

Utility Factor Curves for Plug-in Hybrid Electric Vehicles: Beyond the Standard Assumptions


Abstract
:1. Introduction
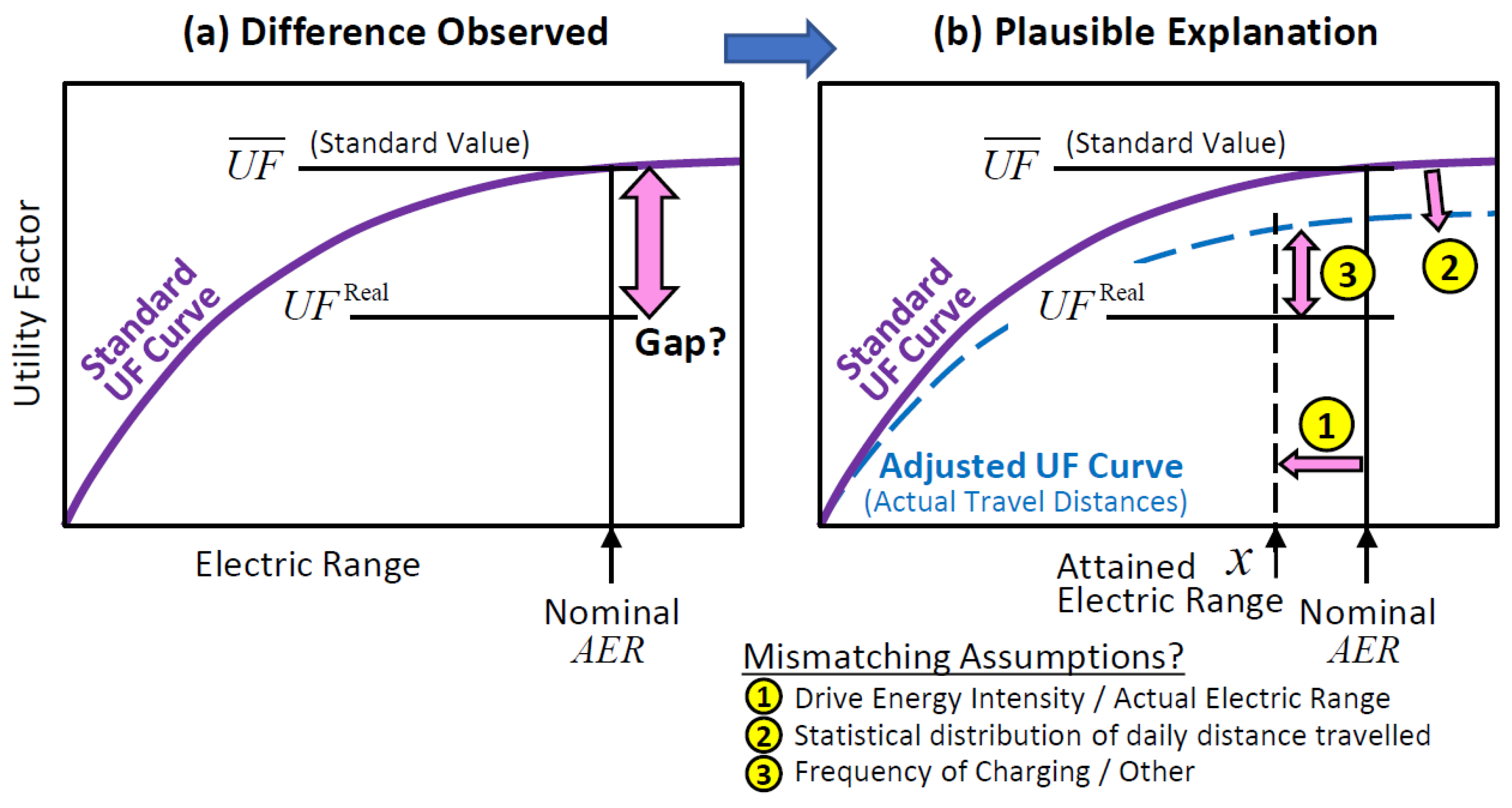
- The gap between standard and real UF values (Figure 1a) as well as the categories of reasons 1–3 (Figure 1b) were drawn in the “negative” direction (i.e., real UF being less than the standard UF). However, this is primarily for illustrative purposes. In reality, it is plausible for any of the three categories of reasons or the overall gap to be in either the positive (i.e., better UF than the standard rating) or negative directions.
- Each of the three main categories of reasons may include several sub-reasons; for example, category #1 (real-world attained AER) could be affected by the acceleration rate and speed driving style of vehicle owners, ambient temperature (which in turn affects both the efficiency of the electric powertrain as well as the heating/cooling power consumption for climate control of the passenger cabin), weight of passengers and cargo, gradient of the terrain (uphill/downhill), or towing load.
- It is also important to note that those three categories of reasons, while understood to be the main contributors to the UF gap, are not the only contributing reasons, nor is it necessarily true that they are linearly independent. For example, some PHEV designs may utilize electric power to warm up the battery during a cold climate, while others might utilize an alternative approach such as briefly turning on the engine, which in turn might affect the observable miles traveled in CD or EV mode.
- The (real-world) attained AER is not necessarily a static number like the nominal AER that is published by regulatory agencies such as the US EPA [14]. In fact, the attained AER can change from day to day depending on the vehicle usage conditions, and such daily variations in the attained AER can have interactions with the other two categories of reasons (charging frequency and distance traveled). Nonetheless, to avoid over-complicating the problem, secondary interactions between the reasons and “all other/unknown” reasons are often lumped with one of the three main categories of reasons.
2. Mathematical Model
2.1. Notations and Assumptions
2.2. Charging Frequency Less Than Once per Drive Day
2.2.1. Overview
2.2.2. Special Case: Binary Charging Behavior
2.2.3. Special Case: All Vehicles with the Same Charging Frequency
2.2.4. Generalized Upper and Lower Bounds
2.3. Charging Frequency: More Than Once per Drive Day
2.4. Summary of Modelled Cases
3. Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- US Department of Energy. How Hybrids Work. Available online: https://www.fueleconomy.gov/feg/hybridtech.shtml (accessed on 16 November 2022).
- US Environmental Protection Agency. Electric & Plug-In Hybrid Electric Vehicles. Available online: https://www.epa.gov/greenvehicles/explaining-electric-plug-hybrid-electric-vehicles (accessed on 16 November 2022).
- Society of Automotive Engineers (SAE). J2841_201009: Utility Factor Definitions for Plug-In Hybrid Electric Vehicles Using Travel Survey Data; SAE International: Warrendale, PA, USA, 2010. [Google Scholar]
- US Department of Energy. Plug-In Hybrids. Available online: https://www.fueleconomy.gov/feg/phevtech.shtml (accessed on 16 November 2022).
- US Environmental Protection Agency. Explaining Electric & Plug-In Hybrid Electric Vehicles. Available online: https://19january2017snapshot.epa.gov/greenvehicles/explaining-electric-plug-hybrid-electric-vehicles_.html (accessed on 1 March 2023).
- United Nations Economic Commission for Europe. United Nations Global Technical Regulation on Worldwide Harmonized Light Vehicles Test Procedures (WLTP). Available online: https://unece.org/fileadmin/DAM/trans/main/wp29/wp29wgs/wp29gen/wp29registry/ECE-TRANS-180a15am4e.pdf (accessed on 17 March 2023).
- Liu, X.; Zhao, F.; Hao, H.; Chen, K.; Liu, Z.; Babiker, H.; Amer, A. From NEDC to WLTP: Effect on the Energy Consumption, NEV Credits, and Subsidies Policies of PHEV in the Chinese Market. Sustainability 2020, 12, 5747. [Google Scholar] [CrossRef]
- Bradley, T.; Quinn, C. Analysis of plug-in hybrid electric vehicle utility factors. J. Power Sources 2010, 195, 5399–5408. [Google Scholar] [CrossRef]
- Wu, X.; Aviquzzaman, M.; Lin, Z. Analysis of plug-in hybrid electric vehicles’ utility factors using GPS-based longitudinal travel data. Transp. Res. Part C 2015, 57, 1–12. [Google Scholar] [CrossRef]
- Paffumi, E.; De Gennaro, M.; Martini, G. Alternative utility factor versus the SAE J2841 standard method for PHEV and BEV applications. Transp. Policy 2018, 68, 80–97. [Google Scholar] [CrossRef]
- Smart, J.; Bradley, T.; Salisbury, S. Actual Versus Estimated Utility Factor of a Large Set of Privately Owned Chevrolet Volts. Int. J. Altern. Powertrains 2014, 3, 30–35. [Google Scholar] [CrossRef]
- Raghavan, S.; Tal, G. Plug-in hybrid electric vehicle observed utility factor: Why the observed electrification performance differ from expectations. Int. J. Sustain. Transp. 2020, 16, 105–136. [Google Scholar] [CrossRef]
- Hamza, K.; Laberteaux, K.; Chu, K.-C. On inferred real-world fuel consumption of past decade plug-in hybrid electric vehicles in the US. Environ. Res. Lett. 2022, 17, 104053. [Google Scholar] [CrossRef]
- US Environmental Protection Agency. Fuel Economy Guide. Available online: https://www.fueleconomy.gov/feg/printGuides.shtml (accessed on 18 March 2023).
- US Department of Transportation. National Household Travel Survey. Available online: https://nhts.ornl.gov/download.shtm (accessed on 18 March 2023).
- National Renewable Energy Laboratory. 2010–2012 California Household Travel Survey. Available online: https://www.nrel.gov/transportation/secure-transportation-data/tsdc-california-travel-survey.html (accessed on 18 March 2023).
- Utility Factors Extended (Data Available on Google Drive Cloud Storage). Available online: https://drive.google.com/drive/folders/1UL3FTffKbgbgi_EMVu0bWt_CQTkS2_hr?usp=sharing (accessed on 18 March 2023).
- NuStats LLC. 2010–2012 California Household Travel Survey Final Report. Available online: https://www.nrel.gov/transportation/secure-transportation-data/assets/pdfs/calif_household_travel_survey.pdf (accessed on 19 March 2023).
- Hu, T.; Kahng, A. Linear and Integer Programming Made Easy; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Collani, E.; Draeger, K. Binomial Distribution Handbook for Scientists and Engineers; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Bazaraa, M.; Sherali, H.; Shetty, C. Nonlinear Programming: Theory and Algorithms; Wiley: New York, NY, USA, 2006. [Google Scholar]
- Plötz, P.; Moll, C.; Bieker, G.; Mock, P. From lab-to-road: Real-world fuel consumption and CO2 emissions of plug-in hybrid electric vehicles. Environ. Res. Lett. 2021, 16, 054078. [Google Scholar] [CrossRef]
- US Environmental Protection Agency. Multi-Pollutant Emissions Standards for Model Years 2027 and Later Light-Duty and Medium-Duty Vehicles. 2023. Available online: https://www.regulations.gov/search?documentTypes=Proposed%20Rule&filter=EPA-HQ-OAR-2022-0829 (accessed on 23 October 2023).
- Argonne National Laboratory. GREET Model. Available online: https://greet.es.anl.gov/ (accessed on 20 March 2023).
- US Energy Information Administration. Available online: https://www.eia.gov/electricity/annual/ (accessed on 3 October 2023).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Discussed | Description |
|---|---|---|
| λi ∈ {0, 1}, μ = 0 | Section 2.2.2 | No daytime charging. Overnight charging behavior is binary; some vehicles always charge, others never charge. |
| All λi = λ, 0 ≤ λ ≤ 1, μ = 0 | Section 2.2.3 | No daytime charging. The overnight charging frequency is the same for all vehicles. |
| 0 ≤ λi ≤ 1, μ = 0 | Section 2.2.4 | No daytime charging. Generalized case for overnight charging, where some vehicles always charge, some never charge, others somewhere in-between. |
| All λi = 1, 0 ≤ μi ≤ 1 | Section 2.3 | Vehicles always charge overnight. Some vehicles also gain one additional charging event during the day. |
| 0 ≤ λi ≤ 1, 0 ≤ μi | Section 3, future work | Fully generalized case where overnight charging frequency for each individual vehicle can be anywhere between always and never, while at the same time, each individual vehicle may have additional one or more charging events during the day |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hamza, K.; Laberteaux, K.P. Utility Factor Curves for Plug-in Hybrid Electric Vehicles: Beyond the Standard Assumptions. World Electr. Veh. J. 2023, 14, 301. https://doi.org/10.3390/wevj14110301
Hamza K, Laberteaux KP. Utility Factor Curves for Plug-in Hybrid Electric Vehicles: Beyond the Standard Assumptions. World Electric Vehicle Journal. 2023; 14(11):301. https://doi.org/10.3390/wevj14110301
Chicago/Turabian StyleHamza, Karim, and Kenneth P. Laberteaux. 2023. "Utility Factor Curves for Plug-in Hybrid Electric Vehicles: Beyond the Standard Assumptions" World Electric Vehicle Journal 14, no. 11: 301. https://doi.org/10.3390/wevj14110301