
Assessment of an Electric Vehicle Drive Cycle in Relation to Minimised Energy Consumption with Driving Behaviour: The Case of Addis Ababa, Ethiopia, and Its Suburbs


Abstract
:1. Introduction
2. Materials and Methods
2.1. Route Selection
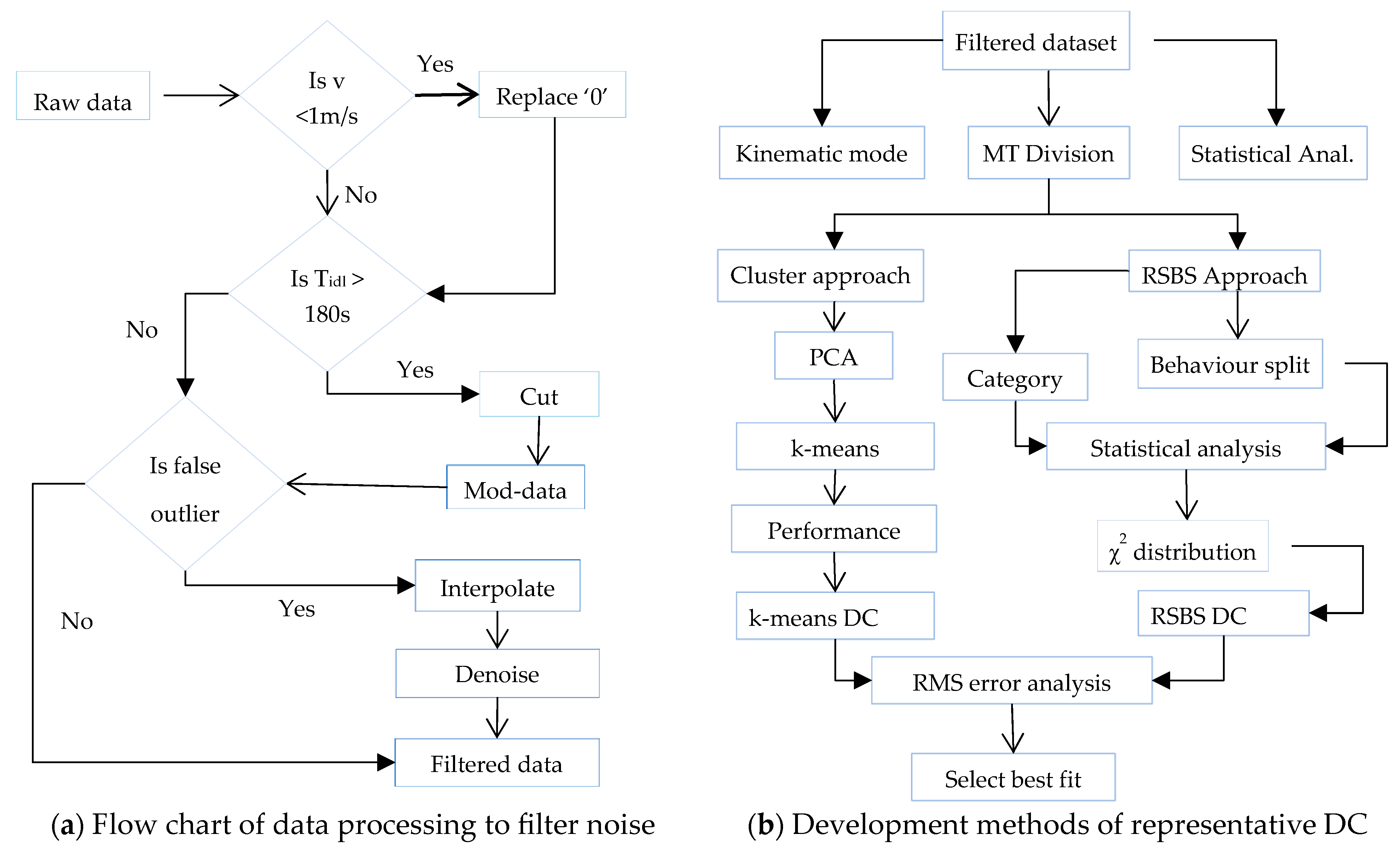
2.2. Data Collection and Processing
2.3. Driving Feature Definition and Pattern Characterisation
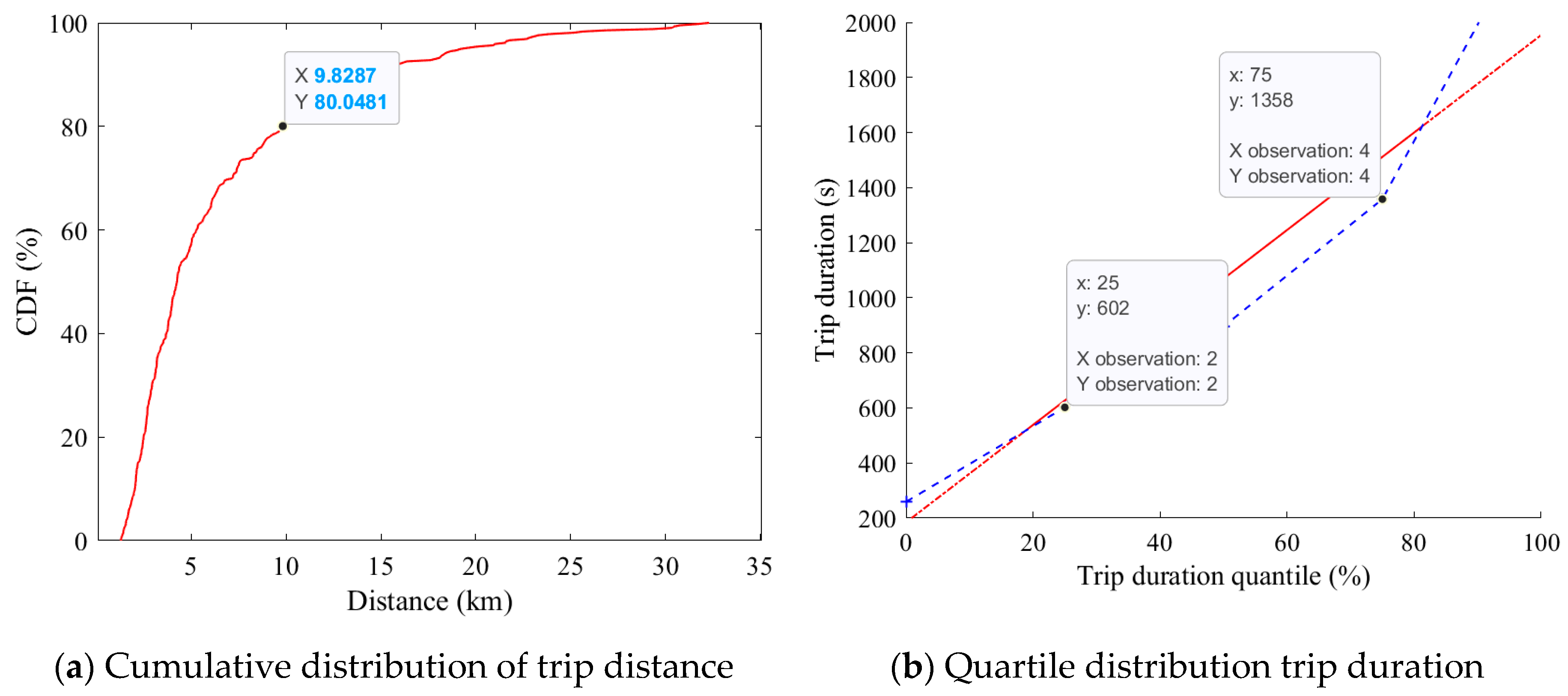
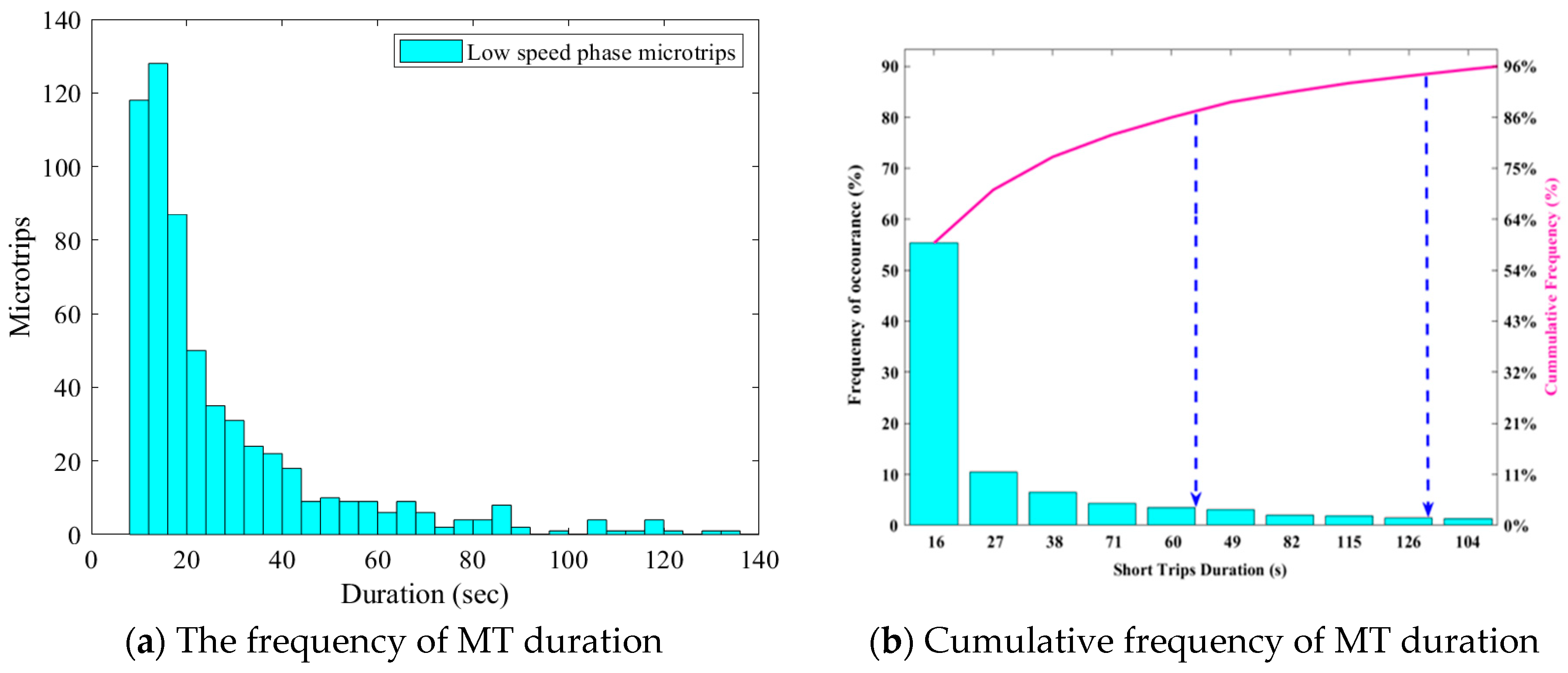
2.4. Trip and Micro Trip Division
2.5. Development Methods of Driving Cycle
2.5.1. Random Selection-to-Rebuild with Behaviour Split (RSBS)
2.5.2. K-Means Clustering Method
3. Results and Discussion
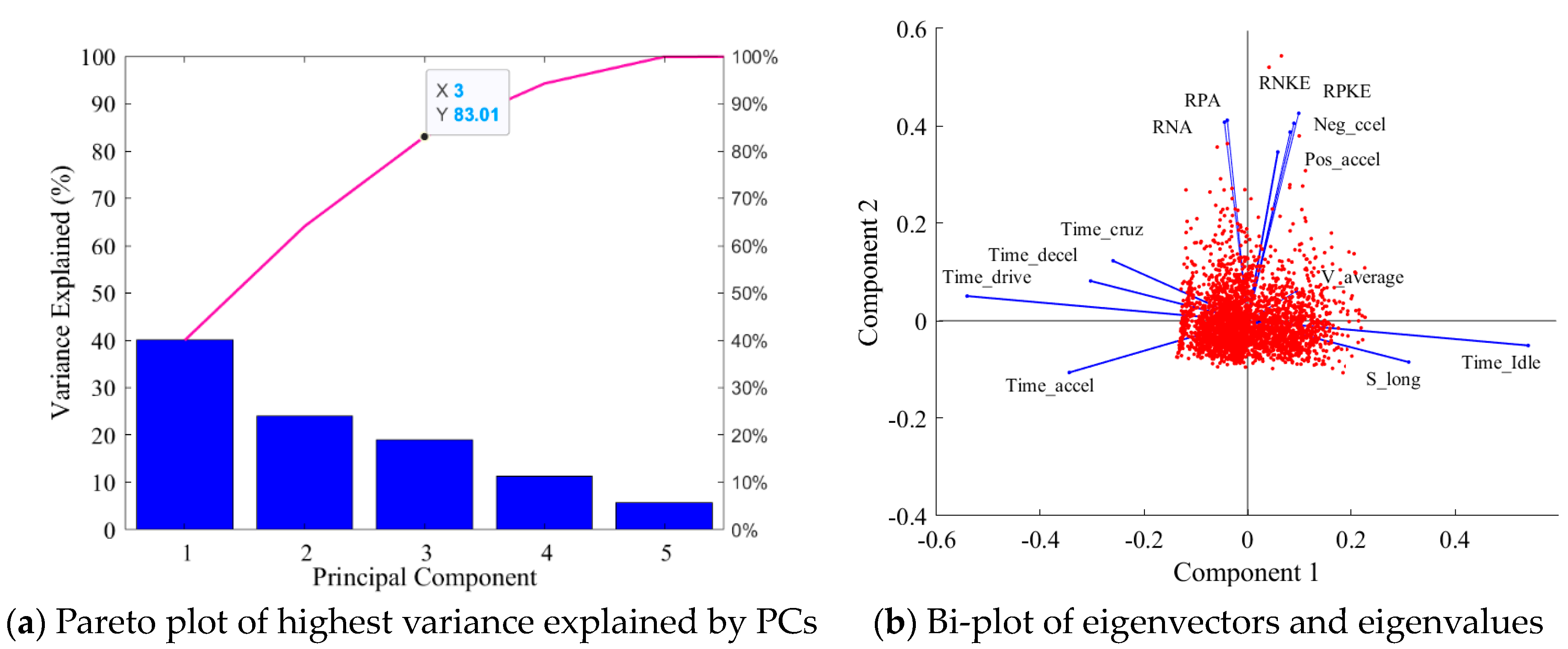
3.1. Results of Statistical Analysis
3.1.1. Real-Data Trip Features
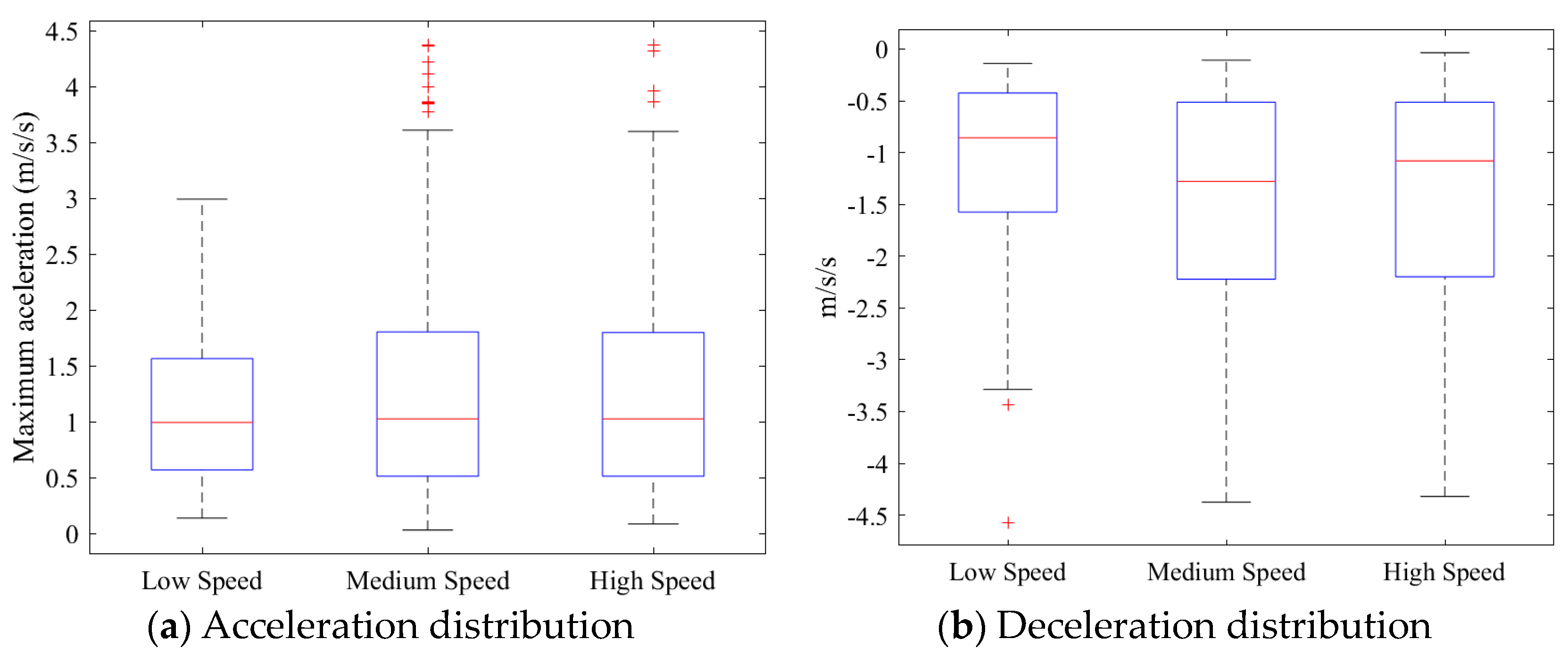
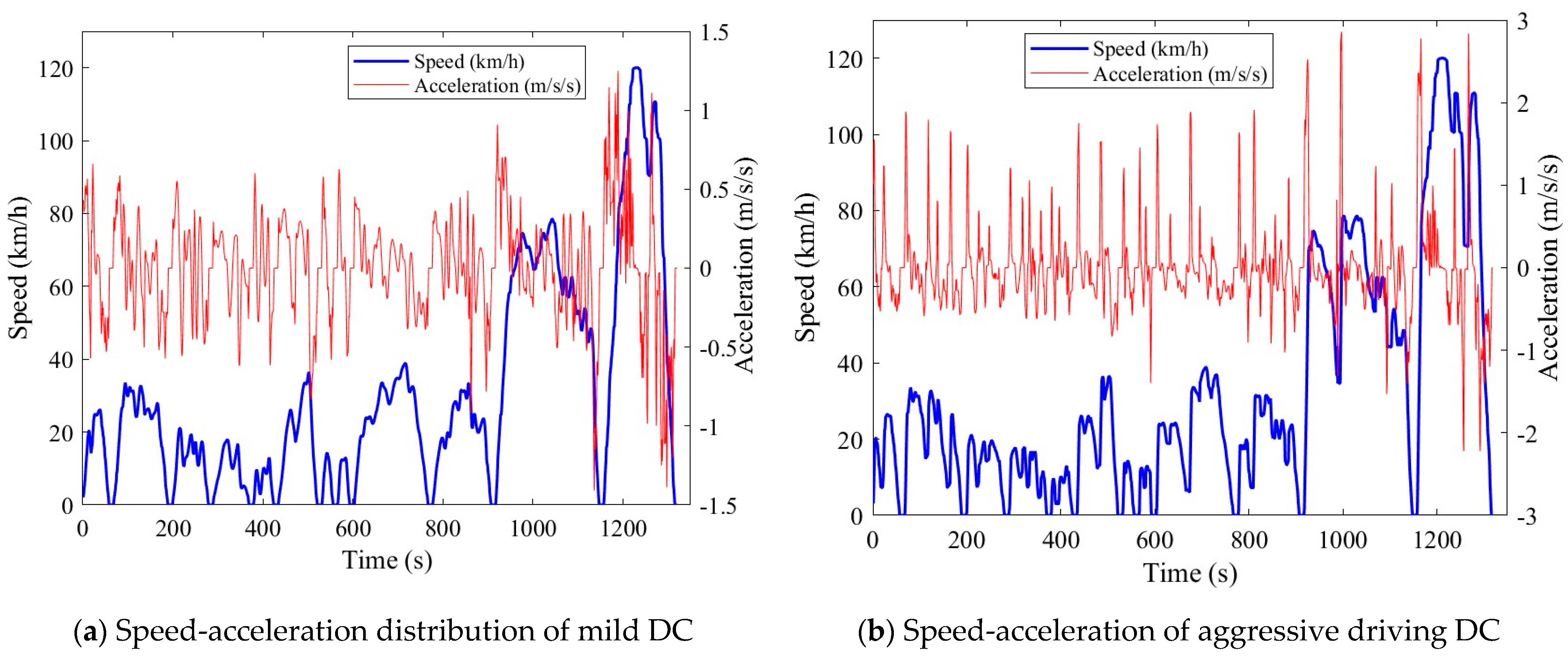
3.1.2. Driving Behaviour Split
3.2. Drive Cycle Synthesised by the RSBS Method
3.3. Drive Cycle Synthesised by the k-Means Method
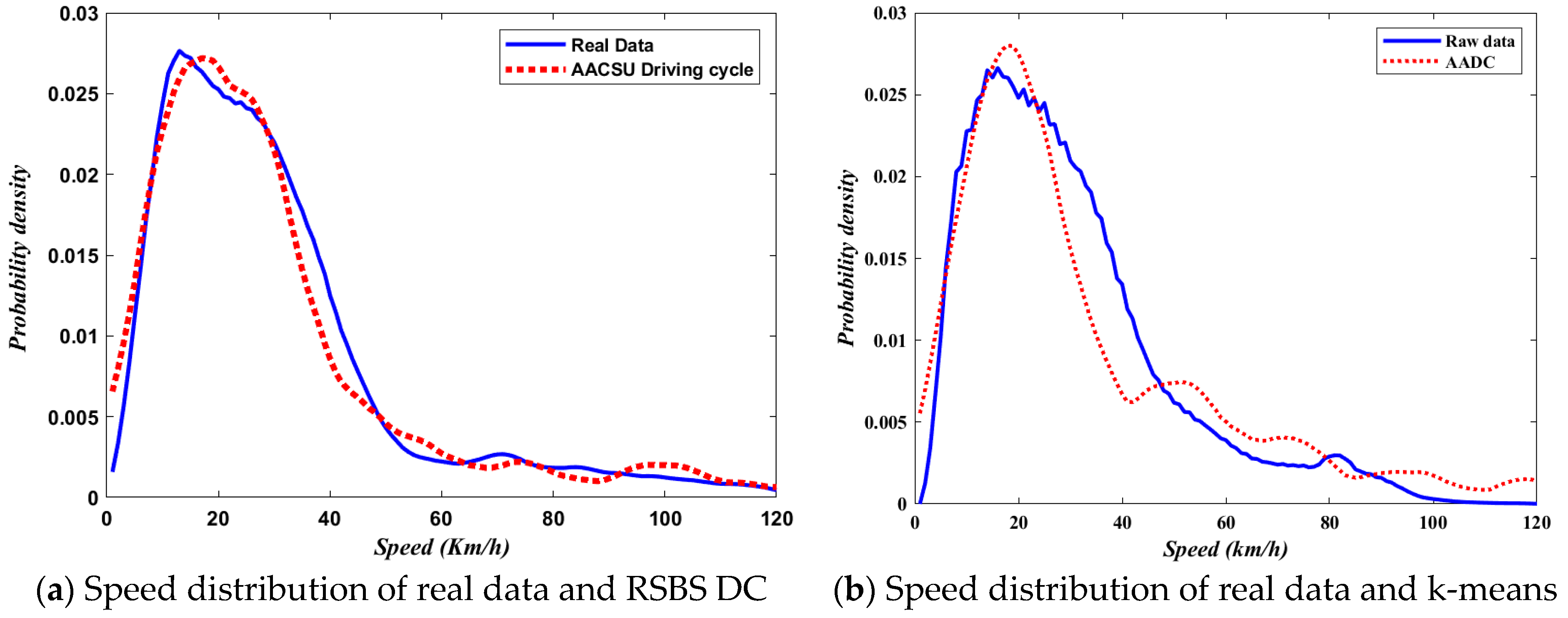
3.4. Characteristic Distribution of Synthesised Drive Cycles and Real Dataset
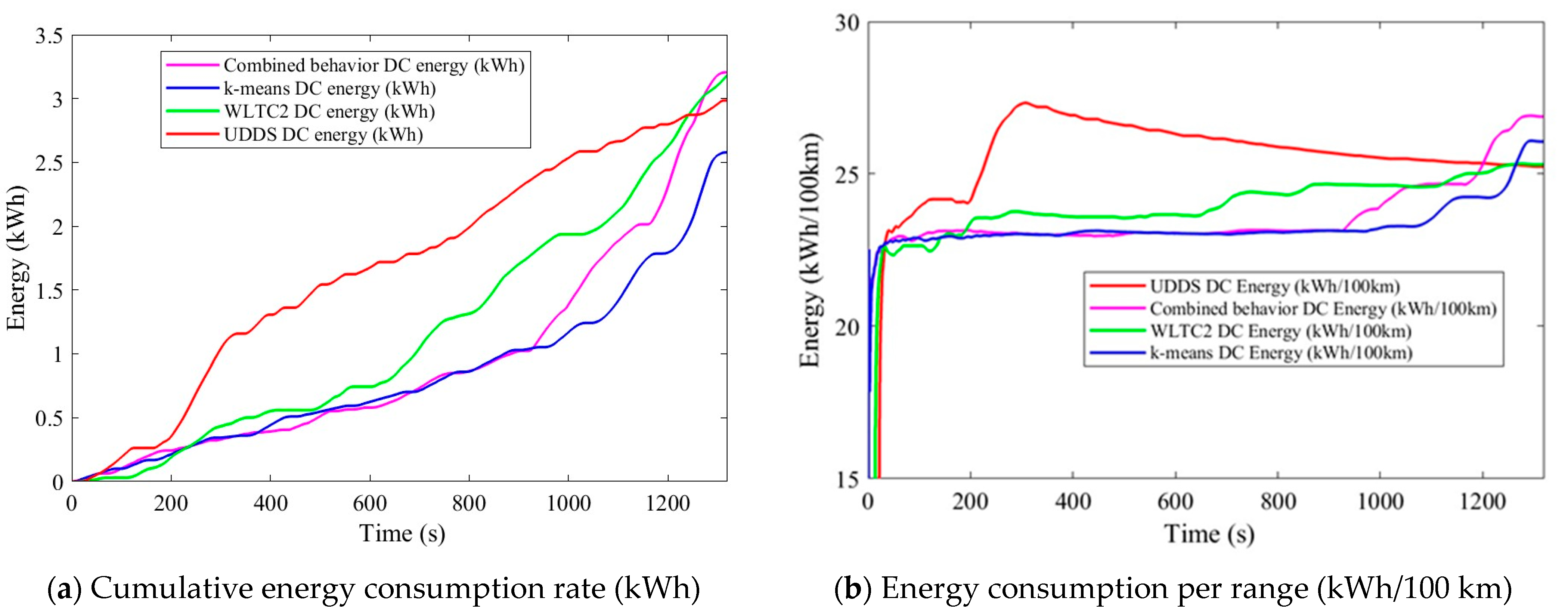
3.5. Comparison of Energy Consumption between Standard and AASU Candidate DCs
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pathak, A.; Sethuraman, G.; Krapf, S.; Ongel, A.; Lienkamp, M. Exploration of Optimal Powertrain Design Using Realistic Load Profiles. World Electr. Veh. J. 2019, 10, 56. [Google Scholar] [CrossRef]
- Lasocki, J. The WLTC vs NEDC: A Case Study on the Impacts of Driving Cycle on Engine Performance and Fuel Consumption. Int. J. Automot. Mech. Eng. 2021, 18, 9071–9081. [Google Scholar] [CrossRef]
- Khemri, N.; Supina, J.; Syed, F.; Ying, H. Developing a Real-World, Second-by-Second Driving Cycle Database through Public Vehicle Trip Surveys. In SAE Technical Paper Series; SAE International: Warrendale, PA, USA, 2019. [Google Scholar] [CrossRef]
- Global EV Outlook 2022: Securing Supplies for an Electric Future; International Energy Agency: Paris, France, 2022. [CrossRef]
- Global EV Outlook 2020: Entering the Decade of Electric Drive; International Energy Agency: Paris, France, 2020.
- Pakdel Bonab, S.; Kazerooni, A.; Payganeh, G.; Esfahanian, M. Extracting Tehran refuse collection truck driving cycle and estimating the braking energy. Int. J. Automot. Eng. 2020, 10, 3149–3157. [Google Scholar]
- Lyu, N.; Wang, Y.; Wu, C.; Peng, L.; Thomas, A.F. Using naturalistic driving data to identify driving style based on longitudinal driving operation conditions. J. Intell. Connect. Veh. 2022, 5, 17–35. [Google Scholar] [CrossRef]
- Bouhsissin, S.; Sael, N.; Benabbou, F. Driver Behavior Classification: A Systematic Literature Review. IEEE Access 2023, 11, 14128–14153. [Google Scholar] [CrossRef]
- Ghandour, R.; Potams, A.J.; Boulkaibet, I.; Neji, B.; Al Barakeh, Z. Driver behavior classification system analysis using machine learning methods. Appl. Sci. 2021, 11, 10562. [Google Scholar] [CrossRef]
- Busho, S.W.; Alemayehu, D. Applying 3D-eco routing model to reduce environmental footprint of road transports in Addis Ababa City. Environ. Syst. Res. 2020, 9, 17. [Google Scholar] [CrossRef]
- Zhao, M.; Gao, H.; Han, Q.; Ge, J.; Wang, W.; Qu, J.; Vanajakshi, L. Development of a Driving Cycle for Fuzhou Using K-Means and AMPSO. J. Adv. Transp. 2021, 2021, 5430137. [Google Scholar] [CrossRef]
- Thomas, D.B. Real World Driving Emissions from Hybrid Electric Vehicles and the Impact of Biofuels. Ph.D. Thesis, University of Leeds, Leeds, UK, 2020. [Google Scholar]
- Huzayyin, O.A.; Salem, H.; Hassan, M.A. A representative urban driving cycle for passenger vehicles to estimate fuel consumption and emission rates under real-world driving conditions. Urban Clim. 2021, 36, 100810. [Google Scholar] [CrossRef]
- Hayes, J.G.; Goodarzi, G.A.J.I.A.; Magazine, E.S. Book review: Electric powertrain: Energy systems, power electronics and drives for hybrid, electric and fuel cell vehicles. IEEE Aerosp. Electron. Syst. Mag. 2019, 34, 46–47. [Google Scholar] [CrossRef]
- Rodrigues, C.D.P. Design of a High-Speed Transmission for an Electric Vehicle. Master’s Thesis, University of Porto, Porto, Portugal, 2018. [Google Scholar]
- Jacobson, B. Vehicle Dynamics Compendium for Course MMF062, 2016th ed.; Chalmers University of Technology: Gothenburg, Sweden, 2016. [Google Scholar]
- Yu, Y.; Jiang, J.; Wang, P.; Li, J. A-EMCS for PHEV based on real-time driving cycle prediction and personalized travel characteristics. Math. Biosci. Eng. MBE 2020, 17, 6310–6341. [Google Scholar] [CrossRef] [PubMed]
- Sayed, K.; Kassem, A.; Saleeb, H.; Alghamdi, A.S.; Abo-Khalil, A.G. Energy-Saving of Battery Electric Vehicle Powertrain and Efficiency Improvement during Different Standard Driving Cycles. Sustainability 2020, 12, 10466. [Google Scholar] [CrossRef]
- Wang, S.; Wang, J.; Song, L.; Niu, Z.; Hu, X. Design of two-regional flexible-route bus systems considering interregional demands. J. Adv. Transp. 2022, 2022, 9372011. [Google Scholar] [CrossRef]
- Peng, J.; Jiang, J.; Ding, F.; Tan, H. Development of Driving Cycle Construction for Hybrid Electric Bus: A Case Study in Zhengzhou, China. Sustainability 2020, 12, 7188. [Google Scholar] [CrossRef]
- Zhao, D.; Zhong, Y.; Fu, Z.; Hou, J.; Zhao, M.; Galante, F. A Review for the Driving Behavior Recognition Methods Based on Vehicle Multisensor Information. J. Adv. Transp. 2022, 2022, 7287511. [Google Scholar] [CrossRef]
- Chandrashekar, C.; Agrawal, P.; Chatterjee, P.; Pawar, D.S. Development of E-rickshaw driving cycle (ERDC) based on micro-trip segments using random selection and K-means clustering techniques. IATSS Res. 2021, 45, 551–560. [Google Scholar] [CrossRef]
- Han, B.; Wu, Z.; Gu, C.; Ji, K.; Xu, J. Developing a Regional Drive Cycle Using GPS-Based Trajectory Data from Rideshare Passenger Cars: A Case of Chengdu, China. Sustainability 2021, 13, 2114. [Google Scholar] [CrossRef]
- Khadhir, A.; Bhaskar, A.; Vanajakshi, L.; Haque, M.M. Development of a theoretical delay model for heterogeneous and less lane-disciplined traffic conditions. J. Adv. Transp. 2022, 2022, 3260945. [Google Scholar] [CrossRef]
- Chen, A.H.; Liang, Y.-C.; Chang, W.-J.; Siauw, H.-Y.; Minanda, V. RFM model and K-means clustering analysis of transit traveller profiles: A case study. J. Adv. Transp. 2022, 2022, 1108105. [Google Scholar] [CrossRef]
- Gebisa, A.; Gebresenbet, G.; Gopal, R.; Nallamothu, R.B. A Neural Network and Principal Component Analysis Approach to Develop a Real-Time Driving Cycle in an Urban Environment: The Case of Addis Ababa, Ethiopia. Sustainability 2022, 14, 13772. [Google Scholar] [CrossRef]
- Liu, T.; Tan, W.; Tang, X.; Zhang, J.; Xing, Y.; Cao, D. Driving conditions-driven energy management strategies for hybrid electric vehicles: A review. Renew. Sustain. Energy Rev. 2021, 151, 111521. [Google Scholar] [CrossRef]
- Singh, M.K.; Pathivada, B.K.; Rao, K.R.; Perumal, V. Driver behaviour modelling of vehicles at signalized intersection with heterogeneous traffic. IATSS Res. 2022, 46, 236–246. [Google Scholar] [CrossRef]
- Kabalan, B. Systematic Methodology for Generation and Design of Hybrid Vehicle Powertrains. Ph.D. Thesis, Université de Lyon, Lyon, France, 2020. [Google Scholar]
- Zhou, Y.; Ravey, A.; Péra, M.-C. A survey on driving prediction techniques for predictive energy management of plug-in hybrid electric vehicles. J. Power Sources 2019, 412, 480–495. [Google Scholar] [CrossRef]
- Rashed, G.I.; Li, X.; Pang, Z.; Zhao, H.; Kheshti, M. Research on Construction Method of Urban Driving Cycle of Pure Electric Vehicle. E3S Web Conf. 2021, 252, 02064. [Google Scholar] [CrossRef]
- Nagaraj, S. Algorithm to Generate Synthetic Driving Cycle Using Real Driving Data. Master’s Thesis, Chalmers University of Technology, Göteborg, Sweden, 2021. [Google Scholar]
- Yuan, T.; Liu, R.; Zhao, X.; Yu, Q.; Zhu, X.; Wang, S. Analysis of normal stopping behavior of drivers at urban intersections in China. J. Adv. Transp. 2022, 2022, 7588589. [Google Scholar] [CrossRef]
- Gao, Z.; LaClair, T.; Ou, S.; Huff, S.; Wu, G.; Hao, P.; Boriboonsomsin, K.; Barth, M. Evaluation of electric vehicle component performance over eco-driving cycles. Energy 2019, 172, 823–839. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Type | Total Number of Data | Percentage of Data (%) |
|---|---|---|
| Raw data | 179,894 | 100.00 |
| Long dwell | 14,724 | 8.18 |
| Zero drift | 900 | 0.50 |
| False zero | 200 | 0.11 |
| Removed | 15,824 | 8.80 |
| Filtered | 164,070 | 91.20 |
| No. | Feature Category | Driving Features | Symbol |
|---|---|---|---|
| 1 | Level measures | Average speed (km/h) | Vave |
| 2 | Maximum speed (km/h) | Vmax | |
| 3 | Average running speed (km/h) | Vrave | |
| 4 | Average acceleration (m/s2) | aave | |
| 5 | Maximum acceleration (m/s2) | amax | |
| 6 | Average deceleration (m/s2) | dave | |
| 7 | Maximum deceleration (m/s2) | dmax | |
| 8 | Total duration (s) | Ttot | |
| 9 | Approximated distance (km) | Dlng | |
| 10 | Oscillatory measures | Relative positive acceleration (m/s2) | RPA |
| 11 | Positive aggressiveness index (m2/s3) | PAI | |
| 12 | Relative negative acceleration (m/s2) | RNA | |
| 13 | Negative aggressiveness index (m2/s3) | NAI | |
| 14 | Distribution measures | Time percentage of idling (%) | Tidle |
| 15 | Time percentage of cruising (%) | Tcruz | |
| 16 | Time percentage of acceleration (%) | Taccel | |
| 17 | Time percentage of deceleration (%) | Tdecel |
| Kinematic Mode | Speed (V) | Acceleration (a) | Duration (T) | Distance (D) |
|---|---|---|---|---|
| Stop mode | V < 1 m/s | >−0.15 m/s2 and <0.15 m/s2 | Tidle | 0 |
| Acceleration | V > 1 m/s | >0.15 m/s2 and <4.5 m/s2 | Tcruz | Dcruz |
| Cruising | V > 1 m/s | >−0.15 m/s2 and <0.15 m/s2 | Taccel | Daccel |
| Deceleration | V > 1 m/s | <−0.15 m/s2 and >−4.5 m/s2 | Tdecel | Ddecel |
| Profile Characteristics | Low | Medium | High |
|---|---|---|---|
| Traffic speed limit (km/h) | 30–40 | 60–80 | 100–120 |
| Real data proportion (%) | 70 | 18 | 12 |
| Phase duration (s) | 924 | 238 | 159 |
| Average short trip duration (s) | 64 | 251 | 131 |
| Average stop duration (s) | 11 | 5 | 5 |
| Short trips | 10 | 1 | 1 |
| Stops | 11 | 2 | 2 |
| Drive Cycles | Cycle Phase | Duration (s) | V w/o Stops (km/h) | V w/Stops (km/h) | aave (m/s2) | dave (m/s2) | D (km) | RPA (m/s2) | RNA (m/s2) |
|---|---|---|---|---|---|---|---|---|---|
| RSBS | Low | 882 | 19.8 | 17.6 | 0.43 | −0.46 | 4.196 | 0.185 | −0.22 |
| Medium | 255 | 56.1 | 53.7 | 0.625 | −0.705 | 2.942 | 0.5 | −0.66 | |
| High | 183 | 81.4 | 73.9 | 0.45 | −0.61 | 2.835 | 0.29 | −0.32 | |
| k-means | Low | 950 | 18.9 | 16.7 | 0.645 | −0.645 | 4.42 | 0.43 | 0.40 |
| Medium | 240 | 40.4 | 36.4 | 0.54 | −0.705 | 2.43 | 0.56 | 0.65 | |
| High | 132 | 85.4 | 82.1 | 0.625 | −0.621 | 3.01 | 0.72 | 0.91 | |
| Real data | Low | 101,994 | 21.30 | 14.7 | 0.44 | −0.36 | 400. | 0.34 | −0.29 |
| Medium | 26,227 | 59.75 | 33.4 | 0.54 | −0.74 | 249.9 | 0.63 | −0.62 | |
| High | 17,485 | 94.9 | 78.1 | 0.39 | −0.42 | 740.7 | 0.45 | −0.36 | |
| WLTC−2 | Low | 589 | 26.0 | 51.4 | 0.92 | −1.07 | 3.132 | 0.244 | 0.2112 |
| Medium | 433 | 44.1 | 74.7 | 0.96 | −0.99 | 4.712 | 0.629 | 0.2489 | |
| High | 455 | 57.8 | 85.2 | 0.85 | −1.11 | 6.820 | 0.962 | 0.1994 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mamo, T.; Gebresenbet, G.; Gopal, R.; Yoseph, B. Assessment of an Electric Vehicle Drive Cycle in Relation to Minimised Energy Consumption with Driving Behaviour: The Case of Addis Ababa, Ethiopia, and Its Suburbs. World Electr. Veh. J. 2023, 14, 302. https://doi.org/10.3390/wevj14110302
Mamo T, Gebresenbet G, Gopal R, Yoseph B. Assessment of an Electric Vehicle Drive Cycle in Relation to Minimised Energy Consumption with Driving Behaviour: The Case of Addis Ababa, Ethiopia, and Its Suburbs. World Electric Vehicle Journal. 2023; 14(11):302. https://doi.org/10.3390/wevj14110302
Chicago/Turabian StyleMamo, Tatek, Girma Gebresenbet, Rajendiran Gopal, and Bisrat Yoseph. 2023. "Assessment of an Electric Vehicle Drive Cycle in Relation to Minimised Energy Consumption with Driving Behaviour: The Case of Addis Ababa, Ethiopia, and Its Suburbs" World Electric Vehicle Journal 14, no. 11: 302. https://doi.org/10.3390/wevj14110302