
Modeling of the Achilles Subtendons and Their Interactions in a Framework of the Absolute Nodal Coordinate Formulation

Abstract
:1. Introduction
2. ANCF Beam Element
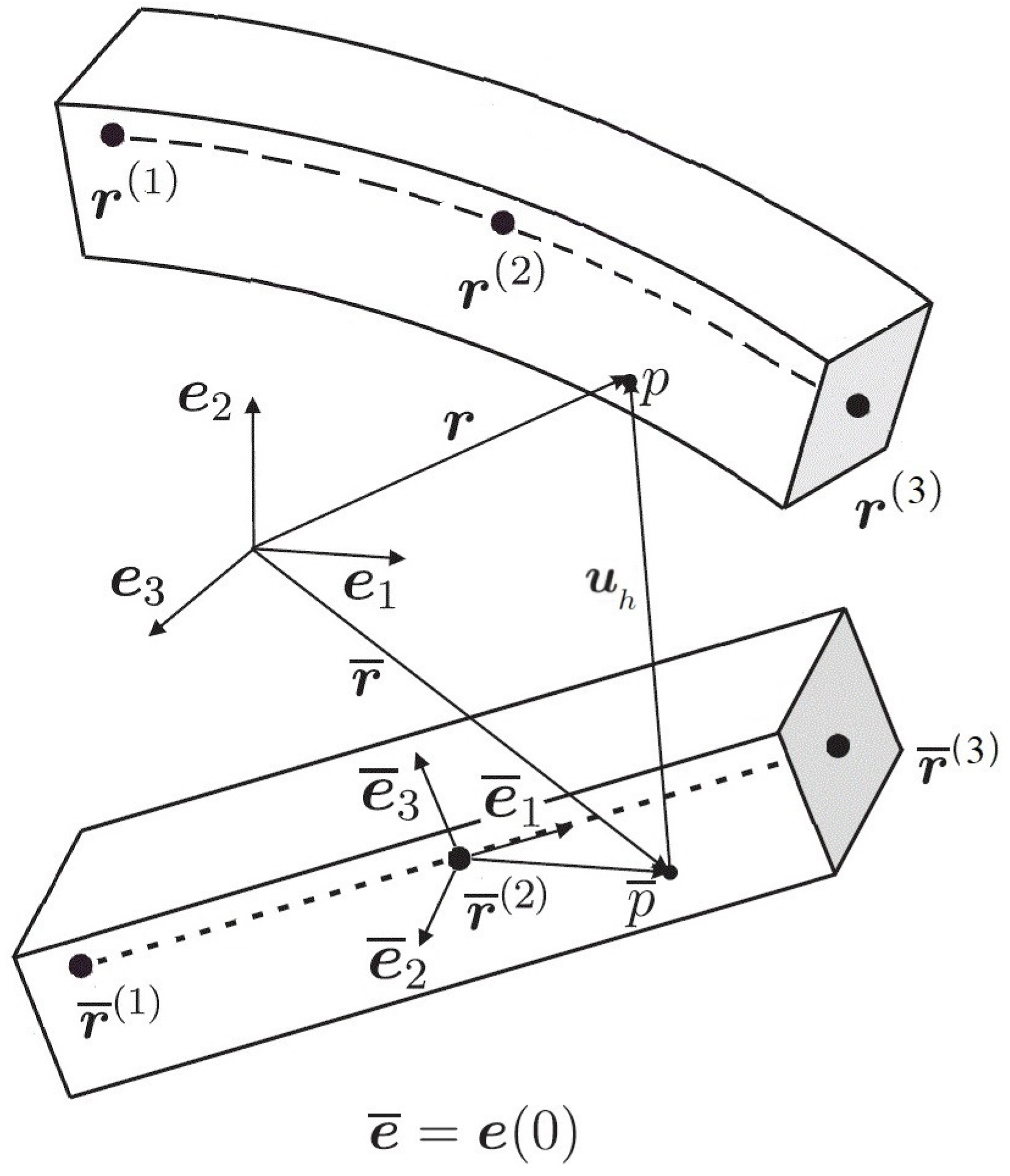
2.1. Kinematics of the ANCF Continuum Beam Elements
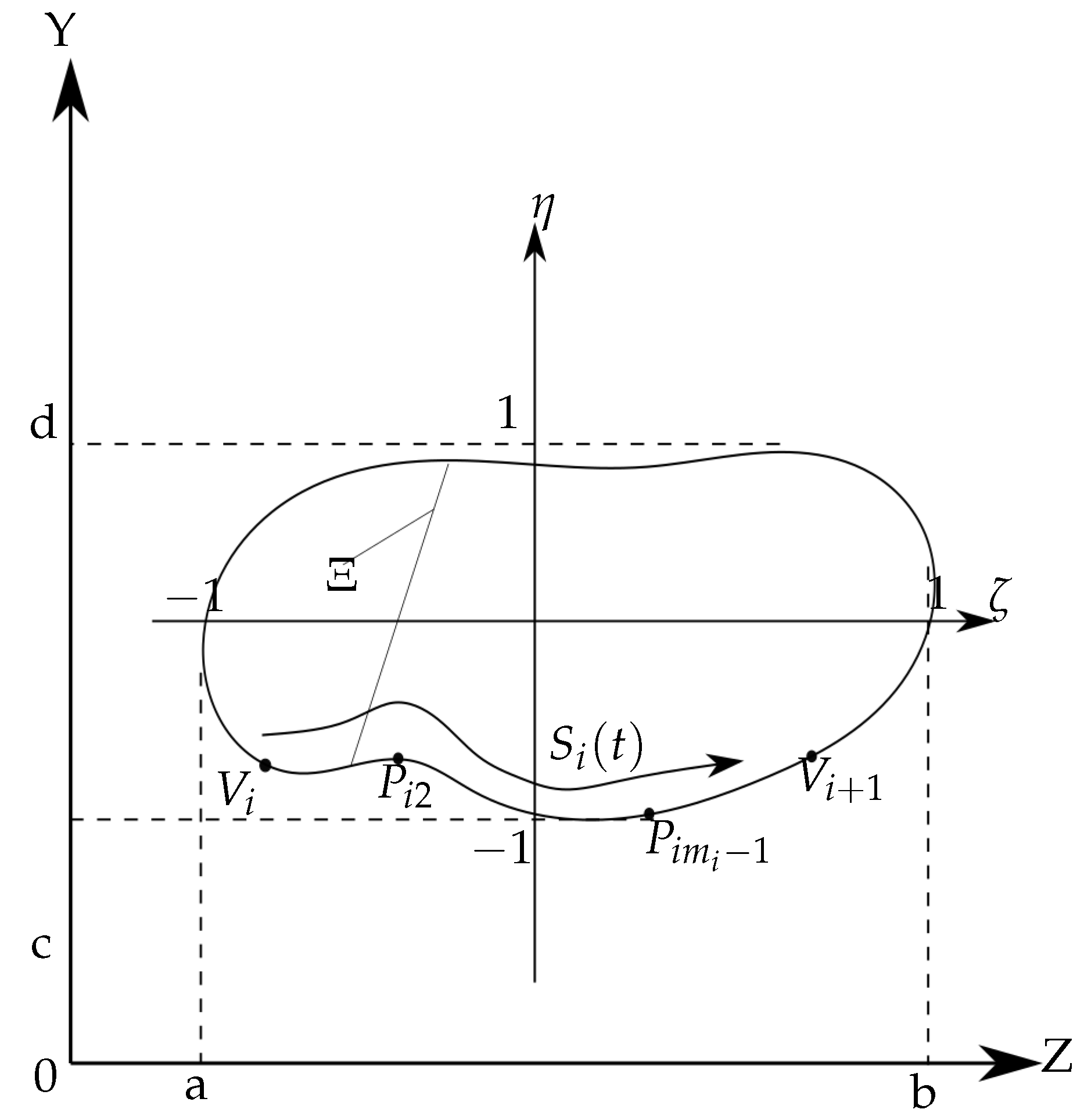
2.2. Cross-Section Geometry Description
3. Equilibrium Equation
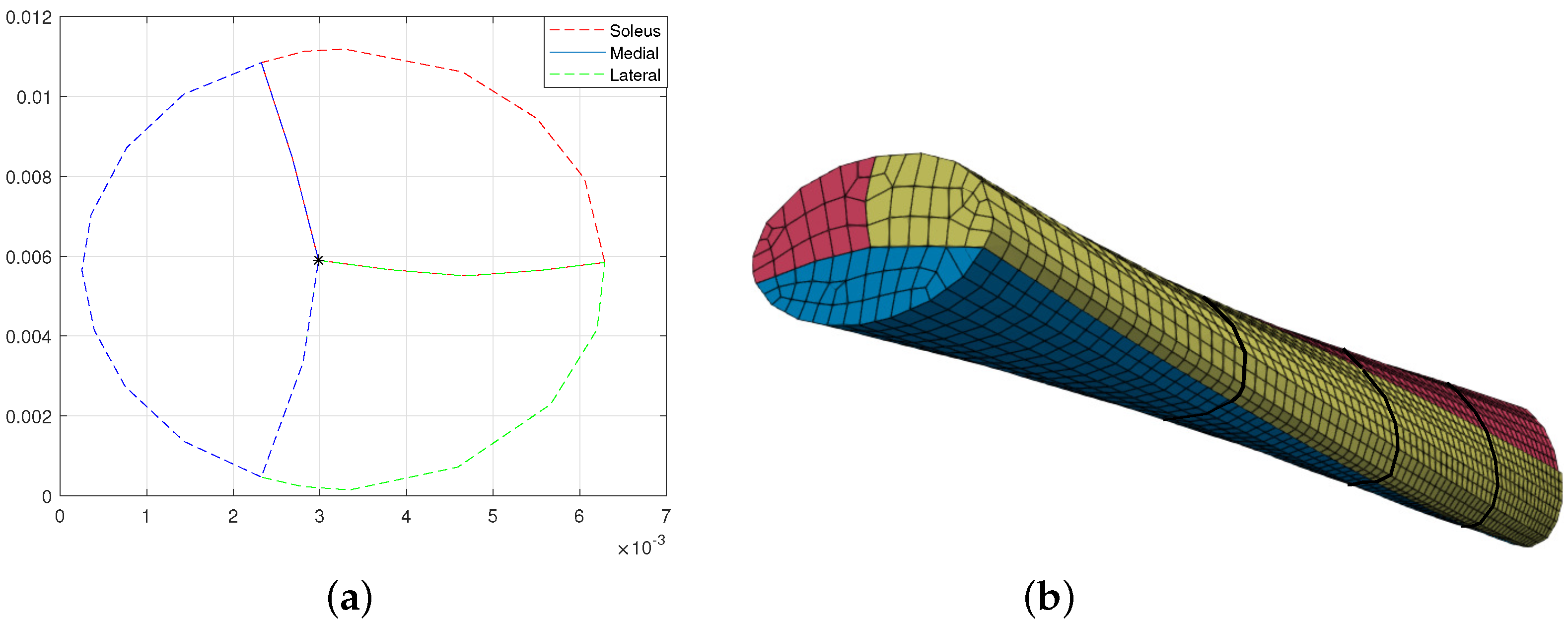
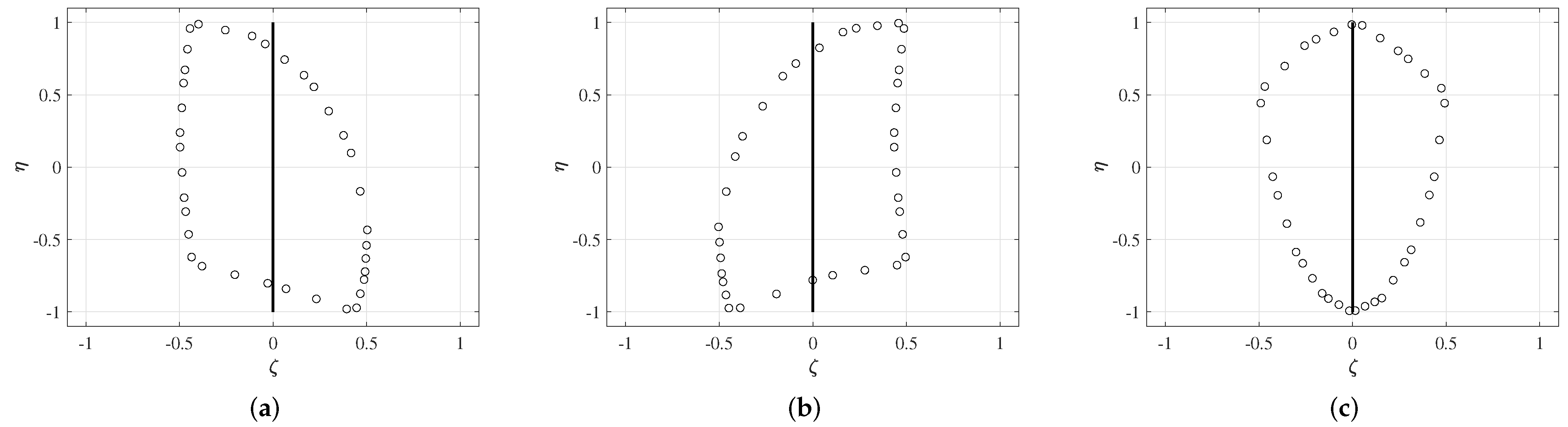
4. Approximation of the Tendon Tissue
5. Contact Formulation
6. Numerical Examples
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AT | Achilles tendon |
| FEM | Finite Element Model |
| ANCF | Absolute Nodal Coordinate Formulation |
| DOF | Degrees of Freedom |
References
- Komi, P.V.; Fukashiro, S.; Järvinen, M. Biomechanical loading of Achilles tendon during normal locomotion. Clin. J. Sport Med. 1992, 11, 521–531. [Google Scholar] [CrossRef]
- Järvinen, T.A.; Kannus, P.; Maffulli, N.; Khan, K.M. Achilles Tendon Disorders: Etiology and Epidemiology. Foot Ankle Clin. 2005, 10, 255–266. [Google Scholar] [CrossRef] [PubMed]
- Slane, L.C.; Thelen, D.G. Non-uniform displacements within the Achilles tendon observed during passive and eccentric loading. J. Biomech. 2014, 47, 2831–2835. [Google Scholar] [CrossRef] [Green Version]
- Khair, R.M.; Stenroth, L.; Péter, A.; Cronin, N.J.; Reito, A.; Paloneva, J.; Finni, T. Non-uniform displacement within ruptured Achilles tendon during isometric contraction. Scand. J. Med. Sci. Sport. 2021, 31, 1069–1077. [Google Scholar] [CrossRef] [PubMed]
- Obuchowicz, R.; Ekiert, M.; Kohut, P.; Holak, K.; Ambrozinski, L.; Tomaszewski, K.; Uhl, T.; Mlyniec, A. Interfascicular matrix-mediated transverse deformation and sliding of discontinuous tendon subcomponents control the viscoelasticity and failure of tendons. J. Mech. Behav. Biomed. Mater. 2019, 97, 238–246. [Google Scholar] [CrossRef] [PubMed]
- Farris, D.J.; Trewartha, G.; McGuigan, M.P.; Lichtwark, G.A. Differential strain patterns of the human Achilles tendon determined in vivo with freehand three-dimensional ultrasound imaging. J. Exp. Biol. 2013, 216, 594–600. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Obst, S.J.; Renault, J.B.; Newsham-West, R.; Barrett, R.S. Three-dimensional deformation and transverse rotation of the human free Achilles tendon in vivo during isometric plantarflexion contraction. J. Appl. Physiol. 2014, 116, 376–384. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bojsen-Møller, J.; Magnusson, S.S. Heterogeneous Loading of the Human Achilles Tendon In Vivo. Exerc. Sport Sci. Rev. 2015, 43, 190–197. [Google Scholar] [CrossRef] [Green Version]
- Shim, V.; Handsfield, G.; Fernandez, J.; Lloyd, D.; Besier, T. Combining in silico and in vitro experiments to characterize the role of fascicle twist in the Achilles tendon. Sci. Rep. 2018, 8, 13856. [Google Scholar] [CrossRef] [Green Version]
- Hansen, W.; Shim, V.B.; Obst, S.; Lloyd, D.G.; Newsham-West, R.; Barrett, R.S. Achilles tendon stress is more sensitive to subject-specific geometry than subject-specific material properties: A finite element analysis. J. Biomech. 2017, 56, 26–31. [Google Scholar] [CrossRef]
- Kinugasa, R.; Yamamura, N.; Sinha, S.; Takagi, S. Influence of intramuscular fiber orientation on the Achilles tendon curvature using three-dimensional finite element modeling of contracting skeletal muscle. J. Biomech. 2016, 49, 3592–3595. [Google Scholar] [CrossRef] [PubMed]
- Morales-Orcajo, E.; Souza, T.R.; Bayod, J.; Barbosa de Las Casas, E. Non-linear finite element model to assess the effect of tendon forces on the foot-ankle complex. Med. Eng. Phys. 2017, 49, 71–78. [Google Scholar] [CrossRef] [PubMed]
- taş, R.A.; Lucaciu, D.O. Finite Element Analysis of the Achilles Tendon While Running. Acta Med. Marisiensis 2013, 59, 8–11. [Google Scholar] [CrossRef]
- Bozorgmehri, B.; Obrezkov, L.P.; Harish, A.B.; Matikainen, M.K.; Mikkola, A. A contact description for continuum beams with deformable arbitrary cross-section. Finite Elem. Anal. Des. 2023, 214, 103863. [Google Scholar] [CrossRef]
- Obrezkov, L.; Bozorgmehri, B.; Finni, T.; Matikainen, M.K. Approximation of pre-twisted Achilles sub-tendons with continuum-based beam elements. Appl. Math. Model. 2022, 112, 669–689. [Google Scholar] [CrossRef]
- Obrezkov, L.P.; Matikainen, M.K.; Harish, A.B. A finite element for soft tissue deformation based on the absolute nodal coordinate formulation. Acta Mech. 2020, 231, 1519–1538. [Google Scholar] [CrossRef]
- Obrezkov, L.P.; Eliasson, P.; Harish, A.B.; Matikainen, M.K. Usability of finite elements based on the absolute nodal coordinate formulation for the Achilles tendon modelling. Int. J. Non-Linear Mech. 2021, 129, 103662. [Google Scholar] [CrossRef]
- Weiss, J.A.; Maker, B.N.; Govindjee, S. Finite element implementation of incompressible, transversely isotropic hyperelasticity. Comput. Methods Appl. Mech. Eng. 1996, 135, 107–128. [Google Scholar] [CrossRef]
- Annaidh, A.N.; Destrade, M.; Gilchrist, M.D.; Murphy, J.G. Deficiencies in numerical models of anisotropic nonlinearly elastic materials. Biomech. Model. Mechanobiol. 2013, 12, 781–791. [Google Scholar] [CrossRef]
- Escalona, J.L.; Hussien, H.A.; Shabana, A.A. Application of absolute nodal co-ordinate formulation to multibody system dynamics. J. Sound Vib. 1998, 214, 833–851. [Google Scholar] [CrossRef]
- Maqueda, L.G.; Bauchau, O.A.; Shabana, A.A. Effect of the centrifugal forces on the finite element eigenvalue solution of a rotating blade: A comparative study. Multibody Syst. Dyn. 2008, 19, 281–302. [Google Scholar] [CrossRef]
- Shen, Z.; Li, P.; Liu, C.; Hu, G. A finite element beam model including cross-section distortion in the absolute nodal coordinate formulation. Nonlinear Dyn. 2014, 77, 1019–1033. [Google Scholar] [CrossRef]
- Nachbagauer, K.; Gruber, P.; Gerstmayr, J. A 3D Shear Deformable finite element based on the absolute nodal coordinate formulation. Multibody Dyn. 2013, 28, 77–96. [Google Scholar] [CrossRef]
- Obrezkov, L.P.; Mikkola, A.; Matikainen, M.K. Performance review of locking alleviation methods for continuum ANCF beam elements. Nonlinear Dyn. 2022, 109, 531–546. [Google Scholar] [CrossRef]
- Patel, M.; Shabana, A.A. Locking alleviation in the large displacement analysis of beam elements: The strain split method. Acta Mech. 2018, 229, 2923–2946. [Google Scholar] [CrossRef]
- Ebel, H.; Matikainen, M.K.; Hurskainen, V.V.; Mikkola, A. Higher-order beam elements based on the absolut nodal coordinate formulation for three-dimensional elasticity. Nonlinear Dyn. 2017, 88, 1075–1091. [Google Scholar] [CrossRef]
- Abramowitz, M.; Stegun, I.A.; Romer, R.H. Handbook of Mathematical Functions with Formulas, Graphs and Mathematical Tables. Am. J. Phys. 1988, 58, 958. [Google Scholar] [CrossRef] [Green Version]
- Handsfield, G.G.; Greiner, J.; Madl, J.; Rog-Zielinska, E.A.; Hollville, E.; Vanwanseele, B.; Shim, V. Achilles Subtendon Structure and Behavior as Evidenced From Tendon Imaging and Computation Modeling. Front. Sport. Act. Living 2020, 2, 70. [Google Scholar] [CrossRef]
- Yin, N.Y.; Fromme, P.; McCarthy, I.; Birch, H. Individual variation in Achilles tendon morphology and geometry changes susceptibility to injury. eLife 2021, 10, e63204. [Google Scholar] [CrossRef]
- Edama, M.; Kubo, M.; Onishi, H.; Takabayashi, T.; Inai, T.; Yokoyama, E.; Hiroshi, W.; Satoshi, N.; Kageyama, I. The twisted structure of the human Achilles tendon. Scand. J. Med. Sci. Sport. 2015, 25, e497–e503. [Google Scholar] [CrossRef]
- Finni, T.; Bernabei, M.; Baan, G.C.; Noort, W.; Tijs, C.; Maas, H. Non-uniform displacement and strain between the soleus and gastrocnemius subtendons of rat Achilles tendon. Scand. J. Med. Sci. Sport. 2018, 28, 1009–1017. [Google Scholar] [CrossRef] [PubMed]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Elongation [mm] of the Soleus Sub-Tendon | |||
|---|---|---|---|
| Applied Load | Variation of | ||
| [N] | |||
| 10 | 0.143 | 0.146 | 0.168 |
| 20 | 0.286 | 0.289 | 0.313 |
| 30 | 0.430 | 0.433 | 0.457 |
| 40 | 0.574 | 0.578 | 0.602 |
| 45 | 0.647 | 0.650 | 0.675 |
| 60 | 0.864 | 0.868 | 0.893 |
| 80 | 1.157 | 1.160 | 1.186 |
| 90 | 1.304 | 1.307 | 1.333 |
| 100 | 1.451 | 1.454 | 1.481 |
| 150 | 2.197 | 2.201 | 2.228 |
| 200 | 2.958 | 2.961 | 2.989 |
| 300 | 4.524 | 4.527 | 4.557 |
| 400 | 6.151 | 6.155 | 6.187 |
| Elongation [mm] of the Soleus Sub-Tendon | |||
|---|---|---|---|
| Element Number | Variation of | ||
| per Sub-Tendons | |||
| 6.051 | 6.055 | 6.123 | |
| 6.089 | 6.093 | 6.123 | |
| 6.151 | 6.155 | 6.187 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Obrezkov, L.P.; Finni, T.; Matikainen, M.K. Modeling of the Achilles Subtendons and Their Interactions in a Framework of the Absolute Nodal Coordinate Formulation. Materials 2022, 15, 8906. https://doi.org/10.3390/ma15248906
Obrezkov LP, Finni T, Matikainen MK. Modeling of the Achilles Subtendons and Their Interactions in a Framework of the Absolute Nodal Coordinate Formulation. Materials. 2022; 15(24):8906. https://doi.org/10.3390/ma15248906
Chicago/Turabian StyleObrezkov, Leonid P., Taija Finni, and Marko K. Matikainen. 2022. "Modeling of the Achilles Subtendons and Their Interactions in a Framework of the Absolute Nodal Coordinate Formulation" Materials 15, no. 24: 8906. https://doi.org/10.3390/ma15248906