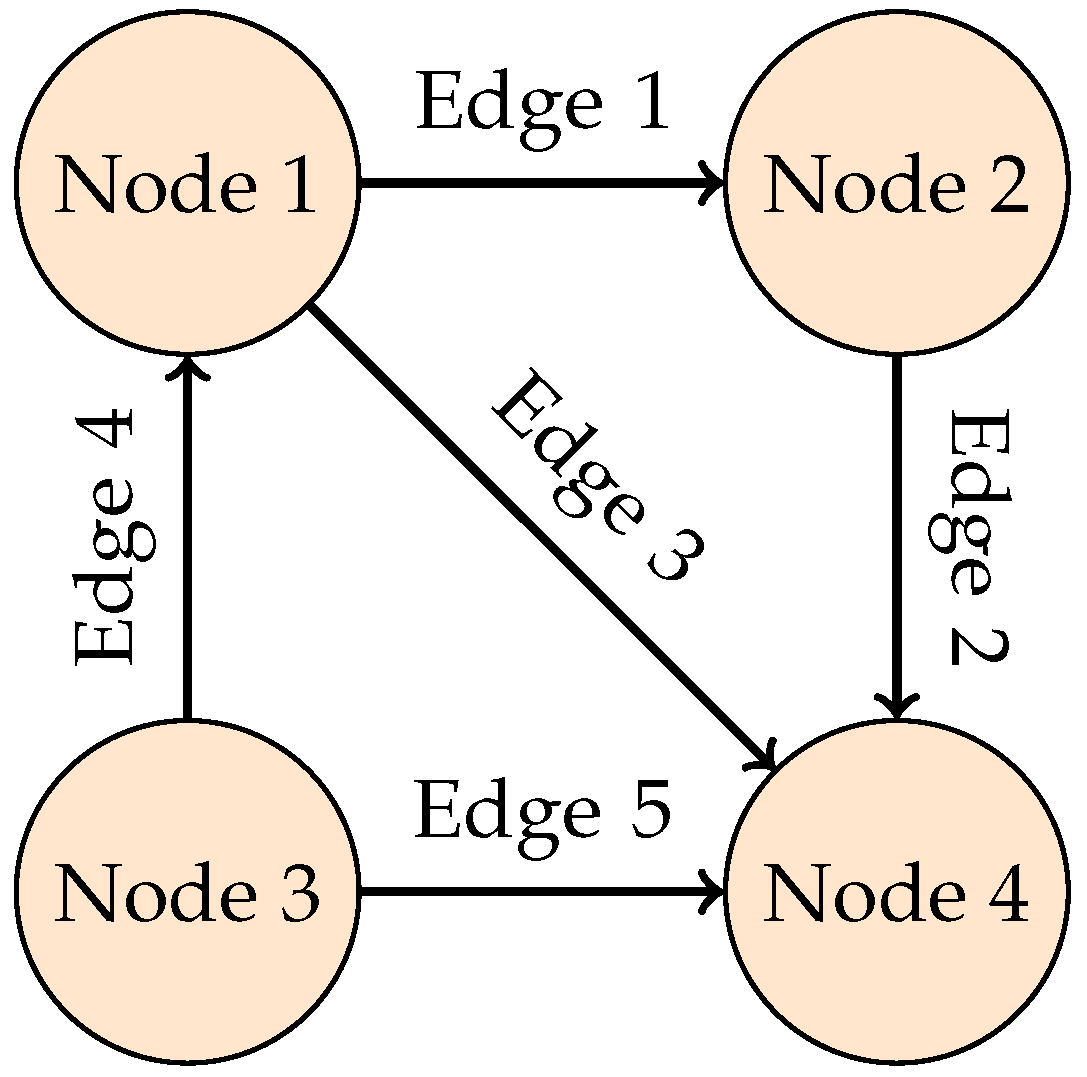
An incidence matrix organizes relationships between nodes and edges by describing which edges leave and enter which nodes. The matrix
A is an
matrix and expresses incoming connections between the
node and
edge by
. Similarly, outgoing connections are given by
, and no connection with
. For example, the graph in
Figure 7 is represented as follows.
The difference between the number of chargers entering and leaving, or the net-flow, can be expressed in terms of
A as seen in Equation (
3). Because the number of chargers does not change, the number of chargers entering and leaving a node must be equal. This is expressed in linear form as
, where
is the
ith row of
A. The only exceptions occur at source and sink nodes.
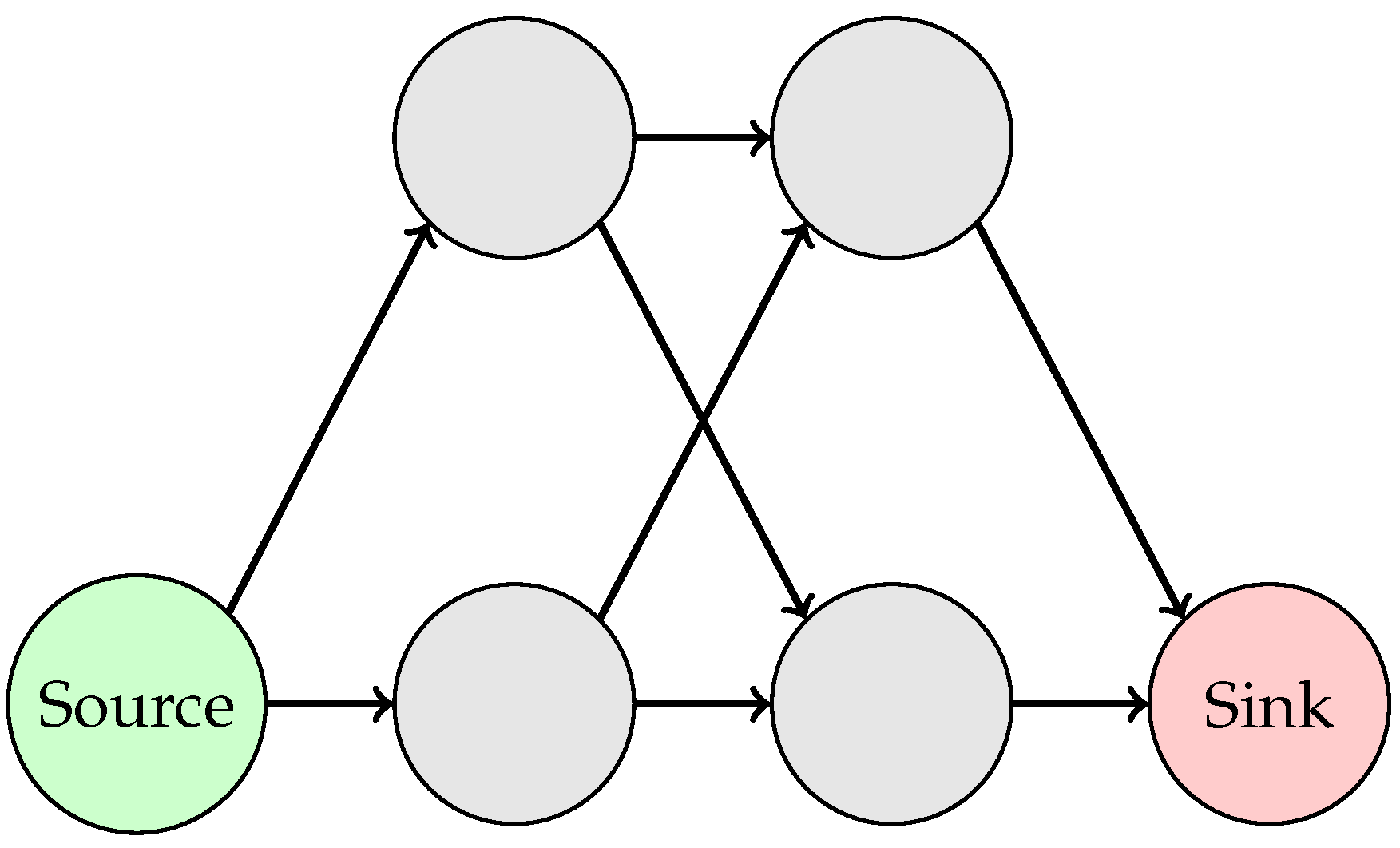
A source node represents the beginning state for all chargers. Because edges originate here, there are no incoming edges, and the net-flow will be minus the number of chargers. This is described in linear form as , where is the number of chargers.
Sink nodes represent the final state, where all edges terminate (see
Figure 8). Because sinks have no outgoing edges, they maintain a positive net-flow equal to the number of chargers and is expressed by
.
Therefore, the flow constraints require the elements of
to be equal to zero for all non-source and non-sink nodes as seen in Equation (
5):
Equation (
5) can be formulated in terms of
by appropriately zero-padding
A such that
3.2.2. Group Flow Constraints
Another flow type, known as group flow, can be used to regulate the number of chargers entering a set of nodes. This is desired for two reasons. First, it prevents chargers from connecting multiple times during an interval when a bus is available for charging, and it limits the number of chargers connecting to a bus to be one at most.
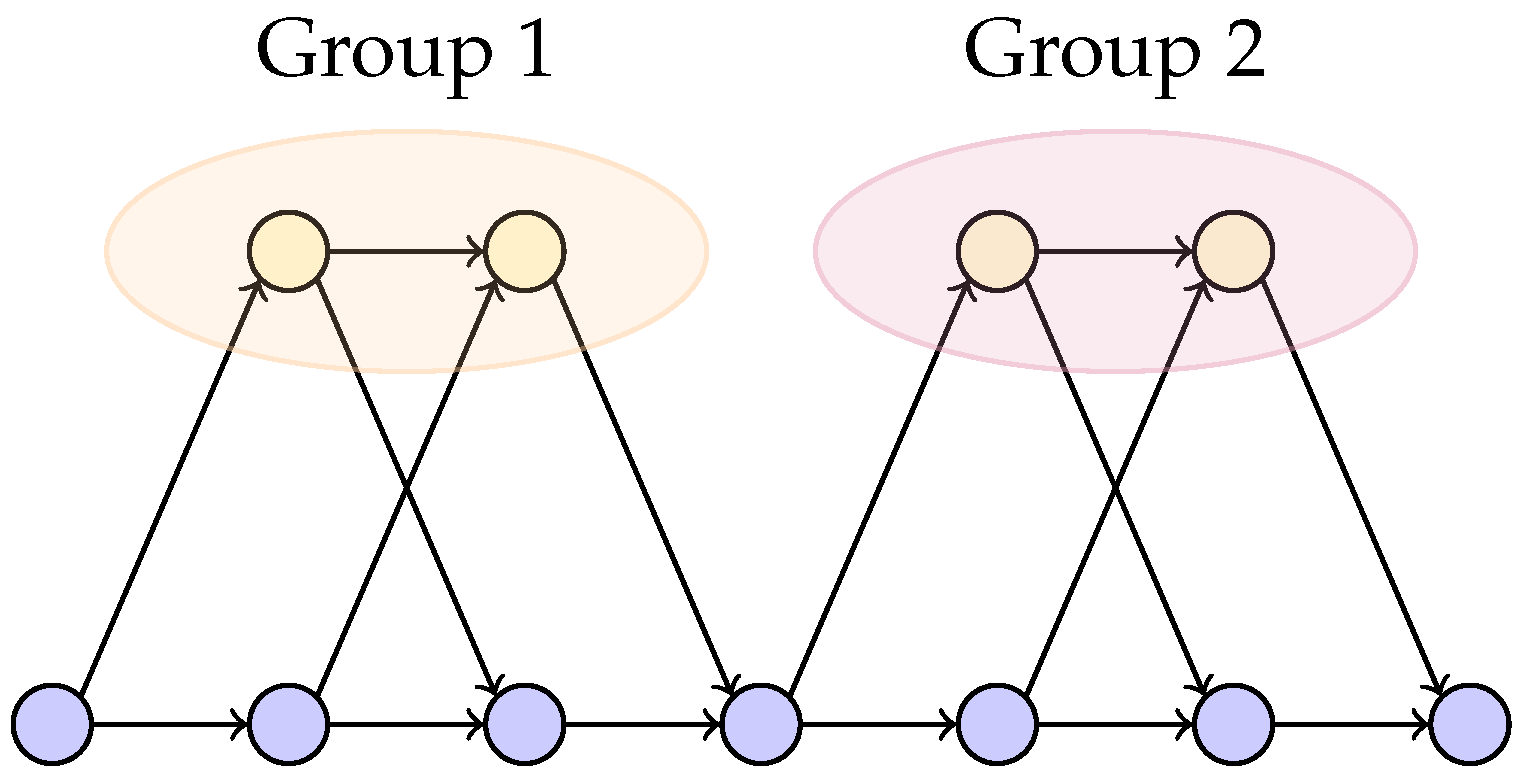
Define a charge group as the set of all nodes for a given bus corresponding to one station visit as shown in
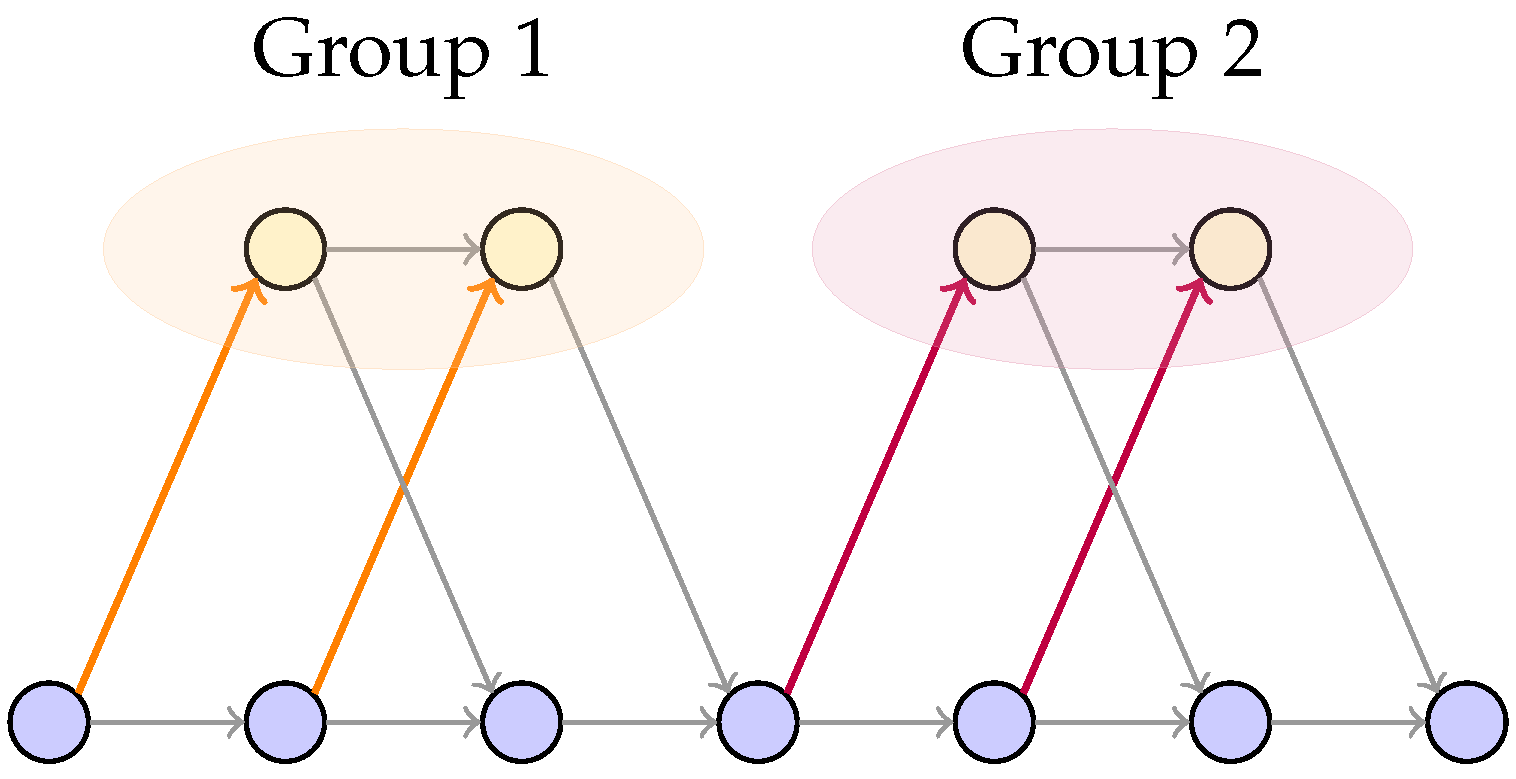
Figure 9. The group flow is the number of chargers that enter a group and is represented as the sum of all incoming edge weights (see
Figure 10).
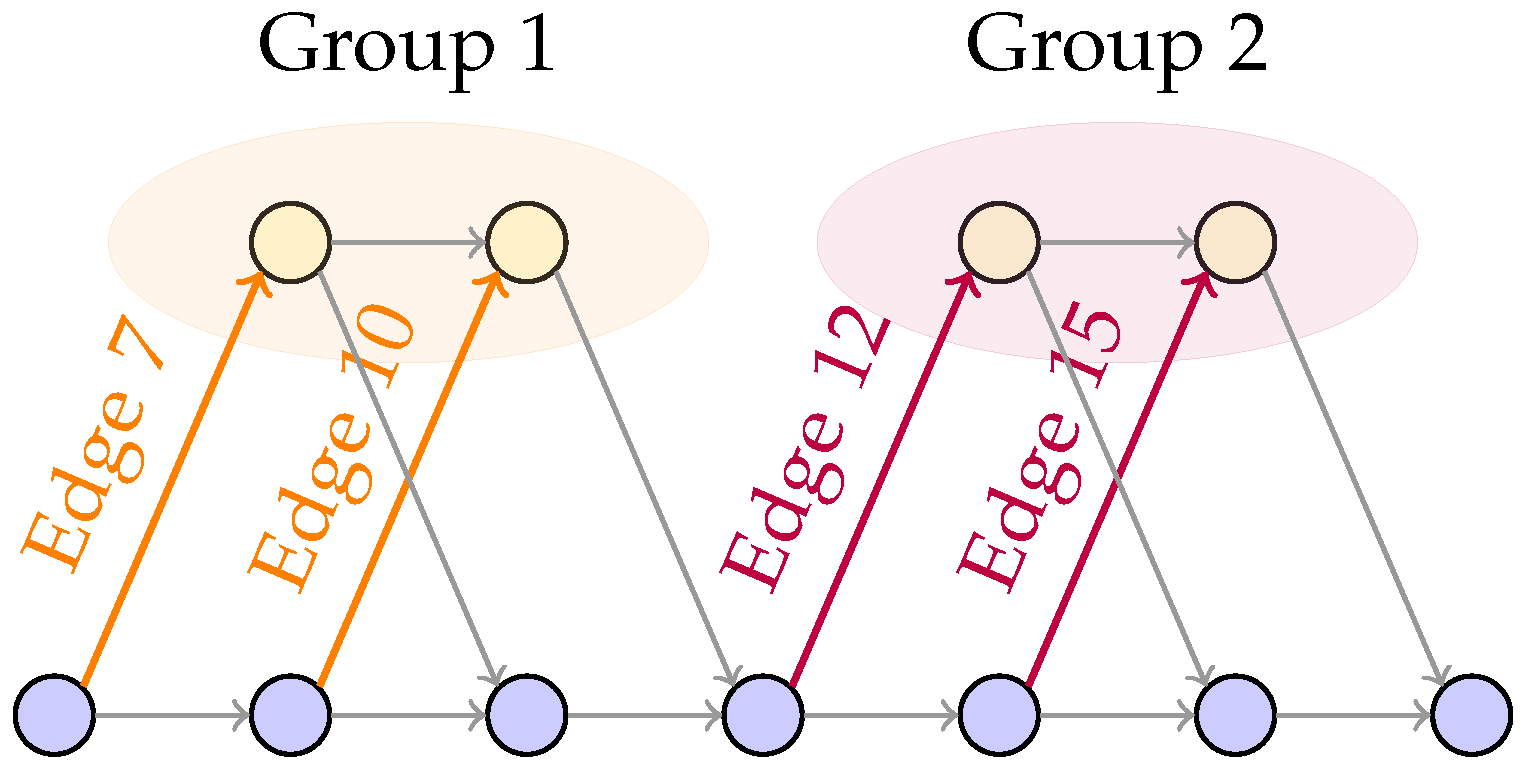
Denote the
group incidence matrix as
B, where
is the number of groups and
is 1 if the
jth edge enters the
ith group and 0 otherwise. For example, the group incidence matrix corresponding to the graph in
Figure 11 contains 1 in the 7th and 10th columns for Group 1, and the 12th and 15th columns for group 2 as given in Equation (
7) so that
Let
be the edge weights as before and
be an
vector, where the
ith element gives the group flow for group
i. The group flow is then computed as
Note that group flow is required to be one at most to avoid connection thrashing. This is expressed by the inequality given in Equation (
9):
Similarly to (
6), Equation (
9) can also be expressed in terms of
with appropriate zero padding as
so that
3.3. Section Summary
In summary, the bus charge problem can be formulated as a graph with nodes and edges, where charge plans are encoded as a path with unit edge weights. The charge problem aims to find a feasible path which minimizes the cost of power. Feasibility is defined through a set of net-flow and group-flow constraints. Net-flow constraints are encoded through an adjacency matrix and enforce both the conservation and total number of chargers. The group-flow constraints prevent connection thrashing and limit to one the number of simultaneous charger-to-bus connections.
4. Battery State of Charge
The battery state of charge (SOC) plays a central role in the bus charge problem because a charge plan must ensure that all buses are adequately charged throughout the day. Therefore, the charge decisions must account for buses with lower SOC values and higher discharge rates along their respective routes. This section presents a formulation for tracking the expected SOC for each bus and imposes constraints on the optimization framework so that the SOC for each bus is guaranteed to exceed a minimum threshold throughout the day. Additionally, this method is run over a 24 h period, and the results are extrapolated to anticipate the cost over a month. Therefore, additional constraints are given so that buses begin and end each day with the same SOC.
A SOC thresholding constraint requires that battery charge levels be modeled. The
kth SOC for bus
i is denoted
, where
k is the
node index. The node indices used here are not directly tied to specific timesteps. For example,
represents the bus SOC at the node in the graph following the node where
is the SOC as seen in
Figure 12. The set of all
can be organized as the vector
from Equation (
2).
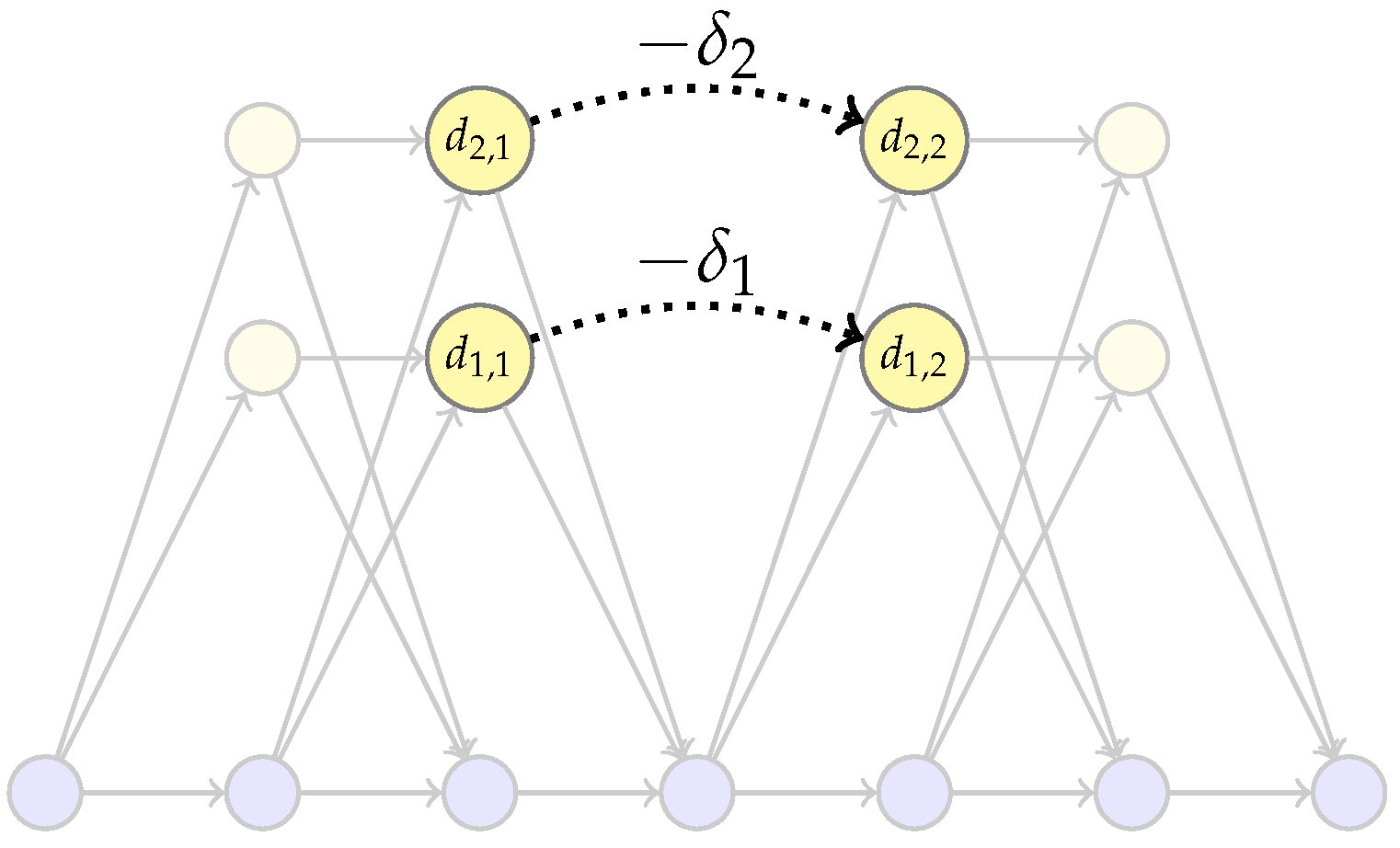
Because no charging is performed while on route,
will assume its lowest value when buses enter the charge station. Let
be the charge level for bus
i as it enters the charge station, and
represent the power discharged while on route. The entrance SOC can be expressed as
where
is the previous departure SOC for bus
i. Consider the example in
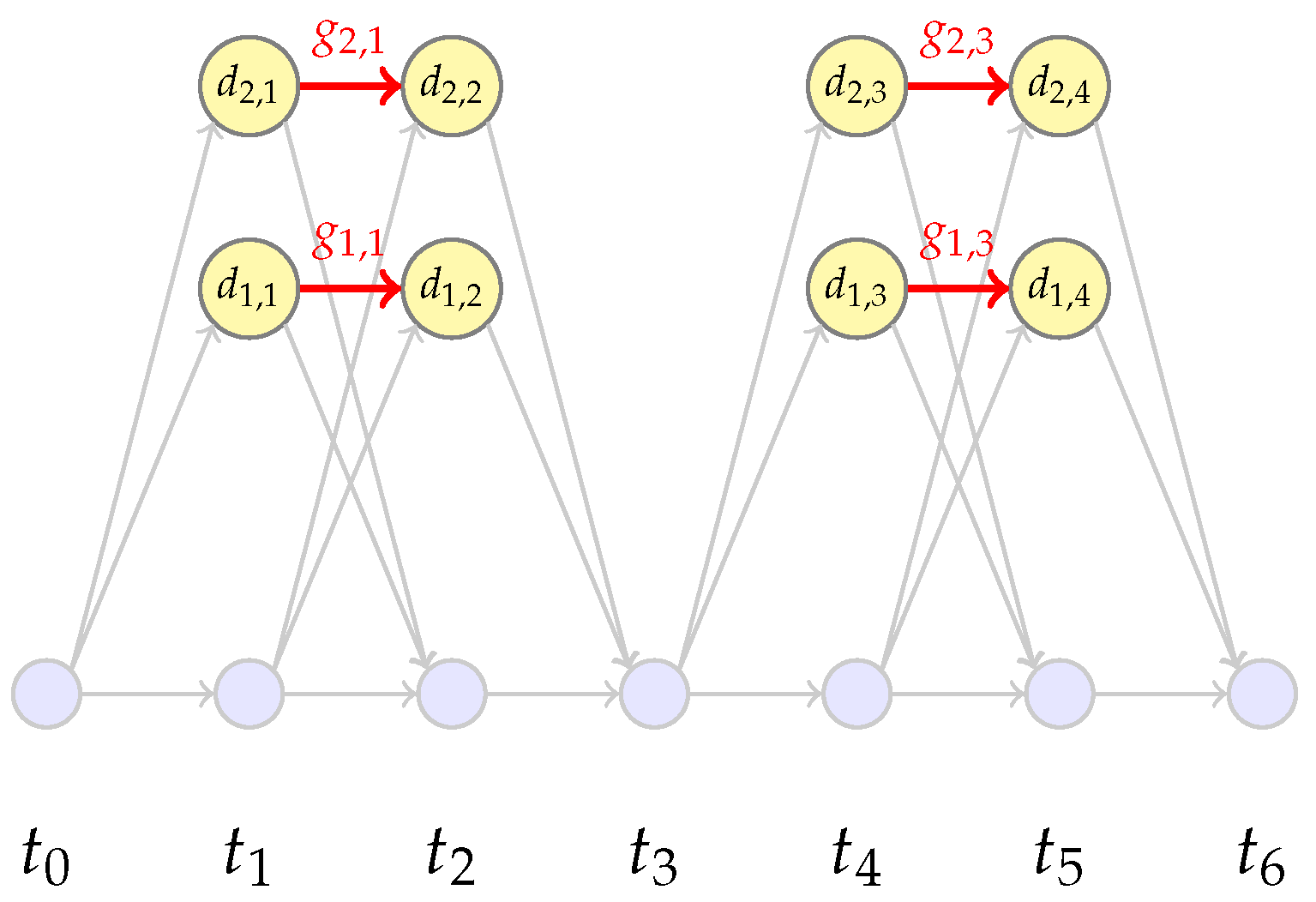
Figure 13, where buses 1 and 2 leave the station at
and enter at
. The corresponding change in SOC is given as
and
for buses 1 and 2, respectively.
The constraints from Equation (
12) can be expressed in linear standard form as
Equation (
13) can be expressed in terms of
with appropriate zero padding and expanded to account for the decrease in SOC for all buses outside the station. The expanded constraint is given as
where
and
represent
and 1 in locations corresponding to
and
, respectively. Similar notation will be used throughout this paper as a means to imply a corresponding index for other variables.
Time periods between entrance and exit nodes represent the time spent in the charge station and have the potential to charge the battery. An edge over which charging occurs is referred to as
, where
k gives the index of the edge’s outgoing node, and
i refers to the bus. When a charger occupies
, the resulting increase, or
gain, in battery charge is denoted as
, where
i and
k mirror the edge indices (see
Figure 12).
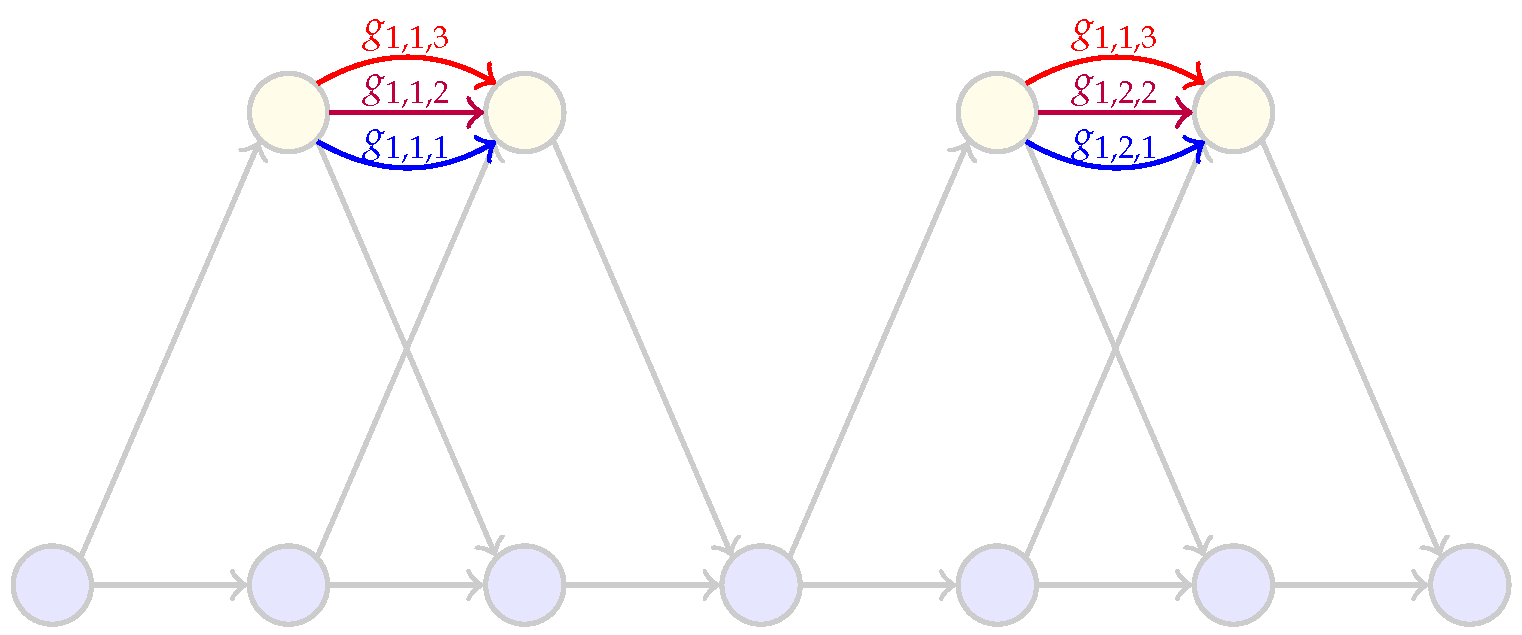
The value for
is computed using a single charge rate. Multiple charge rates can be encoded by connecting bus nodes with multiple edges, denoted
, where each edge has a distinct charge rate and gain denoted
(see
Figure 14). Having multiple charge rates gives the option for fast charging when necessary and slow charging when possible to preserve battery health and decrease the electrical load [
37].
The rate is selected by setting
. All gains associated with unselected rates are set to zero. Gains that correspond to selected rates are computed using the constant current constant voltage (CCCV) model as derived in [
28], which gives:
where
depends on the charge rate and is experimentally determined,
M is the battery capacity in kWh, and
. Equation (
15) is used to show that
but the gain is equal to the difference in
and
such that
. So
Therefore,
The conditions given in Equation (
18) can be rewritten as
where
M is the battery capacity. The results of Equation (
19) obtain a switching effect. When
, Equation (
19) becomes
The active constraints imply equality for
=
. The inactive constraints imply that
is greater than zero and less than the battery capacity, which are trivially satisfied. When
, Equation (
19) becomes
where the inactive constraints are again trivially satisfied, and the active constraints imply equality for
.
Equation (
19) can be expressed in standard form as
and in matrix form as
Equation (
23) can be expanded to include constraints for all
. Because each value for
,
, and
is an element of
, the constraints from Equation (
23) can be written as
The value of
can be expressed as
or
because a non-zero element of
is only present for one corresponding
l. This relationship is described in terms of an equality constraint such that
Equation (
27) can be appropriately zero padded to give
and expanded to define the values for all
as
The values for
are defined with initial SOC conditions with additional equality constraints denoted as
such that
or
Once all values for
are computed, they must be constrained to remain above threshold
. The SOC thresholding constraint can be expressed as an inequality constraint such that
Equation (
32) can be expanded to a matrix
, where each
contains a corresponding constraint row such that
In summary, the minimum SOC for all feasible charge plans must exceed a given threshold. SOC values are computed while the bus is in the charge station. SOC values are updated when a bus enters by subtracting the discharged energy from the previous SOC estimate. SOC values are updated for in-station periods by adding the charge gains as given in Equation (
25). Gains are computed using a switching constraint, which sets them to zero when not charging; otherwise, they follow the CCCV model as set forth in Equation (
17). Initial SOC values are handled with the equality constraint given in Equation (
31), and the SOC is constrained to remain above the threshold
in Equation (
33). All constraints for
d can be concatenated such that
and expressed as
5. Multi-Graph Additions
An additional contribution this work offers is the expansion to the joint optimization of both night and day charging in a single optimization problem. Day and night operations differ in two aspects: number of chargers and bus availability. During the day, the buses can charge only at the charge station. The number of chargers in the station are limited, causing contention between buses. At night, each bus docks in a holding stall with one charger per stall, eliminating charger contention. Furthermore, nighttime charging is slow compared to daytime charging. Our model uses different rates for day and night charging.
Bus availability also changes because buses do not leave their stalls at night. This simplifies the charge problem because buses are always available for charging.
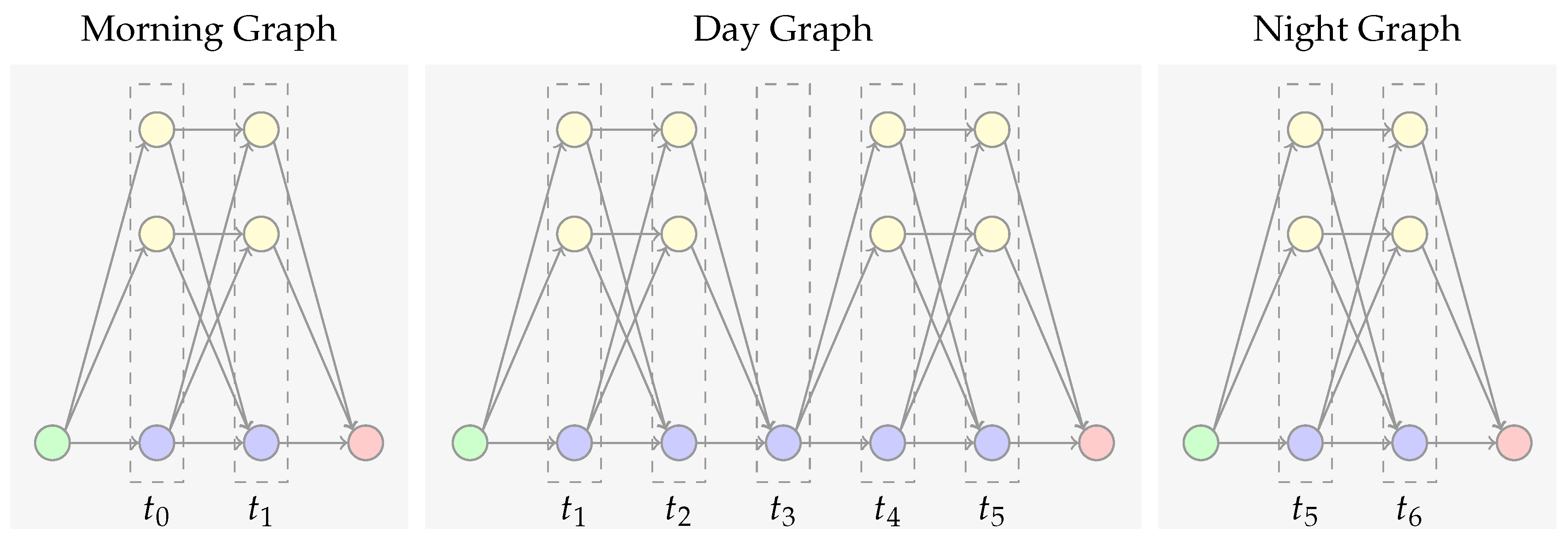
Equation (
5) in
Section 3.2.1 describes the net-flow constraints which constrain the number of chargers in the source and sink nodes. Because the number of chargers are different from night to day, a separate graph is used at each transition as shown in
Figure 15.
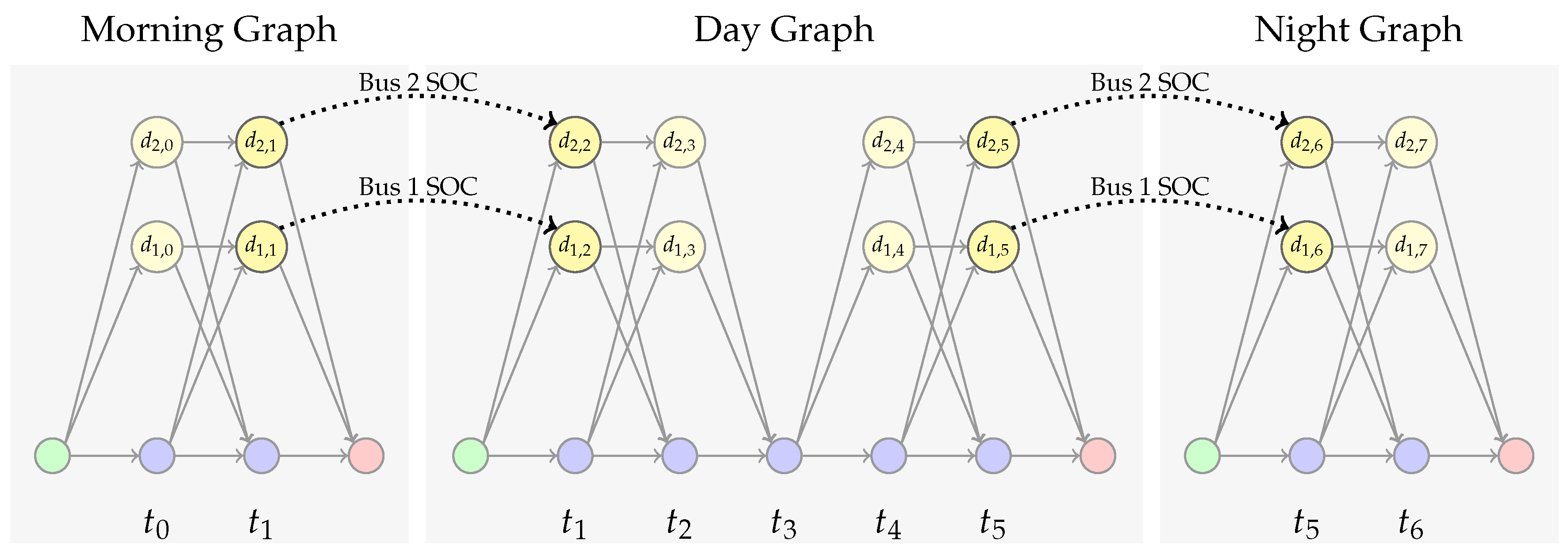
Each graph is connected by equating the appropriate SOC values. Consider the multi-graph formulation given in
Figure 16. The morning graph is related to the day graph because
and
represent the same SOC values as
and
, respectively. The same applies for the day and night graphs, where
and
represent the SOC values for
and
. This equality relationship can be expressed as an equality constraint where
or by
where
is an
matrix such that
Because all SOC values d are contained in , forming the matrix D amounts to placing 1 and at the indices corresponding to and , respectively, and zero otherwise.
7. Results
This section discusses the results for applying the proposed method at the Utah Transit Authority station in Salt Lake City, Utah, (UTA). The UTA currently maintains a day-charging station located at a central bus depot, which serves as the singular charge point for BEBs and contains a limited number of “Fast-Chargers”. At night, each BEB is taken to a stall, where the BEB is connected to a “slow-charger”. We collected historical data that provide insight into the external loads which are present on the grid during a 24 h period, and introduced these data as a model for the “Uncontrolled Loads”. We are particularly interested in observing performance as the number of day chargers become scarce because their installation requires a significant financial investment. Furthermore, UTA also plans to increase their fleet size, and so we also look to see how the monthly cost of energy scales as the fleet size increases. We also compare the proposed method against two other charging paradigms. The first models how a traditional bus driver might behave in the absence of a centralized coordinator, and the second is an optimization solution from the current literature, which focuses on minimizing the instantaneous load on the grid. This section contains the results of the planning framework and is subdivided into three subsections: uncontested results, contested results, and multi-rate comparisons.
7.1. Baseline and Setup
The experiments in this section compare the results of the framework given in Equation (
55) with a baseline that models the general behavior of bus drivers at the Utah Transit Authority (UTA) in SLC, Utah and the planning framework from [
29]. All methods use a MILP to find an optimal solution and are solved up to a 2% gap using Gurobi [
38]. Model parameters such as
, arrival, and departure times were computed from historical data provided by UTA.
According to UTA, bus drivers generally charge whenever possible. Our baseline scenario reflects this default bus driver behavior using an objective function that maximizes the number of charging instances, which is computed as the sum of group flow values, resulting in the objective function
All other constraints are the same, which results in the baseline formulation
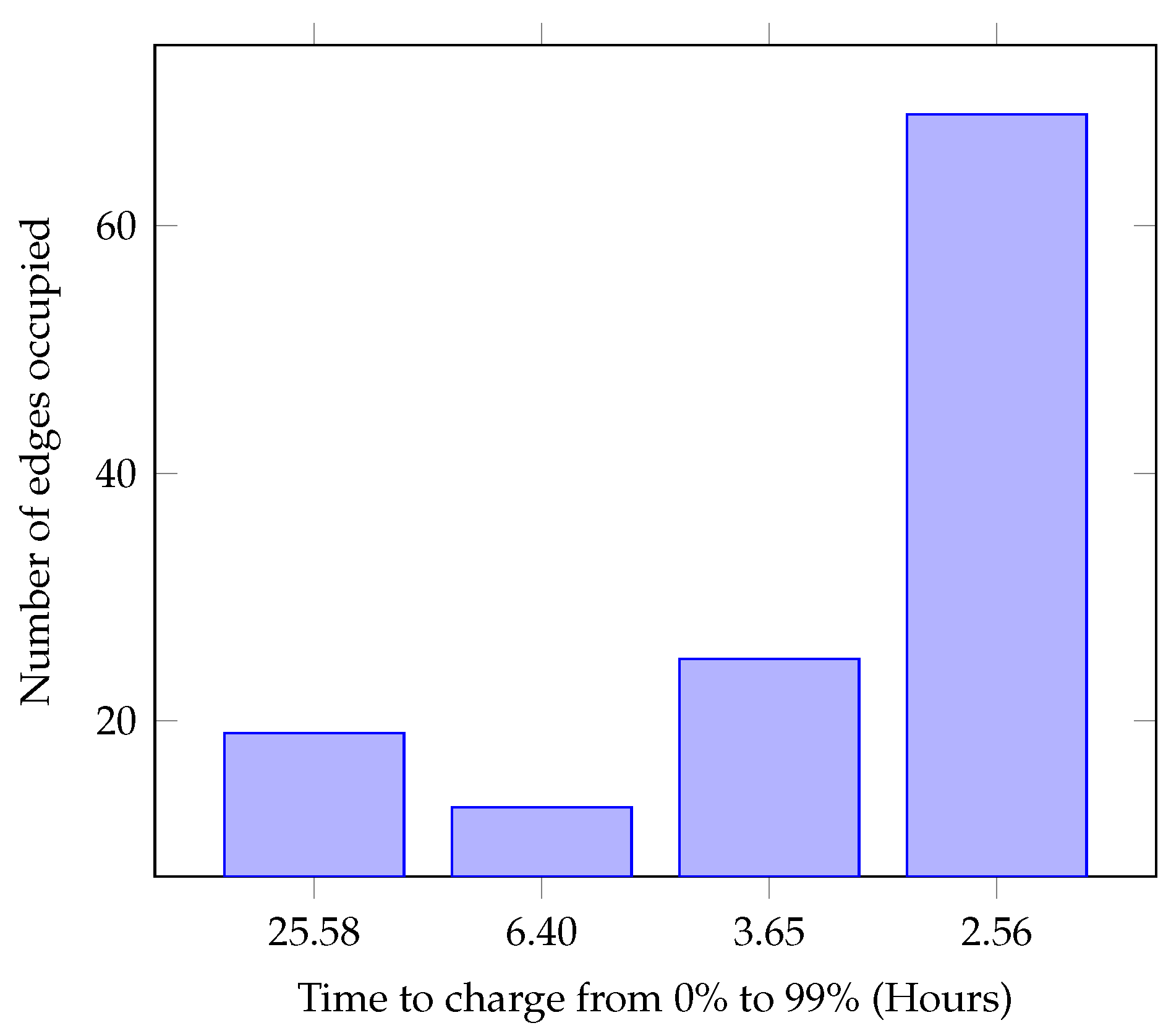
Each experiment is run using a five minute timestep such that the time difference between and is five minutes. Four charge rates are used during the following experiments: , , , and . Each value for represents a different charge rate and is referenced by how much time it would take a bus to charge from 0% to 99%. For the rates used in the following set of experiments, a bus would need 25.58 h to charge from 0% to 99% with , 6.4 h with , 3.65 with , and 2.56 with .
Night charging uses a single charge rate of for all experiments. Experiments with single-rate day charging use , and multi-rate experiments incorporate four charge options: , , , and .
Uncontrolled loads are modeled with data from the TRAX Power Substation (TPSS) at the UTA Intermodel Hub site in Salt Lake City. It is also assumed that each bus starts and ends each day with an SOC of and has a maximum charge capacity of 100 kWh.
7.2. Uncontested Results
This section explores performance in a scenario where there is one charger per bus during the day, making charge resources
uncontested. The optimal charge schedule associated with Equation (
55) is compared with the schedule developed by the baseline in Equation (
57). The total monthly cost is computed using the rates given in Rocky Mountain Power Schedule 8 and is computed in Equation (
58):
There is also a customer service charge of in the rate schedule, but because the service charge does not depend on a customer’s behavior, it is ignored.
Because Equation (
58) is driven by facilities power, on-peak power, on-peak energy, and off-peak energy, these four criteria are used to evaluate the optimal and baseline charge plans. Furthermore, because the on- and off-peak energy charges contribute little to the cost differences, they are grouped together for comparison.
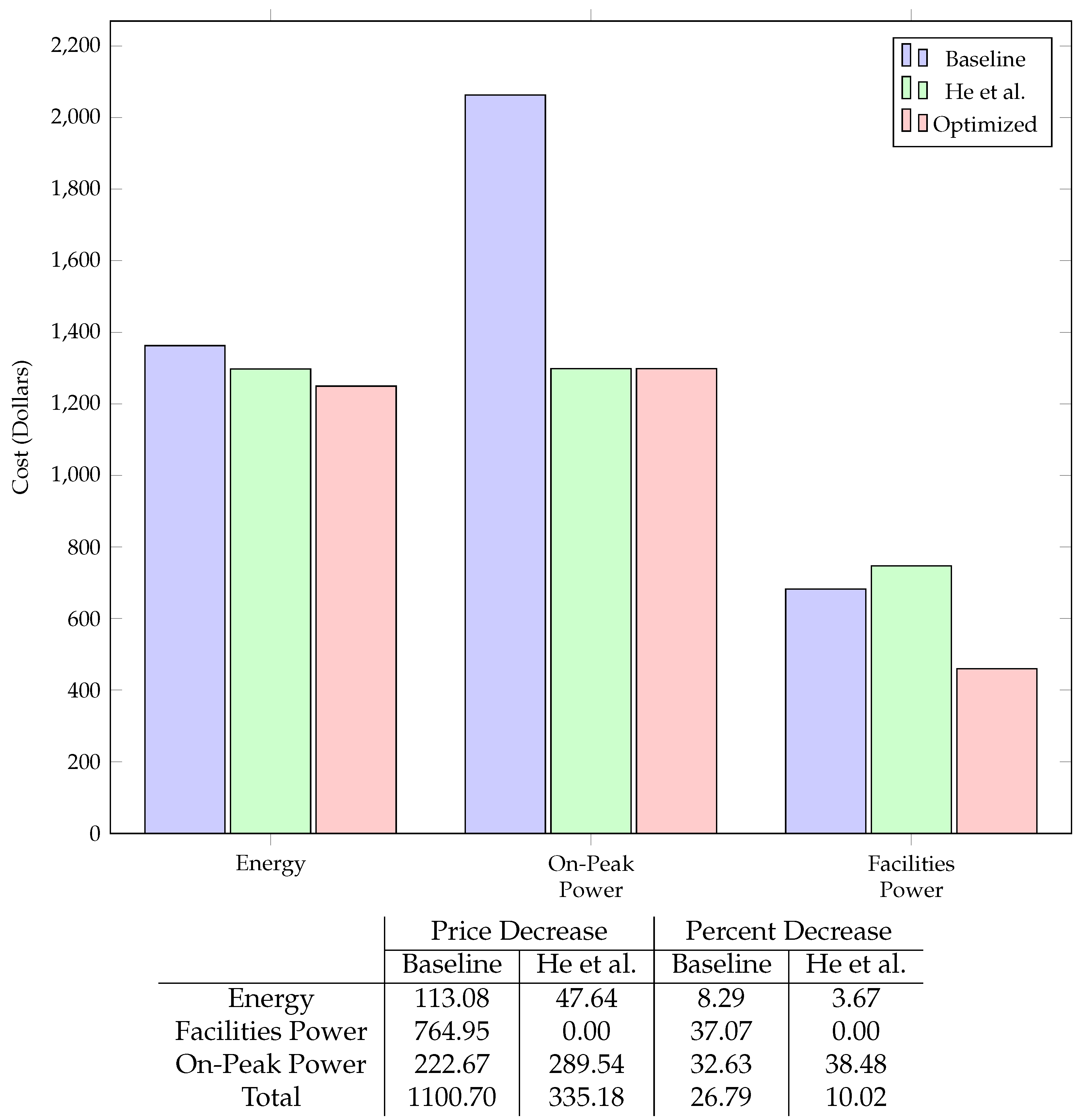
Figure 17 compares the cost of energy, on-peak power, and facilities power for the baseline [
29], and this work’s scheduling strategies. Note how the schedule given by He et al. [
29] is similar in both energy costs and on-peak power charges but is more expensive in the facilities charge. These differences are expected, as He et al. [
29]. minimize the cost of energy by charging during off-peak periods. Because there is minimal charging during on-peak times, the on-peak power charges reflect the uncontrolled loads and are therefore the same. The differences in facilities is present because He et al. do not include the overall maximum average power in their framework.
Additionally, the facilities and on-peak power costs for the baseline schedule are significantly larger than the optimized schedule. To better understand the cost disparity, we observe the load profiles to identify how the optimized schedule avoids the costs incurred by the baseline.
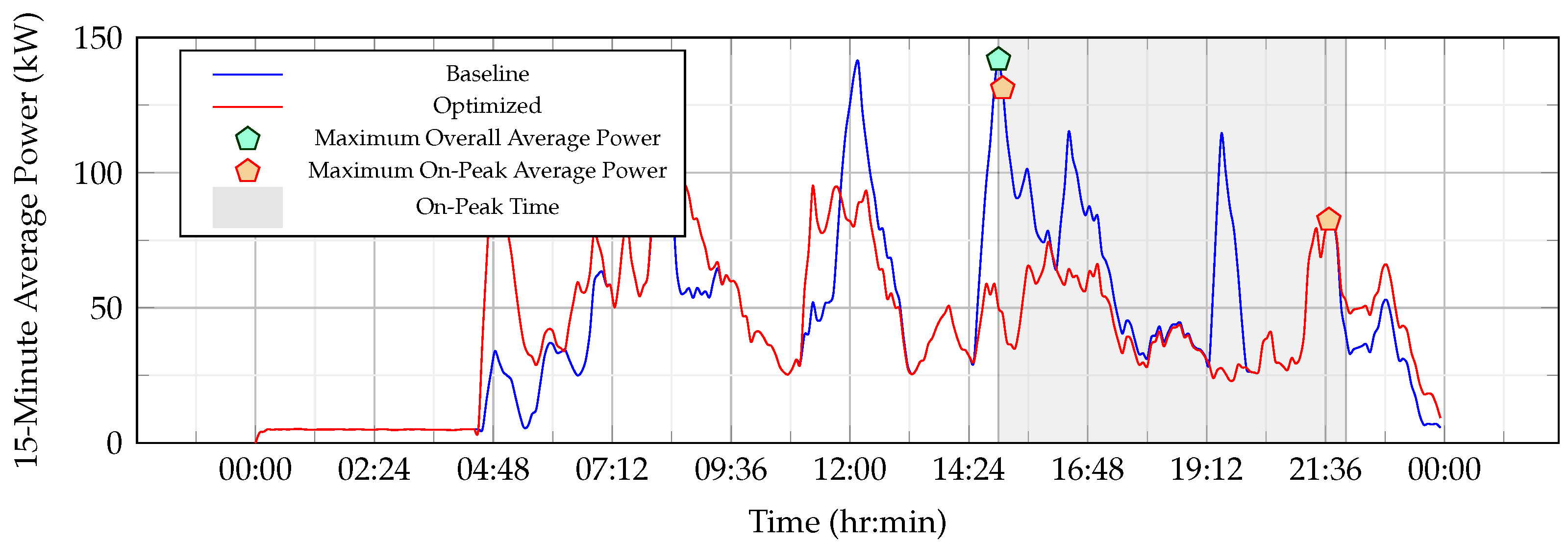
Figure 18 shows the 15 min average power for both the baseline and optimal schedules. Note how the optimal schedule incurs a lower average power for both on- and off-peak time intervals. The reduction in average power is what leads to the cost disparity between the on-peak and facilities power costs in
Figure 17.
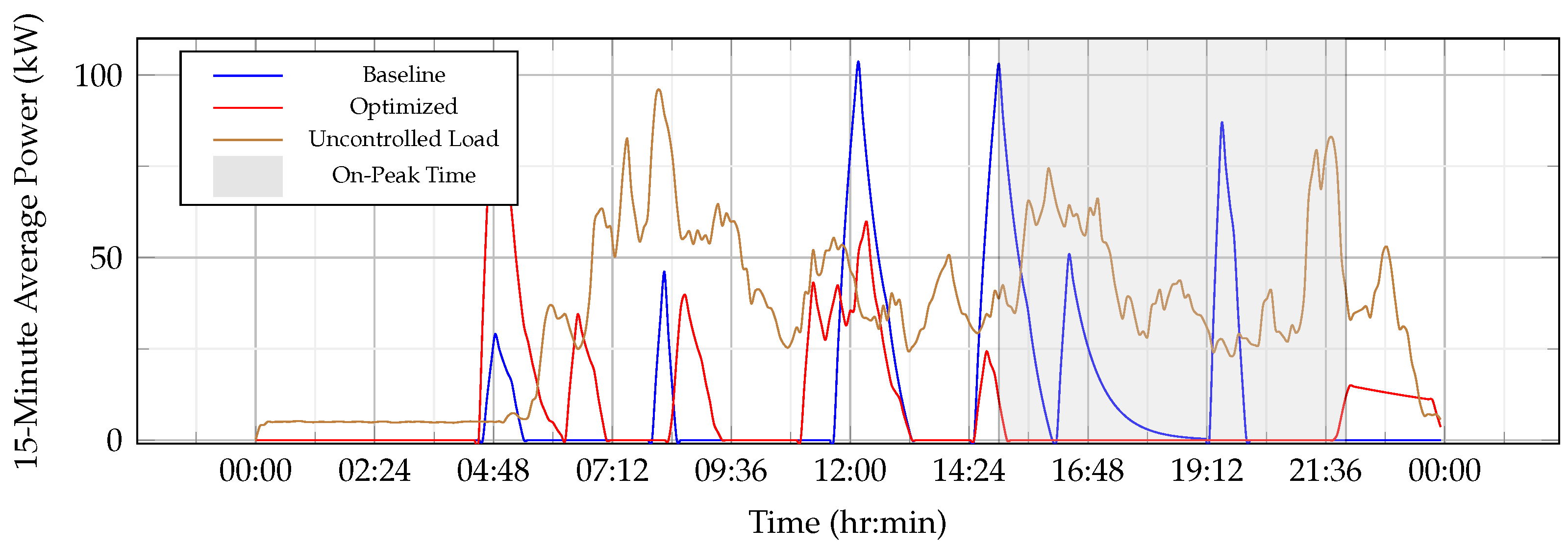
The underlying behavior can be observed in
Figure 19, which separates the loads into their controlled and uncontrolled constituents. Because the uncontrolled loads are shared between both scenarios,
Figure 19 shows the 15 min average power for uncontrolled, optimal charging, and baseline charging loads.
Observe how the optimized schedule avoids charging during on-peak hours and regulates each charge event to spread the power draw over larger periods of time. Furthermore, bus charging is avoided when uncontrolled loads are high, resulting in a reduced 15 min average power. Reducing the average power and not charging during on-peak periods results in the dramatic cost reduction shown in
Figure 17.
7.3. Contested Results
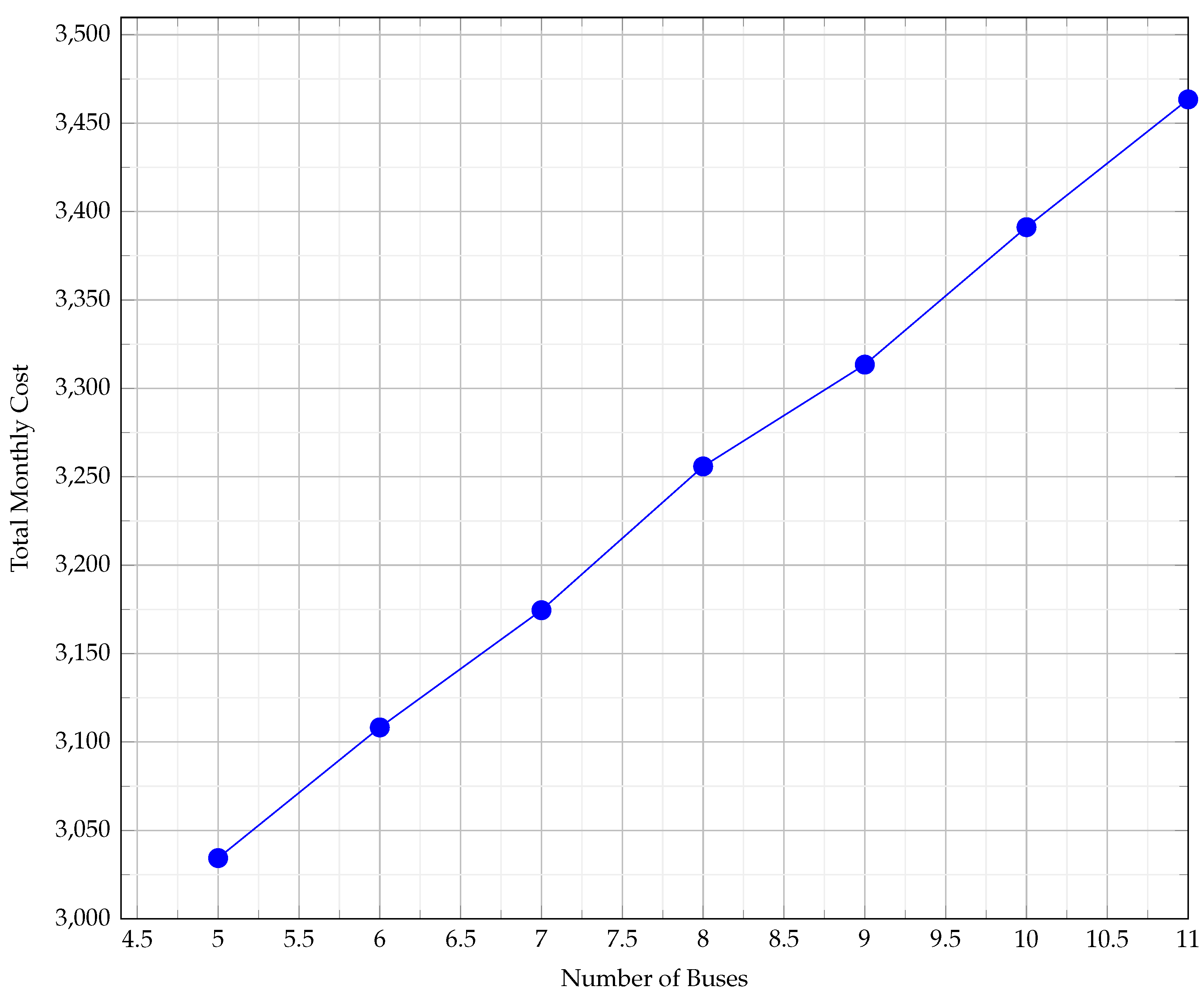
This section observes the performance of the optimal schedule as charge resources become scarce, creating a contested environment. Resource contention is most prevalent when chargers are scarce and pushes buses to charge in non-ideal circumstances. For example, if charging resources are saturated during off-peak hours, other buses might be forced to charge in the on-peak window. The impact of contention is measured as the change in monthly cost when the number of chargers is held constant and the number of buses increases.
In this analysis, one charger is used, and the number of buses is varied from five to eleven.
Figure 20 shows the monthly cost as a function of the number of buses. Note the minimal cost increase per bus, where each successive bus costs around USD
, which approaches the cost of energy that is required to provide transit services. Because the additional cost per bus is roughly the cost of energy, there are no additional facilities and on-peak power charges, showing that optimal charge plans also minimize cost in the presence of contention.
We desire to know how this is achieved.
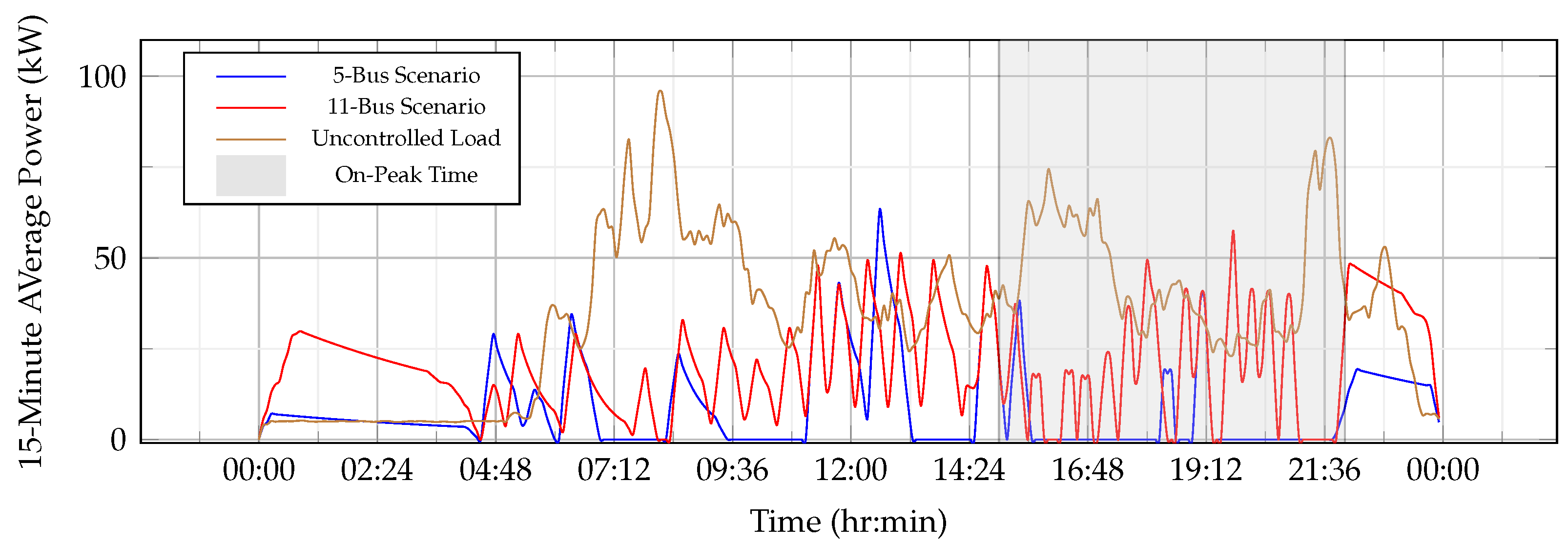
Figure 21 shows the 15 min average power for controlled and uncontrolled loads for a five-bus and eleven-bus scenario. In the 5-bus scenario, loads are easily distributed amongst off-peak hours, resulting in an optimized cost. The 11-bus scenario requires significantly more power and is forced to charge during on-peak hours. Note, however, that the average power is kept relatively low, and the additional charge sessions never cause the average power to supersede the maximum average power of the uncontrolled loads. Both scenarios also make ample use of night charging, where the number of chargers is the same as the number of buses.
7.4. Multi-Rate Comparison
This subsection compares a multi-rate and single-rate charge schedule. The multi-rate schedule includes
,
,
, and
as defined in
Section 7.1. The single-rate schedule assumes the static charge rate associated with
. Two scenarios are considered. The first compares the cost of multi- and single-rate plans for a 5-bus 1-charger scenario. The second compares performance for a 35-bus 6-charger scenario.
The potential savings for using a variable charge rate in a 5-bus 1-charger scenario are found to be negligible. The cost of the multi-rate scenario is USD 3006.94, and the cost of the single-rate scenario is USD 3007.77, which gives a total savings of USD 0.83. A 36-bus 6-charger comparison also yields minimal cost savings.
While examining the most commonly used edges, we observe that edges corresponding to a maximum charge rate are used most frequently as shown in
Figure 22, which explains the similarities in cost. If the highest rate is almost always selected, the resulting plan would resemble a single-rate schedule, resulting in a singe-rate cost.
Another explanation for the cost similarity is found in how monthly cost is computed. Because the monthly cost is based on the average instantaneous power, both high and low charge rates can give the same results over a fixed time period. The charge schedules shown in both single and multi-rate plans charge buses in relatively small time periods. Fast charging over small periods of time is equivalent to slow charging over longer periods. In this way, the average power can be kept low even when using high charge rates (see
Figure 20 and
Figure 21).
8. Conclusions and Future Work
In conclusion, the charge schedules developed in Equation (
55) yield significant cost savings over both the baseline and the work by [
29]. These savings come from minimizing the average power consumption and charging during off-peak hours. Cost savings are maintained in both uncontested and resource-constrained scenarios. There is also little to be gained by offering multiple charge rates because the average power can be managed with high charge rates by reducing the charge duration. Furthermore, it was shown that when given the choice, the optimizer primarily selected high charge rates, which reduces the problem complexity to the single-rate formulation.
In practice, this work demonstrates the feasibility of large-scale BEB conversion with a small number of charging resources. Furthermore, the monthly cost can be made linear with the number of buses so that BEB conversion is scalable even when the number of fast-charging resources is relatively small and the grid is shared with other significant power users. In practice, accommodating other power users allows the transit authority to aggregate their meters, which decreases the cost of the charging infrastructure for power providers and the monthly cost for transit authorities.
Although multi-rate charging does not significantly reduce the monthly cost, it could be useful in prolonging battery life. The high power rates observed in this work can reduce the lifespan of the battery, whereas lower charge rates can prolong battery life. Therefore, future work incorporating battery health will be explored. We believe that multi-rate charging may offer some flexibility in this scenario. Future work will extend the discrete charge levels in this work to a continuous rate selection.
Because this work presents only a planning framework for a global solution over large stretches of time, it is computationally infeasible to recompute when unplanned events occur. Future work could move this framework toward real-time deployment using a hierarchical approach to control the charging. A precomputed global plan supports the real-time planner by providing top-level guidance. The lower-level real-time planner will adapt to unplanned events by controlling for a return from the current state to the global plan over a finite sliding horizon.
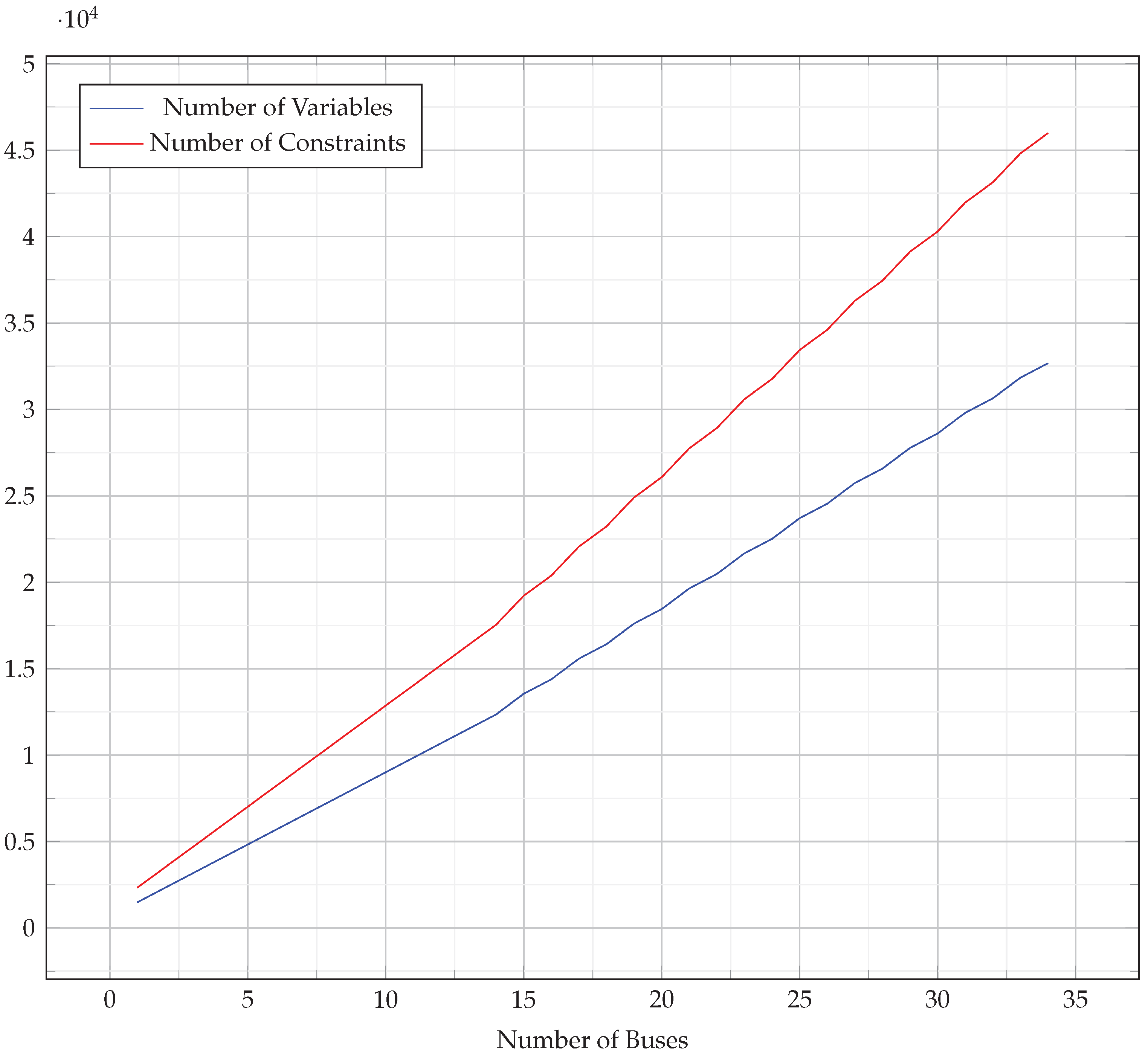
Finally, the computational complexity of our approach decreases as the number of chargers increase but suffers when planning for large bus fleets, as the number of constraints and solution variables scales linearly with the number of buses as shown in
Figure 23. Future improvements might use a solution from a heuristic approach as a “warm start” for the optimizer, which would reduce the computational complexity of finding a globally optimal solution.
In summary, the proposed work could be extended in the following areas: (1) Decrease the compute time by computing a “warm start” for the optimizer using a heuristic approach. (2) Incorporate renewable energy into the optimization scheme in the same way the uncontrolled loads were used. (3) Account for variability in the uncontrolled loads by modifying the inputs to reflect worst-case scenarios. (4) Include the projected costs of battery replacement as a function of high charge rates.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






















